基于TMS320F28335的信号处理电路设计
- 格式:docx
- 大小:27.26 KB
- 文档页数:2
摘要随着计算机技术、微处理器技术以及电力电子技术的发展,基于数字信号处理器(Digital Signal Processor简称DSP)的脉宽调制(Pulse Width Modulation简称PWM)技术被广泛的应用于变频器,风力发电以及电机调速系统中。
在各种PWM 控制方式中,正弦脉宽调制(Sinusoidal PWM)因其算法简单、硬件实现容易、谐波较小以及能动态的修改幅值和频率等优点得到了广泛的应用。
由于数字信号处理技术的发展以及高性能DSP芯片的不断推出,越来越多的SPWM波形的产生都是基于DSP芯片来实现的,这不仅大大简化了硬件电路以及软件的设计,同时在精度和稳定性方面也得到了极大的提高。
本文介绍了采用TI公司推出的TMS320F28335,利用其ePWM模块,基于规则采样法的原理来产生单相SPWM波形的设计,并在示波器上观察了相关波形,同时利用RC低通滤波电路,验证了产生的SPWM波是正确的。
关键词:TMS320F28335;ePWM模块;SPWM1、实验容一、学习TMS320F28335的ePWM 模块的工作原理及其使用方法;二、单相SPWM 波形产生的设计,并验证生成的SPWM 的正确性;三、设计带死区的SPWM 波形;2、实验器材合众达28335控制板、面包板、电阻、电容、杜邦线、示波器(TDS 2012B )等3、实验原理3.1 SPWM 调制与实现原理如图 3.1所示,为了输出逆变器所需要的正弦波,将等腰三角形作为载波(Carrier wave),正弦波为调制波(Modulation wave),正弦调制波与三角载波的交点确定了逆变器开关器件的通断时刻,从而获得了一系列等幅不等宽的矩形脉冲波形,按照面积等效原理,每一个矩形波的面积与相应位置的正弦波面积相等,因此,该序列脉冲与期望的正弦波等效,这就是正弦脉宽调制原理。
本文采用的是双极性方式,即在正弦调制波的半个周期,三角载波在正负之间变化。


电子设计工程Electronic Design Engineering第29卷Vol.29第7期No.72021年4月Apr.2021收稿日期:2020-04-23稿件编号:202004200作者简介:宋耀东(1982—),男,河南新乡人,硕士研究生。
研究方向:电子控制系统设计。
CAN 总线指的是控制器局域网(Controller AreaNetwork ,CAN )总线,是最先由德国博世公司提出的用于汽车控制的一种实时应用的串行通信协议总线网络,因其具有高性能、高可靠性、高实时性和配置灵活等特点,已经成为世界上应用最多的现场总线之一[1-3]。
标准CAN 协议对物理层及数据链路层进行了定义,但在实际应用中还要对应用层进行协议明确[4-5]。
常见的应用层协议有DeviceNET 、J1939、CANOpen 等,这些协议偏重于通用性,其价格昂贵、结构复杂,不适用于具体应用。
因此,通常需要针对具体应用,根据标准CAN 协议设计相应的具体应用总线协议[6]。
随着航天航空电子综合化技术的发展,航天航空器内部的系统功能复杂化和体量庞大化的同时,不同设备之间需要快速、可靠的通信。
只有采用实时、稳定、可靠的数据传输技术才能实现此种需求[7]。
目前,航天飞行器内部常用总线有1553B 总线、CAN 总线等。
1553B 总线采用双余度和指令/响应方式异步通信的可靠性设计,在提高可靠性的同时,其成本也居高不下;而CAN 总线拥有很高的性价比,采用CAN 总线能够降低飞行器的研制成本[8]。
为满足某航天项目多节点高可靠总线通信的需求,从高性能、高可靠性、低成本的角度设计了一种基于TMS320F28335的CAN 总线的硬件接口、通信协议与软件配置。
1CAN 总线系统硬件接口设计CAN 总线是一种有效支持实时控制或分布式控制的串行通信网络。
CAN 总线中的设备都可以通过其控制单元上的CAN 总线接口进行数据的接收和采用TMS320F28335的多节点CAN 总线通信设计宋耀东,于淼,杜雪,李军(中国电子科技集团公司第二十七研究所,河南郑州450047)摘要:根据CAN 总线通信规范和TMS320F28335处理器eCAN 外设特点,设计了CAN 总线多节点通信网络连接方式及接口电路;根据TMS320F28335处理器eCAN 模块的配置规则,设计了CAN 总线数据帧格式,并给出了设置示例,对该模块进行了软件配置,实现了CAN 总线多节点的收发通信。
MS320F28335及其最小应用系统设计TMS320F28335型数字信号处理器是TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
它采用内部供电,外部供电,因而功耗大大降低。
且主频高达150 MHz,处理速度快,是那些需要浮点运算便携式产品的理想选择。
2 TMS320F28335简介TMS320F28335采用176引脚LQFP四边形封装。
其主要性能如下:高性能的静态CMOS技术,指令周期为ns,主频达150MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256K(64K)*l6的Flash存储器,34K(18K)*l6的SARAM存储器.1K*16 OT PROM和8K(4K)*l6的Boot ROM。
其中Flash,OTPROM,16K*l6的SARAM均受密码保护;带()的为2808控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPIO0~ GPIO63连接到该中断。
GPI00-GPI031连接到XINTl,XINT2及XNMI外部中断,G Pl032~GPI063连接到XINT3-XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRP WM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到P IE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序。
基于TMS320F28335DSP的三相电动机控制器的设计概述:速度闭环控制:力矩控制:力矩控制是根据应用的需求对电动机的力矩进行精确控制。
在本设计中,我们将采用矢量控制算法来实现力矩控制。
该算法通过分解电动机的电流和磁场,将电动机的转矩分解为电磁转矩和负载转矩两部分,并通过调整电流的大小和相位来实现对电磁转矩的控制。
硬件设计:硬件设计包括电动机驱动电路、传感器电路和DSP开发板的连接。
为了驱动三相电动机,我们需要使用H桥电路来控制电动机的转向和速度。
传感器电路用于实时采集电动机的转速,并将其反馈给DSP控制器。
最后,我们需要将DSP控制器与电动机驱动电路和传感器电路进行连接,以实现数据的传输和控制。
软件设计:软件设计主要包括初始化配置、速度闭环控制和力矩控制。
在初始化配置中,我们需要对DSP控制器进行初始化设置,包括PWM模块的配置、定时器模块的配置和中断处理函数的设置。
在速度闭环控制中,我们需要编写代码来实现速度的反馈控制,包括定时器的中断处理函数和占空比的调整逻辑。
在力矩控制中,我们需要编写代码来实现矢量控制算法,包括电流大小和相位的计算以及PWM信号的生成。
测试与调试:在完成硬件和软件设计后,我们需要进行测试和调试,以确保电动机控制器的正常运行和准确控制。
通过对不同转速和负载条件下的测试,我们可以评估控制器的性能,并进行必要的调整和优化。
结论:2. T. Xu, "Design of Digital Signal Processor (DSP) Control System for AC Induction Motor", International Journal of Electronics and Electrical Engineering, vol. 6, no. 3, pp. 20-24, 2024.。
基于TMS320F28335的电机控制系统设计电机控制系统在现代工业中起着举足轻重的作用,它被广泛应用于机器人、自动化生产线、电力传输等领域。
随着科技的发展,数字控制系统已经逐渐取代了传统的模拟控制系统,成为了电机控制系统中的主流。
在数字控制系统中,单片机芯片作为控制核心,成为了实现电机控制的重要工具。
本文将基于TMS320F28335单片机芯片,介绍电机控制系统的设计过程。
一、单片机选型在电机控制系统中,单片机芯片作为控制核心至关重要。
因此,单片机的选型是设计过程中最为关键的一步。
TMS320F28335作为一款高性能的DSP芯片,在数字控制系统中广泛应用。
TMS320F28335内置了多个PWM模块、模拟转换器、CAN总线等外设,可以支持多种电机的控制。
二、硬件设计电机控制系统的硬件设计包括电机驱动器、控制板、驱动模块等。
其中,电机驱动器通常使用功率半导体器件,如IGBT、MOSFET等。
控制板上包括单片机、PWM模块、模拟转换器等。
驱动模块是将单片机产生的PWM信号转换成可以驱动电机的电平信号的模块。
根据具体的控制要求,还可以加入如编码器、位置传感器等反馈元件。
三、软件设计电机控制系统的软件设计主要包括控制算法、PID参数的调试以及驱动程序的编写。
控制算法需要根据电机的类型和控制要求进行设计,常见的有矢量控制、FOC控制、直接转矩控制等。
PID 参数的调试是优化控制算法的一个重要步骤,需要根据实际情况进行逐步调整。
驱动程序的编写主要是将控制算法转化为可以在单片机上运行的程序。
四、调试实验在完成软硬件设计之后,需要进行实验调试。
首先进行板级调试,检验电路是否正常。
然后进行控制算法的调试,测试控制效果以及PID参数的设置合理性。
最后进行整个系统的调试。
在实验过程中,还需要注意电机的安全操作。
五、应用场景基于TMS320F28335的电机控制系统可以应用于多种不同类型的电机控制,如直流电机、交流电机、步进电机等。
基于 TMS320F28335的信号处理电路设计摘要:鉴于TMS320F206即将停产,需要寻求一款DSP对其进行替代,替换DSP后的信号处理电路需完成温度值、一路电气零位、三路加表惯性量、三路陀螺惯性量的采集以及惯性量的补偿计算和数据组帧发送的功能。
该信号处理电路基于浮点DSP TMS320F28335,该DSP的引用简化了惯性测量装置中的误差补偿计算,为单位类似的产品提供了一套可行方案。
TMS320F28335丰富的外设使得信号处理电路具有可再简化的潜力,其在惯性测量装置信号处理电路中的应用具有广阔前景。
通过系统试验,验证了系统软硬件设计的正确性高的应用推广价值。
关键词:DSP;信号处理电路;浮点1、前言现有技术方案主要为TMS320F206+异步串口SC28L202的方案,电路上电后完成外围电路的初始化,TMS320F206通过SC28L202相应的I/O完成AD7716的配置,AD7716初始化完成后每隔一个固定时间自动完成加表数据的采集并输出一个中断信号,所采数据存于FIFO中。
陀螺每隔一个固定时间将一帧数据存于SC28L202的FIFO中,当TMS320F206判到第四个AD7716中断来到后从相应的FIFO中取加表、陀螺数据,TMS320F206完成加表、陀螺数据温度补偿计算后组帧并向相应的接口发送数据。
本文以某信号处理电路设计为背景,为了解决TMS320F206即将停产的问题,电路架构由TMS320F206+异步串口SC28L202的方案升级为TMS320F28335+异步串口TL16C752CIPFB架构。
其中DSP为TI公司的TMS320F28335 [1],异步串口为TI公司的TL16C752CIPFB [2]。
2、某信号处理电路原理TMS320F206+异步串口SC28L202架构设计信号处理电路采用了TMS320F206+异步串口SC28L202架构。
信号处理电路主要由加速度计信号采集电路、陀螺信号采集电路、测温电路、数字信号处理及控制电路、外设输出接口电路组成。
本科课程设计报告(2016至2017学年第一学期)设计题目:基于TMS320F28335 DSP微处理器的最小系统设计课程名称:数字信号处理专业名称:电子信息工程行政班级: 1313学号: 1313姓名:洪指导教师:赵报告时间: 2016 年 10 月 23 日目录一、引言TMS320F28335型数字信号处理器TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
TMS320F28335具有150MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和 EMIF,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出 (HRPWM),12位16通道ADC。
得益于其浮点运算单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代DSC相比,平均性能提高50%,并与定点C28x控制器软件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
F2833X在保持150MHz时钟速率不变的情况下,新型F2833X浮点控制器与TI前代领先数字信号控制器相比,性能平均提高50%。
与作用相当的32位定点技术相比,快速傅立叶转换(FFT)等复杂计算算法采用新技术后性能提升了一倍之多。
二、设计目的TMS320F28335及其最小应用系统是最基本的硬件和软件环境。
设计目的是能使用Protel设计电路原理图;了解F28335硬件的相关知识及电路设计;能使用CCS建立并调试DSP工程。
通过F28335最小电路的设计,可以将理论与实践统一联系,更深入地理解F28335的开发方法。
三、设计要求1、利用Protel软件绘制并添加TMS320F28335的原理图库;2、利用Protel软件绘制TMS320F28335最小系统的电路原理图,包括时钟电路模块,电源模块、复位电路模块、JTAG接口模块;3、安装最小系统电路,在CCS下建立工程,编译并将其下载到TMS320F28335最小系统中运行。
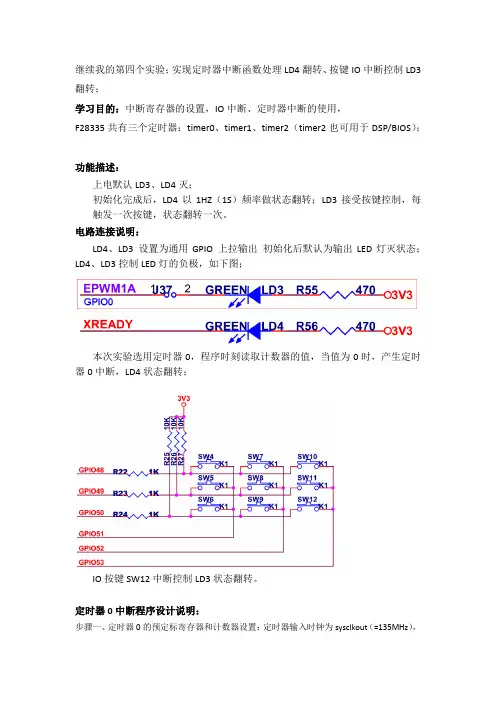
继续我的第四个实验;实现定时器中断函数处理LD4翻转、按键IO中断控制LD3翻转;学习目的:中断寄存器的设置,IO中断、定时器中断的使用,F28335共有三个定时器:timer0、timer1、timer2(timer2也可用于DSP/BIOS);功能描述:上电默认LD3、LD4灭;初始化完成后,LD4以1HZ(1S)频率做状态翻转;LD3接受按键控制,每触发一次按键,状态翻转一次。
电路连接说明:LD4、LD3设置为通用GPIO 上拉输出初始化后默认为输出LED灯灭状态;LD4、LD3控制LED灯的负极,如下图;本次实验选用定时器0,程序时刻读取计数器的值,当值为0时,产生定时器0中断,LD4状态翻转;IO按键SW12中断控制LD3状态翻转。
定时器0中断程序设计说明:步骤一、定时器0的预定标寄存器和计数器设置:定时器输入时钟为sysclkout(=135MHz),1、如果定时1S(即1Hz)中断一次(即计数结束),1Hz=135Mhz/1350/100000预定标寄存器(即分频器)设为1350,计数器设为100000;2、如果定时1ms(即1000Hz)中断一次,计算公式为:1000Hz=135Mhz/1350/100预定标寄存器同样设为1350,计数器设为100;赋值语句如下://定时器0 设为1Hz = 135MHz/(1350*100000)CpuTimer0Regs.PRD.all= 100000;//计数周期寄存器,100000周期后计数器减为0CpuTimer0Regs.TPR.bit.TDDR= 1350& 0xFF;//0x546 预定标寄存器(预分频器)CpuTimer0Regs.TPRH.bit.TDDRH = (1350>>8) & 0x00FF;//0x546 预定标寄存器(预分频器)步骤二、a)设置定时器0相关中断寄存器使能定时器0中断,即CpuTimer0Regs.TCR.bit.TIE= 1; //使能定时器0中断b)设置PIE级相关中断寄存器定时器0中断所在PIE组使能,即PIEIERx寄存器设置c)设置CPU级中断相关寄存器CPU级使能上述PIE对应的通道,即IER寄存器设置步骤三、中断向量入口映射位置设置,如下:EALLOW; // This is needed to write to EALLOW protected registersPieVectTable.TINT0 = &cpu_timer0_isr; //将中断函数物理地址赋值给中断向量入口PieVectTable.XINT3 = &key_GPIO50_isr;EDIS; // This is needed to disable write to EALLOW protected registersIO中断程序设计说明:步骤一、设置IO引脚功能复用寄存器为普通IO、设为上拉、输入状态、使能引脚滤波功能;外部中断源选择寄存器设置:如GpioIntRegs.GPIOXINT3SEL.bit.GPIOSEL=50;//按键引脚编号设置步骤二、使能外部中断源中断;XIntruptRegs.XINT3CR.bit.ENABLE=1;//使能中断设置触发方式:XIntruptRegs.XINT3CR.bit.POLARITY=0;//下降沿触发剩余步骤同定时器0中断的设置。
基于TMS320F28335的伺服驱动器的设计【摘要】本文设计了一种基于DSP的交流伺服电机驱动器的组成和总体设计方案。
该驱动器采用TMS320F28335为核心控制电路,设计完成了驱动电路和人机交互界面电路,同时完成了软件程序设计。
【关键词】DSP;伺服驱动器;TMS320F28335引言伺服驱动系统是机电一体化技术的重要组成部分,随着现代工业的快速发展,交流伺服系统逐渐成为工业伺服系统的主流,在数控机床、工业控制等自动化装备中得到广泛的应用。
本文介绍了一种基于TMS320F28335的伺服驱动器设计方案。
TMS320F28335是TI公司设计的一款数字信号处理器,其主要面向工业控制领域,特别适用于电机控制、运动控制等应用。
1.伺服驱动器结构及原理伺服驱动器主要由DSP(TMS320F28335)、主电路、驱动模块、检测模块、通信模块和人机接口模块等部分组成,如图1所示。
图1 伺服驱动器原理框图伺服驱动器通过光电编码器和电流传感器将电机的转速,方向和电流信号送给DSP处理器,将给定的信号与采集的信号进行比较,经过PID控制算法后输出SPWM波形,使电机达到所设定值。
2.硬件系统设计2.1 DSP控制器TMS320F28335芯片主频150MHz,具有32位浮点运算能力,6个DMA通道,支持ADC,McBSP,ePWM,XINTF 和SARAM,片内有256K×16大小的FLASH程序存储器和34K×16大小的SARAM,具有18路的PWM输出,采用1.8V内核电压,3.3V外围接口电压供电。
2.2 主电路及驱动电路2.2.1 电源模块TMS320F28335工作电源为 3.3V和 1.9V/1.8V。
所以采用了TI公司的TPS767D318芯片给DSP供电。
该芯片是TI公司专为DSP供电所设计,输入电压为5V,能同时产生3.3V和1.8V两种电压,而且该芯片自带电源监控和复位功能。
基于tms320 f28335信号处理板的设计与实现
德州仪器 TMC28335 是一款高性能、低功耗的数字信号处理板,可用于信号处理、图像处理、音频处理等领域。
在此板上可以集成多个外围设备,如串口、I2C、SPI、GPIO 等,方便与外部设备进行通
信和交互。
本文将介绍基于 TMC28335 信号处理板的设计与实现。
首先,需要根据实际需求选择合适的外围设备,例如摄像头、音频输入设备等。
然后在 TMC28335 信号处理板上配置相应的硬件资源,例如 ADC、DAC、GPU 等,以便与外部设备进行通信和交互。
其次,需要编写相应的软件程序,对外部设备采集到的数据进行处理。
例如,在处理音频信号时,可以采用基于 FFT 算法的信号处
理流程,对音频信号进行频谱分析、滤波等处理。
同时,还需要注意软件资源的合理分配,以保证程序的高效性和稳定性。
最后,需要进行测试和调试,以确保信号处理板的功能和质量。
测试和调试过程中,可以采用模拟信号、数字信号等多种方式,对信号处理板进行功能验证和性能评估。
基于 TMC28335 信号处理板的设计与实现需要合理分配硬件资
源和软件程序,同时进行测试和调试,以确保信号处理板的功能和质量。
98基于TMS320F28335的DSP最小系统设计基于TMS320F28335的DSP最小系统设计Design of DSP Minimum System Based on TMS320F28335谭威罗仁泽高文刚(西南石油大学电气学院,四川成都610500)周慧琪(西安电子科技大学计算机学院,陕西西安710071)摘要在各大专院校的课程教学、实验教学、毕业设计以及电子设计竞赛中,需要应用DSP实验系统。
介绍了TI公司的TMS320F28335 芯片的性能特点,给出了由TMS320F28335 组成的DSP 最小应用系统。
详细介绍了各部分电路的设计方法。
该系统可满足教学要求,也可用于简单的工程研究和应用开发。
关键词:数字信号处理器,最小应用系统,浮点DSP,TMS320F28335AbstractIn the colleges and universities teaching,experiment teaching,the graduation design and electronic design competition,need-ed to use DSP experiment system.This paper introduces the TI company TMS320F28335 chip performance characteristics,is giv-en up of TMS320F28335 DSP minimum application system.Detailed introduces each part of the circuit design method.Keywords:digital signal processor,minimum application system,fixed-point DSP,TMS320F28335TMS320F28335 数字信号处理器是 TI 公司的一款 C2000 系列的浮点DSO控制器,与以往的定点DSP相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
TMS320f28335控制AD7656的硬件电路设计
TMS320F28335简介TMS320F28335是一款TI高性能TMS320C28x系列32位浮点DSP处理器。
TMS320F28335型数字信号处理器TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
TMS320F28335具有150MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和EMIF,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM),12位16通道ADC。
得益于其浮点运算单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代DSP相比,平均性能提高50%,并与定点C28x控制器软件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
TMS320F28335核心板电气特性TMS320F28335(SOM-TL28335核心板)工作环境
环境参数\最小值\典型值\最大值
工业级温度:0C\-\85C
工作电压:4.8V\5V\5.5V
SOM-TL28335(TMS320F28335)核心板功耗
供电电压:5V
输入电流:292mA
额定功率:1.46W
TL28335-EVM开发板功耗
供电电压:5V
最大输入电流:400mA
最大功率:2W。
基于TMS320F28335的SVPWM实现方法SVPWM/TMS320F28335/DSP/电机控制1引言随着电机控制理论的日趋成熟和微处理器的不断优化,脉宽调制(PWM)技术在变频器中得到了广泛的应用。
如今,PWM开关信号的控制方法最常见的有正弦脉宽调制(SPWM)和空间矢量脉宽调制(SVPWM)。
与SPWM方法相比,SVPWM方法具有电压谐波小,直流电压利用率高,电动机的动态响应快,减少电动机的转矩脉动,易于实现数字化等显著的优点,从而使SVPWM方法的实际应用愈来愈广泛[1,5]。
TMS320F28335数据信号处理器是TI公司最新推出的32位浮点DSP控制器,具有150MHz的高速处理能力,18路PWM输出,与TI前几代数字信号处理器相比,性能平均提高了50%,并可与定点C28x控制器软件兼容[2,3]。
其浮点运算单元,可以显著地提高控制系统的控制精度和处理器的运算速度,是目前控制领域最先进的处理器之一。
可以应用到参数辨识等需要大运算量的电机实时控制系统中。
以下介绍基于TMS320F28335的SVPWM基本原理和实现方法。
2 SVPWM的基本原理SVPWM是利用逆变器的功率开关器件的不同开关组合合成有效电压矢量来逼近基准圆[4.5]。
图1为三相电压源逆变器(VSI)的拓扑结构[2.3]。
图1三相电压型逆变器为便于分析理解,图1可以简化为图2所示。
图2三相电压型逆变器电路桥在图1中,V a、V b、V c是逆变器的输出相电压,Q1~Q6为6个功率开关晶体管,它们分别由a,a’,b,b’,c,c’个控制信号控制。
当逆变器上桥臂的一个功率开关晶体管开通状态(a或b 或c为1)时,下半桥臂的相对功率开关晶体管必须为关闭状态(a’或b’或c’为0);同理,当下桥臂开关晶体管为开通状态(a’或b’或c’为1)时上桥臂的相对功率开关晶体管必须为关闭状态(a或b或c为0)。
对于图1、图2所示的逆变器,其开关状态组合(c b a)有8种基本工作状态,即:000、001、010、011、100、101、110、111,其中除了000和111工作状态为无效状态,称为零矢量外,其余六种工作状态为有效状态,称为非零矢量。
基于TMS320F28335的信号处理电路设计
摘要:鉴于TMS320F206即将停产,需要寻求一款DSP对其进行替代,替换DSP
后的信号处理电路需完成温度值、一路电气零位、三路加表惯性量、三路陀螺惯
性量的采集以及惯性量的补偿计算和数据组帧发送的功能。
该信号处理电路基于
浮点DSP TMS320F28335,该DSP的引用简化了惯性测量装置中的误差补偿计算,为单位类似的产品提供了一套可行方案。
TMS320F28335丰富的外设使得信号处
理电路具有可再简化的潜力,其在惯性测量装置信号处理电路中的应用具有广阔
前景。
通过系统试验,验证了系统软硬件设计的正确性高的应用推广价值。
关键词:DSP;信号处理电路;浮点
1、前言
现有技术方案主要为TMS320F206+异步串口SC28L202的方案,电路上电后
完成外围电路的初始化,TMS320F206通过SC28L202相应的I/O完成AD7716的
配置,AD7716初始化完成后每隔一个固定时间自动完成加表数据的采集并输出
一个中断信号,所采数据存于FIFO中。
陀螺每隔一个固定时间将一帧数据存于
SC28L202的FIFO中,当TMS320F206判到第四个AD7716中断来到后从相应的FIFO中取加表、陀螺数据,TMS320F206完成加表、陀螺数据温度补偿计算后组
帧并向相应的接口发送数据。
本文以某信号处理电路设计为背景,为了解决TMS320F206即将停产的问题,电路架构由TMS320F206+异步串口SC28L202的方案升级为TMS320F28335+异步
串口TL16C752CIPFB架构。
其中DSP为TI公司的TMS320F28335 [1],异步串口为
TI公司的TL16C752CIPFB [2]。
2、某信号处理电路原理TMS320F206+异步串口SC28L202架构设计
信号处理电路采用了TMS320F206+异步串口SC28L202架构。
信号处理电路
主要由加速度计信号采集电路、陀螺信号采集电路、测温电路、数字信号处理及
控制电路、外设输出接口电路组成。
如果继续使用现有方案,现面临几个问题,主要表现在以下几个方面。
(1)TMS320F206即将停产,本方案中的DSP需进行更换;
(2)另外由于TMS320F206为定点DSP,而在补偿计算时要进行浮点运算,为满足
这种需要,在进行补偿时需要对数据进行复杂的移位操作,补偿计算耗时较多,
效率低下;
(3)总体需要更换异步串口SC28L202。
为了解决上述问题,DSP采用TI公司的TMS320F28335 ,异步串口采用TI公
司TL16C752CIPFB实现。
该方法可以解决上述问题,但是,由于引入了DSP
TMS320F28335 ,异步串口TL16C752CIPFB,需要研究基于TMS320F28335的信号
处理电路设计,实现DSP、稳定、可靠的工作。
3、基于TMS320F28335信号处理电路架构设计
TMS320F28335数字信号处理器是属于TI公司C2000系列的一款浮点DSP控
制器,详细信息如下。
(1)单周期指令执行时间:最快达6.67ns;
(2)CPU: 32为定点处理器、单精度浮点运算单元、32位算术逻辑单元、16位×16位乘法器和32位×32位乘法器;
(3)存储器:地址空间为2M×16、SRAM为34K×16、OTP ROM为1K×16、引导
ROM为8K×16、FLASH为256K×16;
(4)片内外设:3个定时器、87个复用I/O引脚、1个同步串行口、3个异步串行口、2个eCAN、1个I2C、8个外部中断、16个通道12位ADC;
(5)供电电压:I/O口:3.3V、内核:1.9V。
与以往的定点DSP相比,该器件的精度高,成本低,功耗小,外设集成度高,数据及程序存储量大,AD转换精度更精确快速等。
TMS320F28335具有150MHz
的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和EMIF,有多达18路得PWM输出,其中6路为TI特有的更高精度的PWM输出(HRPWM),12和16通道的ADC,得益于浮点运算单元,用户可快速编写控制
算法而无需在处理小数操作上耗费过多的时间和精力,并与定点C28x控制器软
件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
信号处理电路主要由加速度计信号采集电路、陀螺信号采集电路、测温电路、数字信号处理及控制电路、外设输出接口电路组成,其原理框图如图1所示。
图1 信号处理电路原理框图
信号处理电路上电完成初始化,当中断到来后,TMS320F28335将从第一片
缓存器1中取出AD7716的转换结果。
延时一段时间后,TMS320F28335再从
SC28L202的FIFO中读取光纤陀螺输出的数据,然后按系统要求对取得的加速度
计和光纤陀螺数据做相应补偿计算并进行数据组帧,然后每隔一定时间发送给外
设设备。
由于TMS320F28335具备32位浮点处理单元,在进行惯性量全温误差补偿时不用考虑采用定点DSP时浮点计算的复杂移位操作。
这极大地简化了补偿计算,
提高了效率,与此同时这也简化了基于定点DSP惯性测量装置的标定系数,使标
定系数的计算更加简单。
此外,本方案中只用到了TMS320F28335小部分的硬件功能,完全开发出TMS320F28335的功能对与简化信号处理电路具有重要的意义。
5、结论
综上所述,数字信号处理器TMS320F28335在惯性测量装置信号处理电路中
的应用简化了以往补偿计算中的复杂工作,丰富的外设使得信号处理电路具有可
再简化的潜力,其在信号处理电路中的应用具有广阔前景。
试验结果表明,该方
法工程实现简单,措施有效,达到了实际工程应用状态,具有较高的应用推广价值。
参考文献:
[1] 《TMS320F28335 DSP原理及开发编程》.刘陵顺.北京航空航天大学出版社;2011.
[2] 《TL16C752CIPFB 使用手册》.TI公司;2016.。