数字图像处理(冈萨雷斯第三版)
- 格式:ppt
- 大小:2.86 MB
- 文档页数:133
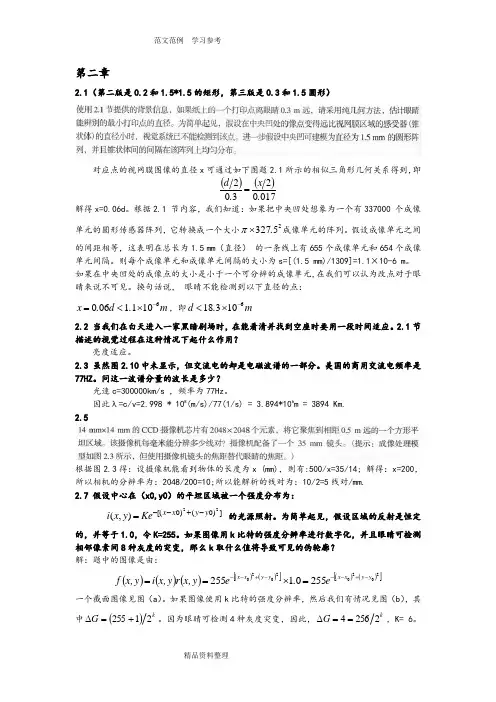
第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。
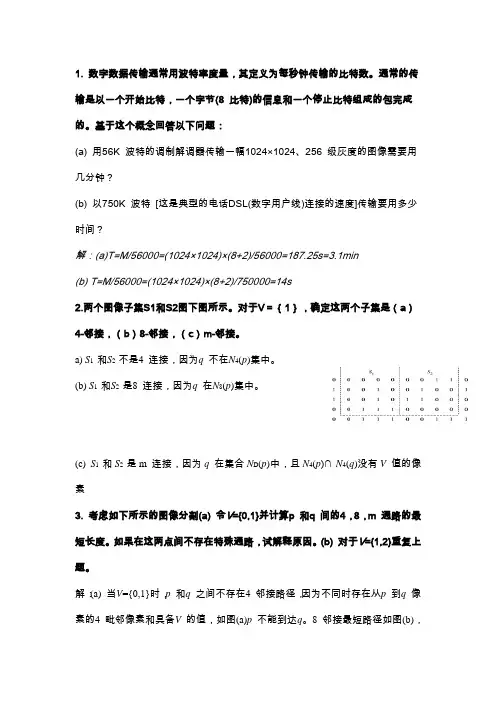
1. 数字数据传输通常用波特率度量,其定义为每秒钟传输的比特数。
通常的传输是以一个开始比特,一个字节(8 比特)的信息和一个停止比特组成的包完成的。
基于这个概念回答以下问题:(a) 用56K 波特的调制解调器传输一幅1024×1024、256 级灰度的图像需要用几分钟?(b) 以750K 波特[这是典型的电话DSL(数字用户线)连接的速度]传输要用多少时间?解:(a)T=M/56000=(1024×1024)×(8+2)/56000=187.25s=3.1min(b) T=M/56000=(1024×1024)×(8+2)/750000=14s2.两个图像子集S1和S2图下图所示。
对于V={1},确定这两个子集是(a)4-邻接,(b)8-邻接,(c)m-邻接。
a) S1 和S2 不是4 连接,因为q 不在N4(p)集中。
(b) S1 和S2 是8 连接,因为q 在N8(p)集中。
(c) S1 和S2 是m 连接,因为q 在集合N D(p)中,且N4(p)∩ N4(q)没有V 值的像素3. 考虑如下所示的图像分割(a) 令V={0,1}并计算p 和q 间的4,8,m 通路的最短长度。
如果在这两点间不存在特殊通路,试解释原因。
(b) 对于V={1,2}重复上题。
解:(a) 当V={0,1}时,p 和q 之间不存在4 邻接路径,因为不同时存在从p 到q 像素的4 毗邻像素和具备V 的值,如图(a)p 不能到达q。
8 邻接最短路径如图(b),最短长度为4。
m邻接路径如图(b)虚线箭头所示,最短长度为5。
这两种最短长度路径在此例中均具有唯一性。
(b) 当V={1, 2}时,最短的4 邻接通路的一种情况如图(c)所示,其长度为6,另一种情况,其长度也为6;8 邻接通路的一种情况如图(d)实线箭头所示,其最短长度为4;m 邻接通路的一种情况如图(d)虚线箭头所示,其最短长度为6.或解: (1) 在V={0,1}时,p和q之间通路的D4距离为∞,D8距离为4,Dm距离为5。
第二章(第二版是和*的矩形,第三版是和圆形)对应点的视网膜图像的直径x 可通过如下图题所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=。
根据 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
节描述的视觉过程在这种情况下起什么作用?亮度适应。
虽然图中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v= * 108(m/s)/77(1/s) = *106m = 3894 Km.根据图得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于,令K=255。
如果图像用k 比特的强度分辨率进行数字化,并且眼睛可检测相邻像素间8种灰度的突变,那么k 取什么值将导致可见的伪轮廓? 解:题中的图像是由:()()()()()[]()()[]20202020********y y x x y y x x e .e y ,x r y ,x i y ,x f -+---+--=⨯==一个截面图像见图(a )。
第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。
第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。
数字图像处理课件(冈萨雷斯第三版)复习材料(1) 名词解释RGB Red Green Blue,红绿蓝三原色CMYK Cyan Magenta yellow blacK , 用于印刷的四分色HIS Horizontal Situation Indicator 水平位置指示器FFT Fast Fourier Transform Algorithm (method) 快速傅氏变换算法CWT continuous wavelet transform 连续小波变换DCT D iscrete Cosine Transform 离散余弦变换DWT DiscreteWaveletTransform 离散小波变换CCD Charge Coupled Device 电荷耦合装置Pixel: a digital image is composed of a finite number of elements,each of which hasa particular lication and value,theseelements are called pixel 像素DC component in frequency domain 频域直流分量GLH Gray Level Histogram 灰度直方图Mather(basic)wavelet:a function (wave) used to generate a set of wavelets, 母小波,用于产生小波变换所需的一序列子小波Basis functions basis image 基函数基图像Multi-scale analysis 多尺度分析Gaussian function 高斯函数sharpening filter 锐化滤波器Smoothing filter/convolution 平滑滤波器/卷积Image enhancement /image restoration 图像增强和图像恢复(2)问答题1. Cite one example of digital imageprocessingAnswer: In the domain of medical image processing we may need to inspect a certain class of images generated by an electron microscope to eliminate bright, isolated dots that are no interest.2.Cite one example of frequency domain operation from the following processing result, make a general comment about ideal highpass filter (figure B) and Gaussian highpass filter(figure D)A.Original imageB.ideal highpass filterIn contrast to the ideal low pass filter, it is to let all the signals above the cutoff frequency fc without loss, and to make all the signals below the cutoff frequency of FC without loss of.C.the result of ideal highpass filterD.Gaussian highpass filterHigh pass filter, also known as "low resistance filter", it is an inhibitory spectrum of the low frequency signal and retain high frequency signal model (or device). High pass filter can make the high frequency components, while the high-frequency part of the frequency in the image of the sharpThe law of sampling process should be followed, also called the sampling theorem and the sampling theorem. The sampling theorem shows the relationship between the sampling frequency and the signal spectrum, and it is the basic basis of the continuous signal discretization. In analog / digital signal conversion process, when the sampling frequency fs.max greater than 2 times the highest frequency present in the signal Fmax fs.max>2fmax, sampling digital signal completely retained the information in the original signal, the general practical application assurance sampling frequency is 5 ~ 10 times higher than that of the signal of the high frequency; sampling theorem, also known as the Nyquist theorem6.A mean filter is a linear filter but a median filter is not, why?Mean filter is a typical linear filtering algorithm, it is to point to in the target pixels in the image to a template, this template including its surrounding adjacent pixels and the pixels in itself.To use in the template to replace all the pixels of average pixel values.Linear filter, median filter, also known as the main method used in the bounded domain average method.Median filter is a kind of commonly used nonlinear smoothing filter and its basic principle is to put the little value in a digital image or sequence to use value at various points in the field of a point at which the value to replace, its main function is to let the surrounding pixel gray value differences between larger pixel change with the surrounding pixels value close to the values, which can eliminate the noise of the isolated points, so median filter to filter out the salt and pepper noise image is very effective.(3)算法题1.The following matrix A is a 3*3 image and B is 3*3 Laplacian mask, what will be the resulting image? (Note that the elements beyond the border remain unchanged)2.Develop an algorithm to obtain the processing result B from original image A3.Develop an algorithm which computes the pseudocolor image processing by means of fourier tramsformAnswer:The steps of the process are as follow:(1) Multiply the input image f(x,y) by (-1)x+y to center the transform;(2) Compute the DFT of the image from (1) to get power spectrum F(u,v) of Fourier transform.(3) Multiply by a filter functionh(u,v) .(4) Compute the inverse DFT of the result in (3).(5) Obtain the real part of the result in (4).(6) Multiply the result in (5) by(-1)x+y4.Develop an algorithm to generate approximation image series shown in the following figure b** means of down sampling.(4)编程题There are two satellite photos of night asblew.Write a program with MATLAB totell which is brighterAn 8*8 image f(i,i) has gray levels givenby the following equation:f(i,i)=|i-j|, i,j=0,1 (7)Write a program to find the outputimage obtained by applying a 3*3 medianfilter on the image f(i,j) ;note that theborder pixels remain unchanged.Answer:1.Design an adaptive local noise reduction filter and apply it to an image with Gaussian noise. Compare the performance of the adaptive local noise reduction filter with arithmetic mean and geometric mean filter.Answer:clearclose all;rt=imread('E:\数字图像处理\yy.bmp');gray=rgb2gray(rt);subplot(2,3,1);imshow(rt);title('原图像') ;subplot(2,3,2);imshow(gray);title('原灰度图像') ;rtg=im2double(gray);rtg=imnoise(rtg,'gaussian',0,0.005)%加入均值为0,方差为0.005的高斯噪声subplot(2,3,3);imshow(rtg);title('高噪点处理后的图像');[a,b]=size(rtg);n=3;smax=7;nrt=zeros(a+(smax-1),b+(smax-1));for i=((smax-1)/2+1):(a+(smax-1)/2)for j=((smax-1)/2+1):(b+(smax-1)/2)nrt(i,j)=rtg(i-(smax-1)/2,j-(smax-1)/2);endendfigure;imshow(nrt);title('扩充后的图像');nrt2=zeros(a,b);for i=n+1:a+nfor j=n+1:b+nfor m1=3:2m2=(m1-1)/2;c=nrt2(i-m2:i+m2,j-m2:j+m2);%使用7*7的滤波器Zmed=median(median(c));Zmin=min(min(c));Zmax=max(max(c));A1=Zmed-Zmin;A2=Zmed-Zmax;if(A1>0&&A2<0)B1=nrt2(i,j)-Zmin;B2=nrt2(i,j)-Zmax;if(B1>0&&B2<0)nrt2(i,j)= nrt2(i,j);elsenrt2(i,j)=Zmed;endcontinue;endendendendnrt3=im2uint8(nrt2);figure;imshow(nrt3);title('自适应中值滤波图');2.Implement Wiener filter with “wiener2” function of MatLab to an image with Gaussian noise and compare the performance with adaptive local noise reduction filter.代码如下:>> I=imread('E:\数字图像处理\yy.bmp');>>J=rgb2gray(I);>>K = imnoise(J,'gaussian',0,0.005);>>L=wiener2(K,[5 5]);>>subplot(1,2,1);imshow(K);title('高噪点处理后的图像');>>subplot(1,2,2);imshow(L);title('维纳滤波器处理后的图像');3. Image smoothing with arithmetic averaging filter (spatial convolution).图像平滑与算术平均滤波(空间卷积)。
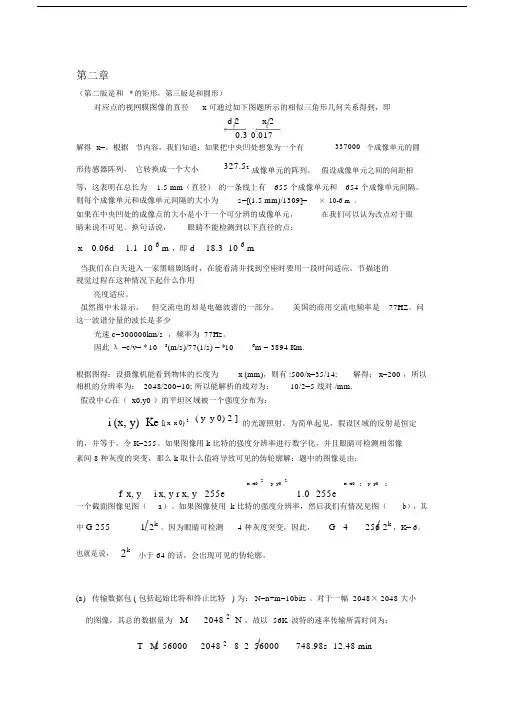
第二章(第二版是和* 的矩形,第三版是和圆形)对应点的视网膜图像的直径x 可通过如下图题所示的相似三角形几何关系得到,即d 2 x 20.30.017解得x=。
根据节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小327.52 成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为 1.5 mm(直径)的一条线上有655 个成像单元和654 个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=× 10-6 m。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说,眼睛不能检测到以下直径的点:x 0.06d 1.1 10 6 m ,即 d 18.3 10 6 m当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
节描述的视觉过程在这种情况下起什么作用亮度适应。
虽然图中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是 77HZ。
问这一波谱分量的波长是多少光速 c=300000km/s ,频率为 77Hz。
因此λ =c/v= * 10 8(m/s)/77(1/s) = *10 6m = 3894 Km.根据图得:设摄像机能看到物体的长度为x (mm),则有 :500/x=35/14; 解得: x=200 ,所以相机的分辨率为: 2048/200=10; 所以能解析的线对为:10/2=5 线对 /mm.假设中心在( x0,y0 )的平坦区域被一个强度分布为:i (x, y) Ke [( x x 0) 2 ( y y 0) 2 ] 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于,令 K=255。
如果图像用 k 比特的强度分辨率进行数字化,并且眼睛可检测相邻像素间 8 种灰度的突变,那么 k 取什么值将导致可见的伪轮廓解:题中的图像是由:f x, y i x, y r x, y 255e x x02 y y0 2255ex x0 2 y y0 21.0一个截面图像见图(a)。
For personal use only in study and research; not for commercial use 第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
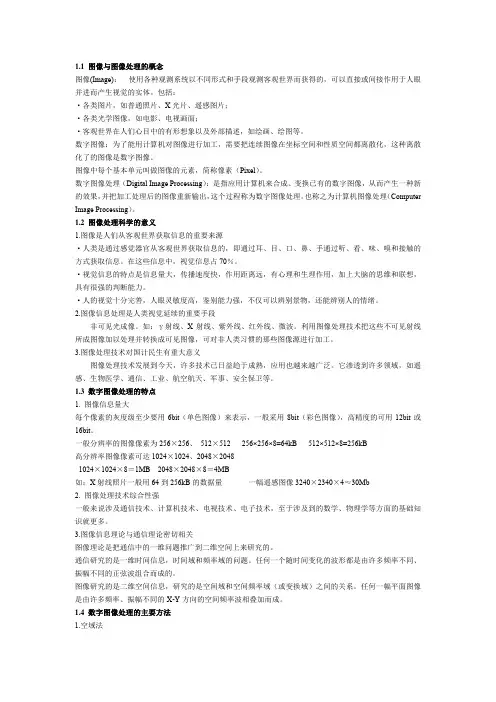
第二章2.1 (第二版是0.2和1.5*1.5 的矩形,第三版是0.3和1.5圆形)节提{ftKrtHE砸,如昭上的一t打印点离眼睛03 m远请采用纯几何方法,估计能辨别朋最小打印点的首律为制单起见.像设在中央RI处的像点变得远比视网JB区储的感受界(辭狀休)的虫赴小吮祀蛍砂U不能陶!倒陽坟丸亦说i划映凹町建悭为直泾为1.5 .uni的逊I形阵列.井且锥状1点间的阿隔住该评列匕均匀分命对应点的视网膜图像的直径x可通过如下图题 2.1所示的相似三角形几何关系得到,即d 2 x 2,* j0.3 0.017解得x=0.06d。
根据2.1节容,我们知道:如果把中央凹处想象为一个有337000 个成像2单元的圆形传感器阵列,它转换成一个大小327.5成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为 1.5 mm (直径)的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1 x 10-6 m。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说,眼睛不能检测到以下直径的点:x 0.06d 1.1 10 6m,即d 18.3 10 6m2.2当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz。
因此X=c/v=2.998 * 10 8(m/s)/77(1 ⑸=3.894*10 6m = 3894 Km.2.514 lum的€€0扭像札t:片百工(M牧20朋个兀索.将立枭化對相距0話m远的一个方形样卅凶域该撮橹机徘呈米陡分辨务少线讨?摄偉机配齐「一牛算mm检头(提示:磺憎处理模23所不.但使用摄掠叽瞬头加魚距瞽代眼昭的焦矩)根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200 ,所以相机的分辨率为:2048/200=10; 所以能解析的线对为:10/2=5 线对/mm.2.7假设中心在(x0,y0 )的平坦区域被一个强度分布为:2 2i (x, y) Ke [(x x0)(y y0)]的光源照射。
数字图像处理第三版中文答案解析引言《数字图像处理》是一本经典的图像处理教材,目前已经出版了第三版。
本文是对该书答案解析的总结,将分析和解释书中的问题和答案。
目录•第一章:绪论•第二章:数字图像基础•第三章:灰度变换•第四章:空间滤波•第五章:频域滤波•第六章:图像复原•第七章:几何校正•第八章:彩色图像处理•第九章:小波与多分辨率处理第一章:绪论本章主要介绍了数字图像处理的概念和基本步骤。
答案解析中包括对一些基本概念和术语的解释,以及相关的数学公式和图像处理方法的应用。
第二章:数字图像基础本章介绍了数字图像的表示和存储方法,以及图像的采样和量化过程。
答案解析中详细解释了图像的像素值和灰度级之间的关系,以及采样频率和量化步长对图像质量的影响。
第三章:灰度变换本章讲述了图像的灰度变换方法,包括线性和非线性变换。
答案解析中对不同灰度变换函数的作用和效果进行了解释,并给出了一些实例和应用。
第四章:空间滤波本章介绍了图像的空间滤波方法,包括平滑和锐化滤波。
答案解析中解释了不同滤波器的原理和效果,并给出了滤波器设计的步骤和实例。
第五章:频域滤波本章讲述了图像的频域滤波方法,包括傅里叶变换和滤波器设计。
答案解析中详细解释了傅里叶变换的原理和应用,以及频域滤波器的设计方法和实例。
第六章:图像复原本章介绍了图像的复原方法,包括退化模型和复原滤波。
答案解析中详细解释了退化模型的建立和复原滤波器的设计方法,以及如何根据退化模型进行图像复原的实例。
第七章:几何校正本章讲述了图像的几何校正方法,包括图像的旋转、缩放和平移等操作。
答案解析中给出了不同几何变换的矩阵表示和变换规则,以及几何校正的应用实例。
第八章:彩色图像处理本章介绍了彩色图像的表示和处理方法,包括RGB和HSV 等颜色模型的转换和处理。
答案解析中详细解释了不同颜色模型的表示和转换方法,以及彩色图像处理的实例和应用。
第九章:小波与多分辨率处理本章讲述了小波和多分辨率处理的方法和应用。
第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。
第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d = 解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm.2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为: ])0()0[(22),(y y x x Key x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。