AMR电子罗盘的设计及其误差补偿
- 格式:pdf
- 大小:206.52 KB
- 文档页数:4
AndroidST集成传感器方案实现电子罗盘功能电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。
随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
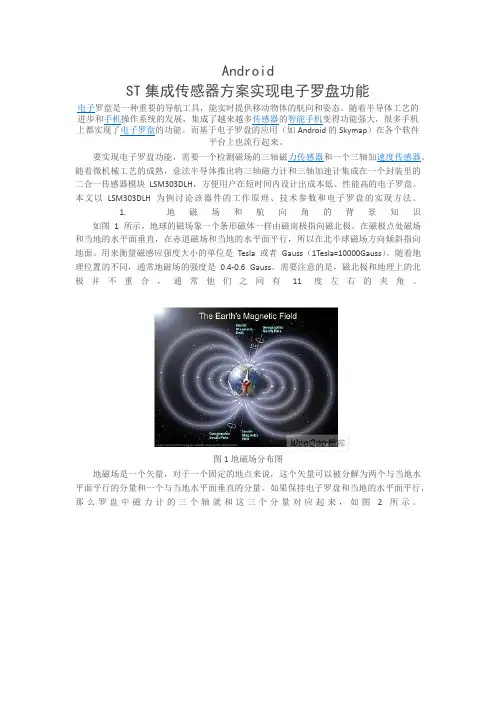
1. 地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
图1 地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0?- 360?之间变化。
2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
高精度电子罗盘的误差修正技术研究冯田佳点;孙乾;吕建廷【摘要】常规的数字罗盘受实际工作环境影响很大,输出精度较低,为了使其达到更高精度级别的精度和分辨率,本文全面分析了产生误差的原因,提出了相关的误差补偿算法、进行了仿真,并研制了相应的3轴数字罗盘硬件平台,结果表明可以很大程度上提高罗盘的输出精度和分辨率。
【期刊名称】《科技风》【年(卷),期】2012(000)016【总页数】2页(P8-9)【关键词】电子罗盘;MEMS磁传感器;MEMS加速度计;倾角测量;嵌入式系统【作者】冯田佳点;孙乾;吕建廷【作者单位】华东理工大学,上海市 200237;华东理工大学,上海市 200237;华东理工大学,上海市 200237【正文语种】中文电子罗盘依据地磁场的方向测量指向,同时通过磁传感器感应地球磁场实现测向定位。
地理的两极和地磁场的两极不重合,两者连线之间存在的磁偏角。
且地球磁场的磁力线在地球表面的分布的大小和方向是不同的。
比如在北美,磁力线与地球表面呈70度,这个角叫磁倾角。
在本文所用的三轴磁传感器中,其内部集成了3个惠斯通电桥,它们彼此互相垂直,分别对应直角坐标系中的x、y、z轴。
在通过这3个轴取得初始的磁数据后经过桥偏置补偿、硬铁补偿后,所得数据即可用于3D方程的求解,进而计算航向。
本文所用的三轴磁传感器中对应直角坐标系中的x轴和y轴决定了水平面,z轴垂直于水平面,此处的地磁场Hearth在水平面上的分量Hnorth所指即磁北的方向。
而x轴所指的即当前的方位的正前方,所以我们只需要测出x轴和Hnorth之间的夹角即可以知道当前的方位角α。
上述即为水平状态时电子罗盘的测角原理。
由式1可知我们所测得的方位角只是当前位置和地磁北极之间的夹角。
由于地磁北极和地理北极之间存在磁偏角,故应根据磁偏角相应的加上或减去当前所在方位的磁偏角,得到的才是当前位置真正的方位角。
而地球不同位置的磁偏角不同,应利用GPS接收器来确定当前的位置,从而校正地理位置带来的方位角测量误差。
带倾斜修正的电子磁罗盘倾角测量误差补偿算法于靖;卜雄洙;叶健【期刊名称】《中国惯性技术学报》【年(卷),期】2013(000)006【摘要】针对目前带倾斜修正的电子磁罗盘由于倾角测量误差大,导致航向角测量精度低的问题,提出了一种基于三轴加速度传感器倾角测量模型进行误差补偿的方法。
首先,研究了磁罗盘的倾角测量误差对航向角测量精度的影响,分析了加速度传感器测量倾角的原理及其误差来源。
然后,构建了三轴加速度传感器测倾角的物理模型,建立了相应的数学模型,采用了改进的最小二乘法对其进行参数识别,完成对倾角测量误差的补偿。
最后,利用 BP 神经网络算法对周围环境的罗差进行修正。
实验结果表明:通过对倾角测量误差的补偿,在30范围内,其倾角测量误差控制在0.3之内;能够将磁航向角测量误差由倾角测量误差补偿前的1.8降低到0.6,提高了电子磁罗盘的测量精度。
%In view that the magnetic electronic compass with tilt correction has large inclination measuring error which cause low precision of heading angle measurement, a error compensation method based on the measuring model of three accelerations is put forward. First, the influence of inclination measuring error of magnetic compass for magnetic heading angle accuracy is studied. The principle and error source of inclination measuring are analyzed. Then, the physical model and mathematical model of three accelerations for tilt sensing are established. In order to modify the error of inclination measuring, a modified least square method is proposed for the parametricidentification. Finally, a BP neural network algorithm is used to correct the magnetic deviation. The experiment results show that the inclination measuring error is within ±0.3° in the range of ±30° after compensating of inclination measuring error. As a result, the magnetic heading angle errors were reduced from ±1.8° to ±0.6° by the compensation. So the heading angle accuracy of magnetic electronic compass is improved.【总页数】5页(P721-725)【作者】于靖;卜雄洙;叶健【作者单位】南京理工大学机械工程学院南京 210094;南京理工大学机械工程学院南京 210094;南京理工大学机械工程学院南京 210094【正文语种】中文【中图分类】U666.1【相关文献】1.一种基于超限学习机的电子磁罗盘非线性误差补偿方法 [J], 韦宝泉;陈忠斌;林知明2.倾斜状态下电子磁罗盘的测角补偿算法研究 [J], 贾意弦;辛长范;马云建;陈铭;陈宇3.基于遗传算法的数字磁罗盘误差补偿方法研究 [J], 王秀4.三轴磁罗盘的高精度误差补偿算法研究 [J], 李珊;范大鹏;张智永;董强5.基于椭球曲面拟合的三维磁罗盘误差补偿算法 [J], 朱建良;王兴全;吴盘龙;薄煜明;张捷因版权原因,仅展示原文概要,查看原文内容请购买。
数字式磁罗盘误差补偿及数据处理方法研究数字式磁罗盘误差补偿及数据处理方法研究引言:数字式磁罗盘是现代导航领域重要的一种定位工具,它广泛应用于航空、航海、测绘、军事等领域。
但是,由于存在多种误差因素的影响,数字式磁罗盘的精度和精度稳定性成为制约其使用的主要因素。
为了提高数字式磁罗盘的测量精度和稳定性,需要对其误差进行补偿。
误差来源及分类:数字式磁罗盘的误差来源主要包括:磁场干扰、传感器本身误差、磁罗盘外力干扰等。
其中,外力干扰包括机体振动、温度变化、气压变化等因素。
因此,对于数字式磁罗盘的误差修正需要对这些方面进行考虑,以提高其精度。
误差补偿方法:根据数字式磁罗盘误差来源的不同,可以采取不同的误差补偿方法。
其中,传感器本身误差补偿需要对其进行定标修正;磁场干扰补偿则需要进行地磁校正,以抵消地球磁场对数字式磁罗盘的影响;外力干扰补偿则需要通过机体振动控制、温度控制、气压控制等手段进行。
数据处理方法:为了更好的运用数字式磁罗盘,对其数据进行处理也是至关重要的。
通过数据处理,可以获取到数字式磁罗盘的各种数据信息,如方位角、磁力值等。
具体的数据处理方法包括滤波、降噪、转换等。
其中,数字滤波是一种比较常用的处理方法,可以有效的去掉信号中的噪声成分。
同时,通过对数据进行转换,如坐标转换、字节流转换等,可以更好地与其他设备进行交互。
结论:数字式磁罗盘的误差补偿及数据处理是提高数字式磁罗盘精度稳定性的重要手段。
有效的误差补偿和数据处理方法可以提高数字式磁罗盘的测量精度和精度稳定性,具有重要意义。
基于隧道磁阻传感器的三维电子罗盘设计∗王琪;李孟委;王增跃;蒋孝勇;李锡广【摘要】Existing electronic compass is vulnerable to be distracted by the Magnetic Field in external environment, which leads to low accuracy. To solve this problem,a three-dimensional electronic compass is designed based on Tunneling Magneto Resistance sensor and a prototype is made. The error characteristics of compass in a real envi-ronment is studied,and ellipse hypothesis are carried out to compensate the azimuth error after ellipsoid-fitting cor-rection. Through experimental tests,the compensation effect of the ellipse hypothesis method,which compensated az-imuth accuracy of up to 0.85° and effectively reducing 94.81% of the azimuth error. Experimental results show that applying TMR sensor to electronic compass is feasible.%针对现有电子罗盘在地磁场检测时易受到外界磁场干扰而导致测量精度不高的问题,设计了基于隧道磁阻传感器( TMR)的三维电子罗盘并完成样机制作。

毕业设计说明书数字式电子罗盘设计学生姓名:孔垂礼学号: ********** 学院:计算机与控制工程专业:电气工程及其自动化指导教师:***2015 年 06 月数字式电子罗盘设计摘要数字式电子罗盘具有很多优点,例如:体积比较小、启动非常迅速、功率损耗较低、制造成本低廉等,当今社会测控技术对测向传感器提出了非常高的要求;为了提高数字罗盘的测量精度,特意设计了一种基于HMC5883L三轴磁阻传感器[1]的数字电子罗盘;在分析相关类似产品的基础上,特别强调对电源、器件选型、信号调理电路、软件设计等方面进行了分析研究,设计出了数字罗盘并且研制了试验的样机;为验证设计效果,在双轴陀螺测试转台上进行了测试,试验结果初步验证了该设计方案的可行性;论文的研究工作可以为研究和改良数字式磁罗盘的测量准确度提供可靠的资料.关键词:地磁场,数字罗盘,HMC5883L三轴磁阻传感器,重力加速度计Here is the translation of your chinese paper’s titleAbstractDigital electronic compass, has small volume, quick start, low power consumption, and low cost, the modern measurement and control technology puts forward higher requirements on sensor of direction finding; In order to improve the precision of the digital compass, we design a HMC5883L triaxial magnetic resistance sensor based digital electronic compass; On the basis of the analysis of related products, focuses on the power supply, device selection, signal conditioning circuit and software design are analyzed in aspects of research, design the digital compass and test prototype was developed; To verify the design effect, on the two-axis gyro testing table was tested, experimental results verify the feasibility of the design scheme of; Thesis research work could be used to research and provide reference for improving the measuring accuracy of digital magnetic compass.Key words : Earth's magnetic field, digital compass, HMC5883L three-axis magnetic resistance sensor, the gravity accelerometer目录摘要 (2)Abstract (3)目录...........................................................................................................................................错误!未定义书签。
一种AMR磁罗盘的误差建模与校准方法AMR(Anisotropic Magnetoresistance)磁罗盘是一种常用于检测磁场的传感器。
它的工作原理是基于反铁磁材料的自旋极化效应,当外加磁场改变时,AMR磁罗盘的电阻值也会发生变化。
然而,由于制造过程中存在一些误差,磁罗盘的测量结果可能存在一定的偏差。
为了提高磁罗盘的精度和准确性,需要对其进行误差建模与校准。
1.静态校准:静态校准主要是对零位漂移进行校准。
通过在不同的磁场条件下对磁罗盘的输出进行测量,得到零位漂移随磁场的变化曲线。
然后根据曲线的特征,使用合适的函数进行拟合,并得到修正系数。
通过在实际测量中使用修正系数,可以减小零位漂移对测量结果的影响。
2.温度补偿:由于AMR磁罗盘的电阻值随温度的变化而变化,需要进行温度补偿。
通过在不同温度下对磁罗盘的输出进行测量,并得到温度和电阻值之间的关系曲线。
然后在实际测量中,根据磁罗盘的温度值,使用曲线来修正磁罗盘的输出值,以消除温度对测量的影响。
3.非线性校准:AMR磁罗盘的输出与磁场之间并不是线性关系,存在一定的非线性误差。
为了消除非线性误差,可以通过在不同磁场条件下对磁罗盘的输出进行测量,并得到非线性误差随磁场的变化曲线。
然后使用合适的函数对曲线进行拟合,并得到修正系数。
在实际测量中,通过使用修正系数来消除非线性误差。
4.极性校准:AMR磁罗盘的输出值与磁场的方向有关,存在极性误差。
为了校准极性误差,可以通过在不同磁场方向下对磁罗盘的输出进行测量,并得到极性误差随磁场方向的变化曲线。
然后使用合适的函数对曲线进行拟合,并得到修正系数。
在实际测量中,根据磁罗盘测得的磁场方向值,使用修正系数来消除极性误差。
三轴电子罗盘的设计与误差校正
王勇军;李智;李翔
【期刊名称】《传感器与微系统》
【年(卷),期】2010(029)010
【摘要】介绍了三轴电子罗盘的测量原理.利用各向异性磁阻传感器和加速度传感器研制了带倾斜补偿功能的三轴电子罗盘,并论述了电子罗盘的硬件设计和软件流程.针对电子罗盘传感器的误差特点,采用十二位置标定法实现了罗盘的校正.在罗盘处于不同倾斜的情况下进行圆周测试,经误差校正和倾角补偿后的轨迹是大体重合的圆,有效降低了罗盘误差.在某些具备翻滚条件的应用场合,该校正方法还可有效补偿电子罗盘的罗差.
【总页数】3页(P110-112)
【作者】王勇军;李智;李翔
【作者单位】桂林电子科技大学,电子工程学院,广西,桂林,541004;桂林电子科技大学,电子工程学院,广西,桂林,541004;桂林电子科技大学,电子工程学院,广西,桂林,541004
【正文语种】中文
【中图分类】TP212.9
【相关文献】
1.小型多旋翼无人机三轴电子罗盘设计与误差分析校准 [J], 范崧伟;卞鸿巍
2.三轴磁罗盘的设计与误差校正 [J], 刘敬彪;郑玉冰;章雪挺
3.三轴磁阻电子罗盘设计 [J], 马建仓;胡士峰;邵婷婷
4.全固态三轴电子罗盘的应用设计 [J], 高呈学;钟磊;张明瑞
5.三轴磁阻电子罗盘的设计和误差补偿 [J], 邵婷婷
因版权原因,仅展示原文概要,查看原文内容请购买。
电子罗盘的设计及其误差补偿摘要;该文介绍了磁阻式电子罗盘的工作原理,设计了一种利用磁阻传感器和加速度计测定航向角、俯仰角、侧滚角的电子罗盘测量系统。
在分析电子罗盘误差形成的基础上,提出了相应的补偿方法。
实验结果表明,利用这些补偿方法,可有效的减低由制造和安装等所引起的误差。
同时,这种补偿方法也适用于其它3 轴传感器系统。
关键词:导航系统, 磁阻传感器,误差补偿1 引言目前,导航系统在汽车、航海、航空等领域已经得到广泛的应用。
电子罗盘是导航系统不可缺少的重要组成部分,主要分为磁通门和磁阻式。
磁通门传感器是由一套环绕磁芯的线圈组成,该磁芯配有励磁电路,能够提供低成本的磁场探测方法,但它们体积偏大、易碎、响应时间慢。
而使用磁阻传感器的电子罗盘克服了磁通门罗盘的不足,具有体积小、重量轻、精度高、可靠性强、响应速度快等优点,是未来电子罗盘的发展方向。
因此,本文所设计的电子罗盘采用3轴磁阻传感器进行地球磁场矢量测量,利用2 轴加速度计测量载体的重力加速度,通过补偿算法校准导航系统的误差,得到载体的航向角。
2电子罗盘的基本原理地球的磁场强度为0. 5 ×10 - 4 - 0. 6 ×10 - 4T ,无论何地,磁场的水平分量永远指向磁北,这是所有电子罗盘的制作基础。
传统的导航定位,通过以下3 个姿态参数:航向角(α) ,俯仰角(γ) ,横滚角(β)。
将磁阻传感器的3个敏感轴沿载体的3个坐标轴安装,分别测量地磁场磁感应强度H 在载体坐标系3个坐标上的投影分量(H X ,H Y ,H Z )。
在地平坐标系中,磁阻传感器的3轴输出为(H R - X ,H R - Y ,H R - Z )。
式(1)如下[][]T Z Y X T Z R Y R X R H H H H H H ,,cos sin 0sin cos 0001cos 0sin 010sin 0cos ,,11----⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-ββββ2 轴加速计测得的重力加速度为G X ,G Y ,已知当地的重力加速度值为g ,可得: γ= arcsin (G Y / g) (2)β= arcsin (G X / g) (3)α= arctan (H R - X/ H R - Y) (4)3系统设计3. 1系统结构框图电子罗盘的设计框图如图1所示,可分为3 大模块:传感器模块、数据采集模块和MCU 模块。