Ch2 递阶控制系统
- 格式:pdf
- 大小:757.49 KB
- 文档页数:45

设计二:二阶系统串联校正装置设计与分析一设计题目设某被控系统的传递函数G(s)如下:)2()(+=s s K s G二设计要求选用合适的方法设计一个串联校正装置K(s),使闭环系统的阶跃响应曲线超调量%20%<σ,过渡过程时间)(5.1s T s ≤,开环比例系数)/1(10s K v ≥,并分析串联校正装置中增益、极点和零点对系统性能的影响。
三设计内容1. 设计方法:采用根轨迹校正工具进行串联校正2. 设计步骤:[1] 启动SISO 设计器在MATLAB 命令窗口中直接键入sisotool 命令,启动SISO Design Tool[2] 控制系统结构图选择串联校正系统结构图:控制器C 与控制对象G 串联,在引入单位负反馈构成闭环系统[3] 输入系统模型当选定系统的结构后,为所设计的线性系统输入模型数据。
根据设计要求:开环比例系数)/1(01s K v ≥ 即 20102)(lim 0≥≥==→k ks sG k s v 得 取k=40, 传递函数)2(40)(+=s s s G在控制器C 取值为常数1的情况下,绘制此单位负反馈线性系统的根轨迹图、系统的伯德图以及闭环阶跃响应曲线10101010Frequency (rad/sec)Open-Loop Bode E ditor (C)Root Locus E ditor (C)Real AxisStep ResponseTime (sec)A m p l i t u d e由阶跃响应曲线可以看到,此时在没有串联校正装置情况下,超调量%20%60%>=σ,过渡过程时间)(5.1)(5.3s s T s >=达不到指标要求。
[4] 系统设计在完成线性系统数据的输入之后,在SISO Design Tool 窗口中,对控制器C 进行设置。
利用增加和删除零极点的设置菜单,对控制器C 的零极点任意设置。
同时对控制器C 的增益进行设置。
[5] 系统分析在系统设计完成后,需要对其做进一步分析。
引言目前已开发的沥青洒布车的智能控制只是实时调节,而未达到真正利用人工智能技术进行控制,提高沥青洒布车的智能性,满足工程需要和提高工作效率以及质量,尤其是快捷性、实时性和智能性。
智能控制系统即人工智能在沥青洒布车中的应用,应包括递阶控制系统、专家控制系统、模糊控制系统、神经控制系统、学习控制系统、仿人控制系统以及进化控制系统等。
递阶控制系统是在研究早期学习控制的基础上,从工程控制角度总结人工智能与自适应控制、自学习控制和自组织控制的关系之后而逐渐形成的,也是智能控制的最早和成熟理论之一[1]。
1沥青洒布车智能递阶控制系统1.1沥青洒布车智能递阶控制系统的组成1.1.1驾驶控制系统该系统如图所示,包括行为决策、行为规划、操作控制等主要模块。
本系统对受控对象的非线性、环境的严重不确定具有较好的适应能力,能够满足系统的实时性要求;其方向及速度跟踪精度高,并具有系统的监督模块,可实现系统状态的在线监督、预警以及喷洒量的调节。
1.1.2硬件条件包括主控计算机、执行机构和传感器。
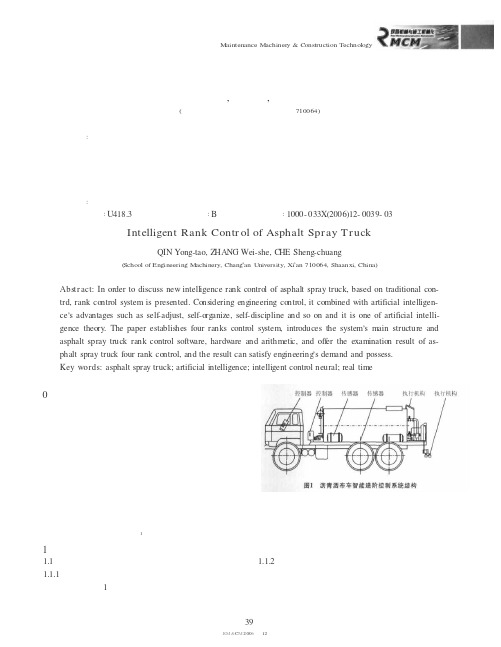
系统选用高性能的微处理器作为其主控计算机,主控计算机配置图1沥青洒布车智能递阶控制系统结构沥青洒布车智能递阶控制系统秦永涛,张伟社,车胜创(长安大学!工程机械学院,陕西!西安710064)摘要:为了探讨沥青洒布车的新智能控制方式,在传统的沥青洒布车智能控制的基础上,提出利用智能递阶控制的自适应性、自学习、实时性等优点,使沥青洒布车能根据工作环境的变化进行调节,保证其喷洒恒定和实时性,使其具有良好的作业质量。
建立了递阶控制四层系统,介绍了该系统的总体结构和沥青洒布车递阶控制系统的软件结构与硬件结构以及算法,并给出了沥青洒布车的四层递阶控制的试验结果,能实时达到工程施工较高的作业要求。
关键词:沥青洒布车;人工智能;递阶控制;实时性中图分类号:U418.3文献标识码:B文章编号:1000-033X(2006)12-0039-03Intelligent Rank Contr ol of Asphalt Spray TruckQIN Yong-tao,Z HANG Wei-she,CHE Sheng -chuang(S chool of Engineering Machinery,Chang #an University,Xi #an 710064,Shaanxi,China)Abstr act:In order to discuss new intelligence rank contro l of asphalt spray truck,based on traditional con-trd,rank co ntrol sy stem is presented.Co nsidering eng ineering co ntrol,it co mbined with artificial intelligen-ce #s advantages such as self -adjust,self-o rg anize,self-discipline and so on and it is one of artificial intelli-gence theo ry .The paper establishes four ranks control sy stem,introduces the system #s main structure and asphalt spray truck rank control softw are,hardw are and arithmetic,and off er the examinatio n result of as-phalt spray truck four rank co ntrol,and the result can satisfy eng ineering #s demand and possess.Key words:asphalt spray truck;artificial intelligence;intelligent control neural;real time养护机械与施工技术Maintenance Machiner y &Construction Technology1有标准的工业I/O 接口板,驾驶控制系统的接口有A/D 转换器、各种运动控制卡、计数器以及数字量输入输出设备等,其结构示意图如图2。
设计一:二阶系统的PID控制器设计及参数整定一设计题目21()225G ss s=++二设计要求1.控制器为P控制器时,改变比例系数大小,分析其对系统性能的影响并绘制相应曲线。
2.控制器为PI控制器时,改变积分时间常数大小,分析其对系统性能的影响并绘制相应曲线.(例如当kp=50时,改变积分时间常数)3.设计PID控制器,选定合适的控制器参数,使闭环系统阶跃响应曲线的超调量σ%<20%,过渡过程时间Ts〈2s,并绘制相应曲线。
图2 闭环控制系统结构图三设计内容1.控制器为P控制器时,改变比例系数pk大小P控制器的传递函数为:()P PG s K=,改变比例系数pk大小,得到系统的阶跃响应曲线仿真结果表明:随着Kp 值的增大,系统响应超调量加大,动作灵敏,系统的响应速度加快。
Kp 偏大,则振荡次数加多,调节时间加长.随着Kp 增大,系统的稳态误差减小,调节应精度越高,但是系统容易产生超调,并且加大Kp 只能减小稳态误差,却不能消除稳态误差。
程序:num=[1];den=[1 2 25]; sys=tf(num,den ); for Kp=[1,10:20:50] y=feedback (Kp*sys,1); step (y ); hold ongtext (num2str(Kp )); end2. 控制器为PI 控制器时,改变积分时间常数i T 大小(50 pK 为定值)PI控制器的传递函数为:11()PI PIG s KT s=+⋅ ,改变积分时间常数iT大小,得到系统的阶跃响应曲线仿真结果表明:Kp=50,随着Ti值的加大,系统的超调量减小,系统响应速度略微变慢。
相反,当Ti的值逐渐减小时,系统的超调量增大,系统的响应速度加快。
Ti越小,积分速度越快,积分作用就越强,系统震荡次数较多.PI控制可以消除系统的稳态误差,提高系统的误差度。
程序num=[1];den=[1 2 25];Kp=50;sys=tf(num,den);for Ti=1:2:7PI=tf(Kp*[Ti 1],[Ti 0]);y=feedback(PI*sys,1);step(y,8)hold ongtext (num2str(Ti)); end3。
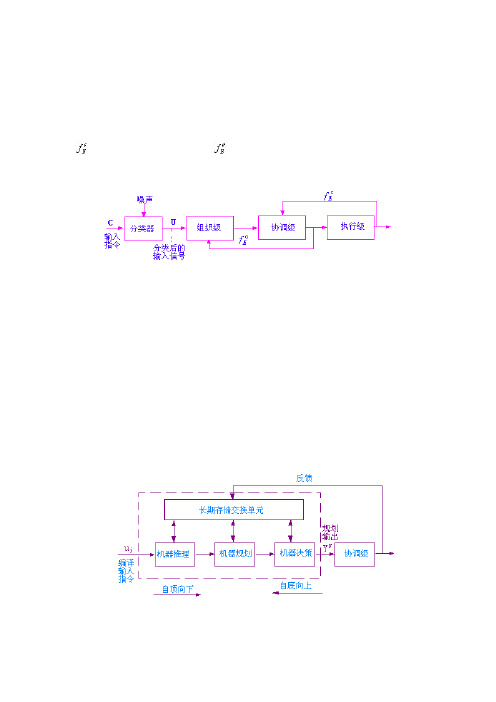
第二章 递阶控制系统2.1 递阶智能机器的一般理论2.1.1 递阶智能机器的一般结构1.递阶智能机器的级联结构递阶智能控制系统是由三个基本控制级构成的,其级联交互结构如图2.1所示。
图中,为自执行级至协调级的在线反馈;为自协调级至组织级的离线反馈信号;C = {c1,c2, ... , c m}为输入指令;U = {u1, u2, ... , u m}为分类器的输出信号,即组织器的输入信号。
图2.1 递阶智能机器的级联结构这一递阶智能控制系统是个整体,它把定性的用户指令变换为一个物理操作序列。
系统的输出是通过一组施于驱动器的具体指令来实现的。
一旦接收到初始用户指令,系统就产生操作,这一操作是由一组与环境交互作用的传感器的输入信息决定的。
这些外部和内部传感器提供工作空间环境(外部)和每个子系统状况(内部)的监控信息;对于机器人系统,子系统状况,有位置、速度和加速度等。
智能机器融合这些信息,并从中选择操作方案。
图2.1所示的三级递阶结构具有自顶向下(top-down)和自底向上(bottom-up)的知识(信息)处理能力。
自底向上的知识流决定于所选取信息的集合,这些信息包括从简单的底层(执行级)反馈到最高层(组织级)的积累知识。
反馈信息是智能机器中学习所必需的,也是选择替代动作所需要的。
2. 组织级(Organization level)组织级代表控制系统的主导思想,并由人工智能起控制作用。
根据贮存在长期存储内的本原数据集合,组织器能够组织绝对动作、一般任务和规则的序列。
换句话说,组织器作为推理机的规则发生器,处理高层信息,用于机器推理、规划、决策、学习(反馈)和记忆操作,如图2.2所示。
图2.2 组织级的结构框图3. 协调级(Organization level)协调级是上(组织)级和下(执行)级间的接口,承上启下,并由人工智能和运筹学共同作用。
协调级借助于产生一个适当的子任务序列来执行原指令,处理实时信息。

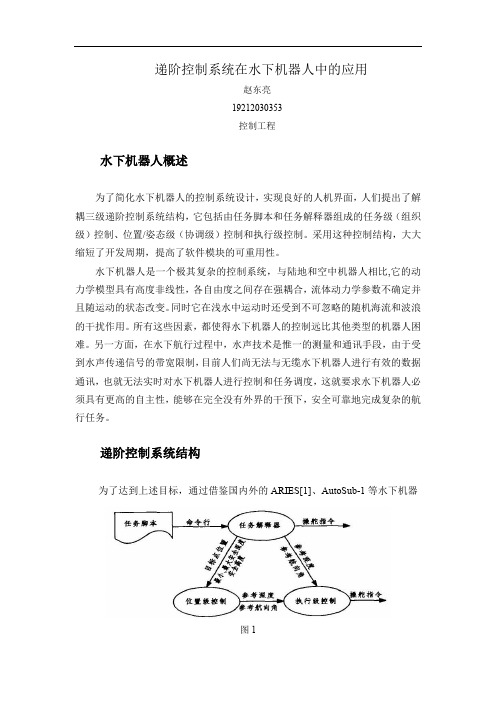
递阶控制系统在水下机器人中的应用赵东亮19212030353控制工程水下机器人概述为了简化水下机器人的控制系统设计,实现良好的人机界面,人们提出了解耦三级递阶控制系统结构,它包括由任务脚本和任务解释器组成的任务级(组织级)控制、位置/姿态级(协调级)控制和执行级控制。
采用这种控制结构,大大缩短了开发周期,提高了软件模块的可重用性。
水下机器人是一个极其复杂的控制系统,与陆地和空中机器人相比,它的动力学模型具有高度非线性,各自由度之间存在强耦合,流体动力学参数不确定并且随运动的状态改变。
同时它在浅水中运动时还受到不可忽略的随机海流和波浪的干扰作用。
所有这些因素,都使得水下机器人的控制远比其他类型的机器人困难。
另一方面,在水下航行过程中,水声技术是惟一的测量和通讯手段,由于受到水声传递信号的带宽限制,目前人们尚无法与无缆水下机器人进行有效的数据通讯,也就无法实时对水下机器人进行控制和任务调度,这就要求水下机器人必须具有更高的自主性,能够在完全没有外界的干预下,安全可靠地完成复杂的航行任务。
递阶控制系统结构为了达到上述目标,通过借鉴国内外的ARIES[1]、AutoSub-1等水下机器图1人的控制系统结构,我们提出了如图1所示的水下机器人实时控制系统。
该控制结构基本上属于简化的三层递阶控制。
任务级(组织级)控制它相当于递阶控制系统中的组织级(Organizatoin Level)。
按照递阶控制的定义,组织级代表控制系统的主导思想,并由人工智能起控制作用,根据数据库中的先验知识,产生一般任务序列。
但是对于当前的水下机器人“自主”仅仅是指预先编程,绝大多数都不具有一般意义上的人工智能。
本文所提出的任务级控制实际上是一种任务解释器(Mission Interpreter) , 它根据预先制订的任务脚本和当前的系统时钟、航行状态等信息, 确定本控制周期应执行的任务, 并从脚本中提取控制参数。
任务脚本在控制计算机中通常以文本文件的形式存在。
二阶系统的最优控制Ξ肖 滨(海军潜艇学院 青岛 266071) 摘 要 应用最优控制理论验证了二阶系统最优控制为典型的Bang 2Bang 控制,通过理论推导得出了其相轨迹,并讨论了二阶系统最优控制的实现。
关键词 最优控制 二阶系统 Bang 2Bang 控制The Opti m al Con trol of Second -Order SystemX iao B in(N avy S ub m arine A cad e m y ,Q ing d ao ,266071) ABSTRACT T h is paper demo strated that the op ti m al contro l of second 2o rder system is the typ ical Bang 2Bang contro l by app lying the Op ti m al Contro l T heo ry .T he state track about th is contro l m ethod is obtained also by using theo ry inference ,and how to realize the op ti m al contro l of second 2o rder system is discussed deep ly at last .KEY WOR D S op ti m al contro l ,second 2o rder system ,Bang 2Bang contro l在雷达声纳等控制系统中,都涉及到目标自动搜索及跟踪问题,而其控制一般都采用闭环自动控制和调整实现,对于二阶系统而言,如何获得最优控制,使系统动态性能达到最快速的跟踪控制效果,一直是人们所关注的问题。
二阶系统的传递函数为 H (S )=k mS (S T m +1)(1)采用图1所示的闭环控制后,其传递函数为H (S )=K m T mS 2+S T m +K m T m (2)图2是二阶闭环系统阶跃响应曲线,可以看出:当系统阻尼太大时,系统响应时间长;而当系统阻尼太小时,输出超调量又太大。
集控技师复习题汽机部分1、汽轮机运行中振动突然增大,分析原因?如何处理?(根据不同情况,不同处理)答:1、动静部分摩擦或局部碰撞。
2、叶片断裂飞出,引起转子转动不平衡。
3、转子部件在高转速时松动或发生不对称位移。
4、轴承钨金脱壳损坏。
5、水冲击大轴弯曲。
6、周率变化。
7、汽温或负荷突降或突升,使机组膨胀不均匀。
8、油温过低使油膜破坏或发生油膜震荡。
9、油压下降,油温不足,油膜破坏。
2、什么是单元机组协调控制系统(CCS)?其功能是什么?答:单元机组协调控制系统把锅炉和汽轮发电机组作为一个整体进行控制,采用了递阶控制系统结构,把自动调节、逻辑控制、联锁保护等功能有机地结合在一起,构成一种具有多种控制功能,满足不同运行方式和不同工况下控制要求的综合控制系统。
CCS需要根据负荷调度指令进行负荷管理,消除运行时机、炉间各种扰动,协调控制锅炉的燃烧控制、给水控制、汽温控制与辅助控制子系统,保持锅炉、汽机之间的能量平衡,并在机组主、辅机设备的能力受到限制的异常工况下进行联锁保护。
3、DEH调节系统的优点?答:1、改进了控制特性。
2、机组带负荷时可以从喷嘴调节转换为节流调节。
3、适应了工艺流程改进的灵活性。
4、汽轮机能自启动和自动加减负荷及自动监视。
5、参数显示和趋势记录。
6、 CRT显示。
7、计算机间的数据传递。
4、操作员自动方式下,DEH负荷的目标值、给定植与实际植之间的关系。
DEH受那几种反馈信号?答:在操作员自动方式下,目标值由运行人员给出,是一个阶跃信号;在正常情况下设定值是设定值形成回路根据运行人员给出的目标值和基本计算得到,或者根据来自CCS或电器的信号计算得到,在异常情况下,根据异常信号(如:RB信号,TPC动作信号等)计算得到,变负荷(或变速)设定只是一个平滑的斜坡信号,且易于保持以便于实施对机组的控制;实际值(转速或负荷)是机组的实际输出及控制系统根据设定值对机组实施控制的最终结果。
DEH系统接受汽轮机转速、发电机功率和高、中压缸第一级后压力三种反馈信号5、为防止动静摩擦,运行操作上应注意那些问题?答:在运行方面,主要是防止动静摩擦,运行人员除了要采取防止动静摩擦的有关措施以外,还应特别注意以下几点:⑴每次起动前必须认真检查大轴的晃动度,确认大轴挠曲度在允许的范围以内才可进行起动。
2,2 Second-Order SysfetnsFrom the frequency-domain viewpoint, system order refers to the highest power of s in the denominator of the closed-loop tran sfer function of a system .In the time-domain, system order refers to the highest derivative of the controlled quantity in the equation describing the control system's dynamics. System order is very significant parameter for characterizing a system.在频域里,系统的阶次指的是系统的闭环传递函数分母s的最高次。
在时域里,系统的阶次指的是描述控制系统动力学方程的最高阶导数。
系统的阶次是一个非常重要的参数对于描述一个系统的特征。
Sec on d-order systems are very important to the con trol-system engineering. This type of system characterizes the dynamics of many control-system applications found in the fields of servomechanisms, space-vehicle control, chemical process control, bioengineering; aircraft control systems, hip controls, etc. It is interesting to note that most control system designs are based on second order system analysis. Even if the system is of higher order, as it usually is, the systems may be approximated by a sec on d-order system in order to obtain a first approximation for preliminary design purposes with reas on able accuracy. A more exact soluti on can then be obtai ned in terms of departures from the performanee of a second-order system.二阶系统是一个非常重要的控制系统。
Intelligent Control 智能控制蔡自兴肖晓明余伶俐中南大学 Central South University (CSU)Ch.2 Hierarchical Control Systems递阶控制系统讲授:蔡自兴中南大学 Central South University (CSU)2Ch.2 Hierarchical Control Systems 递阶控制系统教学重点 1.介绍递阶智能机器及其三个级别的一般结构; 2.讨论递阶控制各级的作用; 3.举例介绍智能控制的应用。
教学难点 1.理解递阶控制的结构及各级的分工协作关系; 2.了解汽车自主驾驶系统的递阶控制结构和控制算法。
教学要求 着重掌握递阶控制的作用机制,举例分析递阶控制系统的 结构与控制算法。
中南大学 Central South University (CSU)3问题1第一章中谈过萨里迪斯对 第一章中谈过萨里迪斯对 智能控制的贡献有哪些? 智能控制的贡献有哪些?中南大学 Central South University (CSU)Hierarchical Control Systems 递阶控制系统The formation of hierarchical intelligent control is based on the studying of early learning control and the summary of the relationships among artificial intelligence, adaptive control, learning control and self-organizing systems from the point of view of engineering cybernetics. 递阶智能控制的形成 Hierarchical intelligent control is consists of three control levels and based on the principle of increasing precision with decreasing intelligence (IPDI), and the hybrid multi-layer intelligent control is based on knowledge description plus mathematical analysis. 三级递阶智能控制与IPDI原理中南大学 Central South University (CSU)52.1 General Theory of Hierarchical Intelligent Machines 递阶智能机器的一般结构 Different approaches of intelligent machine theories: Logical approach 逻辑法Described by Nilsson and Fikes and is still in research and development.Analytic approach 解析法More mature one both theoretically and experimentally.New methodologies and technologies 新方法Boltzmann machines, neural network and Petri nets etc. They have provided new tools for analytic formulation of the theory of intelligent machines.中南大学 Central South University (CSU)62.1.1 General Theory of Hierarchical Intelligent Machines2.1.1 General Structure 一般结构hierarchical intelligent control system is composed of three basic levels of control. The three interactive levels are shown in figure 2.1f Ecf c0Figure2.1 interactive structure of an intelligent machine 中南大学 Central South University (CSU)72.1.1 General StructureThe system is viewed as an entity of transforming a user command to a sequence of mechanical actions.本递阶智能控 制系统是一个整体,它把定性的用户指令变换为一个物理 操作序列。
The output of the system is realized via specific commands to a set of actuators.系统的输出是通过一组施加于驱动器上的具 体指令实现 Once the initial user command is received, the system will be brought into action depending on input information from a set of sensors interacted with the environment.一旦接收到初始用 户指令,系统就产生操作,操作是由一组与环境交互作用 的传感器的输入信息决定。
中南大学 Central South University (CSU)8The organization level 组织级代表控制系统主导思想,由人工智能起控制作用。
根据存 储在长期存储单元的本原数据集合,组织绝对动作、一般任务 和规则序列。
ujYFFigure 2.2 Block diagram of the organization level 中南大学 Central South University (CSU)9The organization level It serves as the generator of the rules of an inference engine by processing high levels of information for machine reasoning ,planning, decision making, learning (feedback) and memory operation. 组织级作为推理机的规则发生器,处理高层信息, 用于机器推理,规划,决策,学习和记忆。
中南大学 Central South University (CSU)10The coordination level 协调级 It acts by AI and OR. As an interface between the organization level and the execution level.Final plan Organization Level Coordination Leveldispatcher dispatcherMotion Motion Coordinator Coordinator11…Motion Motion Coordinator CoordinatornnVision Vision coordinator coordinatorForce Force coordinator coordinatorOther Other coordinator coordinatorMotion Motion Controller Controller11…Motion Motion Controller ControllernnVision Vision controller controllerForce Force controller controllerOther Other controler controlerExecution level中南大学 Central South University (CSU)11The coordination level The coordination level is composed of a specific number of coordinators of fixed structure, each performing specific functions.协调级由一定数量的具 有固定结构的协调器组成,每个协调器执行某些指 定的作用。
Communication between the coordinators is accomplished through a dispatcher which variable structure is dictated by the organizer as shown below. 各协调器间的通信由分配器来完成,而分配器的可 变结构是由组织级控制的。
中南大学 Central South University (CSU)12The execution level 执行级Acts by Cybernetics 对过程实现适当的控制作用 with high precision but low intelligence. Their performance measure can also be expressed as an entropy, thus unifying the function of the intelligent machine.H = − K ∑ Pi log Pii =1nH = − ∫ P( s ) log P( s )dsΩsH is called Shannon’s negative entropy and is a measure for uncertainty of information transmission. Ω s is the transmitted space of information signals.是被传递的信 号空间中南大学 Central South University (CSU)13精度随智能降低而提高的原理 (IPDI)The theory of intelligent controls may be postulated as the mathematical problem of finding the right sequence of decision and control for a system structured according to the principle of increasing precision with decreasing intelligence such that it minimizes its total entropy.智能控制理论被认定为寻求某个系统正确 决策与控制序列的数学问题,该系统在结构上 遵循精度随智能降低而提高的原理,所求序列 能够使系统的总熵最小。