四象限运行变频调速性能测试系统
- 格式:pdf
- 大小:803.61 KB
- 文档页数:3
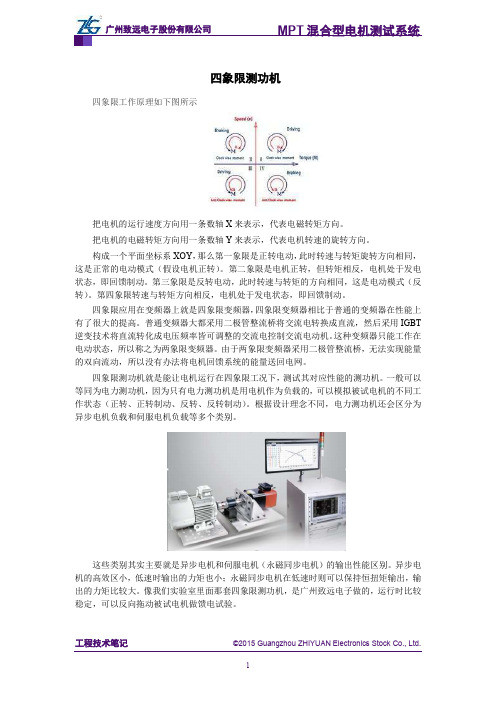
工程技术笔记 ©2015 Guangzhou ZHIYUAN Electronics Stock Co., Ltd.1 四象限测功机四象限工作原理如下图所示把电机的运行速度方向用一条数轴X 来表示,代表电磁转矩方向。
把电机的电磁转矩方向用一条数轴Y 来表示,代表电机转速的旋转方向。
构成一个平面坐标系XOY,那么第一象限是正转电动,此时转速与转矩旋转方向相同,这是正常的电动模式(假设电机正转)。
第二象限是电机正转,但转矩相反,电机处于发电状态,即回馈制动。
第三象限是反转电动,此时转速与转矩的方向相同,这是电动模式(反转)。
第四象限转速与转矩方向相反,电机处于发电状态,即回馈制动。
四象限应用在变频器上就是四象限变频器,四象限变频器相比于普通的变频器在性能上有了很大的提高。
普通变频器大都采用二极管整流桥将交流电转换成直流,然后采用IGBT 逆变技术将直流转化成电压频率皆可调整的交流电控制交流电动机。
这种变频器只能工作在电动状态,所以称之为两象限变频器。
由于两象限变频器采用二极管整流桥,无法实现能量的双向流动,所以没有办法将电机回馈系统的能量送回电网。
四象限测功机就是能让电机运行在四象限工况下,测试其对应性能的测功机。
一般可以等同为电力测功机,因为只有电力测功机是用电机作为负载的,可以模拟被试电机的不同工作状态(正转、正转制动、反转、反转制动)。
根据设计理念不同,电力测功机还会区分为异步电机负载和伺服电机负载等多个类别。
这些类别其实主要就是异步电机和伺服电机(永磁同步电机)的输出性能区别。
异步电机的高效区小,低速时输出的力矩也小;永磁同步电机在低速时则可以保持恒扭矩输出,输出的力矩比较大。
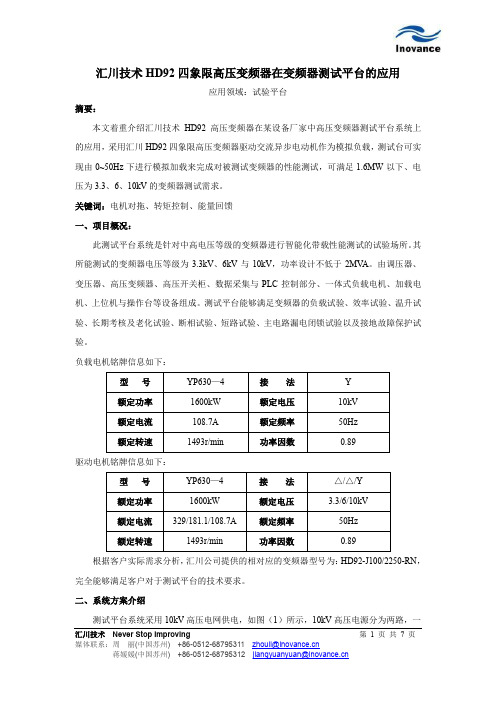
像我们实验室里面那套四象限测功机,是广州致远电子做的,运行时比较稳定,可以反向拖动被试电机做馈电试验。

汇川技术HD92四象限高压变频器在变频器测试平台的应用应用领域:试验平台摘要:本文着重介绍汇川技术HD92高压变频器在某设备厂家中高压变频器测试平台系统上的应用,采用汇川HD92四象限高压变频器驱动交流异步电动机作为模拟负载,测试台可实现由0~50Hz下进行模拟加载来完成对被测试变频器的性能测试,可满足1.6MW以下、电压为3.3、6、10kV的变频器测试需求。
关键词:电机对拖、转矩控制、能量回馈一、项目概况:此测试平台系统是针对中高电压等级的变频器进行智能化带载性能测试的试验场所。
其所能测试的变频器电压等级为3.3kV、6kV与10kV,功率设计不低于2MV A。
由调压器、变压器、高压变频器、高压开关柜、数据采集与PLC控制部分、一体式负载电机、加载电机、上位机与操作台等设备组成。
测试平台能够满足变频器的负载试验、效率试验、温升试验、长期考核及老化试验、断相试验、短路试验、主电路漏电闭锁试验以及接地故障保护试验。
负载电机铭牌信息如下:驱动电机铭牌信息如下:根据客户实际需求分析,汇川公司提供的相对应的变频器型号为:HD92-J100/2250-RN,完全能够满足客户对于测试平台的技术要求。
二、系统方案介绍测试平台系统采用10kV高压电网供电,如图(1)所示,10kV高压电源分为两路,一汇川技术Never Stop Improving第1 页共7 页汇川技术 Never Stop Improving 第 2 页 共 7 页路直接给四象限变频器供电,另一路直接接到调压变压器,变压器可输出3.3、6、10kV 三个等级电压,给被测试变频器供电。
被测试变频器输出经过开关柜接到电机M1(电机M1为3.3、6、10kV 三电压等级电机),拖动电机M1与加载电机M2之间经过联轴器联接。
图(1):测试平台方案示意图图(2):对拖试验机组当被测变频器拖动M1电动机旋转时,M2电动机的转子也同时旋转,此时启动汇川HD92四象限变频器时,则会在M2电动机定子侧的三相绕组中通入励磁电流,产生磁场。

四象限斩波控制直流调速系统的仿真四象限斩波控制直流调速系统是一种常见的电机调速控制方法,通过控制电机的电压和电流来实现对电机转速的精确控制。
下面是一个详细的四象限斩波控制直流调速系统的仿真步骤:1. 确定系统参数:首先,需要确定直流电机的参数,包括电机的电感、电阻、转矩常数等。
同时,还需要确定控制系统的参数,包括采样周期、控制器的增益等。
2. 建立数学模型:根据直流电机的特性和控制策略,建立数学模型。
一般来说,可以使用电机的电动方程和电压方程建立数学模型。
3. 设计控制器:根据系统的数学模型,设计合适的控制器。
常见的控制器包括比例控制器、积分控制器和微分控制器等。
根据具体需求,可以选择不同的控制器结构。
4. 进行仿真:使用仿真软件(如MATLAB/Simulink)搭建直流调速系统的仿真模型。
在模型中,将控制器和电机模型进行连接,并设置合适的输入信号。
5. 设置初始条件:为了进行仿真,需要设置合适的初始条件。
这包括电机的初始转速、电流以及控制器的初始状态。
6. 运行仿真:开始仿真运行,并观察系统的响应。
可以通过监测电机的转速、电流以及控制器的输出等参数来评估系统的性能。
7. 优化控制器:根据仿真结果,可以对控制器进行调整和优化。
可以通过改变控制器的参数或者结构来提高系统的性能。
8. 分析结果:根据仿真结果,分析系统的性能。
可以评估系统的稳定性、响应速度和抗干扰能力等指标。
通过以上步骤,可以完成四象限斩波控制直流调速系统的仿真。
在实际应用中,可以根据仿真结果进行实际系统的设计和调试。

四象限变频调速在工业生产中,电机系统的控制和调速是十分重要的。
传统的电机驱动系统往往采用电阻调压、变频调速等方式,而四象限变频调速技术正是一种效率更高、响应更快的电机调速方法。
一、什么是四象限变频调速四象限变频调速是一种电机调速控制方法,可以实现正转、反转、减速、加速等功能。
这种调速方法可以让电机在四个象限内任意运动,极大地提高了电机的控制精度和灵活性。
二、四象限变频调速的原理四象限变频调速通过改变电机的频率和电压来控制电机的转速和扭矩。
其原理是通过变频器改变输入电压和频率,调整电机的转速。
通过反馈控制系统实时监测电机的运行状态,使得电机可以在任意速度下平稳运行。
三、四象限变频调速的优势1.高效节能:通过提高电机效率和减小功耗,节能效果显著。
2.运行稳定:调速精度高,可以保证电机在各种工况下稳定运行。
3.响应迅速:电机可以快速响应控制指令,加速和减速迅速。
4.可实现自动化控制:结合PLC、仪表等控制器,可以实现电机的自动化控制。
5.减小电机损耗:通过降低电机运行过程中的损耗,延长电机寿命。
四、四象限变频调速的应用四象限变频调速技术在各个领域均有广泛的应用,主要包括以下几个方面:1.工业生产:在食品加工、化工生产、机械加工等行业中,电机调速是必不可少的。
2.电梯和输送设备:电梯、输送机等场合中,四象限变频调速可以实现平稳运行、高效运输。
3.空调系统:通过变频调速技术可以实现空调系统的节能运行,提高空调系统的效率。
4.风电、水泵等领域:风电、水泵等需要根据外部条件调整转速的设备,也可以采用四象限变频调速实现。
五、结语四象限变频调速技术作为电机调速领域的一种创新技术,具有较高的应用价值和实用性。
通过合理的调速控制,可以提高电机的效率、稳定性和寿命,为工业生产和生活带来便利和效益。

我们旳系统优势变频器采用美国ABB企业、日本富士和西门子企业旳高端工业产品。
ABB在业界是交流变频旳领跑者, 产品广泛用于全球高层大型直通电梯, 矿山主副井提高等安全规定严格旳场所。
变频器都配置专业提高控制器单元, 配合原厂提高宏, 具有刹车模块控制器, 大量用于高层大型直通电梯, 工业罐笼提高, 煤矿主副井, 斜巷轨道绞车等安全规定严格旳场所。
PLC控制单元采用德国西门子S7系列CPU, 该CPU旳性能和稳定性在国际上受到很高旳评价。
整套系统构造合理, 采用原则工业现场总线, 符合国际原则, 可随时并入全矿旳无人值守自动化生产系统。
设计为双CPU备份, 一台出现故障, 可以自动切换到此外备用PLC 上, 变频失效自动切换到手动模式, 电源自动切换, 做到保险系数双备份, 大大提高安全系数。
本产品集现代化计算机技术、防爆技术、变频技术和热管散热技术为一体旳高科技产品, 尤其是四象限型变频器, 具有世界先进旳技术水平, 当提高机重物下方时, 可将电动机发电能量返馈回电网, 提高了下方操作安全性旳同步节省了大量电能。
目录1 您旳新选择-绞车变频调整控制系统 (3)2 可依赖旳技术 (4)3 系统构成 (5)4 系统旳长处 (9)5 使用特点 (11)6 工作原理 (16)7 先进旳电机控制方式 (18)8 我们更先进旳 (20)9 我们旳服务 (21)10 设备清单 (24)煤矿井下防爆运送绞车肩负着运送人员、材料和矸石旳任务, 是煤矿生产旳重要设备。
目前国内普遍采用旳调速措施是采用在电动机转子回路内接入金属电阻, 用鼓形控制器逐段切除电阻来到达调速旳目旳。
电阻调速控制装置旳缺陷有: 隔爆电阻箱能耗大, 散热难以处理, 且占用了极大旳峒室旳面积, 增长了开拓费用;电阻调速属有级调速, 开环控制, 调速范围小, 精度低, 安全性能差;在减速和下放时, 需投切动力制动直流电源或低频电源, 易导致设备损坏, 且挥霍了大量旳电能;此外, 原有旳控制系统保护不够齐全, 安全可靠性差。
变频调速的四象限运行张燕宾1 异步电动机的机械特性1.1 概述电力拖动系统就是电动机带动生产机械运动(大多数为旋转运动)的系统。
进一步说,则是电动机的电磁转矩克服了生产机械的阻转矩,把生产机械带动到一定转速的运行系统。
如图1所示,拖动系统主要由三大部分构成:图1 电力拖动系统的构成(1) 电动机是把电能转换成机械能的装置。
在拖动系统里,起原动机的作用。
(2) 生产机械是拖动系统的工作对象,如鼓风机、水泵、起重机械、机床等。
也是电动机的负载。
(3) 传动机构是把电动机输出的机械能传递给生产机械的装置。
在大多数情况下是一种减速装置,有时也能在一定范围内进行调速。
常见的传动机构如皮带、齿轮、联轴器等。
拖动系统的主要物理量是:(1) 转速n拖动系统的基本工况是由电动机带动生产机械以一定的速度运行。
因此,转速n是拖动系统的工作目的。
本文中,电动机输出轴上的转速用n M表示;生产机械输入轴上的转速用n L表示。
(2) 转矩T对于电动机,这是拖动系统得以转动的原因,是原动力。
由于电动机的转矩是由电流和磁场相互作用而产生的,故称为电磁转矩,用T M表示。
描绘转速n与转矩T之间的关系n=ƒ(T)是至关重要的,称之为机械特性。
在异步电动机内,电磁转矩的大小与电流和磁通量的乘积成正比:T M=K T I1Ф1cosö2 (1) 式中,K T为转矩常数;I1为定子电流;Ф1为每个磁极的磁通量;cosö2为转子电流的功率因数。
作为拖动生产机械的原动转矩,应该是电动机轴上的输出转矩。
是电磁转矩克服了电动机内部的磨擦损失和通风损失的结果。
但由于磨擦损失和通风损失都很小,为了简化分析的过程,常粗略地把异步电动机的电磁转矩直接看作是电动机轴上的输出转矩。
1.2 自然机械特性与速度变化电动机在没有人为地改变其参数时的机械特性,称为自然机械特性。
异步电动机的自然机械特性如图2所示。
其主要特征可由三个点来描述:图2 异步电动机的自然机械特性(1) 理想空载点(N0点)电动机输出轴上的转矩为0(T=0),称为理想空载。
《自动化仪表》第29卷第2期 2008年2月基于双DSP 的四象限变频调速系统设计与实现D e s ign and I m p lem e n t a ti o n o f Fo u r 2quad ran t Va riab le Fre que ncy D rivi ng Sys temB a sed o n D ua l D SP s卢文生(黑龙江科技学院电气与信息工程学院,黑龙江哈尔滨 150027)摘 要:设计了一种基于双DSP 的感应电机四象限变频调速系统。
将基于电压定向矢量控制策略的P WM 整流器与传统变频器相结合,通过实时控制输入电流,使变频器的输入电流具有较好的正弦性,其相位与电网电压相同,并自动实现能量双向传递,进而实现了变频调速系统的四象限运行。
采用双DSP 芯片控制方案实现系统功能,给出了具体的软、硬件设计方法,并进行了实验研究,实验结果证明了所提出系统及其实现方法的正确性与可行性。
关键词:变频调速 电压定向 磁场定向 矢量控制 数字信号处理器中图分类号:T M921.5 文献标志码:AAbstract:A f our 2quadrant variable frequency driving system based on dual DSPs f or inductive motor is designed .The P WM rectifier based on voltage 2oriented vector control strategy was combined with traditi onal inverter .Thr ough contr olling input current in real ti m e,the input current is nearly sinus oidal and its phase was the same as the grid voltage,the bi 2directional transfer of the energy is realized automatically,and then the four 2quadrant operati on of variable frequency driving system was realized .The system functi ons were i m p lemented by adop ting dual DSPs control scheme,the particular design method of hardware and s oft ware was given .The experi m ental results p r ove the correctness and feasibility of the system.Keywords:Variable frequency driving Voltage 2oriented Magnetic field 2oriented Vector control D igital signal p r ocessor 修改稿收到日期:2007-11-07。
目录摘要 (1)1系统工作原理 (2)1.1结构与调速原理 (2)1.2调速方案选择 (2)1.3调速电路方案 (3)1.4控制方案选择 (3)2主电路的设计与分析 (3)2.1 主电路的各个部分电路 (3)2.1.1 整流电路 (4)2.1.2 斩波调速电路 (5)2.1.3 保护电路设计 (6)2.2 主电路参数及选型技术要求 (7)2.2.1变压器参数计算 (7)2.2.2整流元件选择 (7)2.2.3滤波电容选择 (8)2.2.4 IGBT 的选择 (8)2.2.5保护元件的选用 (8)2.2.6反馈电路参数选择 (9)3控制电路的设计与分析 (10)3.1 触发电路的设计与分析 (11)3.2脉宽调制(PWM )控制的设计与分析 (11)3.2.1 欠压锁定功能 (12)3.2.2系统的故障关闭功能 (13)3.2.3软起动功能 (13)3.2.4 波形的产生及控制方式分析 (13)3.3 延时驱动电路的设计 (13)3.4 ASR 和ACR 调节器设计 (14)3.4.1 ASR (速度调节器) (14)3.4.2 ACR (电流调节器) (15)3.5控制电路参数选择 (16)3.5.1振荡器T R 、T C 选择 (16)3.5.2电阻10R 、11R 、0R 的选择 (16)3.5.3放大器的参数选择 (17)3.5.4 电阻12R 及13R 选择 (17)3.5.5继电接触器电路的选择与计算 (17)4总电路图 (17)总结体会 (19)参考文献 (21)摘要长期以来,直流电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。
特别随着计算机在控制领域和高开关频率、全控型第二代电力半导体器件的发展,以及脉宽调制(PWM)直流调速技术的应用,直流电机得到广泛应用。
直流电动机转速的控制方法可分励磁控制法与电枢电压控制法两类。
励磁控制法控制磁通,其控制功率虽然小,但低速时受到磁饱和的限制,高速时受到换向火花和换向器结构强度的限制;而且由于励磁线圈电感较大,动态响应较差。
一.论文题目四象限变频调速技术在电牵引采煤机上的应用研究二.内容提要八十年代以后,世界各国的采煤机技术装备为适应煤矿现代化高产高效的需要,加速应用各项新技术,特别是随着微机控制技术和大功率电子元件的发展,美、英、德、日等国的电牵引采煤机迅速发展。
交流变频调速技术在我国煤炭行业采煤机装备上推广应用是在九十年代初开始的,目前该项技术仅应用于水平煤层的电牵引采煤机。
我国煤炭储量丰富,煤炭产量居世界首位,其中缓倾斜煤层的储量占30%左右,目前仍使用技术落后的液压牵引采煤机,无法达到高产高效。
交流电牵引采煤机还未解决在倾斜煤层下行时的制动及能量反馈等牵引问题而无法应用。
本文就电牵引采煤机在倾斜煤层的应用的有关问题进行研究,提出了相关对策,并开发出一套电牵引采煤机四象限变频调速技术系统应用于MGYS180/460-WD型采煤机。
介绍了该系统的设计原理和结构,进行了系统试验、牵引特性试验并对试验情况进行相关分析,结果表明应用该项技术的交流电牵引采煤机能适应倾斜煤层的开采。
三.目的要求四.附有图纸、图表四象限变频调速技术在电牵引采煤机上的应用研究摘要八十年代以后,世界各国的采煤机技术装备为适应煤矿现代化高产高效的需要,加速应用各项新技术,特别是随着微机控制技术和大功率电子元件的发展,美、英、德、日等国的电牵引采煤机迅速发展。
交流变频调速技术在我国煤炭行业采煤机装备上推广应用是在九十年代初开始的,目前该项技术仅应用于水平煤层的电牵引采煤机。
我国煤炭储量丰富,煤炭产量居世界首位,其中缓倾斜煤层的储量占30%左右,目前仍使用技术落后的液压牵引采煤机,无法达到高产高效。
交流电牵引采煤机还未解决在倾斜煤层下行时的制动及能量反馈等牵引问题而无法应用。
本文就电牵引采煤机在倾斜煤层的应用的有关问题进行研究,提出了相关对策,并开发出一套电牵引采煤机四象限变频调速技术系统应用于MGYS180/460-WD型采煤机。
介绍了该系统的设计原理和结构,进行了系统试验、牵引特性试验并对试验情况进行相关分析,结果表明应用该项技术的交流电牵引采煤机能适应倾斜煤层的开采。
第6期(总第175期)2012年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672-6413(2012)06-0139-03櫜四象限运行变频调速性能测试系统雷红玲1,陈政石2(1.广东机电职业技术学院电气工程学院,广东 广州 510515;2.广东石油化工学院计算机与电子信息学院,广东 茂名 525000)摘要:介绍了一种可对四象限运行电机变频调速性能测试的节能型双机同轴变频调速性能测试系统,实现对差频控制的并联逆变器驱动的电动机-电动机组结构方式的交流电机负载性能测试。
该测试系统能够对两台变频器的控制频率进行调整和显示,能够实现定频差和变频差控制调速和异步电机的四象限运行。
关键词:四象限运行;变频调速性能测试;频差控制;节能中图分类号:TP273∶TM32 文献标识码:櫜A国家自然科学基金资助项目(60973112)收稿日期:2012-06-14;修回日期:2012-07-09作者简介:雷红玲(1975-),女,湖南祁东人,讲师,硕士,主要从事电力电子应用技术及电气传动控制研究。
0 引言现有的矿山机械变频调速系统,只能实现固定负载调速控制,而要想得到任意负载的调速控制,在电动机投入系统之前须知道在不同频率下电动机的四象限运行特性,这样才能实现电动机任意速度的控制。
为此,本文设计了一种方便、高效、节能的试验系统。
1 性能测试试验系统分析1.1 频差控制变频调速系统性能测试试验系统方案频差控制的双逆变器结构驱动的电动机—电动机结构方式交流调速试验系统[1]见图1。
驱动电源由双逆变器及其频差控制电路组成,主电路采用了两逆变器直流母线并联工作方式,各自变频输出电压驱动两台电动机。
图1 频差控制变频调速试验系统原理结构图通过控制系统差频,控制两逆变器分别驱动同轴上两台电动机,任一时刻都能使一台工作在电动状态,而另一台工作在再生发电状态。
这样两台电动机的转矩相反,在轴上就建立了一种基于电磁转矩方式的负载形式,对两台变频器的差频值进行控制就可以实现对任意“负载”的控制,差频值保持不变就是恒负载,改变差频值就得到任意大小的负载。
1.2 频差控制变频调速系统性能分析同轴连接两台异步电动机组的结构形式决定了其在任何条件下都有同轴转速n1=n2。
如果能控制它们输入电压的频率不同(f1≠f2),即有一个Δf,根据异步电机变频调速的转速关系,这时机组的拖动状态一定是获得高频电压的电动机M1拖动获得低频电压的电动机M2运行。
根据电动机能四象限工作的原理,则M1应处在电动的工作状态下,M2一定处在再生发电工作状态下,且它们的转矩方向必然相反。
如果在同一坐标下分别画出两台电动机工作在差频控制状态下的机械特性(见图2),机械上采用同轴连接的方式,同轴连接两台异步电动机组的结构形式决定了在稳定时两电机的转速和转矩都相等,即|Te1|=|Te2|,n1=n2,如图2中的AA′线段所示。
此时M1工作在电动机状态(A点),M1产生的电动转矩即是电动机M1的负载转矩。
若降低M2的控制频率f2,而M1的控制频率f1不变,即频差增大,则M2的空载转速将降至n′of2,由于转速不能突变,则M2特性立刻向左平移到nof2对应的机械特性曲线动态工作点D(Td,n1)。
此时|Te1|<|Td|,即M1的电动转矩小于M2的制动转矩,M1、M2转速将下降,直至达到新的负载平衡点,如图2中的BB′线段所示。
此时|Te1′|=|Te2′|,n′2=n′2。
与AA′相比,T′e1>Te1,|T′e2|>|Te2|,即M1的电动转矩和负载转矩都增大了,说明通过增大频差Δf达到了增大电动机负载的目的。
分析特性可以发现,每个频差Δf下都能找到电动机M1和M2间的一个负载转矩的平衡点(电动机能够稳态运行)。
双机的特性关系还反映出一个重要的结论,电动机的负载转矩正比于频差Δf,即差频控制的同轴电动机组的负载转矩与频差Δf之间满足线性正比关系,通过增大频差Δf可达到增大电动机负载的目的。
由图2电动机组机械特性可以看出:改变频差Δf的大小即可改变电动机的电磁负载转矩的大小,从而通过改变频差Δf(可通过改变f1或f2)实现电动机负载的线性变化和对应负载转速升降±Δn的变化;如果保持频差Δf不变(保持恒负载),并同步地增减电动机M1、M2的输入电压频率f1、f2,则电动机组还能实现线性连续的调速,且满足任意负载(Δf)下的线性连续调速。
1.3 频差控制的变频调速系统节能分析频差控制的变频调速系统[2],在任一时刻都能使一台电动机工作在电动状态,而另一台电动机工作在发电状态,这样在电动机轴上就建立了一种基于再生功率回馈作用的电磁转矩方式的负载关系。
系统中,由于电源侧的双逆变器公用三相不控整流桥,发电机再生能量不能直接回馈电网,而电路中的电压型逆变器桥臂二极管组成的反向不控三相桥路给工作在发电状态的电动机提供了再生交流能量的回馈路径,发电机的再生功率通过直流母线传递至工作在电动状态的电动机,而且完全被电动机吸收,从而减少了电动机吸收来自电网的电能。
由此可以看出,调速系统在这种工作模式下,处于发电状态运行的电动机M2的再生能量得到了全部的回馈利用。
在理论上该调速系统消耗的电源功率仅用于系统中电动机组的激磁、损耗和逆变器开关损耗等,因此可以认为该系统此时已是一个没有轴功耗的、高节能的调速系统。
图2 频差控制的电动机组机械特性2 性能测试系统控制单元硬件电路设计再生能量回馈的节能型双机同轴变频调速测控系统要求控制单元能够对两台变频器的控制频率进行调整和显示,并要求控制单元软件能够以定频差和变频差两种控制方式实现调速和异步电机的四象限运行。
选用AT89C52单片机[3]、十位D/A转换器与其他必要的芯片组成单片机控制系统。
AT89C52单片机的外接口芯片有:并行I/O扩展8155、2×4编码键盘、4位LED显示器和两片DA1006LCN数模转换芯片。
部分芯片地址由74LS138译码器的输出决定,采用片选方式。
图3为控制单元电路原理图。
图3 控制单元电路原理图·041·机械工程与自动化 2012年第6期 2.1 利用8155芯片实现键盘/显示器接口系统利用扩展的8155芯片与2×4非编码键盘和4位LED显示器连接组成键盘/显示接口电路,8155的PA0~PA3是输出口控制键盘列线,同时又是4位显示器的位选控制;PB口作为显示器的段数据口;PC口作为输入口,PC1~PC0接键盘的行线。
图3中75452为反向驱动器,4069为同相驱动器,它为LED提供一定的驱动电流。
2.2 DAC1006LCN与AT89C52的接口电路控制系统单元采用DAC1006LCN进行10位D/A转换。
DAC1006LCN是一个10位数/模转换器,在传送数据时先送高8位数据后送低2位数据。
DAC的WR端与89C52的WR端相连,片选CS分别与74LS138的Y1、Y7连接,它们的BYTE1、BYTE2接89C52的P20与P21端,XFER端接在89C52的P23端。
又因为DAC1006LCN输出为模拟电流信号,接uA741后转化为0V~10V的电压信号。
uA741接一个可调电阻可对其进行调零,同时DAC1006LCN的IOUT2输出端接地,可以使uA741的输出电压为单极性输出。
3 系统控制单元软件设计本系统是同轴连接的双机变频调速测试系统,要求控制单元能够对两台变频器的控制频率进行调整和显示。
系统软件采用模块方式设计,针对系统的硬件组成和软件要求,设计了相应主程序、8155初始化程序、键扫描输入子程序、显示子程序、D/A转换子程序和加减数子程序等,主程序流程图见图4。
通过键盘对两台变频器进行频率设定,系统软件会根据键盘的输入命令,做出相应的程序处理,将操作者给定频率通过D/A输出转变为变频器输入的模拟信号,实现频率调节和不同方式控制,这样就可以得到任意速度、任意负载下的运行特性。
4 结语四象限运行矿山机械电机变频调速性能测试试验系统通过对功能键切换可实现恒“负载”调速和变频差调“负载”两种功能。
通过键盘和显示装置实现人机对话,操作者只需要对各功能键进行操作,系统软件就会根据键盘的输入命令做出相应的程序处理,将操作者给定频率通过D/A输出转变为变频器输入的模拟信号,实现任一电机的四象限运行,得到任意速度、任意负载下的调速特性。
系统的特色在于电动机组正常运行状态时通过再生发电能量的回馈利用,实现了交流调速试验系统无功耗负载的工作运行和在恒频差控制下的恒负载调速和变频差控制的恒速调负载,它不仅能实现常规系统的负载调速等各项性能指标,还可以通过调整频差的正负改变拖动系统的工作状态,方便地实现电动机四象限运行,通过实时轴功率再生回馈实现无功耗负载的调速,并达到高效节能的效果。
图4 主程序流程图参考文献:[1] 陈政石,吕振,叶娟.一种高效节能型变频调速试验系统[J].辽宁工程技术大学学报(自然科学版),2000,19(3):288-290.[2] 彭继慎,王辉俊,宋绍楼.基于差频理论的双电动机传动系统研究[J].中国电机工程学报,2005,25(15):150-153.[3] 张俊谟.单片机中级教程———原理与应用[M].第2版.北京:北京航空航天大学出版社,2006.Test System for Four-quadrant Operation Motor VVVF PerformanceLEI Hong-ling1,CHEN Zheng-shi 2(1.Guangdong Vocational College of Mechanical and Electrical Technology,Guangzhou 510515,China;2.Department of Computer and ElectronicsInformation,Guangdong University of Petrochemical Technology,Maoming 525000,China)Abstract:In this article,a energy-saving test system for the variable velocity variable frequency(VVVF)performance of four-quadrantmotors was designed,which used electric motor-motor group structure way.The two motors were controlled by two parallelinvertors based on slip frequency control.By use of the testing system,the control frequencies of the two inverters could bedisplayed and adjusted,and the four quadrant operation of asynchronous motor was realized by fixed frequency-difference control andvariable frequency-difference control.Key words:four quadrant operation;VVVF performance test;frequency-difference control;energy-saving·141· 2012年第6期 雷红玲,等:四象限运行变频调速性能测试系统。