数值最优化方法
- 格式:ppt
- 大小:5.25 MB
- 文档页数:124
最优化算法分析及应用最优化算法是一类用于求解最优问题的数学模型和算法。
最优问题是指在一定约束条件下,寻求使得目标函数取得最大或者最小值的问题。
最优化算法包括解析法和数值法两种方法。
解析法是通过对目标函数进行数学分析,利用导数、求极限等数学工具,从而找到最优解的一类算法。
其中最常用的方法是求解目标函数的一阶或者二阶偏导数,通过解方程求得目标函数的稳定点或是极值点,从而得到最优解。
解析法的优点是可以得到精确的最优解,其中最著名的算法是拉格朗日乘数法、KKT条件和牛顿法等。
这些方法在多种领域有着广泛的应用,比如经济学中的效用函数最大化问题、工程学中的最优设计问题等。
数值法是通过迭代计算的方式逼近最优解的一类算法。
与解析法不同,数值法不需要对目标函数进行精确的数学分析,而是通过给定初始点,通过一定规则进行迭代计算,从而逐步逼近最优解。
数值法的优点是可以处理复杂的非线性问题,也可以应用于高维问题或者没有解析解的问题。
常用的数值法有梯度下降法、共轭梯度法、模拟退火算法等等。
这些方法在机器学习、数据挖掘、图像处理等领域都有广泛的应用,比如利用梯度下降法进行参数优化,利用模拟退火算法求解旅行商问题等。
最优化算法在现实生活中有很多应用。
在工程领域,最优化算法被广泛应用于优化设计问题,比如在汽车工业中,通过最优化算法可以实现车辆的轻量化设计,从而降低燃料消耗和排放。
在物流领域,最优化算法可以帮助货物合理分配,提高物流效率,降低物流成本。
在电力系统中,最优化算法可以用于电力调度问题,从而实时调整发电机组的出力,保证电网的供需平衡。
在经济学中,最优化算法可以用来解决资源配置和决策问题,比如最大化收益、最小化成本等。
此外,最优化算法还可以应用于交通流量优化、医疗资源优化、网络传输优化等各个领域。
通过合理选择和应用最优化算法,可以提高效率,降低成本,优化资源配置,从而实现经济可持续发展和社会效益最大化。
总而言之,最优化算法是一类用于求解最优问题的数学模型和算法。
数值优化算法在现代科学和工程中,数值优化算法被广泛应用于解决各种复杂问题。
数值优化算法是一种寻找函数极值的方法,这些函数可能具有多个自变量和约束条件。
数值优化算法对于在实际问题中找到最佳解决方案至关重要。
本文将介绍几种常见的数值优化算法及其应用。
一、梯度下降法梯度下降法是一种常用的数值优化方法。
它通过寻找损失函数的梯度来更新参数,以在每次迭代中逐步接近极值点。
梯度下降法的优势在于简单易实现,并且在大规模数据集上的表现良好。
这使得它成为许多机器学习算法中参数优化的首选方法。
二、牛顿法牛顿法是一种用于寻找函数极值点的迭代优化算法。
它利用函数的一阶导数和二阶导数信息来逼近极值点。
与梯度下降法相比,牛顿法的收敛速度更快,但它的计算复杂度更高。
牛顿法在求解高维问题或拟合复杂曲线时表现出色。
三、遗传算法遗传算法是一种模拟生物遗传和进化过程的优化算法。
它通过使用选择、交叉和变异等操作,模拟自然界的进化规律,来寻找函数的最优解。
遗传算法适用于复杂问题,能够在搜索空间中找到全局最优解。
在函数不可导或离散问题中,遗传算法能够提供有效的解决方案。
四、模拟退火算法模拟退火算法是一种启发式搜索算法,模拟了金属退火过程中原子随温度变化的行为。
模拟退火算法以一定的概率接受更差的解,并以较低的概率逐渐收敛到全局最优解。
模拟退火算法对局部极小点有一定的免疫能力,并且在大规模离散优化问题中表现出优越性。
五、粒子群算法粒子群算法是一种基于群体行为的优化算法。
它模拟了鸟群觅食的行为,通过迭代寻找问题的最优解。
粒子群算法通过评估适应度函数来引导粒子的移动,从而逐渐靠近最优解。
这种算法适用于多目标优化问题和高维函数优化。
结论数值优化算法在科学和工程领域扮演着至关重要的角色。
梯度下降法、牛顿法、遗传算法、模拟退火算法和粒子群算法是几种常见的数值优化方法。
它们各自具有不同的优势和适用范围,可以根据问题的特点选择合适的优化算法。
通过应用这些优化算法,可以帮助科学家和工程师在实际问题中找到最佳解决方案,推动技术的进步和创新。
数值最优化方法范文数值最优化是一种重要的数学方法,用于寻找函数最小值或最大值的数值解。
在实际问题中,很多情况下无法通过解析的方式求得最优解,此时数值最优化方法的应用就显得尤为重要。
本文将从优化问题的定义、数值最优化方法的分类及原理、优化算法的选择、数值最优化应用实例等方面进行详细介绍。
首先,我们来定义什么是优化问题。
优化问题可以理解为在一定约束条件下,求解函数的最小值或最大值。
数值最优化的目标是通过计算机算法求得这个最优解。
常见的优化问题包括线性规划、非线性规划、整数规划等。
接下来,我们来介绍一些常见的数值最优化方法。
数值最优化方法可以分为两类:无约束优化和有约束优化。
无约束优化是指没有约束条件,可以直接对函数进行优化;有约束优化是指在优化过程中需要满足一定的约束条件。
在无约束优化中,最简单的方法是算法,如穷举法和枚举法。
这些方法的缺点是计算量大,效率低。
更高效的无约束优化方法包括梯度下降法、牛顿法和拟牛顿法等。
梯度下降法是一种基于函数梯度的迭代算法,可以找到函数的局部最小值。
牛顿法和拟牛顿法则基于函数的二阶导数信息进行迭代计算,可以更快地逼近最优解。
这些方法的选择通常需要考虑函数是否可微、计算速度、收敛性等因素。
在有约束优化中,常用的方法包括线性规划法和非线性规划法。
线性规划法是一种求解线性约束下的最优解的方法,基于线性规划问题的性质可以通过简单的迭代计算求解。
非线性规划法则是一种求解非线性约束下的最优解的方法,如KKT条件、罚函数法等。
这些方法的选择通常需要考虑约束条件的性质、计算复杂度等因素。
在选择数值最优化算法时,应根据实际问题的特点进行选择。
一般而言,梯度法是一种通用的最优化算法,适用于大部分优化问题。
对于非光滑问题,拟牛顿法是一种较好的选择。
而牛顿法则适用于具有二阶导数信息的优化问题。
此外,随机优化方法如遗传算法、粒子群算法等也是值得考虑的选择。
最后,我们来看一下数值最优化方法在实际问题中的应用实例。
迭代法和牛顿迭代法的优缺点及应用在数值计算和算法设计中,迭代法和牛顿迭代法是两种常见的数值优化方法。
它们可以很好地用于解决非线性方程组、最优化问题以及数学模型的求解等问题。
在实际应用中,它们的优缺点各有不同,可根据问题的特点选择适合的方法。
本文将对迭代法和牛顿迭代法的优缺点及应用进行分析。
一、迭代法1、迭代法的原理迭代法是一种通过不断逼近目标值的方法。
其思想是将一个原问题转化为一个递归求解的过程。
假设我们要求解一个方程f(x) = 0,可以利用如下公式进行迭代:$x_{n+1} = g(x_n)$其中,$g(x_n)$是一个递推公式,用来表示如何从$x_n$ 得到$x_{n+1}$。
通过不断迭代,可以逐渐逼近解。
当迭代次数足够多时,可以得到符合精度的解。
2、迭代法的优点(1)实现简单:迭代法的计算过程非常简单,只需要考虑递推公式即可。
(2)收敛速度较快:迭代法的收敛速度要比其他方法要快,尤其是在某些非线性问题中,迭代法表现出了其优异的收敛性。
(3)适用范围广:迭代法可以用于解决各种类型的数学问题,包括求解非线性方程组、求解最优化问题以及求解微积分方程等。
3、迭代法的缺点(1)收敛不稳定:由于迭代法只是通过不断逼近目标值的过程,收敛的速度和稳定性都受到了影响,可能存在发散的情况。
(2)初值选择的影响:迭代法在求解问题时,对于初值的选择需要非常慎重,因为不同的初值会得到不同的收敛结果。
(3)依赖递推公式:迭代法需要依赖于递推公式,当递推公式难以求解或者导数难以计算时,迭代法的效果可能会受到影响。
二、牛顿迭代法1、牛顿迭代法的原理牛顿迭代法是一种利用函数的一阶导数和二阶导数来逼近根的方法。
对于一个非线性方程f(x)=0,设其在$x_0$处的导数不为0,则可以用如下公式进行迭代:$x_{n+1} = x_n −\frac {f(x_n)}{f′(x_n)}$其中$f'(x_n)$是$f(x_n)$的一阶导数。

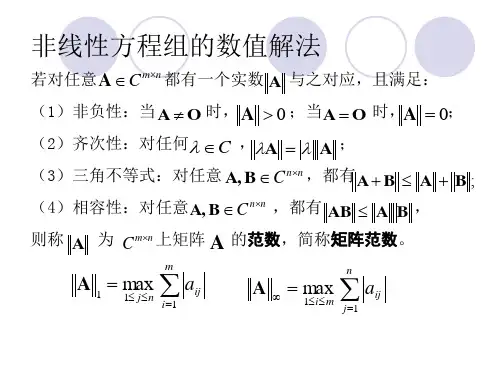
第1章 非线性最小二乘法与数值最优化变量之间的关系更多地表现为非线性特征。
线性模型作为基础模型是非线性的近似,即任何非线性模型都可以通过线性模型来近似表达。
比如,模型01x y e u ββ=++通过泰勒级数展开表述为0000100101**01|()x x x x x y e x x ue x e x u x uβββββββ=≈+-+ =-++ =++模型201y x u ββ=++的线性近似表达式为0010201010**01(2)|()22x x y x x x ux x x ux uβββββββ=≈+-+ =-++ =++例 1.1 利用Monte Carlo 模拟的方法观察线性模型对非线性模型的近似。
设DGP 为:y=10+0.2*exp(x)+u ,x 为[1,3]区间的均匀分布。
利用线性模型与指数模型分别回归模型,并计算x 对y 的(平均)边际影响与(平均)弹性。
(数据文件:nonlin )但线性模型对非线性模型的近似程度取决于高阶部分是否充分小。
即使在样本内线性模型能够较好地拟合数据,也不能准确地体现变量的结构关系。
非线性模型中,x 对y 的边际影响(或弹性)是变化的;而线性模型中,x 对y 的边际影响(或弹性)是常数。
很多情况下,线性模型与非线性模型对边际影响或弹性的估计存在非常大的差异。
另外,利用线性模型拟合非线性数据存在潜在的危险,即区间外预测会存在越来越大的误差。
因此,正确设定模型的形式是进行准确推断和预测的重要环节。
对于一般的回归模型,如以下形式的模型,(,)f =+y X βu 1.1OLS 一般不能得到其解析解。
比如,运用OLS 方法估计模型(1.1),令S(β)表示残差平方和,即 2211()[(;)]n nii i i i S u y f ====-∑∑βX β 1.2 最小化S(β),即根据一阶条件可以得到1(;)()2[(;)]n i i i i f S y f =∂∂=--=∂∂∑X ββX β0ββ 以模型y x u γαβ=++为例,其一阶条件为20110()1[]02i nx i i S y e ββββ=∂=---=∂∑β220111()1[]02i i nx x i i S y e e βββββ=∂=---=∂∑β 2201212()1[]02i i nx x i i i S y e x e ββββββ=∂=---=∂∑β 上述方程组没有解析解,需要一般的最优化方法。
数值最优化方法数值最优化是指让数学模型的解达到最理想值或最优值的算法。
它主要用于在给定某种限制条件下求出最佳解,在现代数学和工程应用中被广泛使用,从而使解决问题者能够获得理想的解。
数值最优化方法可分为三类:随机搜索方法、梯度搜索方法及类模式搜索方法。
一、随机搜索方法随机搜索方法是一类基于随机过程的搜索算法,它的基本思路是用随机的方式搜索一定数量的可能的解,从而找出满足最佳化要求的最优解。
随机搜索方法不需要借助任何假定,它们可以用来解决各种类型的最优化问题,可以在没有充分知识的情况下构造模型。
随机搜索方法主要有模拟退火算法、JS散乱算法、粒子群算法(PSO)、贝叶斯优化算法、遗传算法、定时算法等。
模拟退火算法是一类基于热力学的随机搜索方法,它的基本思想是模拟热力学中的凝固过程,模拟加热和冷却的过程,最终可以将系统放入最终的冷却态,即最优化解。
该算法的基础原理非常简单,可以应用于各种复杂的问题,但是收敛较慢,耗时较长,算法的收敛强度难以控制。
JS散乱算法是一类以满足斯坦福大学计算机科学系终身教授John H. Conway及其相近的两个博士生Richard K. Guy和Brennen McHenry于1965年提出的算法。
该算法是一类基于局部搜索策略的随机搜索算法,算法的核心思想是组合局部搜索算法和比较算法,即在最优解附近搜索一个满足最优解的解,让其达到最优解,它的优点是时间复杂度低且可以收敛到局部最小点,但是劣势是实际收敛非常缓慢,而且难以控制局部最优解。
粒子群算法是一类基于社会行为学的随机搜索算法,该算法由Kennedy和Eberhart于1995年提出,其基本思想是模拟鸟群觅食行为,即让粒子的搜索行为类似于一群鸟群搜索食物的行为,从而找到最优解。
粒子群算法的优点是可以找到最优解,计算量较少,并且可以用来解决非凸问题,但缺点是可能在某局部范围内收敛,而且难以控制全局搜索空间大小。
贝叶斯优化算法是一类基于贝叶斯学派优化研究的算法,该算法旨在利用 Bayes式通过将优化目标模型转化为条件概率分布,并采用适当的抽样策略搜索最优解。
数学中的优化理论与最优化方法优化理论是数学中的重要分支,在不同领域中都有广泛的应用。
本文将介绍数学中的优化理论以及一些常用的最优化方法。
一、优化理论的基本概念1.1 优化问题优化问题是指在一定的约束条件下,寻找使某个目标函数取得最优值的问题。
通常有两种类型的优化问题:极大化问题和极小化问题。
极大化问题是要找到使目标函数取得最大值的自变量取值,而极小化问题则是要找到使目标函数取得最小值的自变量取值。
1.2 目标函数和约束条件在优化问题中,目标函数是要优化的对象,通常用f(x)表示,其中x表示自变量。
约束条件是目标函数的取值范围或限制条件,用g(x)表示。
优化问题可以表示为如下形式:max/min f(x)s.t. g(x) <= 01.3 最优解最优解是指在所有满足约束条件的自变量取值中,使得目标函数取得最大值或最小值的解。
最优解可能存在唯一解,也可能存在多个解。
二、常用的最优化方法2.1 梯度下降法梯度下降法是一种基于搜索的最优化方法,通过迭代的方式不断调整自变量的取值来逼近最优解。
该方法的核心思想是沿着目标函数的负梯度方向进行搜索,使目标函数逐渐减小,直到达到最小值。
2.2 牛顿法牛顿法是一种迭代求解方程的方法,也可以用于解决优化问题。
该方法基于泰勒级数展开,通过求解目标函数的一阶导数和二阶导数来更新自变量的取值,以逼近最优解。
2.3 线性规划线性规划是一种常用的优化方法,适用于目标函数和约束条件都是线性的情况。
线性规划可以通过线性规划模型进行建模,然后利用线性规划算法求解最优解。
2.4 非线性规划非线性规划是一种更一般性的优化方法,适用于目标函数或约束条件存在非线性关系的情况。
非线性规划可以通过梯度下降法、牛顿法等方法进行求解,也可以利用非线性规划算法进行求解。
2.5 整数规划整数规划是一类特殊的优化问题,要求自变量取值必须为整数。
整数规划有时候可以通过线性规划进行求解,但通常需要借助专门的整数规划算法来求解。
数值最优化方法范文数值最优化方法是一种数学与计算机科学领域的方法,用于求解数学模型中的最优解问题。
在实际生活和工程实践中,我们经常遇到需要优化一些目标函数的问题,如最小化成本、最大化收益、最短路径等。
数值最优化方法通过对目标函数进行迭代计算,逐步调整解的取值,来寻找最优解。
1. 梯度下降法(Gradient Descent)梯度下降法是一种常用的数值优化方法,用于求解无约束优化问题。
该方法基于目标函数的梯度信息(导数),通过迭代的方式朝着梯度的反方向走,来逐步接近最优解。
梯度下降法的思想简单直观,并且易于实现。
然而,该方法有时可能会陷入局部最优解。
2. 牛顿法(Newton's Method)牛顿法是解决无约束优化问题的一种经典方法。
通过利用目标函数的二阶导数信息,牛顿法可以更快地接近最优解。
然而,由于需要计算目标函数的二阶导数,牛顿法的计算量较大,并且可能不稳定。
3. 共轭梯度法(Conjugate Gradient)共轭梯度法是一种用于解决无约束优化问题的迭代法。
该方法利用目标函数的梯度信息,并通过一定的算法求解一组共轭方向,从而快速找到最优解。
相较于梯度下降法和牛顿法,共轭梯度法具有更快的收敛速度。
然而,该方法要求目标函数是二次函数,并且对于一般的非线性问题效果可能不佳。
4. 割平面法(Cutting Plane Method)割平面法是一种广泛应用于线性规划问题的优化方法。
该方法通过逐步添加与可行解集合之间差距最大的约束,来逼近最优解。
割平面法可以用于求解具有任意精度要求的线性规划问题,并且在实践中取得了较好的效果。
5. 遗传算法(Genetic Algorithm)遗传算法是一种模拟生物进化过程的优化算法。
该方法通过种群的遗传操作(交叉、变异、选择等),来逐代最优解。
遗传算法能够应对复杂的优化问题,并且不需要目标函数的连续性和可导性。
然而,由于遗传算法是一种随机方法,存在效率低、收敛性差等问题。
1、Armijo线搜索算法function f=fun_obj(x)f=100*(x(2)-x(1)^2)^2+(1-x(1))^2;function g=fun_grad(x)g=[2*x(1)-400*x(1)*(-x(1)^2+x(2))-2,-200*x(1)^2+200*x(2)];% 用armijo搜索确定步长,其中xk是当前迭代点,rho,sigma为armijo参数,gk为当前下降方向function mk=armijo(xk,rho,sigma,gk )%assert(rho>0&&rho<1); % 限制Armijo参数rho在(0,1)之间%assert(sigma>0&&sigma<0.5); % 限制Armijo参数sigma在(0,0.5)之间mk=0;max_mk=100; % 最大迭代次数while mk<=max_mkx=xk+rho^mk*gk; % 求解x(k+1)iffeval('fun_obj',x)<=feval('fun_obj',xk)-sigma*rho^mk*(fun_grad(xk))*g k' %终止条件break;endmk=mk+1; % 更新迭代end% 用负梯度方向作为搜索方向,用armijo线搜索确定步长,求解 min f(x) 的最优解function [xk,fk,k]=armijomain(x0)max_iter=5000; % 最大迭代次数EPS=1e-6; % 精度rho=1;sigma=1e-4; % Armijo参数k=0;xk=x0; % 初值while k<max_iter %迭代次数超过最大迭代次数时跳出循环k=k+1;dk=fun_grad(xk); % x(k)处的梯度d=-1*dk; % x(k)处的下降方向if norm(dk)<EPS % 迭代停止的条件break;endmk=armijo(xk,rho,sigma,d); % 用armijo线搜索确定步长rxk=xk+rho^mk*d; % 更新迭代,计算x(k+1)fk=fun_obj(xk); % 计算x(k+1)处的函数值endx0=[1.2,1.2];[xk,fk,k]=armijomain(x0)2、Wolfe-Powell搜索算法function f=fun_obj(x)f=100*(x(2)-x(1)^2)^2+(1-x(1))^2;function g=fun_grad(x)g=[2*x(1)-400*x(1)*(-x(1)^2+x(2))-2,-200*x(1)^2+200*x(2)];function alpha=wolfe(x0,d0)% Wolfe-Powell stepalpha=1;pho=1/2;sigma=0.251;sigma1=0.4;itermax=100;d=d0;% Forward.for i=1:itermaxx1=x0+alpha*d;f1=fun_obj(x1);f0=fun_obj(x0);df=fun_grad(x0)'*d;if f1-f0>sigma*alpha*dfalpha=pho*alpha;elsebreakendend% Backward.for i=0:itermaxx1=x0+alpha*d;df1=fun_grad(x1)'*d;if df1<sigma1*dfbeta=alpha/pho;che=1;for j=1:itermaxx1=x0+alpha*d;f1=fun_obj(x1);f0=fun_obj(x0);if f1-f0>sigma*alpha*dfche=che*pho;alpha=alpha+che*(beta-alpha);elsebreakendendelsebreak;endendfunction [xk,fk,k]=wolfemain(x0)max_iter=5000; % 最大迭代次数EPS=1e-6; % 精度rho=1e-4;sigma=0.9; % Wolfe-Powell参数k=0;xk=x0; % 初值while k<max_iterk=k+1;dk=fun_grad(xk); % xk处的梯度d=-1*dk; % xk处的搜索方向if norm(dk)<EPS % 迭代停止条件break;endalpha=wolfe_powell(xk,rho,sigma,dk,d); % Wolfe_Powell搜索求步长r xk=xk+alpha*d; % 更新迭代,计算x(k+1)fk=fun_obj(xk); % 计算x(k+1)处的函数值endx0=[1.2,1.2];[xk,fk,k]=wolfemain(x0)3、二分法function f=fun_obj(x)f=100*(x(2)-x(1)^2)^2+(1-x(1))^2;function g=fun_grad(x)g=[2*x(1)-400*x(1)*(-x(1)^2+x(2))-2,-200*x(1)^2+200*x(2)];function f=fai_grad(x,d)syms abr;fun=100*(b-a^2)^2+(1-a)^2;a=x(1)+r*d(1);b=x(2)+r*d(2);fund=4*a^2+b^2; % 函数f(x+r*d)关于r的二次函数,令为funf=diff(fund); % 求fun函数的一阶导数function r=bisection(f,tol)a=-10;b=10; %给定初始区间fa=subs(f,a); %求在a点处的函数值fb=subs(f,b); %求在b点处的函数值if sign(fa)*sign(fb)>=0 %判断区间的端点值是否异号error('f(a)f(b)<0 not satisfied!') %如果同号,则输出错误提示,重新给定初始区间endwhile (b-a)/2>tol % 若(b-a)/2<=tol,则跳出循环,得到最优解c=(a+b)/2; % 取搜索区间的中值,令为cfc=subs(f,c); % 求在c点处的函数值if fc==0 % 若f(c)==0,c是函数的一个根breakendif fa*fc<0 % 若a,c函数值的乘积小于0,重新定义搜索区间为[a,c] b=c;fb=subs(f,b);else% 若a,c函数值的乘积大于0,重新定义搜索区间为[c,d]a=c;fa=subs(f,a);endendr=(a+b)/2; % 最终区间的中值就是函数的零点% 用负梯度方向作为搜索方向,用二分法确定步长,求解 min f(x) 的最优解function [xk,fk,k]=bisemain(x0)max_iter=5000; % 最大迭代次数EPS=1e-6; % 精度k=0;xk=x0; % 初值while k<max_iter %迭代次数超过最大迭代次数时跳出循环k=k+1;dk=fun_grad(xk); % x(k)处的梯度d=-1*dk; % x(k)处的下降方向if norm(dk)<EPS % 迭代停止的条件break;end%% 用线搜索二分法确定步长rf=fai_grad(xk,d); % 求解f(xk+r*d)关于r的二次函数的导数minr=bisection(f,EPS); % 利用二分法求f=0的零点,即f(xk+r*d)的最小值点minrxk=xk+minr*d; % 更新迭代,计算x(k+1)fk=fun_obj(xk); % 计算x(k+1)处的函数值endx0=[1.2,1.2];[xk,fk,k]=bisemain(x0)4、黄金分割法function f=fun_obj(x)f=100*(x(2)-x(1)^2)^2+(1-x(1))^2;function g=fun_grad(x)g=[2*x(1)-400*x(1)*(-x(1)^2+x(2))-2,-200*x(1)^2+200*x(2)];function f=fai(x,d)syms abcer;fun=100*(b-a^2)^2+(1-a)^2;a=x(1)+r*d(1);b=x(2)+r*d(2);c=x(3)+r*d(3);e=x(4)+r*d(4);f=100*(b-a^2)^2+(1-a)^2;function [x_opt] = goldenOpt(f,e)r=0.618; % 黄金分割系数a=-10;b=10; % 初始区间u=b-r*(b-a); % 测试点u的值fu=subs(f,u); % 测试点u的函数值值v=a+r*(b-a); % 测试点v的值fv=subs(f,v); % 测试点v的函数值值k=1;while abs(b-a)>e % 迭代停止条件k=k+1; % 更新迭代%% 若u的函数值大于v的函数值,重新定义搜索区间为[u,b]if fu>fva=u; % 将测试点u的值赋给区间端点au=v; % 将测试点v的值赋给ufu=fv; % 将v的函数值赋给uv=a+r*(b-a); % 重新计算测试点v的值fv=subs(f,v); % 重新计算v的函数值%% 若u的函数值等于v的函数值,重新定义搜索区间为[u,v]elseif fu==fva=u; % 将测试点u的值赋给区间端点ab=v; % 将测试点v的值赋给区间端点bv=a+r*(b-a); % 重新计算测试点v的值fv=subs(f,v); % 重新计算v的函数值u=b-r*(b-a); % 重新计算测试点u的值fu=subs(f,u); % 重新计算u的函数值%% 若u的函数值大于v的函数值,重新定义搜索区间为[a,v]elseb=v; % 将测试点v的值赋给区间端点bv=u; % 将测试点u的值赋给vfv=fu; % 将u的函数值赋给vu=b-r*(b-a); % 重新计算测试点u的值fu=subs(f,u); % 重新计算u的函数值endendx_opt=(a+b)/2; % 最终区间的中值就是函数的最优解function [xk,fk,k]=goldenmain(x0)max_iter=5000; % 最大迭代次数EPS=1e-6; % 精度k=0;xk=x0; % 初值while k<max_iterk=k+1;dk=fun_grad(xk); % xk处的梯度d=-1*dk; % xk处的下降方向if norm(dk)<EPS % 迭代停止的条件break;endf=fai(xk,d); % f(xk+r*d)的关于r的二阶表达式 minr=goldenOpt(f,EPS); % 黄金分割法求步长rxk=xk+minr*d; % 更新迭代xkfk=fun_obj(xk); % 计算xk处的函数值endx0=[1.2,1.2];[xk,fk,k]=goldenmain(x0)。
数学中的最优化问题求解方法随着科技的迅速发展,人们对于各种事物的需求也越来越高。
而大多数时候,我们是希望达到“最优化”的状态,即在一定条件下,尽可能地取得最大收益或最小成本。
因此,在现实生活中,最优化问题思维逐渐成为人们解决问题的重要方法之一。
而在数学领域,最优化问题同样具有重要作用。
本文将从最优化问题基本概念、最优化建模和求解方法三方面,介绍最优化问题的相关知识。
一、最优化问题基本概念最优化问题,即指在满足一定约束条件下,求出某些目标(如最大值或最小值)最优的解。
最优化问题的基本形式为:$\max_{x\in S} f(x)\qquad$或$\qquad\min_{x\in S} f(x)$其中,$f(x)$为目标函数,$x$为变量,$S$为变量的约束条件。
在最优化问题中,“最大值”和“最小值”藏在目标函数里。
目标函数中哪个变量每增加1,函数数值改变的最大值或最小值就被称为局部最优解或全局最优解。
因此,最优化问题的关键在于如何确定最优解,这便需要我们对其建模和求解。
二、最优化建模最优化问题的关键在于合理建立问题模型。
根据问题特性,我们可以将其分为线性规划、非线性规划、整数规划、混合整数规划、多目标规划等不同类型。
2.1 线性规划线性规划问题是指目标函数和约束条件均为线性函数的最优化问题。
线性规划模型最为简单,但覆盖了许多实际应用的情况。
其基本形式为:$\max_{x\in\Re^n}c^Tx\qquad s.t.\qquad Ax\leq b,x\geq0$其中,向量$c$, $b$和矩阵$A$均为已知的常数,$x$为待求的向量。
在式子中,第一行为目标函数,第二行代表约束条件。
由于目标函数和约束条件均为线性函数,因此这是典型的线性规划问题。
2.2 非线性规划非线性规划问题是指其中一个或多个约束条件或目标函数为非线性函数的最优化问题。
非线性规划比线性规划更为广泛,因此变量取值空间、目标函数和约束条件也更灵活多样。
最优化方法综述范文最优化方法是一类用于解决数学模型中最优化问题的数值计算方法。
最优化问题是在给定约束条件下,寻找使得目标函数值最小或最大的变量取值。
最优化方法广泛应用于各个领域,如工程、经济学、物理学、统计学等,解决了很多实际问题。
无约束优化问题是指目标函数的最小化或最大化问题,没有约束条件限制变量的取值范围。
无约束优化方法主要包括:直接法、区间收缩法、梯度下降法、共轭梯度法、牛顿法、拟牛顿法等。
直接法是一种经典的无约束优化方法,其基本思想是在空间中找到使目标函数值下降的方向,并在该方向上更新变量以接近最优解。
直接法简单易用,但效率较低,特别是对于高维问题。
区间收缩法通过收缩范围逐步接近最优解,属于一种全局优化方法。
该方法通过不断缩小范围的方式,在有限次迭代内找到目标函数的最小值。
梯度下降法是一种常见的无约束优化方法,利用目标函数的梯度信息来更新变量,使得目标函数的值不断减小。
梯度下降法有多种变体,如批量梯度下降法、随机梯度下降法和小批量梯度下降法等。
共轭梯度法是一种迭代法,用于解决线性方程组或无约束优化问题。
该方法利用向量的共轭性质,通过一系列迭代步骤逼近最优解。
共轭梯度法通常在求解大规模问题时具有较好的性能。
牛顿法是一种基于二阶导数(Hessian矩阵)的优化方法,它通过利用目标函数的二阶导数信息来更新变量。
牛顿法在目标函数为凸函数且Hessian矩阵正定时能够快速收敛,但在非凸函数或Hessian矩阵不正定时可能出现发散。
拟牛顿法是一类对牛顿法的改进方法,通过近似计算目标函数的Hessian矩阵来避免直接计算和求逆大规模Hessian矩阵的困难。
常见的拟牛顿法有DFP算法、BFGS算法等。
约束优化问题是在给定约束条件下,寻找满足约束条件的使目标函数取得最小值或最大值的变量取值。
约束优化方法主要包括等式约束优化和不等式约束优化。
等式约束优化问题是指目标函数的最小化或最大化问题,满足一定的约束条件,可以通过约束优化方法求解。
数值优化算法数值优化算法是一类用于寻找最优解的方法,它在工程、经济和科学领域中发挥着重要作用。
这些算法的目标是通过迭代搜索来优化目标函数的数值值,以满足特定的约束条件。
数值优化算法可以帮助我们在真实世界的复杂问题中找到最佳解决方案,并对决策和设计过程提供指导。
数值优化算法可以分为两大类:确定性算法和随机算法。
确定性算法通过一系列数学公式和求导法则,在每一步中寻找目标函数梯度的最佳方向。
常用的确定性算法包括梯度下降法、拟牛顿法和共轭梯度法。
梯度下降法通过迭代的方式逐步减小目标函数的值,拟牛顿法通过近似目标函数的海森矩阵来加速收敛,而共轭梯度法则结合了两者的优势。
这些算法在求解凸优化问题和非线性优化问题中具有广泛的应用。
随机算法是另一类数值优化算法,它通过引入概率的元素来求解问题。
随机算法的优势在于可以避免陷入局部最优解,并具有更好的全局搜索能力。
其中最著名的随机算法是遗传算法和蚁群算法。
遗传算法模拟生物进化过程,通过选择、交叉和变异等操作来搜索最优解。
蚁群算法则模拟了蚁群寻找食物的行为,通过信息素的传递和更新来引导搜索过程。
这些算法在组合优化、多目标优化和机器学习等领域有广泛应用。
数值优化算法是解决实际问题的重要工具。
它们可以用于工程设计中的参数调优、经济学中的效益最大化、物理学中的模型拟合等诸多领域。
在工程设计中,数值优化算法可以帮助工程师在设计过程中找到最佳的参数配置,以提高性能和降低成本。
在经济学中,数值优化算法可以帮助决策者制定最优的决策策略,以实现经济效益的最大化。
在物理学中,数值优化算法可以通过拟合观测数据来估计模型的参数值,以更好地解释实验现象。
然而,在实际应用中,数值优化算法也面临一些挑战。
首先,目标函数往往是复杂的、高维的,这导致搜索空间巨大,算法难以找到全局最优解。
其次,优化问题常常存在多个目标函数和约束条件,因此需要设计合适的多目标优化算法来解决。
此外,数值优化算法对初始解的选择和参数的设定敏感,不同的选择可能导致不同的结果。