自动操舵仪CAN智能节点的设计与实现
- 格式:pdf
- 大小:281.09 KB
- 文档页数:4

河南理工大学毕业设计(论文)任务书专业班级学生姓名一、题目二、起止日期年月日至年月日三、主要任务与要求指导教师职称学院领导签字(盖章)年月日河南理工大学毕业设计(论文)评阅人评语题目评阅人职称工作单位年月日河南理工大学毕业设计(论文)评定书题目指导教师职称年月日河南理工大学毕业设计(论文)答辩许可证答辩前向毕业设计答辩委员会(小组)提交了如下资料:1、设计(论文)说明共页2、图纸共张3、指导教师意见共页4、评阅人意见共页经审查,专业班同学所提交的毕业设计(论文),符合学校本科生毕业设计(论文)的相关规定,达到毕业设计(论文)任务书的要求,根据学校教学管理的有关规定,同意参加毕业设计(论文)答辩。
指导教师签字(盖章)年月日根据审查,准予参加答辩。
答辩委员会主席(组长)签字(盖章)年月日河南理工大学毕业设计(论文)答辩委员会(小组)决议学院专业班同学的毕业设计(论文)于年月日进行了答辩。
根据学生所提供的毕业设计(论文)材料、指导教师和评阅人意见以及在答辩过程中学生回答问题的情况,毕业设计(论文)答辩委员会(小组)做出如下决议。
一、毕业设计(论文)的总评语二、毕业设计(论文)的总评成绩:三、答辩组组长签名:答辩组成员签名:答辩委员会主席:签字(盖章)年月日摘要随着总线技术的产生和发展,现场总线技术在仪器控制、生产过程等领域起着越来越重要的作用。
其中,CAN总线作为一种有效支持分布式控制和实时控制的技术,以其稳定性好、可靠性高、抗干扰能力强、通讯速率高、维护成本低及其独特的设计逐渐受到人们的重视,并被公认为最有前途的现场总线之一.随着现场总线技术的迅猛发展,传统的自动化仪表受到严重挑战,取而代之的将是具有开放性的现场总线仪表,基于CAN协议的现场总线控制的研究与开发具有非常现实的意义.为了适应科学技术的需要,本文在研究广泛文献的基础上,研制了基于CAN总线的舵机控制,实现了CAN总线舵机控制。
本文在讨论了CAN总线的技术原理和技术规范的基础上提出和实现了基于CAN协议的舵机控制系统。

基于CAN总线智能节点的设计
CAN 总线最早是德国的BOSCH 公司为解决汽车的监测,控制系统而设计的。
现在,已由汽车行业扩展到过程工业,机械工业,机器人和楼宇自动化等领域。
总结各个领域中的应用实例,CAN 通信设计的关键在于各个通信模块的设计与实现。
通信信号一般有模拟量输入/输出(电压电流采集模块),开关
量输入\输出,数字量输入\输出(如计数器模块)等。
本文重点就模拟量输入
模块和开关量输入模块的设计,采用具有CAN 接口的C8051F550 单片机作为系统设计的从节点,用来采集模拟量和开关量,实现与上位机中央控制器的通信。
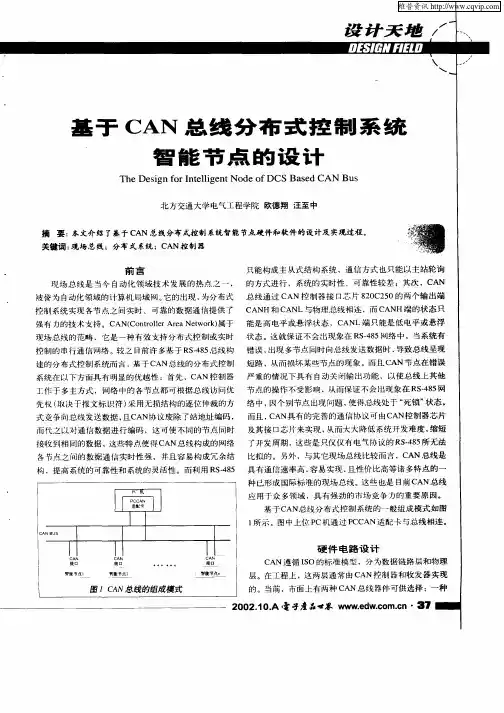
1 CAN 总线通信网络系统
如图1 所示,本设计中通过带有终端器(120 欧电阻)的通信介质(双绞线)将上位机和底层模块连接起来。
实验中,终端电阻和双绞线阻抗的匹配确保了数据信号不会在总线的两端反射。
上位机(主节点)采用USB—CAN 接口适配器(型号GYB507),使PC 机直接通过USB 接口就可连入CAN 总线网络,成为一个标准的CAN 节点。
配合总线通信测试软件CANtool 的使用,可直接配置PC 机的发送与接收状态,通信速率和报文滤波功能等。
同时,还可实时监测显示网络中各从节点与PC 机的数据通信,应用简单、方便。
图1 CAN 总线通信网络结构
2 智能节点硬件设计
传统的从节点设计是将CPU 与CAN 总线控制器和总线收发器相连后再连入总线网络,这样使CPU 外围电路复杂化,整个系统受外部影响较大。
为了
解决这一问题,很多单片机厂商都将CAN 控制器集成在单片机上。
本文中选。

CAN总线系统智能节点设计作者:邹继军饶运涛信息工程系华东地质学院摘要:CAN总线上的节点是网络上的信息接收和发送站;智能节点能通过编程设置工作方式、ID地址、波特率等参数。
它主要由单片机和可编程的CAN通信控制器组成。
本文介绍这类节点的硬件设计和软件设计;其中软件设计包括SJA1000的初始化、发送和接收等应用中的最基本的模块子程序。
关键词:总线节点CAN 控制器引言:CAN (Controller Area Network)总线,又称控制器局域网,是Bosch公司在现代汽车技术中领先推出的一种多主机局部网,由于其卓越的性能、极高的可靠性、独特灵活的设计和低廉的价格,现已广泛应用于工业现场控制、智能大厦、小区安防、交通工具、医疗仪器、环境监控等众多领域。
CAN已被公认为几种最有前途的现场总线之一。
CAN总线规范已被ISO国际标准组织制订为国际标准,CAN 协议也是建立在国际标准组织的开放系统互连参考模型基础上的,主要工作在数据链路层和物理层。
用户可在其基础上开发适合系统实际需要的应用层通信协议,但由于CAN总线极高的可靠性,从而使应用层通信协议得以大大简化。
CAN总线与其他几种现场总线比较而言,是最容易实现、价格最为低廉的一种,但其性能并不比其他现场总线差。
这也是目前CAN总线在众多领域被广泛采用的原因。
节点是网络上信息的接收和发送站,所谓智能节点是由微处理器和可编程的CAN控制芯片组成,它们有两者合二为一的,如芯片P8XC592,也有如本文介绍的,独立的通信控制芯片与单片机接口,后者的优点是比较灵活。
当然,也有不要微处理器的节点。
下面以CAN通信控制器SJA1000为例,对CAN总线系统智能节点硬件和软件设计作一个全面的介绍。
CAN 通信控制器SJA1000 功能简介CAN的通信协议主要由CAN控制器完成。
CAN控制器主要由实现CAN总线协议的部分和实现与微处理器接口部分的电路组成。
对于不同型号的CAN总线通信控制器,实现CAN协议部分电路的结构和功能大多相同,而与微处理器接口部分的结构和方式存在一些差异。

CAN智能节点的设计摘要总线是一种流行的实时性现场总线,文中提出了一种基于430单片机,并以2510为控制器的智能节点设计方案,该方案利用430通过标准接口可实现对2510的控制,并能够完全实现总线规范。
关键词智能节点;430;2510;数据通信1引言CAN总线是控制器局域网ControllerAreaNet-work总线的简称,它属于现场总线范畴,是一种能有效支持分布式控制或实时控制的串行通信网络,它可将挂接在现场总线上作为网络节点的智能设备连接成网络系统,范文先生网收集整理并进一步构成自动化系统,从而实现基本的控制、补偿、计算、参数修改、报警、显示、监控、优化及控管一体化的综合自动化功能。
CAN总线智能节点在分布式控制系统中起着承上启下的作用。
它位于传感器和执行机构所在的现场,一方面和上位机PC或者工控机进行通信,以完成数据交换;另一方面又可根据系统的需要对现场的执行机构或者传感器进行控制和数据采集。
它常常将一些简单的过程控制程序放在底层模块中,从而减少了通信量,提高了系统控制的实时性。
因此,智能化模块设计在CAN系统中有着十分重要的作用。
本文将给出一种用MSP430单片机和MCP2510CAN控制器组成的总线智能节点的设计方案见图1,该方案中的单片机和CAN控制器通过标准的SPI接口进行通信,因此,该节点能够完成对被控器件的数据采集上报,并接受上位机的命令,进而进行解析以完成对执行机构的控制。
为了调试简单,本方案作了一些改动一是使MCP2510工作在环回模式,也就是数据由发送缓存直接发送到接收缓存,由于不经过CAN收发器和CAN总线,而只是使用了它的一个发送缓存和一个接收缓存,因而方便了调试;二是把被控器件的数据采集和对执行机构的控制部分略去,而这些功能在以后可以方便地添加,这样,在实际使用时,只要对程序稍作修改就可应用。
2硬件设计本设计的整个接口模块主要由两部分组成CAN控制器MCP2510和微控制器MSP430。

基于ADμC812的CAN总线智能节点的设计摘要介绍了一种用单片机μ812、总线控制器1000和总线驱动器82250组成的总线智能节点的设计方案,给出了该节点的硬件结构和软件设计方法,同时介绍了总线的主要特点。
关键词总线;μ812;数据采集卡1引言CANControllerAreaNetwork总线协议最初是以研发和生产汽车电子产品著称的德国BOSCH公司开发的,它是一种支持分布式实时控制系统的串行通信局域网。
目前,CAN总线以其高性能、高可靠性、实时性等优点,而被广泛应用于控制系统中的检测和执行机构之间的数据通信中。
CAN总线具有以下一些技术特性●多主方式工作,采用非破坏性的基于优先权的总线仲裁技术;●借助接收滤波可实现多地址的帧传送;●数据采用短帧结构,抗干扰性强,数据帧的信息CRC校验及其它错误检测措施完善;●发送期间丢失仲裁或由于出错而遭破获的帧可以自动重发;●严重错误时可自动关闭总线功能,以使总线其它操作不受影响。
范文先生网收集整理CAN总线符合ISO11898标准,最大传输速率为1MB距离为10km。
CAN总线的传输介质可为双绞线、同轴电缆等。
大公司的支持,加之基于CAN总线的硬件接口简单,编程方便,系统容易集成。
场合。
2系统结构由于CAN总线采用多主方式工作,所以它具有与DCS控制系统不一样的拓扑结构。
其控制系统的构成由计算机和智能节点组成,图1所示是其系统结构。
该系统最大的特点就是所有的节点包括上位PC机都能以平等的地位挂接在总线上。
一个CAN总线节点通常至少包括三个部分,即负责节点任务控制的单片机、CAN总线控制器以及CAN总线收发器。
本文给出的就是一个可完成数据采集功能的CAN节点的设计方法。
3CAN节点的硬件设计本CAN节点的电路原理简图如图2所示。
该电路的三个核心器件是单片机ADμ控制器SJA1000和CAN总线驱动器PCA82C250。
0两者的组合应用已经在很多CAN总线节点的设计中用到,而本设计的特点就在于,它是根据要完成数据采集功能这一具体要求来选用微控制器ADμC812。

基于CAN总线分布式控制系统智能节点的设计前言现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN(Controller Area Network)属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。
较之目前许多RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统在以下方面具有明显的优越性:首先,CAN控制器工作于多主方式,网络中的各节点都可根据总线访问优先权(取决于报文标识符)采用无损结构的逐位仲裁的方式竞争向总线发送数据,且CAN协议废除了站地址编码,而代之以对通信数据进行编码,这可使不同的节点同时接收到相同的数据,这些特点使得CAN总线构成的网络各节点之间的数据通信实时性强,并且容易构成冗余结构,提高系统的可靠性和系统的灵活性。
而利用RS-485只能构成主从式结构系统,通信方式也只能以主站轮询的方式进行,系统的实时性、可靠性较差;其次,CAN总线通过CAN控制器接口芯片82C250的两个输出端CANH和CANL与物理总线相连,而CANH端的状态只能是高电平或悬浮状态,CANL端只能是低电平或悬浮状态。
这就保证不会出现象在RS-485网络中,当系统有错误,出现多节点同时向总线发送数据时,导致总线呈现短路,从而损坏某些节点的现象。
而且CAN节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响,从而保证不会出现象在网络中,因个别节点出现问题,使得总线处于“死锁”状态。
而且,CAN具有的完善的通信协议可由CAN控制器芯片及其接口芯片来实现,从而大大降低系统开发难度,缩短了开发周期,这些是只仅仅有电气协议的RS-485所无法比拟的。
另外,与其它现场总线比较而言,CAN总线是具有通信速率高、容易实现、且性价比高等诸多特点的一种已形成国际标准的现场总线。
自动操舵仪CAN智能节点的设计与实现周岗;陈永冰;孟云飞;徐务农【摘要】在分析使用比较广泛的自动操舵仪结构的基础上,提出基于CAN总线自动舵的整体结构,简要介绍C8051F500单片机的CAN控制器及收发器.对自动舵的CAN通用智能节点进行硬件和软件实现,制定节点标识符分配方案.【期刊名称】《船海工程》【年(卷),期】2013(042)002【总页数】4页(P172-175)【关键词】自动舵;CAN;智能节点;标识符【作者】周岗;陈永冰;孟云飞;徐务农【作者单位】海军902厂,上海200083【正文语种】中文【中图分类】U666.11传统的自动操舵仪内部通信方式并不灵活,也不利于实现全船的网络化。
国内自动舵的研究侧重于理论方面较多,很少针对性地解决工程实际应用中出现的问题,大部分自动舵成品通信线路复杂。
因此本文对通信总线采用CAN总线进行设计。
CAN总线能够灵活地、实时地进行通信,为自动舵实现模块化结构、易于扩展、实现全船网络[1]化打下基础。
CAN总线工作于多主方式,构成的网络节点之间的数据通信实时性强,提高系统的可靠性和灵活性,而RS-485构成主从结构系统,通信方式以主站轮询的方式进行,系统的实时性差。
本文重点分析自动舵信息传递的几种形式,设计以C8051F500为核心的智能通信节点,将多种信号通过智能节点发送到CAN网上,实现CAN网络节点通信以及数据共享。
1 系统基本工作原理及结构1.1 自动舵的基本工作原理自动操舵仪工作时,通过负反馈的方式,不断地把罗经送来的实际航向与设定的航向值进行比较,将差值放大后作为控制信号来控制舵机的转舵,使船舶能自动地保持或改变到给定的航向上。
航向自动舵的系统内有两个反馈回路:舵角反馈和航向反馈。
罗经过来的信号参与的外环和实时舵角信号参与的内环,是一个双闭环控制系统[2]。
航迹自动舵不仅有舵角和航向反馈,还有船位信息送入了主控单元,形成一个反馈系统,见图1。
自动舵控制系统设计船舶借助螺旋桨的推力和舵力来改变或保持航速和航向,实现从某港出发按计划的航线到达预定的目的港。
由此可见,操舵系统是一个重要控制系统,其性能直接影响着船舶航行的操纵性、经济性和安全性。
自动操舵仪是总结了人的操舵规律而设计的装置,是用来控制船舶航向的设备,能使船舶在预定的航向上运行,它能克服使船舶偏离预定航向的各种干扰影响,使船舶自动地稳定在预定的航向上运行,是操纵船舶的关键设备.系统的调节对象是船,被调节量是航向。
自动舵是一个闭环系统,它包括:航向给定环节;航向检测环节;给定航向与实际航向比较环节;航向偏差与舵角反馈比较环节;控制器;执行机构;舵;调节对象—船;舵角反馈机构等。
自1922年自动舵问世到今天,代替人力操舵的自动舵的发展确实取得了长足的进展,在相当程度上减少了人力,节约了燃料,降低了机械磨损,但是距离真正意义上的操舵自动化还有相。
当大的距离。
一国内外研究现状自70年代起,国内一些科研院所、高校开展自动舵的理论与开发工作,并取得了不少成果,一些航海仪表厂家也独立或与研究所、高校合作开展了自动舵的试制和生产,其产品以模拟PID舵为主。
目前虽然国产自适应舵已经投入实船使用,但效果并不明显。
智能控制舵还处于理论研究阶段,还没有产品化。
航迹舵基本上也处于研究阶段,还没有过硬的产品。
目前国外市场上有多种成熟的航向舵、航迹舵产品,其控制方法大多为比较成熟的自适应控制,例如日本Tokimec公司的PR—8000系列自适应自动舵、德国Anschuz公司的NAUTOCONTROL综合系统中的自动舵、美国Sperry公司VISIONTECHNOLOGY系统中的自适应自动舵等。
近几年发展起来的智能控制及其它近代控制在自动舵上应用尚处于方案可行性论证及实验仿真阶段,还有待于进一步工程实现研究。
我国对自适应舵的研究起步较晚,自80年代以来,有关单位开展了对自适应舵的研究工作,发表了一些设计方案,仿真研究结果和产品。

自动操舵仪研制与实现浅谈摘要自动操舵仪是舰船的航行控制的重要设备,对于舰船航行的安全性和经济型起到决定性作用。
由于不同舰船模型的不同,吨位的不同,航行水域不同等导致控制性能的不足,无法完成既定任务或是不能按时将货物运送目的地。
因此研制一款适应不同模型、不同吨位及海况的自动舵操舵仪势在必行,具有重要的战略意义及经济效益。
关键词:自动操舵仪;工作原理;设计2、主要功能用途自动操舵主要用用于舰船的转向控制,一般具有简操、随动、航向、迹向及航迹操舵等功能,同时具有完备的航行状态指示和报警功能。
简操:通过手柄直接控制打舵;航向:通过设定新航向,来输出指令舵角,自动保持设定的指令航向;迹向:结合当前GPS信号,设定新航向后输出指令舵角来保持设定的指令航向;航迹:自动跟踪外部航行计划设备设置的计划航线。
采用ARM芯片为控制核心,其优点是功能完备、启动迅速、控制可靠,整套仪器具有智能化程度高、可靠性好、使用维护方便等特点。
说明:航向、迹向、航迹等工作模式一般使用于较开阔的水域,简操、随动等工作模式一般适用于进、出港等狭窄航道。
3、主要性能指标1)电源电压:AC380V 50Hz,两路,DC24V 一路;2)操舵范围:±35º(标准);3)随动操舵灵敏度:≤1º;4)航向操舵最高灵敏度:≤0.5º航差角;5)航向复示精度 0.1º;6)航向修正范围:0º~±180º,可连续修正。
4、系统组成及工作原理主仪器主要由报警单元、控制单元、罗经复示单元、随动手轮单元、显控单元、泵组选择单元、操舵方式装换单元、简操单元、舵角复示单元及状态设置单元等组成。
自动操舵仪采用ARM芯片为控制核心,采用模糊自适应控制算法,CAN总线进行通信,标准模块化设计,双通道冗余设计,工作时可以通过人为设置指令舵角或是预设航向、或是通过电子海图等航迹规划设备输出预设航线信息进入系统,系统结合当前海况、装载、船舶特性等进行运算、处理后输出控制电磁阀开关方向的信号,即控制液压系统的油压方向从而带动舵机舵叶的往复运转,从而达到改变船舶航向的目的。
基于CAN总线的船舶自动舵监控报警系统设计作者:周韬张显库李博来源:《现代电子技术》2019年第16期摘; 要:为了减少船舶驾驶人员使用自动舵设备航行时引发的事故,并且方便船舶相关人员查看相关故障信息。
以Visual Basic为编程语言,采用双CAN总线通信、串口通信,设计能实时监控自动舵信息并提供报警信息的系统,并详细说明该系统的构架、功能、信息传输接口和界面设计。
以某段航线为例,在该系统上进行仿真测试,结果表明,该系统能实时并且正确地显示航行信息,对超出安全阈值的信息能及时产生报警并且存入数据库。
该系统对减少船舶航行事故有很大帮助,对整体自动舵的安全使用很有意义。
关键词:自动舵; 监控报警系统; 显示航行信息; 仿真测试; 实时监控; 功能说明中图分类号: TN830.1⁃34; TP301.6; ; ; ; ; ; ; ; ; 文献标识码: A; ; ; ; ; ; ; ; ; 文章编号:1004⁃373X(2019)16⁃0117⁃050; 引; 言自动舵设备作为船舶驾驶台的重要组成部分,可以实现改变航向、航向保持、航迹保持等船舶航行功能,这些功能极大地减轻了船舶驾驶员的负担。
随着船舶航运的发展,大型商船越来越离不开自动舵设备的使用。
自动舵设备的普及,减轻了船员的工作强度,节省了燃油,在正常使用的情况下船舶可以更快地到达目的港。
然而,据悉,海难事故大多是人为产生的[1],在船舶安装有自动舵设备后仍然会产生船舶碰撞、搁浅、上滩等事故。
由此可知,很有必要设置自动舵监控报警系统,以实时监控船舶的狀态,并且对故障进行报警和定位。
远洋船舶远程监控系统是船上人员与陆地端的船舶公司信息沟通的重要工具。
为了满足陆地端公司对远洋船舶更有效的监控,崔文彬等应用BP神经网络对船舶机舱监控系统进行改进[2]。
船舶日益现代化、智能化与快节奏营运,船舶的监控和管理是发展的趋势,船舶机舱远程在线监控可以减少事故的发生,但是机舱数据繁多,不易管理,孟维明等提出统一化分类的方法,为机舱数据标准化奠定了基础[3]。
CAN智能节点的设计摘要:CAN总线是一种流行的实时性现场总线,文中提出了一种基于MSP430单片机,并以MCP2510为CAN控制器的智能节点设计方案,该方案利用MSP430通过标准SPI 接口可实现对MCP2510的控制,并能够完全实现CAN总线规范。
关键词:CAN智能节点;MSP43;0 MCP251;0 数据通信1引言CAN总线是控制器局域网(ControllerAreaNet- work)总线的简称,它属于现场总线范畴,是一种能有效支持分布式控制或实时控制的串行通信网络,它可将挂接在现场总线上作为网络节点的智能设备连接成网络系统,并进一步构成自动化系统,从而实现基本的控制、补偿、计算、参数修改、报警、显示、监控、优化及控管一体化的综合自动化功能。
CAN总线智能节点在分布式控制系统中起着承上启下的作用。
它位于传感器和执行机构所在的现场,一方面和上位机(PC或者工控机)进行通信,以完成数据交换;另一方面又可根据系统的需要对现场的执行机构或者传感器进行控制和数据采集。
它常常将一些简单的过程控制程序放在底层模块中,从而减少了通信量,提高了系统控制的实时性。
因此,智能化模块设计在CAN系统中有着十分重要的作用。
本文将给出一种用MSP430单片机和MCP2510CAN控制器组成的总线智能节点的设计方案(见图1),该方案中的单片机和CAN控制器通过标准的SPI接口进行通信,因此,该节点能够完成对被控器件的数据采集上报,并接受上位机的命令,进而进行解析以完成对执行机构的控制。
为了调试简单,本方案作了一些改动:一是使MCP2510工作在环回模式,也就是数据由发送缓存直接发送到接收缓存,由于不经过CAN收发器和CAN总线,而只是使用了它的一个发送缓存和一个接收缓存,因而方便了调试;二是把被控器件的数据采集和对执行机构的控制部分略去,而这些功能在以后可以方便地添加,这样,在实际使用时,只要对程序稍作修改就可应用。
CAN总线智能节点设计现场总线是自动化领域的计算机网络,是当今自动化领域技术发展的热点之一。
它以总线为纽带,将现场设备连接起来成为一个能够相互交换信息的控制网络,是一种双向串行多节点数字通信的系统。
CAN总线也是现场总线的一种,它最初被应用于汽车的控制系统中。
由于其卓越的性能,CAN总线的应用范围已不再局限于汽车工业,被广泛应用到自动控制、楼宇自动化、医学设备等各个领域。
本文设计的CAN智能节点由数据采集电路和通信电路两部分组成。
数据采集系统采用了八路信号采集,并且根据工业现场的情况采用了一种新的高精度信号调理电路,通过此种信号调理电路增强了节点的抗干扰性和稳定性。
单片机对CAN总线控制芯片SJA1000进行正确初始化后,将要发送的数据通过82C250输出至CAN总线。
接收过程中,通过选择将要索取信息的节点及其相关信息的选项,数据流按照上述发送过程通过总线到达被索取节点,再由该节点分析数据包,返回相应数据信息。
所有数据都由SJA1000打包,再按CAN2.0B的BISCICAN模式发送和接收。
本文从课题的研究背景、CAN总线协议、CAN节点以及CAN总线节点之间的通信等方面对CAN总线技术的应用进行了详细阐述,并对CAN总线数据采集节点的硬件设计和软件编程进行了详尽介绍,并且针对系统设计过程中出现的问题,并对其进行了一定的分析。
同主题文章[1].饶家明,田作华. CAN总线智能节点的设计和实现' [J]. 工业仪表与自动化装置. 2002.(05)[2].刘忠,杨世兴. 基于CAN总线的智能节点设计' [J]. 西安科技大学学报. 2003.(04)[3].黄河,高浪琴. 基于CAN总线通讯智能节点的设计与实现' [J]. 江西科学. 2004.(04)[4].徐津,杜尚丰,赵兴炳,张卫. 基于CAN总线的温室智能控制节点的开发' [J]. 仪器仪表学报. 2004.(S1)[5].易军,费敏锐,王红蕾. 基于CAN总线技术的一类智能节点开发及应用' [J]. 测控技术. 2003.(07)[6].宋健. 基于CAN总线的温室智能环境控制系统' [J]. 潍坊学院学报. 2004.(02)[7].罗丁,刘建辉,张全贵. 基于CAN总线的嵌入式监控系统中智能节点研究' [J]. 微计算机信息. 2004.(07)[8].刘雪丽,张长利,朱春波,房俊龙. CAN总线及其智能节点的软硬件设计' [J]. 东北农业大学学报. 2004.(03)[9].徐卓农,万芳瑛,朱俊杰. 一种具有CAN总线接口单片机开发系统的设计' [J]. 湖南工程学院学报(自然科学版). 2004.(02)[10].范焱,王武斌,乔占明,王原会,姚永林. CAN总线智能节点在煤矿运输信、集、闭系统中的应用' [J]. 电脑开发与应用. 2005.(05)【关键词相关文档搜索】:控制理论与控制工程; 智能节点; CAN总线; 低功耗【作者相关信息搜索】:哈尔滨理工大学;控制理论与控制工程;宋清昆;吴立松;。
CAN总线智能节点设计的开题报告一、研究背景随着车辆电子化程度的不断提高, CAN总线作为一种先进的数据传输方式,被广泛应用于车辆领域。
CAN总线通过在车辆多个控制单元之间传输信息,实现不同控制单元之间的通信,进而协调、控制车辆的行进过程。
因此,对于CAN总线的研究和开发一直是车辆电子化领域的重要研究方向。
本课题主要研究CAN总线智能节点的设计,主要涉及到CAN总线的通信协议研究、节点硬件设计和控制算法设计等方面。
二、研究内容1. CAN总线的通信协议研究CAN总线的传输速率高、容错能力强等特点,在车辆应用领域有广泛的应用。
本课题将对CAN总线的通信协议进行研究,包括标准的CAN2.0A/B协议、高速CAN总线协议(CAN FD)等。
2. 节点硬件设计本课题将设计CAN总线智能节点的硬件电路,包括节点控制芯片的选择、电源管理、通信接口等部分。
该部分设计的重点是节点控制芯片的选择和与CAN总线通信的电路设计。
3. 控制算法设计CAN总线智能节点需要能够接收、解析CAN总线上的信息,并根据信息进行相应的控制。
本课题将设计节点的控制算法,使节点能够准确地执行控制指令,并实现车辆控制的功能。
三、研究意义本课题的研究成果将具有以下意义:1.为车辆电子化领域提供一种新的通信方式CAN总线作为车辆电子化领域中的一种通讯方式,其容错能力强、传输速率快等优点,是广泛应用的通信方式。
本研究将为该领域提供一种新的总线节点设计方案。
2.提高车辆控制系统的稳定性和可靠性CAN总线智能节点通过多控制单元之间的通信,能够协调车辆控制系统的各项工作,提高车辆控制系统的稳定性和可靠性。
3.促进车辆智能化的发展智能节点技术是实现车辆智能化的重要手段之一。
本研究对于车辆智能化的发展具有重要推动作用。
四、研究方法本课题的研究方法包括理论分析、仿真实验和系统实现等方面:1.理论分析本研究将分析CAN总线协议的基本原理、节点硬件电路设计的相关知识、控制算法的设计方法等方面的理论知识。
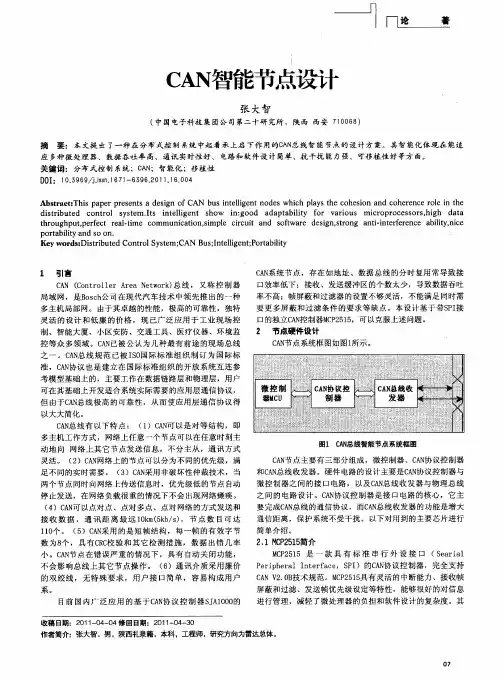
2011•1(下)《科技传播》198基于MC9S08DZ32的CAN智能节点设计黄嘉诚,殷埝生,郭佳琪,凤尔文,谢 梦南京工程学院,江苏南京 210000摘要 本文介绍了一种CAN 节点的设计方法,基于单片机内部集成的CAN 控制器总线接口设计CAN 总线硬件接口,通过对软件编程实现节点初始化。
经验证该节点不仅可以作为数据采集,还可以实现远程监控等功能。
关键词 MC9S08DZ32;CAN 节点;智能节点中图分类号TP368 文献标识码A 文章编号1674-6708(2011)35-0198-020 引言MC9S08DZ32(以下简称DZ32)是Freescale 公司推出的一款性价比较高的8位40-MHz HCS08单片机,片内集成24通道,12位分辨率,2.5uS 转换时间ADC(模数转换);两路SCI(串行通讯接口),可支持LIN2.0协议和SAE J2602协议;MSCAN 协议,支持标准和扩展数据帧;支持远程帧;5个带有FIFO(先入先出)存储的接收缓冲器;32K Flash ;2K RAM ;1K EEPROM。
CAN 总线是Bosch 公司为现代汽车应用而推出的一种总线,与普通串行总线相比,CAN 总线的数据通信具有突出的可靠性、实时性和灵活性。
CAN 总线现已广泛应用于汽车电子、工业现场控制、小区安防、环境监测等众多领域中。
CAN 总线为多主控制方式工作,在总线空闲时,网络上任何节点都可向网络上其它节点发送信息。
设计CAN 通讯接口是很重要的一个环节,设备的正确运行与其密切相关。
1 硬件设计C9S08DZ32˄ҹϟㅔ⿄DZ32˅ᰃFreescale ݀ৌߎⱘϔℒᗻӋ↨䕗催ⱘ8ԡz HCS08ऩ⠛ᴎˈ⠛ݙ䲚៤24䗮䘧ˈ12ԡߚ䕼⥛ˈ2.5uS 䕀ᤶᯊ䯈ADC ˄᭄˗ϸ䏃SCI ˄І㸠䗮䆃ষ˅ˈৃᬃᣕLIN2.0ण䆂SAE J2602ण䆂˗MSCAN णᣕᷛޚᠽሩ᭄ᏻ˗ᬃᣕ䖰ᏻ˗5Ͼᏺ᳝FIFO ˄ܜܹܜߎ˅ᄬټⱘᬊ㓧32K Flash ˗2K RAM ˗1K EEPROM DŽAN ᘏ㒓ᰃBosch ݀ৌЎ⦄ҷ≑䔺ᑨ⫼㗠ߎⱘϔ⾡ᘏ㒓ˈϢ᱂䗮І㸠ᘏ㒓Ⳍ↨ˈᘏ㒓ⱘ᭄䗮ֵ᳝さߎⱘৃ䴴ᗻǃᅲᯊᗻ♉⌏ᗻDŽCAN ᘏ㒓⦄Ꮖᑓ⊯ᑨ⫼ѢᄤǃᎹϮ⦄എࠊǃᇣऎᅝ䰆ǃ⦃๗ⲥ⌟ㄝӫ乚ඳЁDŽCAN ᘏ㒓ЎЏࠊˈᘏ㒓ぎ䯆ᯊˈ㔥㒰Ϟӏԩ㡖⚍䛑ৃ㔥㒰Ϟ݊ᅗ㡖⚍থ䗕ֵᙃDŽ䆒䅵CAN ষᰃᕜ䞡㽕ⱘϔϾ⦃㡖ˈ䆒ⱘℷ⹂䖤㸠Ϣ݊ᆚߛⳌ݇DŽ䆒䅵图1 CAN 智能节点硬件结构框图䳔∖DŽӊ䆒䅵ᅲ䰙ᑨ⫼ЁˈCAN 㡖⚍ᇚᣝ✻Ꮉ㡎⌕䞛䲚໘⧚GPIO ষϞⱘֵোˈৠᯊᇚֵᙃথ䗕ࠄЏキ䖯㸠ᄬټϢ໘⧚DŽ2.1 CAN ᷛ䆚ヺߚ䜡CAN 㡖⚍䕃ӊ䆒䅵ⱘЏ㽕ӏࡵᰃCAN ण䆂ⱘ㾘㣗࣪໘⧚ˈेCAN ᭛ⱘߚ䜡ǃ᭄䗮䆃ⱘᅲ⦄ㄝDŽCAN ᭛ࣙᣀᠽሩᏻḐᓣ˄CAN2.0B ˅ǃᷛޚᏻḐᓣ˄CAN2.0A ˅䖰ᏻḐᓣ3⾡ˈᴀ䆎᭛Ёখ㗗iCAN ण䆂㾘㣗ˈՓ⫼ᠽሩᏻḐᓣ䖯㸠᭛ߚ䜡ˈབ图2 CAN 智能节点硬件电路图图1所示为CAN 智能节点硬件结构框图。