静力学习题课.
- 格式:ppt
- 大小:1.70 MB
- 文档页数:22
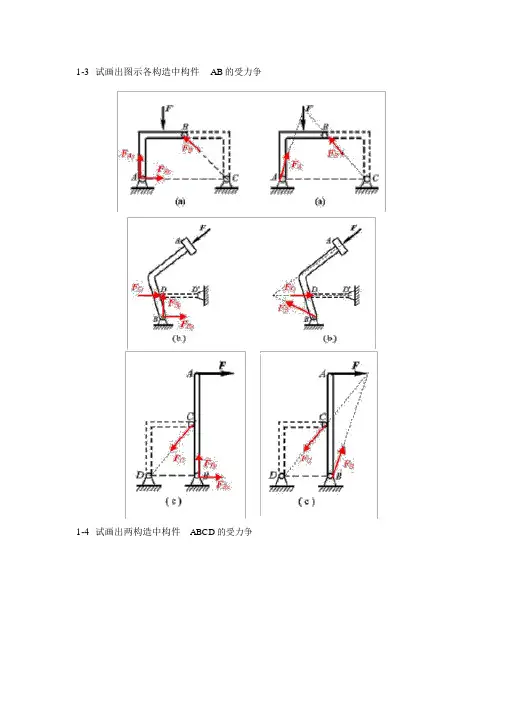
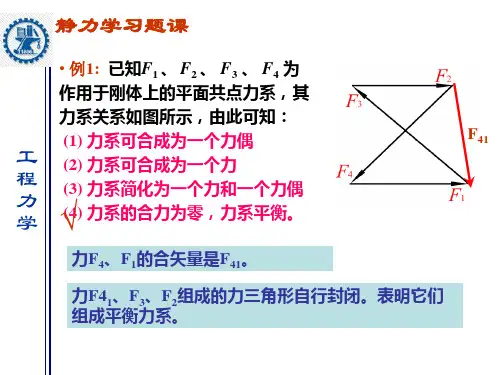
1-3 试画出图示各构造中构件AB的受力争1-4 试画出两构造中构件ABCD的受力争1-5 试画出图 a 和 b 所示刚系统整体各个构件的受力争1-5a1-5b1- 8 在四连杆机构的ABCD的铰链 B 和 C上分别作用有力F1和 F2,机构在图示位置均衡。
试求二力F1和 F2之间的关系。
解:杆 AB,BC, CD为二力杆,受力方向分别沿着各杆端点连线的方向。
解法 1( 分析法 )假定各杆受压,分别选用销钉 B 和 C 为研究对象,受力以下图:yyFBCC xB Fo45BCx30o o F60F2CDF AB F1由共点力系均衡方程,对 B 点有:F x0F2F BC cos4500对 C点有:F x0FBC F1 cos3000解以上二个方程可得:F12 6F2 1.63F23解法 2( 几何法 )分别选用销钉 B 和 C 为研究对象,依据汇交力系均衡条件,作用在 B 和C 点上的力构成关闭的力多边形,以下图。
F F2BCF AB o30o45CD60oFF BC F1对 B 点由几何关系可知:F2F BC cos450对 C 点由几何关系可知:F BC F1 cos300解以上两式可得:F1 1.63F22-3 在图示构造中,二曲杆重不计,曲杆AB 上作用有主动力偶 M。
试求 A 和 C 点处的拘束力。
解: BC为二力杆 ( 受力以下图 ) ,故曲杆 AB 在 B 点处遇到拘束力的方向沿BC 两点连线的方向。
曲杆AB遇到主动力偶M的作用, A 点和 B 点处的拘束力一定构成一个力偶才能使曲杆AB保持均衡。
AB受力以下图,由力偶系作用下刚体的均衡方程有(设力偶逆时针为正):M0 F A10a sin(450 )M 0F A0.354Ma此中:tan 1。
对 BC杆有:F C FB F A0.354M 3aA,C两点拘束力的方向以下图。
2-4解:机构中 AB杆为二力杆,点A,B 出的拘束力方向即可确立。
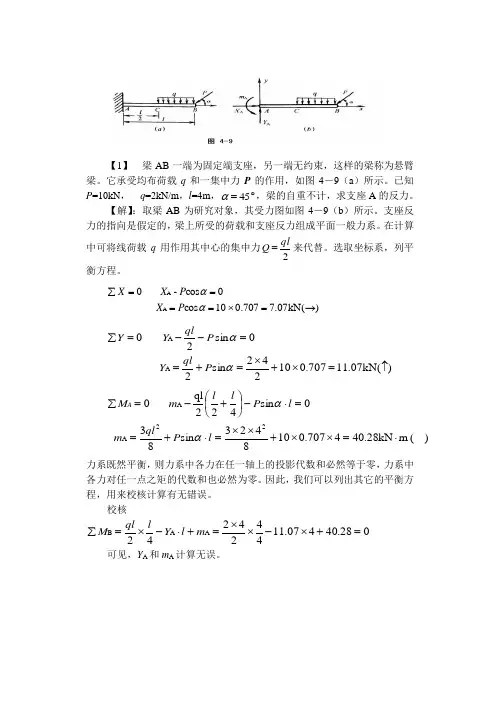
【1】 梁AB 一端为固定端支座,另一端无约束,这样的梁称为悬臂梁。
它承受均布荷载q 和一集中力P 的作用,如图4-9(a )所示。
已知P =10kN , q =2kN/m ,l =4m ,︒=45α,梁的自重不计,求支座A 的反力。
【解】:取梁AB 为研究对象,其受力图如图4-9(b )所示。
支座反力的指向是假定的,梁上所受的荷载和支座反力组成平面一般力系。
在计算中可将线荷载q 用作用其中心的集中力2qlQ =来代替。
选取坐标系,列平衡方程。
)(kN 07.7707.010cos 0cos - 0A A →=⨯====∑ααP X P X X)(kN 07.11707.010242sin 2 0sin 2 0A A ↑=⨯+⨯=+==--=∑ααP ql Y P qlY Y )( m kN 28.404707.0108423sin 83 0sin 422ql 022A A ⋅=⨯⨯+⨯⨯=⋅+==⋅-⎪⎭⎫⎝⎛+-=∑l P ql m l P l l m M A αα力系既然平衡,则力系中各力在任一轴上的投影代数和必然等于零,力系中各力对任一点之矩的代数和也必然为零。
因此,我们可以列出其它的平衡方程,用来校核计算有无错误。
校核028.40407.114424242A A B =+⨯-⨯⨯=+⋅-⨯=∑m l Y l ql M 可见,Y A 和m A 计算无误。
【2】 钢筋混凝土刚架,所受荷载及支承情况如图4-12(a )所示。
已知kN 20 m,kN 2 kN,10 kN/m,4=⋅===Q m P q ,试求支座处的反力。
【解】:取刚架为研究对象,画其受力图如图4-12(b )所示,图中各支座反力指向都是假设的。
本题有一个力偶荷载,由于力偶在任一轴上投影为零,故写投影方程时不必考虑力偶,由于力偶对平面内任一点的矩都等于力偶矩,故写力矩方程时,可直接将力偶矩m 列入。
设坐标系如图4-12(b )所示,列三个平衡方程)(kN 3446106 06 0A A ←-=⨯--=--==++=∑q P X q P X X)(kN 296418220310461834 036346 0B B A ↑=⨯++⨯+⨯=+++==⨯--⨯-⨯-⨯=∑q m Q P Y q m Q P Y M)(kN 92920 00B A B A ↓-=-=-==-+=∑Y Q Y Q Y Y Y校核3462203102)9(6)34(6363266 C=⨯⨯+-⨯+⨯+-⨯--⨯=⨯+-++-=∑qmQPYXMAA说明计算无误。


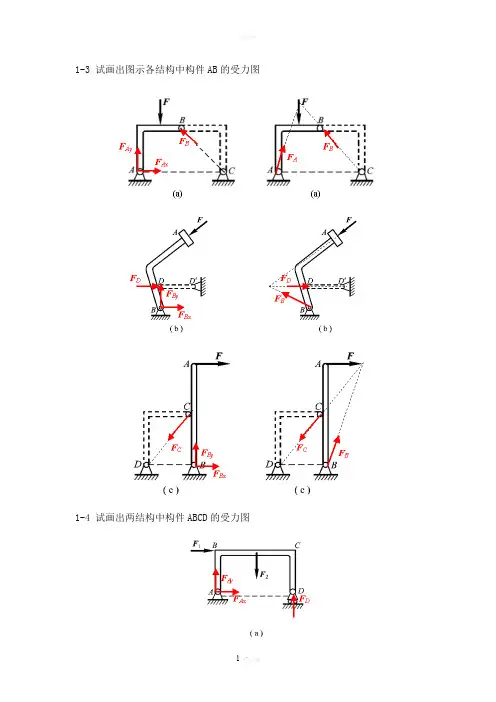
1-3 试画出图示各结构中构件AB的受力图1-4 试画出两结构中构件ABCD的受力图1-5 试画出图a和b所示刚体系整体各个构件的受力图1-5a1-5b1- 8在四连杆机构的ABCD 的铰链B 和C 上分别作用有力F 1和F 2,机构在图示位置平衡。
试求二力F 1和F 2之间的关系。
解:杆AB ,BC ,CD 为二力杆,受力方向分别沿着各杆端点连线的方向。
解法1(解析法)假设各杆受压,分别选取销钉B 和C 为研究对象,受力如图所示:由共点力系平衡方程,对B 点有:∑=0x F 045cos 02=-BC F F对C 点有:∑=0x F 030cos 01=-F F BC解以上二个方程可得:22163.1362F F F ==解法2(几何法)分别选取销钉B 和C 为研究对象,根据汇交力系平衡条件,作用在B 和C 点上的力构成封闭的力多边形,如图所示。
对B 点由几何关系可知:0245cos BC F F = 对C 点由几何关系可知: 0130cos F F BC =解以上两式可得:2163.1F F =2-3 在图示结构中,二曲杆重不计,曲杆AB 上作用有主动力偶M 。
试求A 和C 点处的约束力。
解:BC 为二力杆(受力如图所示),故曲杆AB 在B 点处受到约束力的方向沿BC 两点连线的方向。
曲杆AB 受到主动力偶M 的作用,A 点和B 点处的约束力必须构成一个力偶才能使曲杆AB 保持平衡。
AB 受力如图所示,由力偶系作用下刚体的平衡方程有(设力偶逆时针为正):0=∑M 0)45sin(100=-+⋅⋅M a F A θ aM F A 354.0=其中:31tan =θ。
对BC 杆有:aM F F F A B C 354.0=== A ,C 两点约束力的方向如图所示。
2-4FF解:机构中AB杆为二力杆,点A,B出的约束力方向即可确定。
由力偶系作用下刚体的平衡条件,点O,C处的约束力方向也可确定,各杆的受力如图所示。
1-3试画出图示各结构中构件AB的受力图1-4试画出两结构中构件ABCD勺受力图1-5试画出图a和b所示刚体系整体各个构件的受力图1-5a1-5b1- 8在四连杆机构的ABCD勺铰链B和C上分别作用有力F i和F2,机构在图示位置平衡。
试求二力F1和F2之间的关系。
解:杆AB BC CD为二力杆,受力方向分别沿着各杆端点连线的方向。
解法1(解析法)假设各杆受压,分别选取销钉B和C为研究对象,受力如图所示:由共点力系平衡方程,对B点有:F x 0 F2F BC COS45°0对C点有:F x 0 F BC F1COS300 0解以上二个方程可得:F12 6F 1.63F2解法2(几何法)分别选取销钉B和C为研究对象,根据汇交力系平衡条件,作用在B和C点上的力构成封闭的力多边形,如图所示。
对B点由几何关系可知:F2F BC COS450对C点由几何关系可知:F BC F1 COS300解以上两式可得:F1 1.63F22-3在图示结构中,二曲杆重不计,曲杆AB上作用有主动力偶M试求A和C 点处的约束力。
解:BC为二力杆(受力如图所示),故曲杆AB在B点处受到约束力的方向沿BC 两点连线的方向。
曲杆AB受到主动力偶M的作用,A点和B点处的约束力必须构成一个力偶才能使曲杆AB保持平衡。
AB受力如图所示,由力偶系作用下刚体的平衡方程有(设力偶逆时针为正):M 0 F A 10a sin(450) M 0 F A 0.354M其中:tan -。
对BC杆有:F C F B F A 0.354M3 aA,C两点约束力的方向如图所示。
2-4解:机构中AB 杆为二力杆,点A,B 出的约束力方向即可确定。
由力偶系作用下 刚体的平衡条件,点 0,C 处的约束力方向也可确定,各杆的受力如图所示。
对1313 -6aFFi FjF 2 FiF 3- F i - —Fj2 222F RFi3Fj M A■-3 Fak F R M A V3 d a F R2Fi24d3 a F X 0 PsinFB X0 F y 0 F By P P cos0 F X 04F A X F B X 0F y 0F AyF By0 M A 0 MA F Byl 0求解以上三式可得:M 1 3N m , F ABF OF C 5N ,方向如图所示Psi nAF BxF AxBC 杆有:M 0对AB 杆有: F B F AF B BC sin300 M 2对OA 杆有:M 0 M i F AOA 0F By , MFA X,FAy, FBX, M A 0 N D aG -cos F l coscos2F y 0 N D cosG F 0N D ,arccosf 2(F (2FG)a 卡G)l ]F Ay F By P(1 COS ) M A P(1 cos )1M y O p eta n F BC cos c F BC sin eta n 0 F BC60.6N 2M x' 0 P 1 aF B c F BC S in2a 0 F B100N F y 0 F Z0F Ay,F A;z M x 0 M DE 0 F2COS4500 F20 M AO 0 F6COS45° a F COS450 COS450 a 0 F6 2 F M BH 02F4COS450 a F6COS450 a 0 F4 2F M AD 02F1 a F6COS450 a F sin450 a 0 £ 1 2 F M CD 02F1 a F3 a F sin45°a 0 F3 1F M BC 02F x 0F3 a F5 a F4COS450 a 0 F50 M 1500N cm Fy 0M O0以下几题可看一看!FA , F NA , FB , F NB ,tan3( f sif s2)FNB 0ta n 6002aM cf s2f si2 3F By 2a 0 F ByM H 0 F D y a Fa 0 F Dy FM BF DX a F 2a 0 F DX2FF y 0F AyF DyF By 0F AyF M A0 FD X a FB X 2aFB XFM BF AX 2aFD Xa0 FA XFM c 0 F D bF XF D-F M A0 F B bF XbF i F 2 (F i2Mpcos45° psin45° F 2)DF N 2 N iF i F 2f s N i f s N 2F i ,N i ,F 2,N 2, f s:s 2p D F e f 2M0 f siF By0.223, f s2 4.49 FB x N iP(i _f s2) _2( i —f ;2)f s%.223450F xF yM AT cosAC sinF N T sinF s T cos pT sin AC cosAB . sin 2FN , F s , T, fsf s 0.646a l . a几F NB a Pcos-Psi n 022 3F NA a P cos-Psin a 小 —— 02 2、3 F AF BPsi nM A 0M B 0 F x 0F A F Bf si F NAS 2F NBS24.49 i2MF D )b F ACAyD 2MF (bF 2x)F B F I F AAa b F A F 3 FxAy F i F 3 cos450F 1M2qa F yF 2aF2 Z M r ( 2qa) F x 0 FAXF 3 cos45(F AX(MaaF AyF 2 F 3si n450 P 4qa 0F AyP 4qa M A F 2 a P 2a 4qa 2a F 3S in450 '3aMM A 24qa 2 Pa M M A0 F By 2a F2a 0 F ByF Ay 2a F 2a 0 F A 『FF x 0 F AXFBx FF 32qa) F 0 F EF2 M C 0 F Bx a F By aV 2(MF AX2q x a) a F E sin450 a 0 F BxM eM BF By FF NDF 3 sin450F yM AM B0F BXM AN 13r P 3rcos60020 N i 6.93(N)F xFA XN 1 sin 60°F AX 6(N) F y 0F AyN 1cos600P 0 F Ay 12.5'(N) FN 1cos300 Tcos300 6.93(N)M A F N 2Lsin2P -cos2 M BF N LsinP Lcos F s Lcos2F S P F SFNtan100 F RC ,F RD F RC , F RD F RC , F RD2 2M A 0 F ND aI 0F ND44M A0F NC a F l 0F NC -FF NDaM O 0 F SC R F SD R 0FNCF X 0sinF — ----------- F----- FS D NCN D1 cos 1 cossin 1 costan —, f SD tanFRC,F2 221 cosF RCSDF NDF SD 0tan — 2 I FaFla cos —2PF RCsi n[180°(1800 2,sin ] ftanFl sinISD (Pa Fl )(1 cos )F yF NDP F SC sin F ND PFl ( (cosasin tan —)2f SD tanFl sin(Pa Fl )(1 cos )F B F ACFBF AC tan1 F3(F ND P) R MDF B \M E (P F NE )1RtanF NDM D M E!FRM DF NDBPL FaM AM EF yF x 4 f sP 4f sP } f s ,1 3f s }F SC%F X0 F NC costa nFl sin (Pa Fl )(1 cos )F NCsinF SC cos F SD 0FNDFSDM E 1FFNE F NE F SD tan2FNDF min{ —P,」 P,R R 3 1 F SD F NE F SE F 02P R M DF SE RF SD 3FFSDf s F ND M FM GF SE;FF SE f s F NEF max 0.362.该系统的位置可通过杆OA 与水平方向的夹角B 完全确定,有一个自由度。