双舵自动操舵仪
- 格式:pdf
- 大小:728.46 KB
- 文档页数:16
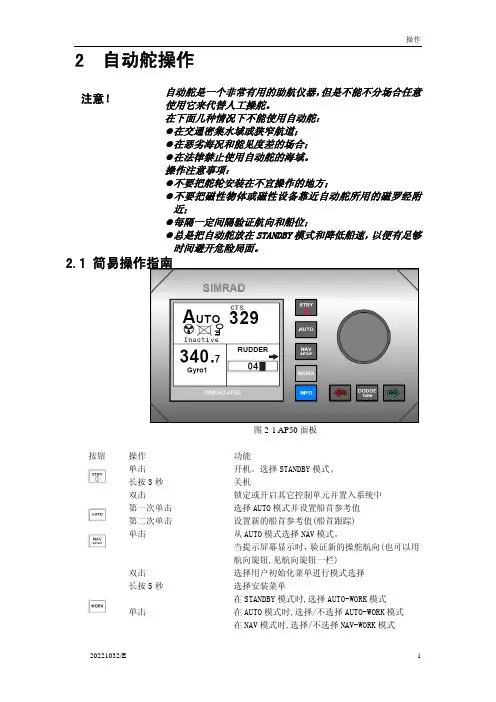
DC-ⅢS型自动操舵仪使用说明书上海航海仪器责任公司2011年5月DC-ⅢS自动操舵仪使用说明书技术责任会签单编制:校对:标审:审核:质量会签:审定:批准:目录1. 概述------------------------------------------------------------------------------------------- 32. 主要技术参数------------------------------------------------------------------------------- 33. 系统组成------------------------------------------------------------------------------------- 4 3.1 配套------------------------------------------------------------------------------------------- 43.2 必需的配套仪器----------------------------------------------------------------------------- 44. 仪器组成-------------------------------------------------------------------------------------- 4 4.1 主操舵台-------------------------------------------------------------------------------------- 4 4.1.1 1#泵启动和报警模块、2#泵启动和报警模块--------------------------------------- 4 4.1.2 电源开关------------------------------------------------------------------------------------- 4 4.1.3 系统选择开关-------------------------------------------------------------------------------- 5 4.1.4 模式选择开关-------------------------------------------------------------------------------- 5 4.1.5 应急操舵开关-------------------------------------------------------------------------------- 5 4.1.6 主随动发令模块---------------------------------------------------------------------------- 5 4.1.7 显示器模块---------------------------------------------------------------------------------- 5 4.1.8 1#电源滤波组件、2#电源滤波组件---------------------------------------------------- 6 4.1.9 KZQ-I控制器和KZQ-II控制器------------------------------------------------------------ 6 4.1.10 报警器--------------------------------------------------------------------------------------- 7 4.2 舵角反馈器------------------------------------------------------------------------------------ 7 4.3 操舵控制箱------------------------------------------------------------------------------------- 74.4 1#、2#舵机启动箱---------------------------------------------------------------------------- 75 操作说明-------------------------------------------------------------------------------------- 7 5.1. 操舵仪的启动与停止----------------------------------------------------------------------- 7 5.1.1 启动-------------------------------------------------------------------------------------------- 7 5.1.2 停止-------------------------------------------------------------------------------------------- 8 5.2. 控制系统的选择----------------------------------------------------------------------------- 8 5.3 手动应急操舵--------------------------------------------------------------------------------- 8 5.3.1. 舵机舱应急操舵---------------------------------------------------------------------------- 8 5.3.2 主操舵台应急操舵------------------------------------------------------------------------- - 9 5.4. 随动操舵-------------------------------------------------------------------------------------- 9 5.4.1 主操舵台随动操舵-------------------------------------------------------------------------- 9 5.5 自动操舵------------------------------------------------------------------------------------- 9 5.5.1 自动操舵方法------------------------------------------------------------------------------- 9 5.5.2 航向的设定---------------------------------------------------------------------------------- 10 5.5.3 自动限舵角度的设定---------------------------------------------------------------------- 10 5.5.4 自动操舵参数设定-------------------------------------------------------------------------- 10 5.5.5 自动操舵性能的优化------------------------------------------------------------------------ 115.6 操舵仪的报警系统------------------------------------------------------------------------- 12 5.6.1 操舵仪控制器报警------------------------------------------------------------------------- 12 5.6.2 舵机警报------------------------------------------------------------------------------------- 12 5.6.3 操舵仪控制器失电报警------------------------------------------------------------------- 12 5.7 照明调光------------------------------------------------------------------------------------- 12 5.7.1 显示器调光--------------------------------------------------------------------------------- 12 5.7.2 随动发令模块调光------------------------------------------------------------------------- 135.8 语言选择------------------------------------------------------------------------------------- 136. 安装------------------------------------------------------------------------------------------- 137. 试验------------------------------------------------------------------------------------------- 13 7.1系泊试验------------------------------------------------------------------------------------- 13 7.2航行试验------------------------------------------------------------------------------------- 147.2.1 舵角倍率的设定--------------------------------------------------------------------------- 148. 安全和维护保养---------------------------------------------------------------------------- 159. 备品与备件---------------------------------------------------------------------------------- 1510. 保证事项------------------------------------------------------------------------------------- 15 附图1------------------------------------------------------------------------------------------------- 16DC-ⅢS型自动操舵仪使用说明书1 概述DC-ⅢS型自动操舵仪是船舶航行的重要设备。
【船海百科】图解几种常用的舵机跑过船的人应该知道,船上大型机器设备的“四机一炉”,亦即主机、发电机、锚机、舵机和锅炉。
这些都是与船舶推进和操纵极其密切的关键设备。
之前我们推出过一期文章,讲解各种推进装置。
今天为与小刀昨天的舵设备相呼应,简单介绍以下几种常用的舵机,以飨读者。
本期文章部分图片资料,由甲板机械的领导品牌海特拉帕友情提供。
ps,海特拉帕已经于2013年被Cargotech旗下的麦基嘉收购,以增强其绞车方面的业务,同年麦基嘉还收购Aker Solutions的系泊和装载系统部门。
言归正传开始本期文章。
舵机按照机构分为电力,机械和液压三种方式;按照动力源的方式有人力、气动、电动、液压四种;船用舵机目前多用电液式,即液压设备由电动设备进行遥控操作,电液式又可分为两大类型,一种是往复式,往复式又包括摆杠式,柱塞式和拨叉式等几种。
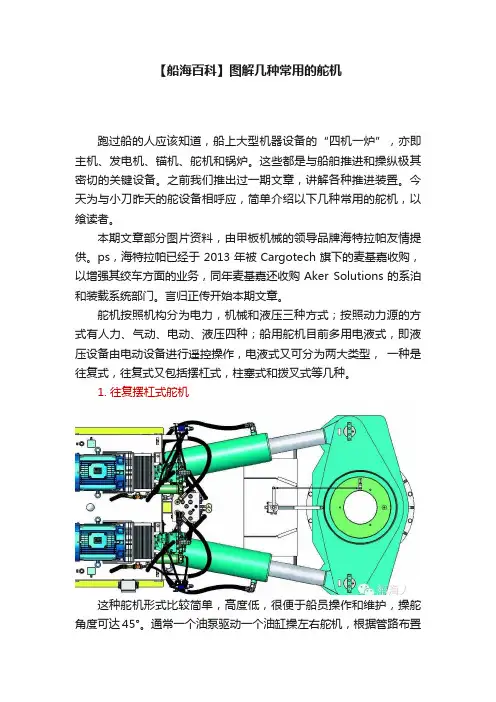
1. 往复摆杠式舵机这种舵机形式比较简单,高度低,很便于船员操作和维护,操舵角度可达45°。
通常一个油泵驱动一个油缸操左右舵机,根据管路布置情况,左右舵机可以互换,也可以双泵驱动。
通常设有2台互为备用的液压泵站(或1台液压泵站与1台机带泵组互为备用),24V电动操纵、手轮操纵、手轮应急操舵等多种操舵型式。
具有多重自锁能力、舵角稳定功能。
在船上系统总成如下所示。
2. 往复柱塞式舵机柱塞式舵机,其原理是通过高低压油的转换而做功产生直线运动,并通过舵柄转换成旋转运动。
目前,船上常用的有二缸柱塞式液压舵机和四缸柱塞式液压舵机。
图为二缸柱塞式液压舵机示意图。
柱塞式液压舵机一般由转舵机构、动力源和操纵追随机构三大部分组成。
动力源由电动机、主油泵、辅油泵和控制阀箱等组成。
电动机带动主、辅油泵供给工作需要的各种压力油,安全控制阀是起保护作用和对压力油的分配。
转舵机构由油缸、柱塞和舵柄等。
当操舵装置控制系统启动电机带动变量泵时,变量泵从一对(或一个)油缸中抽油,同时向另一对(或一个)油缸输油,从而推动柱塞直线运动并使舵柄绕舵杆作旋转运动,产生舵角。
关于操舵装置审图、检验、发证的规定根据本社《钢质海船入级规范》2006(以下简称《海规》)第3篇的要求,为进一步明确本社规范对于操舵装置审图、检验、发证的要求,特制定本补充规定。
一、操舵装置的电动操舵控制系统的机械和电气独立性操舵装置控制系统的主、辅操舵装置的电气/电子操舵装置控制系统应符合 IACS UI SC94的要求。
二、操舵装置电气控制系统的独立性1.安装在各单元、控制箱、配电板或驾驶室操舵控制台等上的两套操舵装置控制系统的布线安装应按照IACS/UI/SC94第2条、第4条、第5.1条要求进行布置,在接线箱中的电线、接线端子和部件应进行分隔,并在空间上尽可能远离布线。
2.当布置在同一控制箱中的两套控制系统的电线、接线端子和部件的分隔不可行时,应在电线、接线端子、和部件间设置滞燃隔板予以分隔。
3.操舵装置中双套泵组的供电电缆和控制电缆,应在整个长度上尽量在水平和垂直方向远离敷设,一般在船舶的两舷分开敷设,具体操作应按IACS的UI SC94的要求执行。
4.操舵装置中电气部分的供电系统、控制系统、监测报警系统图由产品(电气)进行图纸审查。
提交本社审查的电气图纸中应标明电源及控制线路,并应分开独立布置。
5.对于电磁/电液阀的接线应独立并尽可能远离布设,提交本社审查的说明书中应有电磁/电液阀独立的接线示意图,并明确说明如何接线。
三、舵机具有双泵同时操舵运行时的液压阻塞报警对于驾驶台具有双泵同时操舵功能的操舵装置,均应按本社规范要求设置液压阻塞报警。
传感器的形式应得到本社批准。
四、对于操舵控制系统失电报警的要求1.对《海规》第13.1.9.3条的解释:不管控制系统的供电方式如何,操舵控制系统的电源供应发生故障时,均应在驾驶室发出听觉和视觉报警;控制系统的供电应满足《海规》第13.1.8.5(4)条的要求并尽量取自动力电源。
2.驾驶室配置的操舵系统报警装置应能分别显示不同系统的故障。
3.对操舵控制系统的冗余电源(额外增加1路DC24V供电时),应满足如下条件:1)在操作位置应有该电源的专用独立电源指示,当DC24V失电且无论另2路控制电源是否有电,该指示灯应不亮;2)该冗余DC24V电源的接入不应破坏原两路控制系统的独立性,原两路控制电源失电后应仍能发出控制电源失电报警,且对应的控制电源指示灯应熄灭。
PR-6000-DW自动舵TokyoKeiki PR-6000DW自动舵作为一款简便的操纵仪,具有4种操作模式,可以通过右下角的选择开关来选择:远程遥控模式(RC:此模式具有2种模式:1-REMOTE CNTROLl 2-NAV),手动操纵(HAND)、应急操纵(NFU)、自动操纵(AUTO:此模式具有2种模式:1-ADPT、2-PID)。
具有双重模式的自适应舵具有两套完整的系统,通过系统选择开关有以下几档:左侧NO.1-ON中间-OFF右侧-NO.2,当开关转至所需运行的模式时,系统会自动进入运行状态,而当开关转到OFF档时,整个系统将停止工作。
简单的操作模式肯定是建于比较先进的技术支持以及硬件上的下面就来简单介绍下自动的组成以及工作原理一:组成1:AUTO PILOT STAND (自动舵操作模块,可以在上面选着运行模式,接收发送信号,查看报警,以及一些简单的设置)2:GYRO COMPASS(电罗经,提供船的真实方位以及提供给自动舵自动导航基数)3:CONTROL BOX(控制箱,接收并反馈处理操舵信号)4:REPETER BACK UNIT(反馈单元,反馈比较信号给操舵台使舵角度数得到精确化处理)二:操作使用自动舵是一套使船舶维持在预先设定的航向上航行的自动操舵控制装置,它能使船舶精确维持航向并且在各种情况下使船在航行中自动计算出最省油的操纵。
然而,船舶的操纵取决于船舶的尺度及具体的技术指标,同时也随着船舶的航速,装载情况及海况的不同而不同。
为了使自动舵具备航向精准性和燃料节省性PR-6000自动舵带有以下的功能:1控制操纵装置运用的是一套微处理器2基本控制方式是自适应控制系统反馈模型3根据船舶速度和装载状况的改变能迅速调整,能够在各种状态下,进行最佳的操纵。
4 AUTO模式下的ADNPT状态适用于各种海况:OPEN SEA(开放水域模式)适用于只需小幅度操纵导航的情况,如在大洋上航行,为的是节省燃料的费用。

CD-50自动操舵仪操作规程
一、手动操舵
1.将舵机开关拨到1#或2#舵机。
2.将面板上的操舵模式手柄转换开关转到“随动”,自动舵面板上的模式开关转到HEAD AUTO上,此时转动舵轮或按自动舵面板上的左右电磁阀控制按钮进行手动操舵。
二、自动操舵
3.当航向把定后将面板上的操舵模式手柄转到“自动”,自动舵面板上的模式开关转到HEAD AUTO,自动舵显示器显示当前航向和设定航向,此时为自动操舵。
当需要该变设定航向时,按下改变设定方位键向左或向右改变航向。
4.当与他船有碰撞危险需用手动舵大角度转向避让时,将面板上的操舵模式手柄转到“随动”,转动舵轮或按自动舵面板上的左右电磁阀控制按钮进行手动操舵转向避让。
当避让完成后,手动操舵将航向恢复到原航向,将面板上的面板上的操舵模式手柄转到“自动”,自动操舵。
三、应急操舵
当舵机电源、电动设备、油泵组件等发生故障或损坏,驾驶台不能操舵时,改由舵机间操舵时,按以下步骤操作
1.将航速降至正常航速的一半。
2.将舵机间墙壁上的舵机控制开关转到机旁控制。
3.由驾驶员通过电话或对讲机接受驾驶台的命令,由水手操纵手柄
向左或向右转向。
自动操舵仪主要用途自动操舵仪可实现船舶的航向自动控制,具有航向自动操舵、随动操舵、手动操舵和急操舵及舵机状态指示和舵机监控报警等功能。
自动部分为独立的进口自动系统,随动和手动采用了集成电路和大功率开关管,使整套仪器具有功能完备、性能稳定、控制精度高、使用维护方便等特点。
本仪器适用于液压舵机的大、中、小型船舶使用。
主要技术性能1、电源:AC380V、50Hz;220V、50Hz;DC24V;A:三相380V, ±5%B:220V、50Hz,±5%C:DC24V、3A,+10% ~ -10%2、操舵方式:自动、随动、手动;3、操舵范围:±40º;4、操舵精度:≤1º;5、不灵区: 0.5º~2º可调;6、手操方式下可双泵工作;7、报警范围:动力电源失电、过载、断相、控制电源失电,油液低液位、油液高温、滤油器堵塞、压力差、罗经故障;并具有报警试验功能和消音后自动复位功能;8、电磁阀参数:DC24V、额定电流≤3A;配套方案表序号名称型号数量防护1 驾驶室主仪器DD101-ZTG 1 IP222 1#油泵启动箱SC9-K 1 IP223 2#油泵启动箱SC10-K 1 IP224 舵机舱报警箱CKD-4 1 IP225 反馈舵角发送器DD101-WK 1 IP566 自动反馈发送器FB-40 1 IP567 手操舵开关箱SC3-K 1 IP22DD101-ZTG主仪器外形图SC9/10-K油泵启动箱外形图CKD-4舵机舱报警箱外形图DD101-WK反馈舵角发送器外形图FB-40自动反馈发送器外形图SC3-K手操舵开关箱外形图DD101-ZT随动操舵仪主仪器1#油泵起动箱2x1 22x1 2 2x1 2 2x1 2 3x6 3 3x6 3至1#系统电磁阀至1#系统行程开关至1#系统电磁阀至1#系统行程开关(左)(右)(右)(左)1#油泵电机1#380V电源2x1 22x1 22x1 22x1 23x6 33x6 3至1#系统电磁阀至1#系统行程开关至1#系统电磁阀至1#系统行程开关(左)(右)(右)(左)1#油泵电机1#380V电源2#油泵起动箱舵机舱报警箱CKD-4SC9-KSC10-K舵机舱手操舵开关箱SC3-K舵机反馈 舵角发送器DD101-WK1#油液低液位1#压力差4x134x135x132x1 22x1 2至船电应急电源DC24V至船电源AC220V12x1115x1 1315x1 132x1 22x1 2 1#油液低液位1#压力差3x1 22x1 21#油温高温2x1 21#油温高温2x1 21#滤油器堵塞2x1 21#滤油器堵塞2x1 212x1110x1 910x1 93x133x134x1 4无源常闭触点800公共点±10V随动反馈输出±10V随动发送输出1#启动常开触点2#启动常开触点操舵方式无源输出触点公共点3504x142x123x132x1 22x1 22x1 218x1 17自动反馈发送器FB-404x132x1 2自动舵电源DC24V至GPS至电罗经2x125x15分罗经系统布置图2052091051091051081091111121131141161331341361381391401381394094074054034013011A1B 1C 1RJ11RJ21RJ31391421421331381411411331051092052092A2B 2C 2RJ12RJ22RJ3239242242233238241241233205208209211212213214216233234236238239240238239410408406404402301138139140238239240121212121212331234123456789101112131234567891231234567891011121312345671231212123456789101112131234567123456789101112131234567893412121212121212331231231212+-1234x12x12x12x12x13x63x613x12x12x18XK18DCF18DCF28XK2SC9-K (左行程)(右行程)(右电磁阀)(左电磁阀)1#油泵电机1#380V电源DD102-ZT随动操舵仪主仪器AC 220V SC10-K2x12x12x12x13x63x69XK19DCF19DCF29XK2(左行)(右行)(右阀)(左阀)2#油泵电机2#380V电源舵机舱手操舵开关箱SC3-K1#油泵起动箱2#油泵起动箱4024044064084103013013033143163183203223264014034054074093013013033133153173193211234567123456734567891234567舵舱报警箱CKD-44113012x1121#压力差1#油位低2x1301409122x1122#压力差2#油位低2x112301410301412舵机反馈 舵角发送器DD101-WK41184121241112滤油器堵塞1#2x130141312滤油器堵塞2#2x1301414412323883248812油液高温1#2x1301415122#2x1301416油液高温41341394149941432599JX1JX2JX31010DC 24V 4164154154163283271010报警电源舵角电源123128218232382282423123456451212349101112131415161712345123456789101112123Z1Z2Z35x160660860560760912912512622922622513x19x110x13x 13x110x13x13x11#启动常开触点2#启动常开触点±10V随动反馈输出±10V随动发送输出无源输出操舵方式公共点350801803805807809811813802804806808810812814816815105108109111112113114116133134136138139301303313315317319321323325327125126129P N TH TC301303351350GND1SIG1353352601602605606607608609COM D1D2F1F2+-F3GYH GYC 205208209211212213214216233234236238239301303314316318320322324326328225226229GC H 1212+-2x1DC 24V 自动舵电源123GPS123Z3自动舵反馈FB-403x1黑白红至罗经1231分罗经80012345678无源常闭触点公共点8003011T2T3L1L2C01C02T11234512分罗经罗经故障输出线缆连接图。
船舶自动操舵仪故障分析及其解决方案作者:李成玉摘要:文章分析了半导体分立元件和集成电路设计的自动舵工作原理,指出它们的缺点及其故障产生的根本原因。
应用可编程序控制器(PLC)技术研制的自动舵,克服了常规自动舵的缺点及其参数整定困难和控制效果的不足。
自整定比例微积分调节器(PID)自动舵能够自动适应船况和海况的变化,实现无扰动切换、变增益调节、抗积分饱和、微分先行等功能,克服了舵机振荡。
实船应用证明了该自整定比例微积分调节器船舶自动舵的有效性。
0引言船舶自动操舵仪是保证船舶安全航行的重要设备,而舵机振荡出现的故障率最高。
我国造船工业已具规模,每年生产艘数甚多的小型船舶,开发出性能可靠、价格合理的船舶自动操舵仪,完全可以得到推广和应用。
针对船舶自动操舵仪出现的故障,分析了其控制单元的特点及工作原理,给出了通用的性价比高的技术解决方案。
1常规自动舵控制单元分析1)半导体分立元件自动舵。
半导体分立元件正常工作需要一定的条件,若超出其允许的范围,将不能正常工作,甚至造成永久性的破坏。
对于大功率管的功耗能力并不服从等功耗规律,其工作电压升高,其耗能功率相应减小。
三极管在工作时,可能Uce并未超过BUceo,Pc也未达到Pcm,而三极管已被击穿损坏了。
因此,使用半导体模拟元件要考虑di/dt、du/dt的影响,即使在其允许工作范围内也可能造成损坏。
特别是外延型高频功率管,在使用中要防止二次击穿。
元器件老化、特性飘移,引起性能下降、工作不稳定,故障率最高。
2)集成电路设计的自动舵。
集成电路与分立元器件组成的电路相比,具有体积小、功耗低、性能好、重量轻、可靠性高、成本低等许多优点。
但同样对电源电压、温度、湿度等外界因素变化敏感,其内部又存在固有噪声,这些将引起回路特性和参数变化,降低其稳定性和可靠性。
其功能扩展困难,难以调试,不能在线修改和故障诊断,对制作工艺要求很高。
故障分析和排除十分困难。
3)舵机振荡出现的几率最高。
自动操舵仪CAN智能节点的设计与实现周岗;陈永冰;孟云飞;徐务农【摘要】在分析使用比较广泛的自动操舵仪结构的基础上,提出基于CAN总线自动舵的整体结构,简要介绍C8051F500单片机的CAN控制器及收发器.对自动舵的CAN通用智能节点进行硬件和软件实现,制定节点标识符分配方案.【期刊名称】《船海工程》【年(卷),期】2013(042)002【总页数】4页(P172-175)【关键词】自动舵;CAN;智能节点;标识符【作者】周岗;陈永冰;孟云飞;徐务农【作者单位】海军902厂,上海200083【正文语种】中文【中图分类】U666.11传统的自动操舵仪内部通信方式并不灵活,也不利于实现全船的网络化。
国内自动舵的研究侧重于理论方面较多,很少针对性地解决工程实际应用中出现的问题,大部分自动舵成品通信线路复杂。
因此本文对通信总线采用CAN总线进行设计。
CAN总线能够灵活地、实时地进行通信,为自动舵实现模块化结构、易于扩展、实现全船网络[1]化打下基础。
CAN总线工作于多主方式,构成的网络节点之间的数据通信实时性强,提高系统的可靠性和灵活性,而RS-485构成主从结构系统,通信方式以主站轮询的方式进行,系统的实时性差。
本文重点分析自动舵信息传递的几种形式,设计以C8051F500为核心的智能通信节点,将多种信号通过智能节点发送到CAN网上,实现CAN网络节点通信以及数据共享。
1 系统基本工作原理及结构1.1 自动舵的基本工作原理自动操舵仪工作时,通过负反馈的方式,不断地把罗经送来的实际航向与设定的航向值进行比较,将差值放大后作为控制信号来控制舵机的转舵,使船舶能自动地保持或改变到给定的航向上。
航向自动舵的系统内有两个反馈回路:舵角反馈和航向反馈。
罗经过来的信号参与的外环和实时舵角信号参与的内环,是一个双闭环控制系统[2]。
航迹自动舵不仅有舵角和航向反馈,还有船位信息送入了主控单元,形成一个反馈系统,见图1。
CSGZ 版本号:QSMS-2 文件编号:QSMR-NA4-D-01 页次:1/1HQ-系列型自动操舵仪操作规程一.根据需要将机组选择开关由停止位置转到I或II的位置来接通I或II舵机机组。
二.视情况调整“亮度调节旋钮”使罗经面板航向改正及舵角指示器到所需的亮度。
三.向下拉航向匹配旋钮的保险销并按住航向匹配旋钮,转动该旋钮修正自动舵面板上的航向指示刻度盘与陀螺罗经的同步误差。
(无特殊情况勿动该旋钮)四.手动操舵:a.先将操纵选择开关转到手动位置。
b.操作左及右两个手柄即可操纵左、右两台舵机至所要的舵角位置(舵角指示器位于操纵台的左边)。
c.当要操某一舵角时,操纵操舵手柄并看住舵角指示至该舵角之前就要松开手柄,此时舵就转到所要求的舵角位置。
五.随动操舵:a.将操纵选择开关转到随动位置。
b.转动手轮到所要的舵角位置,即可操纵舵机进行左、右操舵。
六.自动操舵:a.当要走某一即定的航向时,先用随动操舵将船首稳定在该航向上。
b.向下拉航向改正旋钮保险销,并按住航向改正旋钮,转动该旋钮使航向改正显示窗内的航向刻度至所要走的航向。
c.将操纵选择开关转到自动的位置,舵机即可自动操舵。
七.面板上的各旋钮的功能:a.灵敏度调节旋钮(也称天气调节旋钮)在良好海况下,灵敏度可以调节高些;反之,在恶劣海况下,灵敏度应调低些。
b.比例调节调节时应根据海况、船舶装载情况和舵叶浸水面积等不同情况而定。
海况恶劣、空载、舵叶浸水面积小,应选用高档;风平浪静船舶操纵性能好时用低档。
c.微分调节重载、旋回惯性大时微分要调大;反之,要调小。
海况恶劣,微分作用要调小或调至0。
d.压舵调节(1)将压舵调节选择开关转到压舵位置,然后调节面板上的压舵旋钮使舵叶偏转一个固定的角度,以抵消单侧偏航作用。
(2)当有不对称偏航情况下,应将压舵调节选择开关转到积分位置,舵机就可自动向左或向右进行压舵。
e.航向改变调节在使用自动舵时用来改变航向。
若要向右改变航向5°,按下旋钮,向右转到5°处,待船舶转到给定航向时,指针能自动回零,不需人工复位。
第4章操舵仪4.1适用范围4.1.1本章适用于在海上航行船舶的各类航向控制仪——自动操舵仪、随动操舵仪的单件/单批产品检验和型式认可。
4.1.2手动等简易操舵仪可视情况参照执行。
4.2认可和检验依据如下:(1)CCS《钢质海船入级规范》(2006);(2)海安会决议MSC.64(67)附件3自动操舵仪性能标准A.342(IX)号决议修正案;(3)CCS GD01-2006《电气电子产品型式认可试验指南》;(4)SOLAS公约1981修正案第Ⅱ-1/29条;(5)IEC60945-2002《船舶航海和无线电通信设备系统一般要求、试验方法和要求的试验结果》。
4.3图纸资料4.3.1下列图纸资料应提交CCS批准(6)产品技术条件;(7)系统原理图或示意图;(8)舵机启动箱原理图;(9)外形结构图及板面布置图;(10)型式试验大纲。
4.3.2下列图纸资料应提交CCS备查:(1)产品使用说明书;(2)系统组成方框图;(3)各组成部分接线图;(4)试验记录表(样本)。
4.4设计技术要求4.4.1本章适用的操舵仪除应满足IEC 60945-2002《船舶航海和无线电设备系统一般要求、试验方法和要求的试验结果》的有关要求外,还应满足本章要求。
4.4.2在下列环境条件下正常工作:(1)环境温度:0℃~+45℃,对电子设备上限为55℃;(2)横倾、横摇22.5°,纵倾、纵摇10°;(3)船舶正常营运中所产生的振动和冲击;(4)潮湿空气、盐雾、油雾和霉菌;(5)外壳防护等级应满足CCS《钢质海船入级规范》(2006)第4篇第1章的相关要求;(6)电磁兼容性应满足CCS GD01-2006《电气电子产品型式认可试验指南》的要求。
4.4.3在以下正常电压和频率波动情况下可靠工作:(1)交流电压:稳态+6%~-10%,频率±5%;(2)瞬态±20%,恢复时间1.5s;(3)直流电压:+30%~-25%;。
双舵轮agv原理
双舵轮AGV原理
双舵轮AGV是一种自动导航小车,它采用双舵轮驱动方式,可以实现精准的定位和导航,广泛应用于物流、制造业等领域。
那么,双舵轮AGV的原理是什么呢?
双舵轮AGV采用的是双舵轮驱动方式,这种驱动方式可以使车辆在行驶过程中更加灵活,可以实现360度旋转和侧移等操作。
双舵轮AGV的驱动系统由电机、减速器、轮子和传感器等组成,其中电机和减速器负责提供动力,轮子负责转动,传感器则用于检测车辆的位置和方向。
双舵轮AGV的导航系统采用的是激光导航技术,这种技术可以实现高精度的定位和导航。
激光导航系统由激光雷达、控制器和电脑等组成,激光雷达负责扫描周围环境,控制器负责处理数据,电脑则用于控制车辆的运动。
双舵轮AGV的控制系统采用的是自主导航技术,这种技术可以使车辆自主完成路径规划和避障等操作。
控制系统由主控板、传感器和通信模块等组成,主控板负责控制车辆的运动,传感器用于检测周围环境,通信模块则用于与其他设备进行通信。
双舵轮AGV的原理是基于双舵轮驱动、激光导航和自主导航技术,通过电机、减速器、轮子、传感器、激光雷达、控制器、电脑、主
控板、通信模块等组成的系统,实现车辆的自主导航和运动控制。
这种技术可以提高物流和制造业的自动化水平,提高生产效率和质量,为企业带来更多的经济效益。
型船舶自动操舵仪安全操作及保养规程随着科技的不断发展,越来越多的船舶开始使用自动操舵系统,型船舶自动操舵仪安全操作以及保养规程成为非常重要的问题。
本文将详细介绍型船舶自动操舵仪的操作技巧和保养方法,以保障船员的安全和船舶的正常运行。
型船舶自动操舵仪操作规程1. 操舵前的准备在使用型船舶自动操舵仪前,必须进行一系列的准备工作:1.确认自动操舵仪的启动方式和电源状态2.确认舵机和控制设备的连接状况3.确认电动舵机和传感器的工作状态2. 开启自动操舵在操纵室或船长室将自动操舵仪调整至自动工作状态,并在主控制台上设置自动操舵的目标航向和速度。
此时,操作员还需确认指南针和陀螺仪的校准状况。
3. 监控航行状态开启自动操舵后,船舶可以自动行驶至指定航向和速度。
此时,操作员需要监控速度、航向等参数,随时调整操作、校正系统偏差。
如果发现航行状态不符合预期,操作员应该立即进行调整,保障船舶安全。
4. 手动控制如果需要更改航向或速度,可以通过自动操纵面板或控制杆手动操作。
在手动操纵时,应当关闭自动操纵系统,并保障手动操纵平稳。
同时,需要监控航向、水深、风向等信息,及时进行调整。
5. 关闭自动操舵当需要关闭自动操舵时,需要先将自动操控面板设为手动模式,然后将舵机归中,排除可能的系统误差。
最后,确保自动操纵面板和控制杆的操作设定参数均已清除。
型船舶自动操舵仪保养规程1. 定期检查型船舶自动操舵仪应定期进行检查,包括检查传感器、控制面板、电源等设备的工作状态。
检查可能出现的故障,及时更换或维修。
2. 清洁和防护型船舶自动操舵仪应保持清洁,并做好防护措施,防止海水、油脂、硫化氢等物质侵蚀和污染。
在各种恶劣环境下,可以使用防水、防腐蚀护套保护板。
3. 操作员培训船员应接受专业培训,掌握自动操舵操作技巧及规程。
结束语型船舶自动操舵仪广泛应用于各种船舶中,便于控制和管理船只,提高了船只的安全性和经济效益。
在使用时,要严格遵守规程,正确操作自动操舵仪,并保养好设备,以保障船员和船舶的安全和正常运行。
1引言对于船舶而言,要使其能在航线上稳定而安全的运行,那么则需要保证自动操舵仪能够正常工作。
实际上,其中舵机震荡带来的问题的发生频次最高。
在我国,船舵制造行业在近几十年来已经发展得较为成熟,特别是小型船舶,年制造数量非常惊人,并且性能相当可靠。
因此,我国自主制造的船舶自动操舵仪完全符合国际主流水平。
笔者将对自动操舵仪这一部件进行一些简单介绍,继而重点针对船舶自动操舵仪的常见故障提出故障诊断与检测方案,旨在通过有益的探讨不断丰富船舶控制技术经验,为提高船舶的自动控制水平建言献策。
2船舶自动操舵仪工作原理常规自动操舵通常是指用电罗经或磁罗经检测航向偏差,在通过航向控制器进行舵角操纵,达到航向纠偏。
罗经对船舶实际的航行方向进行实时把控,我们由此可以了解船舶的航行是否存在方向误差以及多大的误差,得到信号数据之后,自动操舵仪可以直接对转动舵进行控制,以此来调整航行方向。
对于自动操舵仪而言,目前一般存在两种主要的操作方式,它们分别是手动与自动。
当船只是在大海中运行时,一般自动操舵的工作方案比较完善,这种能够大大提高航行方向不出现错误,由此可以减轻工作人员的工作强度并且避免不必要的资源浪费。
而如果船只需要在港湾转向时,这种情况下人工操舵更加灵活,另外当海面上能见度较低之时也不宜采用自动操舵方案。
笔者绘制了图一以表示自动操舵仪的工作方案。
首先,操舵仪可以接受指令,对舵机实施控制以达到让其一直保持在正确航线上。
当前,一些性能较强的操舵仪的精度控制范围相比于人工控制显得更具优势,几乎不会发生偏航的问题,这对于航程的行进与资源的合理调配都是非常友好的。
用于海洋船舶的操舵仪操舵范围应为±35°,用于内河船舶的操舵范围应为±40°。
自动操舵有两种工况:一种是自动稳定航向;另一种是改变航向。
对于平常的自动舵而言,它只能做到保持不变的方向行进的功能,而如果是航迹舵,则能够根据实际情况对航行方向进行调整。