机械原理 第2章 作业
- 格式:ppt
- 大小:663.00 KB
- 文档页数:6
一. 单选题(共20题,共80分)1. 设计凸轮机构时,()运动规律存在刚性冲击。
(4分)A.简谐B.等速C.正弦加速度★标准答案:B☆考生答案:★考生得分:0 分评语:2. 若铰链四杆机构满足杆长条件,使机构成为双摇杆机构,则()。
(4分)A.固定最短杆B.固定最长杆C.固定最短杆的对边★标准答案:C☆考生答案:★考生得分:0 分评语:3. 在尖顶推杆盘型凸轮机构中,若将原来的尖顶推杆换成滚子推杆,则()。
(4分)A.推杆的运动发生改变B.推杆的运动不变C.凸轮磨损加剧★标准答案:B☆考生答案:★考生得分:0 分评语:4. 曲柄为原动件的偏置曲柄滑块机构,当滑块的传动角最小时,则()。
(4分)A.曲柄与导路平行B.曲柄与导路垂直C.曲柄与连杆垂直★标准答案:B☆考生答案:★考生得分:0 分评语:5. 曲柄滑块机构的行程速比系数为()。
(4分)A.B.或C.★标准答案:B☆考生答案:★考生得分:0 分评语:6. 偏心轮机构是这样由铰链四杆机构演化而来的()。
(4分)A.扩大转动副B.取不同的构件为机架C.化转动副为移动副★标准答案:A☆考生答案:★考生得分:0 分评语:7. 以对心曲柄滑块机构的曲柄为机架时,得到的是()。
(4分)A.导杆机构B.摇块机构C.直动滑杆机构★标准答案:A☆考生答案:★考生得分:0 分评语:8. 下面那种情况下,存在死点()。
(4分)A.对心曲柄滑块机构,曲柄主动B.曲柄摇杆机构,曲柄主动C.曲柄摇杆机构,摇杆主动★标准答案:C☆考生答案:★考生得分:0 分评语:9. 机构的最小传动角可能发生在()位置之处。
(4分)A.主动曲柄与连杆二次共线B.主动曲柄与机架二次共线C.主动曲柄与摇杆二次共线★标准答案:B☆考生答案:★考生得分:0 分评语:10. 四杆机构处于死点时,其传动角为()。
(4分)A.B.★标准答案:A☆考生答案:★考生得分:0 分评语:11. 平面连杆机构的行程速比系数K可能的取值范围()。
第二章机构的结构分析-一、填空与选择题1、B、A2、由两构件直接接触而产生的具有某种相对运动3、低副,高副,2,14、后者有作为机架的固定构件5、自由度的数目等于原动件的数目;运动不确定或机构被破坏6、√7、8、m-19、受力情况10、原动件、机架、若干个基本杆组11、A、B 12、C 13、C二、绘制机构简图1、计算自由度n=7, P L=9,P H=2 F=3n-2P L-P H=3×7-2×9-2=12、3、 4、三、自由度计算(a)E处为局部自由度;F处(或G处)为虚约束计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(b)E处(或F处)为虚约束计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(c) B处为局部自由度;F处为复合铰链;J处(或K处)为虚约束计算自由度n=9,P L=12,P H=2 F=3n-2P L-P H=3×9-2×12-2=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(d) B处为局部自由度;C处为复合铰链;G处(或I处)为虚约束计算自由度n=7,P L=9,P H=1 F=3n-2P L-P H=3×7-2×9-1=2自由度的数目大于原动件的数目所以该机构不具有确定的运动。
(e) 构件CD(或EF)及其两端的转动副引入一个虚约束计算自由度n=3,P L=4,P H=0 F=3n-2P L-P H=3×3-2×4=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(f) C处为复合铰链;计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
大工20秋《机械原理》在线作业2齿轮机构是由()组成的一种高副机构。
选项【A】:主动齿轮
选项【B】:从动齿轮
选项【C】:机架
选项【D】:以上选项均不正确
正确选项:A,B,C
圆形平面齿轮机构按齿形分可分为()。
选项【A】:直齿
选项【B】:斜齿
选项【C】:人字齿
选项【D】:曲齿
正确选项:A,B,C
圆形空间齿轮机构按齿形分可分为()。
选项【A】:直齿
选项【B】:斜齿
选项【C】:人字齿
选项【D】:曲齿
正确选项:A,B,D
按照轮齿在圆柱体上排列方向的不同,平面齿轮机构可分为()。
选项【A】:直齿圆柱齿轮机构
选项【B】:平行轴斜齿圆柱齿轮机构
选项【C】:人字齿齿轮机构
选项【D】:曲线齿圆柱齿轮机构
正确选项:A,B,C,D
产生根切的齿轮的特点是()。
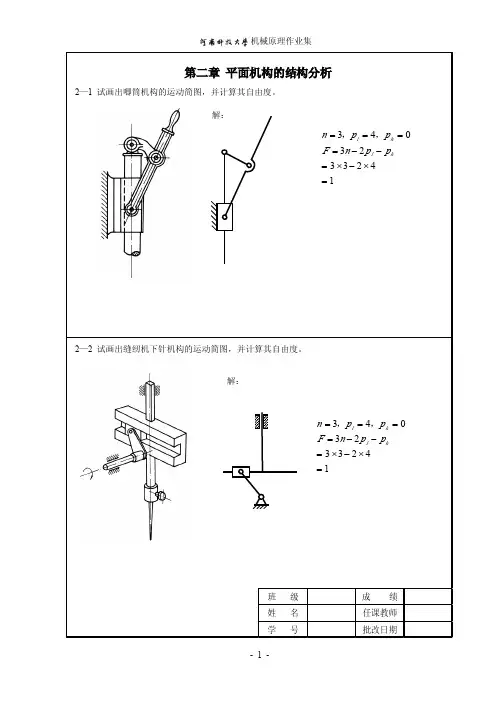
机械原理习题2013.02第2章平面机构的结构分析2-1 绘制图示机构的运动简图。
(a) (b)题2-1图2-2 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
ABCDE(a)ABDCE(b)ABCDE(c)(e)(f)题2-2图2-3 计算刹车机构在刹车过程中的自由度。
H(g)题2-3图2-4计算图示机构的自由度,并判断机构运动是否确定。
若存在复合铰链、局部自由度或虚约束,请指出。
(a) (b)题2-4图2-5 判断图示机构设计是否正确。
若不正确,提出修改方案。
题2-5图2-6 填空题1)在平面机构中具有一个约束的运动副是 副。
2)使两构件直接接触并能产生一定相对运动的连接称为 。
3)平面机构中的低副有 副和 副两种。
4)机构中的构件可分为三类:固定构件(机架)、原动件(主动件)、 件。
5)在平面机构中若引入一个高副将引入 个约束。
6)在平面机构中若引入一个低副将引入 个约束。
7)在平面机构中具有两个约束的运动副是 副和 副。
2-7 判断题1)具有局部自由度的机构,在计算机构的自由度时,应当首先除去局部自由度。
( )2)具有虚约束的机构,在计算机构的自由度时,应当首先除去虚约束。
()3)虚约束对运动不起作用,因此是多余的。
()4)若两构件之间组成两个导路平行的移动副,在计算自由度时应算作两个移动副。
()5)若两构件之间组成两个轴线重合的转动副,在计算自由度时应算作两个转动副。
()6)六个构件组成同一回转轴线的转动副,则该处共有五个转动副。
()7)当机构的自由度F>0,且等于原动件数,则该机构具有确定的相对运动。
()8)虚约束对机构的运动有限制作用。
()2-8 选择题1)机构中的构件是由一个或多个零件所组成,这些零件间()产生相对运动。
A. 可以B. 不能C. 不一定能2)原动件的自由度应为()。
A. 0B. 1C. 23)在机构中原动件数目()机构的自由度数且大于0时,该机构具有确定的运动。
机械原理作业集(第2版)参考答案(注:由于作图误差,图解法的答案仅供参考)第一章绪论1-1~1-2略第二章平面机构的结构分析2-12-22-3 F=1 2-4 F=1 2-5 F=1 2-6 F=12-7 F=0机构不能运动。
2-8 F=1 2-9 F=1 2-10 F=1 2-11 F=22-12 F=12-13 F=1 2为原动件,为II级机构。
8为原动件,为III级机构。
2-14 F=1,III级机构。
2-15 F=1,II级机构。
2-16 F=1,II级机构。
F=1,II级机构。
第三章平面机构的运动分析3-13-2(1)转动中心、垂直导路方向的无穷远处、通过接触点的公法线上(2)P ad(3)铰链,矢量方程可解;作组成组成移动副的两活动构件上重合点的运动分析时,如果铰链点不在导路上(4) 、 (5)相等(6) 同一构件上任意三点构成的图形与速度图(或加速度图)中代表该三点绝对速度(或加速度)的矢量端点构成的图形, 一致 ;已知某构件上两点的速度,可方便求出第三点的速度。
(7)由于牵连构件的运动为转动,使得相对速度的方向不断变化。
3-31613361331P P P P=ωω 3-4 略3-5(1)040m /s C v .=(2)0.36m /s E v = (3) ϕ=26°、227° 3-6~3-9 略3-10(a )、(b )存在, (c )、(d )不存在。
3-11~3-16 略 3-17第四章 平面机构的力分析、摩擦及机械的效率4-14-24-3 )sin )((211212l l ll l l f f V +++=θ4-4 F =1430N 4-5~4-9略232/95.110s m v -==ωB v JI v4-10 )2()2(ρρη+-=b a a b4-11 5667.0 31.110==≤ηϕα 4-12 8462.0=η 4-13 605.0=η4-14 2185.0=η N Q 3.10297= 4-15 7848.0113.637==ηN F4-16 KW P 026.88224.0==η 4-17 KW P 53.96296.0==η4-18 ϕα2≤ 4-19 F =140N4-20 ϕαϕ-<<O 90第五章 平面连杆机构及其设计5-15-2(1) 摇杆(尺寸),曲柄(曲柄与连杆组成的转动副尺寸),机架(连杆作为机架) (2) 有,AB ,曲柄摇杆机构 ;AB ;CD 为机架(3) 曲柄 与 机架 (4) 曲柄摇杆机构、曲柄滑块机构、摆动导杆机构 (5) 曲柄摇杆机构、摆动导杆机构;曲柄滑块机构 (6) 等速,为主动件 (7) 7 (8) 往复 ,且 连杆与从动件 (9) 选取新机架、刚化搬移、作垂直平分线;包含待求铰链 且 位置已知 (10) 9 ; 5 5-3 70 < l AD <670 5-4~5-18 略5-19 l AC =150mm l CD =3000mm h =279.9 mm5-20 a =63.923mm b =101.197mm c =101.094mm d =80mm第六章 凸轮机构及其设计6-16-26-3(1)等加速等减速、余弦加速度(2)刚性、柔性(3)理论廓线(4)互为法向等距曲线(5)增大基圆半径、采用正偏置 (6)增大基圆半径、减小滚子半径(7)提高凸轮机构运动的轻巧性和效率、避免加速度过大造成冲击 6-4略 6-56-6 ~ 6-13略 6-146-15 6-16略第七章 齿轮机构及其设计7-1︒==6858.70822rad πδ︒='=︒≡====1803064.3432.1700min max 0δδαααmmh mm r 6332.343776.51240-='='-=δy x6395.185947.4060='-='=δy x7-27-3(1) (2)7-4 z = 41.45 7-5略7-6 (1) (2) 7-7 7-8略 7-9 7-10 7-11略7-12 (1) (2) (3) 7-13(1) (2) (3) 7-14略7-15 7-16略7-17 共有7种方案 7-18~7-19 略 7-20302021==z z mmr mms mm s a b a 0923.1052816.178173.6===634.1=εαmmj mmc mma t 77.269.494.15523.23='='='=α'smm v mm L /490==刀294-==x z 8.04.88==x z 0399.02='x 9899.482234117229.1142444153.44='''=='==K K Kρθα mmr K K 3433.702444='= α8879.22α='mm r mm r 2.618.4021='='mmd z mmm 120304===5.0-=x mms 827.4=058.1-=x7-21 7-22 略7-23正传动, 7-24~7-25 略 7-26(1)正传动(2) 7-27 略 7-287-29 略第八章 齿轮系及其设计8—18—28—3(1)从动轮齿数的连乘积除以主动轮齿数的连乘积、数外啮合次数或用画箭头的 (2)用画箭头的(3)有无使行星轮产生复合运动的转臂(系杆) (4)相对运动原理(5)一个或几个中心轮、一个转臂(系杆)、一个或几个行星轮(6)转化轮系中A 轮到B 轮的传动比、周转轮系中A 轮到B 轮的传动比、AB i 可以通过H ABi 求解(7)找出周转轮系中的行星轮、转臂及其中心轮 (8)传动比条件、同心条件、均布装配条件、邻接条件(9)传动比很大结构紧凑效率较低、要求传动比大的传递运动的场合、传动比较小效率较高、传递动力和要求效率较高的场合mm a 5892.90='mm r a 93.581=13.7291β=116.36v z = 2.6934γε=2222(1)175(2)185163(3) 5.7106(4)112.5a f d mm d mm d mma mmβ=====(10)差动轮系 8-4 8-58-6 8-7 8-8 8-98-10 8-11 8-12(a ) (b ) 8-13(1) (2) 8-14 z 2≈68 8-15 8-168-17 (1) (2) 8-188-198-20 m in /28.154r n B -=8-21只行星轮满足邻接条件件,只行星轮不满足邻接条34144803mml z H ==8-22 162/108/5463/42/2136/24/12321===z z z第九章 其他常用机构9-1 9-2 9-3 9-4mms 075.0=232==n k mml B 3=8.658=ϕm in/84r n =mm R 975.23=32143211''-=z z z z z z i H m in/3r n H =NF 64.308=5.141-=i 072.016-=i m in /600r n H -=m in/385.15r n H =31=H i 8.11=H i 0=H n min /667.653197min /2min /340042r n r n r n A ≈===m in /47.26r n c =m in/1350r n c -=min /6349.063407r n ≈=4286.0731-≈-=H i .1533.433=i第十章 机械的运转及其速度波动的调节10-110-210-3 2 05.050kgm J Nm M e er =-=10-4222212334111()()e e z z J J J J m m e M M Qe z z =++++=- 10-520.14.20J kg m M Nm ==-10-6 2334.()cos cos ABr G l h J M F G gφφ==- 10-7332.18221857e e J kgm MNm ==10-811100/50/rad s rad s αω==10-9maxmax minmin 30.048140.962/2 39.038/0,2rad s rad s δωφπωφπ=====10-102280.4730.388F FJ kgm J kgm '== 10-1102max max 623.1/min104.1654 2.11329F n r J kgm φ===10-12max max minmin 0.06381031.916/min 968.08/mine bn r nr δφφφφ===== 10-1326maxmin 302F eb f Nm J kgm ωφωφ==→→第十一章 机械的平衡11-111-211-3 2.109252.66o b b r cm θ==11-412.31068.5273bA bB m kg m kg==11-511-611-711-8)(2)(2 , )b )( )( , )a ⅡⅡ ⅠⅠ ⅡⅡ ⅠⅠ 上下动不平衡静平衡上下动不平衡静平衡mrr m mr r m mr r m mr r m b b b b b b b b ====oⅡb Ⅱo b Ⅰgm W W W 90 84.08419 gm 0628.1Ⅱb 3Ⅰb ==='==θθ0B 0A 120 285.0 8584.260 285.0 8584.2======bA bB bA bA kg m kgmm W kg m kgmm W θθ0Ⅱb 0Ⅰb 147 725.0 290316 65.1 660======b Ⅱb Ⅱb Ⅰb Ⅰkg m kgmm W kg m kgmm W θθ。
机械原理习题答案篇一:机械原理_课后习题答案第七版《机械原理》作业题解第二章机构的构造分析F=3n-2pl-ph =3×-2×-1=0 34 F = 3n ? (2pl + ph )= 3 ×4 ? (2 ×5 + 1) = 17 438 5 2 9 1-1' F = 3n ?(2pl + ph ? p') ? F'= 3 ×8 ? (2 ×10 + 2 ? 0) ?1= 1篇二:机械原理第七版西北工业大学习题答案(特别全答案详解).doc第二章平面机构的构造分析题2-1 图a所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以到达冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构管此机构有4个活动件,但齿轮1和凸轮2是固装能作为一个活动件,故n?3 pl?3 ph?1F?3n?2pl?ph?3?3?2?4?1?0的自由度。
尽在轴A上,只原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B、C、D组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b)(c)所示,这样就相当于给机构增加了一个自由度。
(一) 单选题1.凸轮机构中,下列描述正确的是()。
(A) 基圆越大,压力角越大(B) 基圆越大,压力角越小(C) 压力角越小,基圆越小参考答案:(B)2.在设计铰链四杆机构时,应使最小传动角()。
(A) 尽可能大一些(B) 尽可能小一些(C) 为0参考答案:(A)3.能反映急回特性显著程度的角是平面四杆机构的()。
(A) 压力角(B) 传动角(C) 极位夹角参考答案:(C)4.在满足杆长条件的四杆机构中,取()杆作为机架,则可得到双摇杆机构。
(A) 最短杆(B) 最短杆的对边(C) 最长杆参考答案:(B)5.机构的最小传动角可能发生在()位置之处。
(A) 主动曲柄与连杆二次共线(B) 主动曲柄与机架二次共线(C) 主动曲柄与摇杆二次共线参考答案:(B)6.偏心轮机构是这样由铰链四杆机构演化而来的()。
(A) 扩大转动副(B) 取不同的构件为机架(C) 化转动副为移动副参考答案:(A)7.若铰链四杆机构满足杆长条件,使机构成为双摇杆机构,则()。
(A) 固定最短杆(B) 固定最长杆(C) 固定最短杆的对边参考答案:(C)8.机构传力性能的好坏不能用()来衡量。
(A) 压力角(B) 极位夹角(C) 传动角参考答案:(B)9.设计凸轮机构时,()运动规律存在刚性冲击。
(A) 简谐(B) 等速(C) 正弦加速度参考答案:(B)10.以下四杆机构中,没有急回特性的是()。
(A) 平行四边形机构(B) 摆动导杆机构(C) 偏置曲柄滑块机构参考答案:(A)11.下面那种情况下,存在死点()。
(A) 对心曲柄滑块机构,曲柄主动(B) 曲柄摇杆机构,曲柄主动(C) 曲柄摇杆机构,摇杆主动参考答案:(C)12.摆动导杆机构的传动角为()。
(A)(B)(C)参考答案:(B)13.铰链四杆机构曲柄存在的条件是()。
(A) 最短杆与最长杆长度之和其他两杆长度之和(B) 最短杆与最长杆长度之和其他两杆长度之和,且固定最短杆的邻边(C) 最短杆与最长杆长度之和其他两杆长度之和,且固定最短杆或最短杆的邻边参考答案:(C)14.通常,可适当增大凸轮()的方法来减小凸轮的运动失真现象。
第二章机构的结构分析作业题:1.图示为一简易冲床的初拟方案。
设计思路是:动力由齿轮1输入,轴A连续转动,固联与轴A上的凸轮推动杠杆3使冲头4上下往复运动实现冲压工艺,试绘出其机构运动简图,分析能否实现上述构思,并提出两种修改意见(以机构运动简图表示)。
2.如图所示为一小型压力机。
图中齿轮1与偏心轮1ˊ为同一构件,绕固定轴心O连续转动。
在齿轮5上开有凸轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕轴C上下摆动;同时又通过偏心轮1ˊ、连杆2、滑槽3使C轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G使冲头8实现冲压运动。
试绘制其机构运动简图,计算其自由度。
3.图示是一为高位截肢的人所设计的一种假肢膝关节机构。
该机构能保持人行走的稳定性。
若以胫骨1为机架,试绘制其机构运动简图和计算其自由度,并作出大腿弯曲90°时的机构运动简图。
4.试绘出下列各机构的机构示意图,计算其自由度,并说明运动是否确定。
5.计算下列各机构的自由度,若存在复合铰链,局部自由度,虚约束请明确指出。
6.计算图示机构的自由度,并分析基本杆组,确定机构的级别。
第八章平面连杆机构及其设计作业题:1.图示四杆机构中各杆件长度已知:a=150mm,b=500mm,c=300mm,d=400mm。
试问:1)若取杆件d 为机架是否存在曲柄?如存在,哪一杆件为曲柄?2)若分别取其它杆件为机架,可得到什么类型的机构?2.图示铰链四杆机构ABCD中,各构件长度如图所示(μl=10mm/mm),AB主动,试求:1)两连架杆AB、CD为何类构件?2)该机构有无急回性质?若有,其行程速比系数K为多少?3)在图中作出最小传动角γmin对应的机构位置ABCD;4)若改为以CD杆为主动,该机构有无死点?若有,请用虚线画出死点位置。
3.图示铰链四杆机构作为加热炉炉门的启闭机构。
炉门上两铰链相距50cm(图中单位为:cm),炉门打开后成水平位置且要求外侧向上,固定铰链装在yy轴线上,相应位置尺寸如图。
机械原理大作业(二) 作业名称:机械原理设计题目:凸轮机构设计院系: 机电工程学院班级:设计者:学号:指导教师:丁刚陈明设计时间:哈尔滨工业大学机械设计1、设计题目如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。
表一:凸轮机构原始参数序号升程(mm) 升程运动角(º)升程运动规律升程许用压力角(º)回程运动角(º)回程运动规律回程许用压力角(º)远休止角(º)近休止角(º)12 80 150正弦加速度30 100 正弦加速度60 60 502、凸轮推杆运动规律(1)推杆升程运动方程S=h[φ/Φ0-sin(2πφ/Φ0)]V=hω1/Φ0[1-cos(2πφ/Φ0)]a=2πhω12sin(2πφ/Φ0)/Φ02式中:h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算)(2)推杆回程运动方程S=h[1-T/Φ1+sin(2πT/Φ1)/2π]V= -hω1/Φ1[1-cos(2πT/Φ1)]a=-2πhω12sin(2πT/Φ1)/Φ12式中:h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/63、运动线图及凸轮线图运动线图:用Matlab编程所得源程序如下:t=0:pi/500:2*pi;w1=1;h=150;leng=length(t);for m=1:leng;if t(m)<=5*pi/6S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi));v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6);a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6));% 求退程位移,速度,加速度elseift(m)<=7*pi/6S(m)=h;v(m)=0;a(m)=0;% 求远休止位移,速度,加速度elseif t(m)<=31*pi/18T(m)=t(m)-21*pi/18;S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi));v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9)));a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9));%求回程位移,速度,加速度elseS(m)=0;v(m)=0;a(m)=0;% 求近休止位移,速度,加速度endend推杆位移图推杆速度图推杆加速度图4、确定凸轮基圆半径与偏距在凸轮机构得ds/dφ-s线图里再作斜直线Dt dt与升程得[ds/dφ-s(φ)]曲线相切并使与纵坐标夹角为升程许用压力角[α],则D t d t线得右下方为选择凸轮轴心得许用区。