电子罗盘的倾斜及罗差补偿算法研究
- 格式:pdf
- 大小:223.87 KB
- 文档页数:3
1.地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或者Gauss (1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
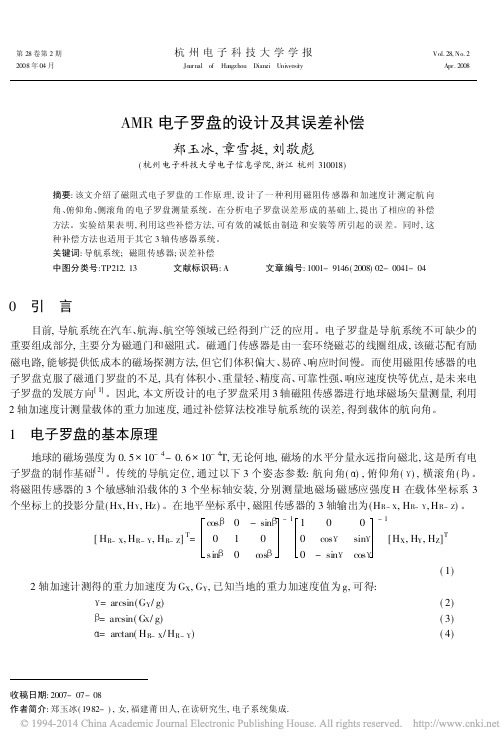
图1地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0º-360º之间变化。
2.倾斜补偿通常电子罗盘并不是保持绝对水平的,它和水平面有一个夹角。
这个夹角会影响航向角的精度,需要通过加速度传感器进行倾斜补偿。
对于一个物体在空中的姿态,如图3所示,Pitch(Φ)定义为x轴和水平面的夹角,图示方向为正方向;Roll(θ)定义为y轴和水平面的夹角,图示方向为正方向。
由Pitch角引起的航向角的误差如图4所示。
可以看出,在x轴方向10度的倾斜角就可以引起航向角最大7-8度的误差。
图3Pitch角和Roll角定义图4Pitch角引起的航向角误差电子罗盘在空中的倾斜姿态如图5所示,通过3轴加速度传感器检测出三个轴上重力加速度的分量,再通过式2可以计算出Pitch和Roll。
图5手机在空中的倾斜姿态3.电子罗盘方案介绍一个三维电子罗盘系统至少需要一个三轴的磁力计以测量磁场数据,一个三轴加速计以测量罗盘倾角,通过信号调理和数据采集部分将三维空间中的重力分布和磁场数据传送给处理器。
第28卷第2期杭州电子科技大学学报Vol.28,No.2 2008年04月Jo urnal of Ha ngzhou Dianzi Uni versi ty Apr.2008AMR 电子罗盘的设计及其误差补偿郑玉冰,章雪挺,刘敬彪(杭州电子科技大学电子信息学院,浙江杭州310018)收稿日期:2007-07-08作者简介:郑玉冰(1982-),女,福建莆田人,在读研究生,电子系统集成.摘要:该文介绍了磁阻式电子罗盘的工作原理,设计了一种利用磁阻传感器和加速度计测定航向角、俯仰角、侧滚角的电子罗盘测量系统。
在分析电子罗盘误差形成的基础上,提出了相应的补偿方法。
实验结果表明,利用这些补偿方法,可有效的减低由制造和安装等所引起的误差。
同时,这种补偿方法也适用于其它3轴传感器系统。
关键词:导航系统;磁阻传感器;误差补偿中图分类号:TP212.13 文献标识码:A 文章编号:1001-9146(2008)02-0041-040 引 言目前,导航系统在汽车、航海、航空等领域已经得到广泛的应用。
电子罗盘是导航系统不可缺少的重要组成部分,主要分为磁通门和磁阻式。
磁通门传感器是由一套环绕磁芯的线圈组成,该磁芯配有励磁电路,能够提供低成本的磁场探测方法,但它们体积偏大、易碎、响应时间慢。
而使用磁阻传感器的电子罗盘克服了磁通门罗盘的不足,具有体积小、重量轻、精度高、可靠性强、响应速度快等优点,是未来电子罗盘的发展方向[1]。
因此,本文所设计的电子罗盘采用3轴磁阻传感器进行地球磁场矢量测量,利用2轴加速度计测量载体的重力加速度,通过补偿算法校准导航系统的误差,得到载体的航向角。
1 电子罗盘的基本原理地球的磁场强度为0.5 10-4-0.6 10-4T,无论何地,磁场的水平分量永远指向磁北,这是所有电子罗盘的制作基础[2]。
传统的导航定位,通过以下3个姿态参数:航向角( ),俯仰角( ),横滚角( )。
将磁阻传感器的3个敏感轴沿载体的3个坐标轴安装,分别测量地磁场磁感应强度H 在载体坐标系3个坐标上的投影分量(H X ,H Y ,H Z )。

高精度电子罗盘的误差修正技术研究冯田佳点;孙乾;吕建廷【摘要】常规的数字罗盘受实际工作环境影响很大,输出精度较低,为了使其达到更高精度级别的精度和分辨率,本文全面分析了产生误差的原因,提出了相关的误差补偿算法、进行了仿真,并研制了相应的3轴数字罗盘硬件平台,结果表明可以很大程度上提高罗盘的输出精度和分辨率。
【期刊名称】《科技风》【年(卷),期】2012(000)016【总页数】2页(P8-9)【关键词】电子罗盘;MEMS磁传感器;MEMS加速度计;倾角测量;嵌入式系统【作者】冯田佳点;孙乾;吕建廷【作者单位】华东理工大学,上海市 200237;华东理工大学,上海市 200237;华东理工大学,上海市 200237【正文语种】中文电子罗盘依据地磁场的方向测量指向,同时通过磁传感器感应地球磁场实现测向定位。
地理的两极和地磁场的两极不重合,两者连线之间存在的磁偏角。
且地球磁场的磁力线在地球表面的分布的大小和方向是不同的。
比如在北美,磁力线与地球表面呈70度,这个角叫磁倾角。
在本文所用的三轴磁传感器中,其内部集成了3个惠斯通电桥,它们彼此互相垂直,分别对应直角坐标系中的x、y、z轴。
在通过这3个轴取得初始的磁数据后经过桥偏置补偿、硬铁补偿后,所得数据即可用于3D方程的求解,进而计算航向。
本文所用的三轴磁传感器中对应直角坐标系中的x轴和y轴决定了水平面,z轴垂直于水平面,此处的地磁场Hearth在水平面上的分量Hnorth所指即磁北的方向。
而x轴所指的即当前的方位的正前方,所以我们只需要测出x轴和Hnorth之间的夹角即可以知道当前的方位角α。
上述即为水平状态时电子罗盘的测角原理。
由式1可知我们所测得的方位角只是当前位置和地磁北极之间的夹角。
由于地磁北极和地理北极之间存在磁偏角,故应根据磁偏角相应的加上或减去当前所在方位的磁偏角,得到的才是当前位置真正的方位角。
而地球不同位置的磁偏角不同,应利用GPS接收器来确定当前的位置,从而校正地理位置带来的方位角测量误差。

安徽建筑工业学院毕业设计 (论文)专业通信工程班级 10通信(1)班学生姓名王宇轩学号 10205040238 课题数字罗盘的设计与误差补偿方法的研究——系统总体设计指导教师金勇2014年6月课题名称数字罗盘的设计与误差补偿方法的研究——系统总体设计院系:电子与信息工程学院系别:通信工程姓名:王宇轩学号:10205040238班级:10通信(1)班导师:金勇摘要本文在了解地磁导航的原理、磁罗盘用途的基础上,针对国内外数字罗盘研究开发的现状,采用各向异性磁阻传感器(AMR)、双轴加速度计(MEMS)、结合单片机芯片,研制了一种低成本、高精度基于磁阻技术的具有倾斜补偿功能三维数字罗盘。
本文分析了磁阻效应、磁阻传感器及加速度计的工作原理及输出信号特征,重点介绍了整个系统的工作原理及组成,确定了各项系统指标和主要器件的选型,完成了三维数字罗盘系统的总体设计,论述了系统的硬件电路设计及软件的总体设计思想。
利用该方案设计的三维数字罗盘测量系统,硬件上具有体积小、重量轻、功耗和成本低等特点;软件设计采用模块化设计方法,可修改性强,能根据需要方便地进行修改。
关键词:磁阻传感器双轴加速度计C8051F320 总体设计AbstractBased on understanding of the principle of magnetic navigation and the use of magnetic compass, Knowing the digital compass’s research and development of domestic and foreign, Using anisotropic magnetoresistive sensor (AMR), dual-axis accelerometer (MEMS), combined with single chip, Based on magnetoresistive technology developed a low cost with high accuracy’s three-dimensional digital compass. The paper analyzes the magnetoresistance, magnetoresistive sensor and the accelerometer output signal characteristics of the working principle, Introduce the focus of the whole system works and composition, identified the main components of the system indicators and the selection, complete the three-dimensional digital compass system design are discussed hardware circuit design and software design ideas. This digital compass measurement system, the hardware is small, light weight, power consumption and low cost; software design use the modular design method can be modified and strong, can easily be modified as needed.Keywords:Magnetoresistive sensor Dual-axis accelerometer C8051F320 Overall design目录摘要 .................................................................................................................................. I I 1 引言 . (1)1.1课题背景及意义 (1)1.2研究内容 (1)1.3论文结构 (2)2 数字罗盘的工作原理 (3)2.1数字罗盘测量原理 (3)2.1.1 磁阻效应及磁阻传感器 (3)2.1.2 角度测量与方向计算 (4)2.2系统构成 (5)2.3数字罗盘模块 (5)2.3.1 磁阻传感器 (5)2.3.2 加速度计 (6)2.3.3 运算放大器 (6)2.3.4 微控制器 (7)2.4外围模块 (8)2.4.1 电源模块 (8)2.4.2 各种接口 (8)(1)USB接口 (8)(2)JTAG接口 (8)2.5本章小结 (9)3 系统总体设计 (10)3.1系统方案与设计指标 (10)3.2主要器件选型 (11)3.2.1 主控芯片 (11)3.2.2磁阻传感器 (13)3.2.3 加速度计 (15)3.2.4 放大器 (17)3.2.5 液晶显示模块 (18)3.3本章小结 (19)4 系统硬件设计 (20)4.1罗盘航向测量电路设计 (20)4.1.1核心控制电路的设计 (20)4.1.2数字罗盘电路设计 (20)(1)磁阻传感器电路 (21)(2)加速度计电路 (21)(3)置复位电路 (21)(4)信号放大电路 (22)4.2调试板接口电路设计 (22)4.2.1电源电路及基准电压电路设计 (22)(1)电源电路 (22)(2)基准电压电路 (23)4.2.2调试板接口电路设计 (23)(1)LCD液晶显示接口电路 (23)(2)串口通信电路 (24)4.3本章小结 (25)5 系统软件设计 (26)5.1系统软件设计概述 (26)5.2软件总体流程 (26)5.4本章小结 (27)结论 (28)致谢 (29)参考文献 (30)附录1 系统原理图 (32)附录2 系统PCB图 (33)附录3 主程序 (35)附录4 实物图 (39)1 引言1.1 课题背景及意义地磁导航是一种重要的导航方式,广泛应用于航海、海上平台控制、GPS集成死区推估等方面。
EQUIPMENT TECHNOLOGY中国军转民85电子罗盘目标定位定向方法研究刘伟近年来,通过获取的测量基准利用电子罗盘,开展远距离目标定向定位在相关行业的研究方兴未艾,随着技术日趋成熟,定向定位精度也在不断提高,其研究成果广泛应用到飞行器导航、军用测绘、卫星天线定向等领域,硬件已嵌入到便携式武器装备中。
如美国KVH 公司的C100系列磁通门电子罗盘、PNI 公司的TCM 系列三维电子罗盘、Honeywell 公司研制的HMR 系列磁阻传感器电子罗盘等,其方位测量精度在倾斜45°时仍能达到0.5°以上。
国内对电子罗盘在不同领域的应用也开展了相应的深入研究,如西北某大学将磁通门技术应用于无人机项目;航空某所研制了三轴磁通门捷联式磁罗盘;深圳瑞芬公司的RION 系列电子罗盘,精度达到0.5°;中船总某所弱磁实验室研制的MC 系列电子罗盘已应用在测绘导航装备中。
本文通过分析电子罗盘的工作原理和应用特点,对电子罗盘在定向定位方面的推广应用提出了见解。
一、工作原理电子罗盘通常由三轴磁阻传感器,两轴倾斜传感器组成,并带有A/D 转换电路和微处理器。
图1所示电子罗盘为倾角补偿电子罗盘, 其输出的磁方位角不受载体倾斜的影响,分为传感器模块、信号调理采集模块以及主控制器模块。
三轴磁阻传感器正交安装,测量载体坐标系下地球磁场强度在三个坐标轴的分量HX、HY、HZ,倾角传感器通过敏感重力分量gX、gY 测量罗盘的俯仰角和滚动角,通过坐标转换可得到载体的磁方位角(计算方法见式7~9)。
二、电子罗盘应用特点在远距离目标定向定位中电子罗盘作为快速测量的传感器,主要利用其体积小、重量轻、功耗小、价格低、系统反应时间短,可嵌入到系统或设备内部的优势,与陀螺寻北仪相比,具有系统结构简单、可快速动态测量、抗震抗冲击性能好、架撤方便、动态漂移率低等较为明显的优势。
但是实际使用中,电子罗盘也存在着如下缺点:(1)定向精度低;(2)受外界磁场环境影响大;(3)磁偏角变化较大;(4)为了提高电子罗盘的测量精度,需要在测量前对其进行标定、校准,并对其圆周特性进行补偿等。