非线性控制系统分析样本
- 格式:doc
- 大小:198.00 KB
- 文档页数:30
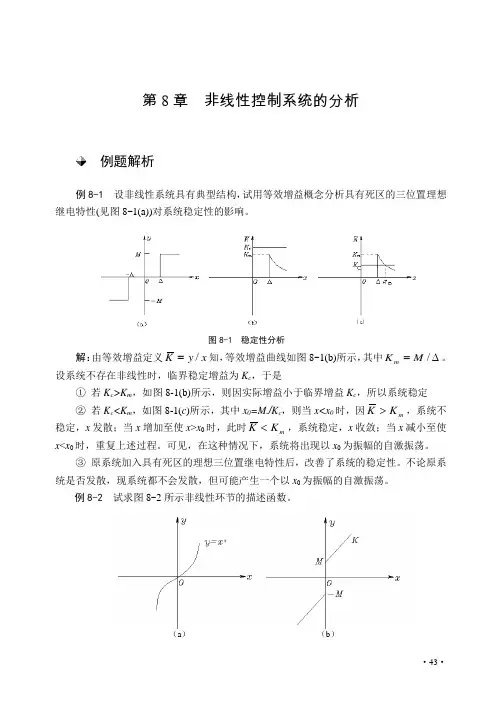
·43·第8章 非线性控制系统的分析例题解析例8-1 设非线性系统具有典型结构,试用等效增益概念分析具有死区的三位置理想继电特性(见图8-1(a))对系统稳定性的影响。
图8-1 稳定性分析解:由等效增益定义x y K /=知,等效增益曲线如图8-1(b)所示,其中∆=/M K m 。
设系统不存在非线性时,临界稳定增益为K c ,于是① 若K c >K m ,如图8-1(b)所示,则因实际增益小于临界增益K c ,所以系统稳定 ② 若K c <K m ,如图8-1(c )所示,其中x 0=M./K c ,则当x<x 0时,因m K K >,系统不稳定,x 发散;当x 增加至使x >x 0时,此时m K K <,系统稳定,x 收敛;当x 减小至使x <x 0时,重复上述过程。
可见,在这种情况下,系统将出现以x 0为振幅的自激振荡。
③ 原系统加入具有死区的理想三位置继电特性后,改善了系统的稳定性。
不论原系统是否发散,现系统都不会发散,但可能产生一个以x 0为振幅的自激振荡。
例8-2 试求图8-2所示非线性环节的描述函数。
(a ) (b )·44·图 8-2 非线性环节解:(1)对于图8-2(a ),因为t X x x y ωsin ,3==且单值奇对称,故A1=03204320432043sin 4sin 1sin 11X t td X t d t X t td y B ====⎰⎰⎰πππωωπωωπωωπ21143)(X X A j X B X N =+=图 8-3(2)对于图8-2(b ),因为图示非线性可以分解为图8-3所示两个环节并联,所以 K XMX N X N X N +=+=π4)()()(21 例8-3 试将图8-4(a ),(b )所示系统归化为一个非线性部分和一个线性部分串联的典型结构。
(a ) (b )图 8-4解:(1)G 1与G 2是小回路的负反馈,则2111G G G G +=从而得典型结构,见图8-5。

第八章 非线性控制系统分析8-1 非线性控制系统概述1. 研究非线性控制理论的意义以上各章详细地讨论了线性定常控制系统的分析和设计问题。
但实际上,理想的线性系统并不存在,因为组成控制系统的各元件的动态和静态特性都存在着不同程度的非线性。
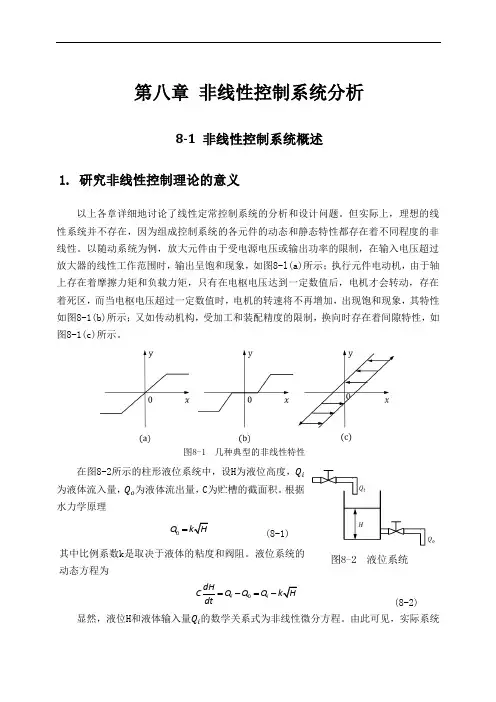
以随动系统为例,放大元件由于受电源电压或输出功率的限制,在输入电压超过放大器的线性工作范围时,输出呈饱和现象,如图8-l(a)所示;执行元件电动机,由于轴上存在着摩擦力矩和负载力矩,只有在电枢电压达到一定数值后,电机才会转动,存在着死区,而当电枢电压超过一定数值时,电机的转速将不再增加,出现饱和现象,其特性如图8-1(b)所示;又如传动机构,受加工和装配精度的限制,换向时存在着间隙特性,如图8-1(c)所示。
在图8-2所示的柱形液位系统中,设H 为液位高度,Q i为液体流入量,Q o 为液体流出量,C 为贮槽的截面积。
根据水力学原理0Q k H = (8-1)其中比例系数k 是取决于液体的粘度和阀阻。
液位系统的动态方程为0i i dH CQ Q Q k H dt =-=-显然,液位H 和液体输入量Q i 的数学关系式为非线性微分方程。
由此可见,实际系统中普遍存在非线性因素。
当系统中含有一个或多个具有非线性特性的元件时,该系统称为非线性系统。
一般地,非线性系统的数学模型可以表示为:(,,...,,)(,,...,,)n m n m d y dy d r dr f t y g t r dt dt dt dt =(8-3)其中f(·)和g(·)为非线性函数。
当非线性程度不严重时,例如不灵敏区较小、输入信号幅值较小、传动机构间隙不大时,可以忽略非线性特性的影响,从而可将非线性环节视为线性环节;当系统方程解析且工作在某一数值附近的较小范围内时,可运用小偏差法将非线性模型线性化。
例如,设图8—2液位系统的液位H 在H 0附近变化,相应的液体输入量Q i 在Q i0,附近变化时,可取ΔH =H −H 0,ΔQ i =Q i −Q i0,对√H 作泰勒级数展开。


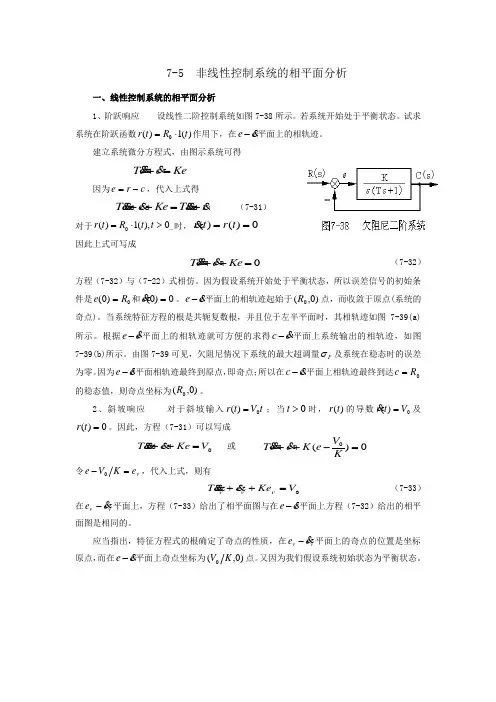
7-5 非线性控制系统的相平面分析一、线性控制系统的相平面分析1、阶跃响应 设线性二阶控制系统如图7-38所示。
若系统开始处于平衡状态。
试求系统在阶跃函数)(1)(0t R t r ⋅= 作用下,在ee -平面上的相轨迹。
建立系统微分方程式,由图示系统可得Ke c cT =+ 因为c r e -=,代入上式得r r T Ke e eT +=++ (7-31) 对于->⋅=0),(1)(0t t R t r 时,0)()(==t r t r因此上式可写成0=++Ke e e T (7-32)方程(7-32)与(7-22)式相仿。
因为假设系统开始处于平衡状态,所以误差信号的初始条件是0)0(R e =和0)0(=e。
e e -平面上的相轨迹起始于)0,(0R 点,而收敛于原点(系统的奇点)。
当系统特征方程的根是共轭复数根,并且位于左半平面时,其相轨迹如图7-39(a)所示。
根据ee -平面上的相轨迹就可方便的求得c c -平面上系统输出的相轨迹,如图7-39(b)所示。
由图7-39可见,欠阻尼情况下系统的最大超调量P σ及系统在稳态时的误差为零。
因为e e -平面相轨迹最终到原点,即奇点;所以在cc -平面上相轨迹最终到达0R c =的稳态值,则奇点坐标为)0,(0R 。
2、斜坡响应 对于斜坡输入t V t r 0)(=;当0>t 时,)(t r 的导数0)(V t r= 及0)(=t r 。
因此,方程(7-31)可以写成0V Ke e eT =++ 或 0)(0=-++KV e K e e T 令v e K V e =-0,代入上式,则有0V Ke ee T =++ννν (7-33) 在v v ee -平面上,方程(7-33)给出了相平面图与在e e -平面上方程(7-32)给出的相平面图是相同的。
应当指出,特征方程式的根确定了奇点的性质,在v v ee -平面上的奇点的位置是坐标原点,而在e e -平面上奇点坐标为)0,(0K V 点。
第八章非线性控制系统分析l、基本内容和要求(l)非线性系统的基本概念非线性系统的定义。
本质非线性和非本质非线性。
典型非线性特性。
非线性系统的特点。
两种分析非线性系统的方法——描述函数法和相平面法。
(2)谐波线性化与描述函数描述函数法是在一定条件下用频率特性分析非线性系统的一种近似方法。
谐波线性化的概念。
描述函数定义和求取方法。
描述函数法的适用条件。
(3)典型非线性特性的描述函数(4)用描述函数分析非线性系统非线性系统的一般结构。
借用奈氏判据的概念建立在奈氏图上判别非线性反馈系统稳定性的方法,非线性稳定的概念,稳定判据。
(5)相平面法的基本概念非线性系统的数学模型。
相平面法的概念和内容。
相轨迹的定义。
(6)绘制相轨迹的方法解析法求取相轨迹;作图法求取相轨迹。
(7)从相轨迹求取系统暂态响应相轨迹与暂态响应的关系,相轨迹上各点相应的时间求取方法。
(8)非线性系统的相平面分析以二阶系统为例说明相轨迹与系统性能间的关系,奇点和极限环的定义,它们与系统稳定性及响应的关系。
用相平面法分析非线性系统,非线性系统相轨迹的组成。
改变非线性特性的参量及线性部分的参量对系统稳定性的影响。
2、重点(l)非线性系统的特点(2)用描述函数和相轨迹分析非线性的性能,特别注重于非线性特性或线性部分对系统性能的影响。
8-1非线性控制系统分析1研究非线性控制理论的意义实际系统都具有程度不同的非线性特性,绝大多数系统在工作点附近,小范围工作时,都能作线性化处理。
应用线性系统控制理论,能够方便地分析和设计线性控制系统。
如果工作范围较大,或在工作点处不能线性化,系统为非线性系统。
线性系统控制理论不能很好地分析非线性系统。
因非线性特性千差万别,无统一普遍使用的处理方法。
非线性元件(环节):元件的输入输出不满足(比例+叠加)线性关系,而且在工作范围内不能作线性化处理(本质非线性)。
非线性系统:含有非线性环节的系统。
非线性系统的组成:本章讨论的非线性系统是,在控制回路中能够分为线性部分和非线性部分两部分串联的系统。
第8章 非线性控制系统的分析重点与难点一、基本概念1. 线性与非线性系统的联系与区别控制系统在不同程度上都存在着非线性。
有些系统可以在工作点附近把它线性化,然后按线性系统来处理(如三级管放大器电路),但当系统含有本征非线性特性(如死区特性、继电器特性等)时,就不能用线性化的方法处理。
死区特性将使系统出现较大的稳态误差。
饱和特性将降低系统的超调量,有时还会引起稳定振荡。
间隙特性可使系统的振荡加剧,静差也会增大,有时会使系统不稳定。
继电器特性会出现低速爬行、蠕动及响应不平滑等现象。
与线性系统相比,非线性系统与线性系统的本质差别可以概括为以下三点: (1)线性系统可以使用叠加原理,而非线性系统不能使用叠加原理;(2)线性系统的稳定性与初值、输入无关,而非线性系统的稳定性与初值、输入有关; (3)线性系统可以写出通解形式,而非线性系统无法写出通解形式。
2. 相平面分析法以x ,x为坐标的平面就叫相平面,系统的某一状态对应于相平面上的一点。
相平面上的点随时间变化的轨迹叫相轨迹。
对应于二阶线性定常系统的相轨迹,可以对非线性系统进行分析,这种分析方法称为相平面分析法。
二阶线性定常系统的相轨迹如表8-1所示。
3. 极限环非线性系统存在着稳定的振荡状态,在相平面图上可表示为一个孤立的封闭相轨迹。
所有附近的相轨迹都渐近地趋向这个封闭的相轨迹,或离开该封闭的相轨迹,该相轨迹称为极限环。
极限环分为稳定和不稳定等四种形式,如表8-2所示。
非线性系统可能没有极限环,也可能存在多个极限环。
在相平面图形上,一个稳定的极限环就对应于一个自振状态。
4. 相平面做图法I —等倾线法令dx xd a / =,即),(x x f a =。
对于a 的不同取值,由),(x x f a =可得到x 与x 的不同关系式,而且在曲线),(xx f a =上,均具有相同的斜率a 。
给出一组a ,就可近似描绘出相平面图形。
表8-1 二阶线性系统022的相轨迹表8-2 极限环基本形式5. 相平面做图法II —δ方法给),(x x f x=两边同加x 2ω,得令 x x x f x x22),(ωω+=+ 22),(),(ωωδx x xf xx +=得 22),(ωδωx x x x=+ 因此 21212)(d x x=-+⎪⎭⎫ ⎝⎛δω式中 21122121111)( ),(δωδδ-+==x x d xx 利用上式就可得点],[11xx 邻域内的相平面图形。
第八章非线性控制系统分析
教学目的 :
经过学习本章, 使学生掌握秒素函数法与相平面法分析非线性系统的理论基础与应用。
教学要求:
(1)认识非线性系统区别于线性系统的运动过程特点.
(2)掌握描述函数法和相平面法的特点及应用范围.
(3)明确函数的定义及相关概念,熟悉典型非线性的妙描述和负倒描述函数
特性,掌握用描述函数法分析非线性系统的稳定性和分析自振,计算自振参数的方法.
教学课时: 12学时
教学重点: (1) 非线性的相关概念.
(2) 典型系统的相平面表示.
(3) 典型非线性系统的描述函数形式.
教学难点:
非线性系统的描述函数求法;
利用负倒数法分析系统稳定性.
本章学时: 12学时
主要内容:
8.1 非线性系统的概述
8.2 描述函数法
8.3 相平面法分析线性控制系统
8.4 利用非线性特性改进系统的控制性能
8.1非线性系统的概述
8.1.1 非线性模型
㈠组成
---------x-------非线性环节---------线性环节------------
组成: 非线性环节+线性环节
㈡. 分类
①从输入输出关系上分: 单值非线性
非单值非线性
1,从形状特性上分: 饱和
死区
回环
继电器
㈢特点
稳定性与结构, 初始条件有关 ; 响应
㈣分析方法
注意: 不能用叠加原理
1. 非线性常微分方程没有同意的求解方法, 只有同意求近似解的方法:
a. 稳定性( 时域, 频域) : 由李亚普洛夫第二法和波波夫法判断
b. 时域响应: 相平面法( 实际限于二阶非线性系统) 较精确, 因高阶作用
太复杂
描述函数法: 近似性, 高阶系统也很方便
研究非线性系统并不需求得其时域响应的精确解, 而重要关心其时域响应的性质, 如: 稳定性, 自激震荡等问题, 决定它的稳定性范围, 自激震荡的条件, 震荡幅度与频率等。
2,死区继电器: f(e)
+m
-△e
3
4.滞环特性( 间隙)
-m
8.2 描述性函数
X0(S)
一描述性函数的定义
非线形元件的输入为正弦波时, 将起输出的非正弦波的一次谐波( 基波) 与输入正弦波的复数比, 定义为给非线形环节的描述性函数。
输入:
输出: ) y=f(Asinwt)
=y0+∑x(t)=Asinwt (Bksinkwt+Ckcoskwt)
假设输出为对称奇函数, y0=0;只取基波分量( 假设具有低通滤波特性, 高次谐波忽略) , 则y(t)=B1sinwt+C1coswt=y(sinwt+¢)
二典型非线形特性的描述函数
1,计算方法设非线形特性为: y=f(x)
令X=Asinwt,则y(t)由富式级数展开为: Y(t)=Ao+∑(Ancosnwt+Bnsinnwt)
=Ao+∑Ynsin(nwt+¢)
式中: An=
Ao=0,谐波线性略去高次谐波, 只取基波, 具有低如果非线性特性是中心对称的, 则y(t)具有奇次对称性,
通滤波特性。
Y1=A1coswt+B1sinwt=Y1sin(wt+¢1)
N(A)=Y1/A×exp(j¢1)=Y1/Acos¢1+jY1/Asin¢1
=B1/A+jA1/A=b(A)+ja(A)
与频率材料比较, 方式形式类似, 相当于用一个等效线性元件代替原来非线性元件, 而等效线性元件幅相特性N(a)是输入信号A的函数。
2.举例求饱和限幅特性的描述函数( 固有非线性)
Y y
X ωt
A1=1/π∫y(t)coswtd(wt)=0
B1=1/π∫y(t)sinwtd(wt)=2/π∫y(t)sinwtd(wt)
= 2/π(∫y(t)sinwtd(wt)+∫y(t)sinwtd(wt)+∫y(t)sinwtd(wt))
若A>0,y(t)=Kasinwt 0<=wt<a
kc=B a<=wt<=
Kasinwt
比较线性系统特征方程 G(jω)=–1
线性系统, ( –1, j0) 点是判断稳定的关键点。
非线性系统, 判断稳定性不是点( –1, j0) ,而是一条线–1∕N。
( A∕d) 。
由线形部分与描述函数负侧特性之间相对位置能够判断非线性系统的稳定及自激振荡, 即可利用奈奎斯稳定判据进行分析。
3.判据内容:
在开环幅相平面上, G(jω)条件, 最小位相, 无右极点。
1) 若K。
G(jω)轨迹不包围时线性负侧特性–1∕N。
( A∕d) ,则此非线性系统稳定。
2) 若K。
G(jω)轨迹包围–1∕N。
( A∕d) , 则非线性系统不稳定。
3) 若K。
G(jω)与–1∕N。
( A∕d) 相交, 则在交点处, 系统处于临界稳定, 可能产生周期持续震荡, 这种持续震荡能够用正弦振荡来近似, 其振荡的振幅和频率能够分别用交点处
–1∕N。
( A∕d) 轨迹上的A 值K。
G(jω)曲线上对应的ω值来表征。
工程设计中, 一般在线性部分加入校正, 改变K。
G(jω)与–1∕N。
( A∕d) 的相对位置, 以消除持续振荡, 提高系统稳定性。
例2.判定自振点并求自振参数。
解: 理想继电器的描述函数
N(A)=4B ∕лA (B=π∕2) N(A)=2∕A
–1∕N 。
( A ∕d) =–A ∕2 K 。
— 非线性环节的传递函数( K 。
=1)
K G(jw) K 。
G(j ω)与–1∕N 。
( A ∕d) 两曲线交于M 点, 稳定自振点。
交点坐标由K 。
G(j ω)=–1∕N 。
( A ∕d) 亦可求出。
10 ∕j ω( j ω+1) ( j ω+3) =10∕–ωω+ j ω( 3-ωω) = -A ∕2 虚部=0 j ω( 3-ωω) =0 因此ω=0 ( 舍去) ω=1.732
实部≠0 ω=1.732 代入原式 -10∕4ωω=-A ∕2 A=1.7
故自振点ω=1.732∕s A=5∕3
稳定运行区为初始值大于5∕3 →∞
大初始值能稳定 小初始值不能稳定
例 Y /2。