机械原理课程设计六杆机构运动与动力分析
- 格式:docx
- 大小:924.53 KB
- 文档页数:22
《机械设计》课程设计设计题目:压床六杆机构班级:姓名:学号:指导老师:日期:前言:机械的发展程度,机械工业的生产水平是一个国家现代化建设水平的主要标志之一,为了更好地运用、研究、发展机械,学习和掌握一定的机械设计基础知识是非常重要的。
机械设计课程主要介绍联接零件(包括螺栓联接、键联接等),传动零件(包括齿轮传动、蜗杆传动和带传动),轴系零件(包括轴、轴系、联轴器和离合器)。
以及其它零件的设计。
通过本课程的学习,将为进一步学习有关专业课和今后从事机械设计工作,直接服务于社会奠定良好的基础。
设计目的及要求:本课程的性质是以一般通用零件的设计为核心的设计性课程,而且是论述它们的基本设计理论与方法的技术基础课程。
通过学习这些基本内容去掌握有关的设计规律和技术措施,从而具有设计其他通用零、部件和某些专用零、部件(包括教材中没有提到的以及目前尚未出现的)的能力。
课程设计中,要求学生根据设计任务,绘制必要的图纸,编写说明书等。
通过对课程设计的编写,可以让学生领会到本课程所培养的真谛:1)有正确的设计思想并勇于创新探索;2)掌握通用零件的设计原理、方法和机械设计的一般规律,进而具有综合运用所学的知识,研究改进或开发新的基础件及设计简单的机械的能力;3)具有运用标准、规范、手册、图册和查阅有关技术资料的能力;4)掌握典型机械零件的试验方法,获得实验技能的基本训练;5)了解国家当前的有关技术经济政策,并对机械设计的新发展有所了解。
为了综合运用机械设计课程的理论知识,分析和解决与本课程有关的实际问题,使所学知识进一步巩固和加深,我参加了此次的机械设计课程设计。
功能原理设计:首先确定压床的机构原理及有关数据,制定一套最合适可行的基本构型和运动方案。
再查阅相关资料,通过精确的计算和运用相关应用软件(例如CAXA,Solidworks,ADAMS等造型、分析软件)进行运动模拟,对设计题目进行创新设计和运动仿真。
基本构型与运动方案确定之后就要对可能需要的零件进行设计和选取,绘制零件图、装配图等,并以二维的方式精确表达。
机械原理课程设计说明书题目六杆机构运动分析学院工程机械学院专业机械设计制造及其自动化班级机制三班设计者秦湖指导老师陈世斌2014年1月15日目录一、题目说明∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 21、题目要求∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 32、原理图∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 33、原始数据∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 3二、结构分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 4三、运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 51、D点运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 82、构件3运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙93、构件4运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙94、点S4运动分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10四、结论∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10五、心得体会∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10六、参考文献∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙11一、题目说明1、题目要求此次机械原理课程设计是连杆机构综合,通过对其分析,选择合适的机构的尺寸大小,并进行下列操作:⑴对机构进行结构分析;⑵绘制滑块D的运动线图(即位移、速度和加速度线图);⑶绘制构件3和4的运动线图(即角位移、角速度和角加速度线图);⑷绘制S4点的运动轨迹。
机械原理课程设计说明书设计题目:学院:班级:设计者:学号:指导老师:目录目录....................................................................................一、机构简介与设计数据.......................................................................1.1.机构简介.............................................................................1.2机构的动态静力分析....................................................................1.3凸轮机构构设计........................................................................1.4.设计数据.............................................................................二、压床机构的设计...........................................................................2.1.传动方案设计.........................................................................基于摆杆的传动方案...................................................................六杆机构A ............................................................................六杆机构B ............................................................................2.2.确定传动机构各杆的长度...............................................................三.传动机构运动分析..........................................................................3.1.速度分析.............................................................................3.2.加速度分析...........................................................................3.3. 机构动态静力分析....................................................................3.4.基于soildworks环境下受力模拟分析: ..................................................四、凸轮机构设计.............................................................................五、齿轮设计.................................................................................5.1.全部原始数据.........................................................................5.2.设计方法及原理.......................................................................5.3.设计及计算过程....................................................................... 参考文献.....................................................................................一、机构简介与设计数据1.1.机构简介图示为压床机构简图,其中六杆机构为主体机构。
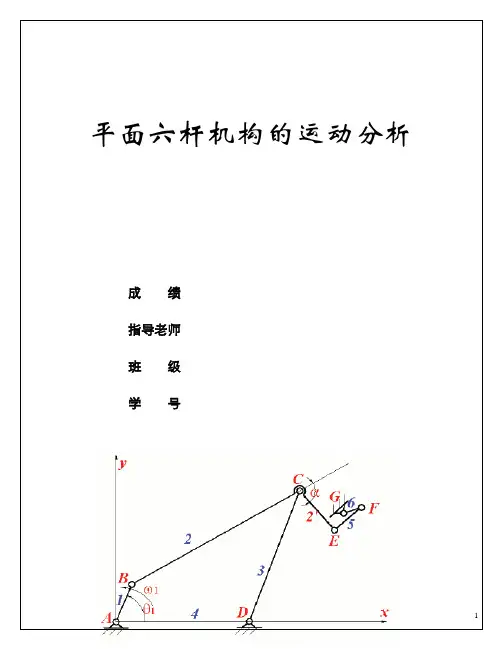
一、题目:计算平面连杆机构的运动学分析 (2)二、平面连杆机构的运动分析方程 (2)三、程序流程图 (5)四、计算源程序 (6)五、计算结果数据 (12)六、运动线图及分析 (238)七、体会及建议 (337)八、参考书 (337)一、题目:计算平面连杆机构的运动学分析1,图a 所示的为一平面六杆机构。
假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动杆件的角位移、角速度和角加速度以及E 点的位移、速度和加速度的变化情况。
a)表1 平面六杆机构的尺寸参数(单位:mm)二、平面连杆机构的运动分析方程1)位置分析建立封闭矢量多边形l 1+l 2= l 4+l 3 (即AB+BC=AD+DC )l 1+l 2+ l 2’= AG+l 5+l 6 (即AB+BC+CE =AG+GF+FE ) (式1)将机构的封闭矢量方程式(1)写成在两坐标上的投影式:1*cos 12*cos 243*cos 31*sin 12*sin 23*sin 31*cos 12*cos 22'*cos(2)5*cos 56*cos 61*sin 12*sin 22'*sin(2)5*sin 56*sin 6l l l l l l l l l l xg l l l l l yg l l q q q q q q q q q q q q q q q q ü+=+ïïïï+=ïýï++-a =++ïïï++-a =++ïþ化简整理成方程左边仅含未知量项的形式,即得:2*cos 23*cos 341*cos 1(1)2*sin 23*sin 31*sin 1(2)2*cos 22'*cos(2)5*cos 56*cos 61*cos 1(3)2*sin 22'*sin(2)5*sin 56*sin 61*sin 1(4)l l l l l l l l l l l xg l l l l l yg l q q q q q q q q q q q q q q q q ü-=--=-+-a --=-+-a --=-………………………………………………………………………ïïïïïýïïïïïþ(式2)在求解(式2)中各变量时,用牛顿迭代法会比较直观,但由于牛顿迭代法不便于限制l 5,l 6的位置,在有两种位置均满足上式时,无法限定它得出题中要求的解。
目录第一章内容介绍1- 1 ............................................................... 机构简介.21- 2 ............................................................... 设计数据.21- 3 机构简图 (3)第二章六杆机构设计2- 1 设计内容 (3)2- 2 ........................................................... 设计数据 52- 3 设计运动分析 (5)第三章凸轮设计3- 1 设计内容 (7)3- 2 ....................................................... 图解法设计73- 3 ........................................................... 凸轮机构的计算机辅助设计................................... (8)内容介绍第一章1•机构简介压床是应用广泛的锻压设备,用于钢板矫直、压制零件等。
如图所示为某压床的运动示意图。
其中,六杆机构ABCDEF为其主体机构,电动机经联轴器带动减速器的三对齿轮(Z1-Z2, Z3-Z4, Z5-Z6)将转速降低,然后带动压床执行机构(六杆机构ABCDEF )的曲柄1转动,六杆机构使滑块5克服阻力F r而上下往复运动,实现冲压工艺。
为了减小主轴的速度波动,在曲轴A上装有飞轮,在曲柄轴的另一端装有供润滑连杆机构各运动副用的油泵凸轮。
2 •设计数据:设计数据见表1和表2。
12017 35 53 20 65 8 55 150 30 150 30 18 36 54156010501703090703•机构简图第二章 六杆机构设计1. 设计内容通过已知数据利用图解法按比例作出该六杆机构 的运动简图的两个极限位置(如图2-1)图1-1六杆机构图1-2 凸轮机构 图1-3 齿轮机构并以 以点 AC 疋字说明:先选定比例尺i =0.0015m/mm ,根据所给参数,先在图上确定A 、D 亮点及滑块F 运动轨迹 所在直线。
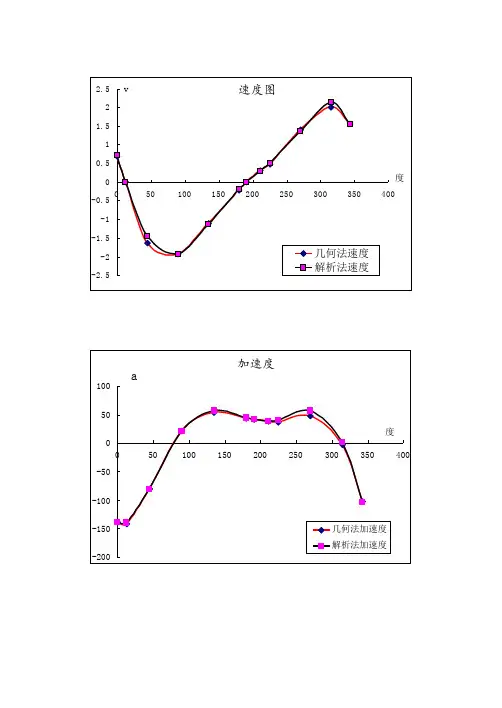
运动分析源程序#include "stdio.h"#include "math.h"#define PI 3.1415926void main(){ double a=0.4,b=0.2,L1=0.1,L2=0.34,L3=0.3,L4=0.28,z3=0.15,L6=0.4472;double Q1,Q2,Q3,Q4,L5,Q6=5.8195;double W1=2*PI*420/60,W2,W3,W4,V5;double E2,E3,E4,a5;double A,B,C;int x;scanf("%d",&x);Q1=x;Q1=Q1*PI/180;A=2*L1*L2*sin(Q1)-2*L6*L2*sin(Q6);B=2*L1*L2*cos(Q1)-2*L2*L6*cos(Q6);C=L1*L1+L2*L2+L6*L6-L3*L3-2*L1*L6*cos(Q1-Q6);Q2=2*atan((A-sqrt(A*A+B*B-C*C))/(B-C));if(Q1>52.685*PI/180&&Q1<335.387*PI/180)Q3=PI-asin((L1*sin(Q1)+L2*sin(Q2)-L6*sin(Q6))/L3);elseQ3=asin((L1*sin(Q1)+L2*sin(Q2)-L6*sin(Q6))/L3);W2=-W1*L1*sin(Q1-Q3)/(L2*sin(Q2-Q3));W3=W1*L1*sin(Q1-Q2)/(L3*sin(Q3-Q2));E2=(-W1*W1*L1*cos(Q1-Q3)-W2*W2*L2*cos(Q2-Q3)+W3*W3*L3)/( L3*sin(Q2-Q3));E3=(W1*W1*L1*cos(Q1-Q2)+W2*W2*L2-W3*W3*L3*cos(Q3-Q2))/(L 3*sin(Q3-Q2));Q4=PI-asin(z3*sin(Q3)/L4);L5=z3*cos(Q3)-L4*cos(Q4);W4=z3*W3*cos(Q3)/(L4*cos(Q4));E4=(L4*W4*W4*sin(Q4)+z3*E3*cos(Q3)-z3*W3*W3*sin(Q3))/(L4*cos (Q4));V5=z3*W3*cos(Q3)*tan(Q4)-z3*W3*sin(Q3);a5=L4*(E4*sin(Q4)+W4*W4*cos(Q4))-z3*(E3*sin(Q3)+W3*W3*cos(Q3));Q1=Q1*180/PI;Q3=Q3*180/PI;Q2=Q2*180/PI;Q4=Q4*180/PI;printf("Q1=%f\tV5=%f\ta5=%f\n",Q1,V5,a5);}运行结果Q1=0.000000 V5=0.723117 a5=-138.562170 Q1=45.000000 V5=-1.453729 a5=-80.061441 Q1=90.000000 V5=-1.929183 a5=20.042530 Q1=135.000000 V5=-1.139577 a5=56.642956 Q1=180.000000 V5=-0.205239 a5=44.695398 Q1=225.000000 V5=0.512321 a5=39.975979 Q1=270.000000 V5=1.362726 a5=56.223212 Q1=315.000000 V5=2.128956 a5=1.304283 Press any key to continue极位:Q1=13.000000 V5=-0.002777 a5=-139.309541 Q1=191.000000 V5=-0.018039 a5=41.257996 左极位后20°:Q1=211.000000 V5=0.295342 a5=38.588547 右极位前30°:Q1=343.000000 V5=1.560056 a5=-103.074286受力分析源程序#include "stdio.h"#include "math.h"#define PI 3.1415926main(int){ double a=0.4,b=0.2,L1=0.1,L2=0.34,L3=0.3,L4=0.28,z3=0.15,L6=0.4472;double Q1,Q2,Q3,Q4,L5,Q6=5.8195;double W1=2*PI*420/60,W2,W3,W4,V5;double E2,E3,E4,a5;doublef45x,f45y,f34x,f34y,f23x,f23y,f36x,f36y,f12x,f12y,f16x,f16y,M0,as4x,as4y,as3x,as3y,Pr;double m3=11,m4=10,m5=11,Lds3=0.07,Les4=0.14,Js3=0.02,Js4=2.8, g=9.8;double A,B,C;int x;scanf("%d",&x);Q1=x;Q1=Q1*PI/180;A=2*L1*L2*sin(Q1)-2*L6*L2*sin(Q6);B=2*L1*L2*cos(Q1)-2*L2*L6*cos(Q6);C=L1*L1+L2*L2+L6*L6-L3*L3-2*L1*L6*cos(Q1-Q6);Q2=2*atan((A-sqrt(A*A+B*B-C*C))/(B-C));if(Q1>52.685*PI/180&&Q1<335.387*PI/180)Q3=PI-asin((L1*sin(Q1)+L2*sin(Q2)-L6*sin(Q6))/L3);elseQ3=asin((L1*sin(Q1)+L2*sin(Q2)-L6*sin(Q6))/L3);W2=-W1*L1*sin(Q1-Q3)/(L2*sin(Q2-Q3));W3=W1*L1*sin(Q1-Q2)/(L3*sin(Q3-Q2));E2=(-W1*W1*L1*cos(Q1-Q3)-W2*W2*L2*cos(Q2-Q3)+W3*W3*L3)/( L3*sin(Q2-Q3));E3=(W1*W1*L1*cos(Q1-Q2)+W2*W2*L2-W3*W3*L3*cos(Q3-Q2))/(L 3*sin(Q3-Q2));Q4=PI-asin(z3*sin(Q3)/L4);L5=z3*cos(Q3)-L4*cos(Q4);W4=z3*W3*cos(Q3)/(L4*cos(Q4));E4=(L4*W4*W4*sin(Q4)+z3*E3*cos(Q3)-z3*W3*W3*sin(Q3))/(L4*cos( Q4));V5=z3*W3*cos(Q3)*tan(Q4)-z3*W3*sin(Q3);a5=L4*(E4*sin(Q4)+W4*W4*cos(Q4))-z3*(E3*sin(Q3)+W3*W3*cos(Q3));if(Q1<344*PI/180&&Q1>211*PI/180)Pr=2100;elsePr=0;as4y=0.5*L4*(E4*cos(Q4)-W4*W4*sin(Q4));as4x=-0.5*L4*(sin(Q4)*E4+W4*W4*cos(Q4));as3x=-Lds3*(sin(Q3)*E3+W3*W3*cos(Q3));as3y=Lds3*(E3*cos(Q3)-W3*W3*sin(Q3));f45x=Pr+m5*a5;f45y=((m4*as4y*Les4+f45x*L4)*fabs(sin(Q4))-Js4*E4)/(L4*fabs(cos(Q4 )))-(m4*as4y*Les4+m4*g*Les4)/L4;f34x=m4*as4x+f45x;f34y=m4*as4y+m4*g+f45y;f23y=((f34y*(L3-z3)+m3*as3x*(L3-Lds3)-(f34x+m3*as3x)*L3)*fabs(sin (Q3))-(f34y*(L3-z3)+m3*g*(L3-Lds3)+m3*as4y*(L3-Lds3))-Js3*E3*(1+L3)+ L3*fabs(sin(Q3))*(m3*as3x*Lds3+f34x*z3))/(L3*fabs(cos(Q3))*(1+L3))+(f3 4y+m3*as3y+m3*g+m3*as3y*Lds3+m3*g*Lds3+f34y*z3)/(1+L3);f23x=m3*as3x*Lds3+f34x*z3-((m3*as3y*Lds3+m3*g*Lds3+f34y*z3-f23y*L 3)*fabs(cos(Q3))-Js3*E3)/fabs(sin(Q3));f36x=f23x-f34x-m3*as4x;f36y=f23y-f34y-m3*as3y-m3*g;f12x=f23x;f12y=f23y;f16x=-f12x;f16y=-f12y;M0=L1*f12x*fabs(sin(Q1))+L1*f12y*fabs(cos(Q1));Q1=Q1*180/PI;Q3=Q3*180/PI;Q2=Q2*180/PI;Q4=Q4*180/PI;printf("Q1=%f\nf12x=%f\tf12y=%f\tf16x=%f\nf16y=%f\tf23x=%f\tf23y=%f\nf34x=%f\tf34y=%f\tf36x=%f\nf36y=%f\tf45x=%f\tf45y=%f\nM0=%f\n\n",Q1, f12x,f12y,f16x,f16y,f23x,f23y,f34x,f34y,f36x,f36y,f45x,f45y,M0);}运行结果:Q1=0.000000f12x=17.765709 f12y=10529.171093 f16x=-17.765709f16y=-10529.171093 f23x=17.765709 f23y=10529.171093 f34x=-1498.449708 f34y=-473.952615 f36x=1487.907845f36y=10853.632966 f45x=-1524.183865 f45y=-612.560480 M0=1052.917109Q1=45.000000f12x=15.620848 f12y=17655.996734 f16x=-15.620848f16y=-17655.996734 f23x=15.620848 f23y=17655.996734 f34x=-914.893109 f34y=-1094.650815 f36x=968.152944f36y=18698.355689 f45x=-880.675848 f45y=-1138.584446 M0=1249.572079Q1=90.000000f12x=-27.781326 f12y=-1593.917401 f16x=27.781326f16y=1593.917401 f23x=-27.781326 f23y=-1593.917401 f34x=119.832516 f34y=-1631.799744 f36x=-36.914997f36y=107.428967 f45x=220.467830 f45y=-1557.059526 M0=-2.778137Q1=135.000000f12x=1.746307 f12y=-274.537300 f16x=-1.746307f16y=274.537300 f23x=1.746307 f23y=-274.537300 f34x=663.627931 f34y=918.859937 f36x=-706.492583 f36y=-1348.841579 f45x=623.072514 f45y=774.453110 M0=-19.289235Q1=180.000000f12x=72.496480 f12y=1096.595500 f16x=-72.496480f16y=-1096.595500 f23x=72.496480 f23y=1096.595500 f34x=597.981897 f34y=2333.321630 f36x=-642.451182 f36y=-1559.912307 f45x=491.649383 f45y=2025.529900 M0=109.659550Q1=225.000000f12x=-1.187157 f12y=-801.303358 f16x=1.187157f16y=801.303358 f23x=-1.187157 f23y=-801.303358 f34x=2615.855028 f34y=2725.805453 f36x=-2700.773366 f36y=-3776.191638 f45x=2539.735772 f45y=2490.192311 M0=-56.744652Q1=270.000000f12x=-71.339087 f12y=-3362.886346 f16x=71.339087f16y=3362.886346 f23x=-71.339087 f23y=-3362.886346 f34x=2722.715707 f34y=1499.742106 f36x=-2798.741209 f36y=-4953.953835 f45x=2718.455329 f45y=1417.788811 M0=-7.133936Q1=315.000000f12x=-87.735770 f12y=-11506.494217 f16x=87.735770f16y=11506.494217 f23x=-87.735770 f23y=-11506.494217 f34x=1995.868177 f34y=-679.023733 f36x=-1953.277114 f36y=-10738.478415 f45x=2114.347116 f45y=-585.343147 M0=-819.835789Press any key to continue左极位Q1=191.000000f12x=70.835563 f12y=1079.995938 f16x=-70.835563f16y=-1079.995938 f23x=70.835563 f23y=1079.995938 f34x=555.424372 f34y=2242.657616 f36x=-596.333863 f36y=-1479.131618 f45x=453.837960 f45y=1941.407675 M0=107.366944右极位:Q1=13.000000f12x=16.035702 f12y=9226.154046 f16x=-16.035702f16y=-9226.154046 f23x=16.035702 f23y=9226.154046f34x=-1492.448849 f34y=-232.563603 f36x=1464.532845 f36y=9285.837683 f45x=-1532.404946 f45y=-393.953180 M0=899.329557左极位后20°:Q1=211.000000f12x=56.037059 f12y=864.567500 f16x=-56.037059f16y=-864.567500 f23x=56.037059 f23y=864.567500 f34x=511.929262 f34y=1915.024461 f36x=-552.092969 f36y=-1331.984141 f45x=424.474020 f45y=1647.809675 M0=76.994023右极位前30°:Q1=343.000000f12x=-68.415863 f12y=-17870.261008 f16x=68.415863f16y=17870.261008 f23x=-68.415863 f23y=-17870.261008 f34x=928.825780 f34y=22.246898 f36x=-956.148863 f36y=-17939.676255 f45x=966.182853 f45y=-16.696299M0=-1710.941793。
平面六杆机构的运动分析
1.确定机构的几何特性:首先,需要根据机构的构件和铰链的几何特
性确定机构的几何特性。
这包括确定构件的长度、铰链的位置和角度。
2.建立机构的运动方程:根据机构的几何特性,可以建立机构的运动
方程。
运动方程描述了机构各构件之间的运动关系,可以通过几何关系和
运动链法建立运动方程。
3.解决运动方程:通过求解运动方程,可以得到机构各构件的位置、
速度和加速度。
这可以通过数值方法或解析方法来完成。
4.分析机构的运动特性:根据机构的运动方程和解决的结果,可以分
析机构的运动特性。
这包括机构的平稳性、运动范围、速度和加速度的变
化等。
5.优化机构的设计:根据分析的结果,可以对机构的设计进行优化。
例如,可以调整构件的长度、角度和铰链的位置,以改善机构的运动性能。
总之,平面六杆机构的运动分析是研究和设计机械系统的重要步骤。
通过分析机构的运动特性,可以优化机构的设计,提高机械系统的性能和
效率。
因此,对平面六杆机构的运动分析有着重要的理论和实际意义。
机械原理课程设计说明书设计题目:平面六杆机构学院:机械工程学院姓名:林立班级:机英101同组人员:刘建业张浩指导老师:王淑芬题目三:平面六杆机构.一. 机构简介1.此平面六杆机构主要由一个四杆机构,和一个曲柄滑块机构构成,其中四杆机构是由1杆,2杆,3杆和机架构成的曲柄摇杆机构,1杆为主动件,转速为90rpm ,匀速转动。
其中滑块机构由3杆,4杆,滑块5和机架构成,以四杆机构的摇杆为主动件2.设计要求:各项原始数据如图所示,要求对机构的指定位置进行运动分析和动态静力分析,计算出从动件的位移,速度(角速度),加速度(角加速度)和主动件的平衡力偶M ,进行机构运动分析,建立数学模型。
之后进行动态静力分析,建立数学模型,必须注意,工作行程和返回行程阻力的大小,方向,主动件处于何位置时有力突变,需要计算两次。
二. 机构运动分析:1.首先分析1杆,2杆,3杆和机架组成的四杆机构,可列复数矢量方程 (1-1) 应用欧拉公式 将实部和虚部分 离得332211cos cos cos θθθl b l l +=+ 332211sin sin sin θθθl a l l +=+把以上两式消元整理得0cos sin 33=++CB A θθ36213621θθθθi i i i l e l l l e e e +=+θθθsin cos i i +=e其中)sin cos (22cos 22sin 21112223212231313131θθθθa b l b a l l l C bl l l B al l l A ++----=-=-=解之可得)/(])([)2/tan(2/12223C B C B A A --+±=θ (1)速度分析将式(1-1)对时间t 求导,可得333222111cos cos cos θθθw l w l w l =+ 333222111sin sin sin θθθw l w l w l =+联解以上两式可求得两个未知角速度,3杆和2杆的角速 度3w 和2w)]-sin()/[l -sin(l )]sin(/[)sin(3223111223321113θθθθθθθθw w l l w w -=--=(2)加速度分析将式(1-1)对时间t 两次求导。
机械原理课程设计说明书设计题目:六杆机构运动分析学院:工程机械学院专业:机械设计制造及其自动化班级:25041004设计者:25041004指导老师:张老师日期:2013年01月07日目录1.课程设计题目以及要求————————————————————32.运用辅助软件对结构进行结构分析———————————————43.数据收集以及作图———————————————————————114.总结————————————————————————————17六杆机构运动分析1、分析题目对如图5所示的六杆机构进行运动与动力分析,各构件长度、滑块5的质量G 、构件1转速n1、不均匀系数δ的已知数据如表5所示。
2、分析内容(1)对机构进行结构分析:(2)绘制滑块D 的运动线图(即位移、速度和加速度线图):(3)绘制构件3和4的运动线图(即角位移、角速度和角加速度线图): (4)绘制S4点的运动轨迹。
图5表5方案号L CDmmL ECmmymm L AB mm L CS4 mm n 1r/mi n1 975 360 50 250 400 23.52 975 325 50 225 350 33.53 9003005020030035(一)对机构进行结构分析选取方案三方案号L CDmm L ECmmymmL ABmmL CS4mmn 1r/mi n3 900 300 50 200 300 35对六杆机构进行运动分析:(1)原始数据的输入:(2)基本单元的选取及分析:(3)各点运动参数:(4)长度变化参数(5)各构件角运动参数:(二)滑块D的运动线图(位移-速度-加速度线图):(三)构件3的运动线图(角位移-角速度-角加速度线图):(四)构件4的运动线图(角位移-角速度-角加速度线图):(五)S4点的运动轨迹:(六)数据收集以及作图(1)滑块D 点x 、y 方向的运动参数如表6.1所示表6..1由上表可以得到D 点运动线图如图6.1所示图6.1位置 0123456789101112位 移X 1188.097 1187.376 1058.394 848.5281 680.2758 607.9142 606.0113 651.5314 734.6896 848.5281 980.0058 1105.089 1188.097 Y 0 0 0 0 0 0 0 0 0 0 0 0 0 速 度X 332.4289 -434.0533 7293.698 -1466.08 -831.5157 -222.7902 169.5616 457.6898 699.4701 879.648 933.0263 776.3062 332.4289 Y 0 0 0 0 0 0 0 0 0 0 0 0 0 加 速度X -4255.382 -6281.231 -4679198 2533.081 4920.073 3387.318 2265.425 1834.254 1530.378 911.9092 -264.7796 -2020.469 -4255.382 y 0(2)构件3的运动参数如表6.2所示表6.2位置0 1 2 3 4 5 6 7 8 9 10 11 12角位移φ14.03624 -16.10211 -50.93532 -90 230.9353 196.1021 165.9638 139.1066 114.1333 90 65.86674 40.89339 14.03624角速度ω-3.4496 -3.947138 -4.561904 -4.886933 -4.561904 -3.947138 -3.4496 -3.1416 -2.981412 -2.93216 -2.981412 -3.1416 -3.4496角加速度ɛ-2.789002 -4.130385 -3.972855 -6.092957 3.972855 4.130385 2.789002 1.582846 0.7038764 2.368942 -0.703876 -1.582846 -2.789002由上表得构件3的运动线图如图6.2所示图6.2(3)构件4的运动参数如表6.3所示表6.3位置0 1 2 3 4 5 6 7 8 9 10 11 12 φ-4.63715 5.304571 14.99956 19.471122 14.99956 5.304571 -4.63715 -12.60438 -17.70998 -19.47122 -17.70998 -12.60438 -4.63715 角位移ω 1.119198 1.269533 0.992103 1.253846 -0.9921031 -1.269533 -1.119198 -0.8111576 -0.4265414 -1.775216 0.4265414 0.1811158 1.119198 角速度ɛ 1.768468 0.031558 -4.448388 -8.443604 -4.448388 0.031558 1.768468 2.468482 2.88811092 3.039697 2.881092 2.468482 1.768468 角加速度由表6.3参数可得构件4的运动线图如图6.3所示图6.3(4)S4点x、y方向的运动参数如表6.4所示表6.4位置0 1 2 3 4 5 6 7 8 9 10 11 12位移X 590.0608 586.9459 478.8375 282.8427 100.7192 10.48452 7.975251 65.99134 163.1245 282.8427 408.4406 519.5487 590.0608 Y 48.50713 -55.47002 755.287 -200 -155.287 -55.47002 48.50713 130.9307 182.5194 200 182.5194 130.9307 48.50713速度X 278.1398 -363.6323 -1139.637 -1466.08 -985.5764 -293.2113 223.8507 563.8953 777.3222 879.648 855.1742 670.1007 278.1398 Y -669.3207 -758.4576 -574.98 -8.42273 574.98 758.4576 669.3207 474.9653 243.7962 7.905602 -243.7962 -474.9653 -669.3207加速度X -3592.063 -5316.593 -4799.736 844.3604 4920.073 4351.956 2928.744 1896.326 1108.512 303.9697 -686.6455 -1958.397 -3592.063 y -1118.368 70.54837 2730.937 4776.623 2730.937 70.54837 -1118.368 -1531.544 -1679.939 -1719.512 -1679.939 -1531.544 -1118.368(七)总结:六杆机构的运动分析相比课本上的平面四杆机构来说难度大些,而且是用辅助软件进行运动分析,这看起来似乎难度更大。
机械原理课程设计说明书题目:平面六杆机构机械工程及自动化专业2012年6月28日1、题目说明图(a )为一平面六杆机构,主动件1的杆长1r =AB=0.122m ,角速度1=10rad/s ω,机架6上的1=AC=0.280m h ,2=0.164m h ,比例尺L μ=实际尺寸/图上尺寸=2。
图(a )平面六杆机构试用相对运动图解法求移动从动件5的速度5V 与加速度5a 。
2、设计数据 1)位置分析作机构位置运动简图,由图(a-1)得导杆3上B 、C 两点之间的图上长度0.182BC m =C 、D 两点之间的图上长度0.853CD m =B 、C 两点之间的实际长度0.364BC L m =C 、D 两点之间的实际长度0.171CD L m =图(a-1)机构位置运动简图从图(a-1)中量取516.28mm=32.56mm L S μ=⨯2)速度分析根据两构件上重合点之间的速度合成原理,得导杆3上的点与滑块2上的点之间的速度方程为B3V = B2V + B3B2V1BA : //: ? ?BC BA CB ωl ⊥⊥方向大小其中,取速度比例尺V μ=实际速度(mm/s)/图上尺寸(mm)=10。
在机构图附近的合适位置作速度图,取任意一点p 作为作图的起点,作2pb AB ⊥, 由532.56mm S =211V pb r μω=,得211/100.122/100.122122V pb r m mm ωμ==⨯==,作3pb BC ⊥,作23//b b CD ,得交点3b ,如图(b-2)所示。
从图(b-2)中量取3940.094pb mm m ==, 2377.10.0771b b mm m ==。
由33V BC pb L μω=,得33/0.09410/0.364 2.582/V BC pb L rad s ωμ==⨯=,方向为逆时针; 由3232V B B b b V μ=,得相对速度32320.0771100.771/B B V V b b m s μ==⨯=。
目录第一部分:六杆机构运动与动力分析一.机构分析分析类题目 3 1分析题目 32.分析内容 3 二.分析过程 4 1机构的结构分析 42.平面连杆机构运动分析和动态静力分析 53机构的运动分析8 4机构的动态静力分析18 三.参考文献21第二部分:齿轮传动设计一、设计题目22二、全部原始数据22三、设计方法及原理221传动的类型及选择22 2变位因数的选择22四、设计及计算过程241.选取两轮齿数242传动比要求24 3变位因数选择244.计算几何尺寸25 五.齿轮参数列表26 六.计算结果分析说明28 七.参考文献28第三部分:体会心得29一.机构分析类题目3(方案三)1.分析题目对如图1所示六杆机构进行运动与动力分析。
各构件长度、构件3、4绕质心的转动惯量如表1所示,构件1的转动惯量忽略不计。
构件1、3、4、5的质量G1、G3、G4、G5,作用在构件5上的阻力P工作、P空程,不均匀系数δ的已知数值如表2所示。
构件3、4的质心位置在杆长中点处。
2.分析内容(1)对机构进行结构分析;(2)绘制滑块F的运动线图(即位移、速度和加速度线图);(3)绘制构件3角速度和角加速度线图(即角位移、角速度和角加速度线图);(4)各运动副中的反力;(5)加在原动件1上的平衡力矩;(6)确定安装在轴A上的飞轮转动惯量。
图1 六杆机构方案号L DF(mm)L CE(mm)L CD(mm)L AB(mm)L AC(mm)n1r/minJ S3kg.m2J S4kg.m23 510 575 170 140 375 80 0.22 0.16方案号G1(kg)G3(kg)G4(kg)G5(kg)P工作(N)P空程(N)δ3 14 75 55 80 1400 140 1/40二.分析过程:通过CAD制图软件制作的六杆机构运动简图:图2 六杆机构CAD所做的图是严格按照题所给数据进行绘制的。
并机构运动简图中活动构件的序号从1开始标注,机架的构件序号为0。
机械原理课程设计说明书设计题目:压床机构设计班级 :B042114学号 :B**********:**完成日期:2013年1月一、机构简介 (2)1.压床机构简介 (2)2.设计内容 (3)(1)机构的设计及运动分折 (3)(2)凸轮机构构设计 (3)二、执行机构的选择 (4)方案一 (4)(1)运动分析 (4)(2)工作性能 (4)(3)机构优、缺点 (5)方案二 (5)(1)运动分析 (5)(2)工作性能 (6)(3)机构优、缺点 (6)方案三 (6)(1)运动分析 (7)(2)工作性能 (7)(3)机构优、缺点 (7)选择方案 (7)三、主要机构设计 (8)1、连杆机构的设计 (8)2、凸轮机构设计 (8)四、机构运动分析 (13)五、原动件原则 (16)六、传动机构的选择 (16)七、运动循环图 (18)八、心得体会 (19)九、参考文献 (20)一、机构简介1.压床机构简介压床机械是被应用广泛的锻压设备它是由六杆机构中的冲头(滑块)向下运动来冲压机械零件的。
其执行机构主要由连杆机构和凸轮机构组成。
图1为压床机械传动系统示意图。
电动机经联轴器带动三级齿轮减速传动装置后,带动冲床执行机构(六杆机构,见图2)的曲柄转动,曲柄通过连杆,摇杆带动冲头(滑块)上下往复运动,实现冲压零件。
在曲柄轴的另一端,装有供润滑连杆机构各运动副的油泵凸轮机构。
2.设计内容(1)机构的设计及运动分折已知:中心距x1、x2、y, 构件4 的上、下极限角,滑块的冲程H,比值CB/BO4、CD/CO4,各构件质心S 的位置,曲柄转速n1。
要求:将连杆机构放在直角坐标系下,编制程序,并画出运动曲线,打印上述各曲线图。
(2)机构的动态静力分析已知:各构件的重量G 及其对质心轴的转动惯量Js(曲柄2 和连杆5的重力和转动惯量略去不计),阻力线图(图9—7)以及连杆机构设计和运动分析中所得的结果。
要求:通过建立机构仿真模型,并给系统加力,编制程序求出外力,并作曲线,求出最大平衡力矩和功率。
西北农林科技大学机械系统动力学结课报告姓名:何焱班级:机制113班学号:2011012760 日期:2014.5.15六杆机构的动力学分析如下为六杆机构的简图,其中OA杆处的曲柄传动机构为原动件,其动力由电机提供并通过齿轮传递过来。
设图中齿轮传动为一对标准安装的标准渐开线直齿圆柱齿轮完成,则正压力N与两节圆公切线的夹角等于分度圆压力角20度考虑与N垂直的齿面滑动摩擦力F,将其简化为恒力,方向指各齿轮O一侧,则啮合力方向可知。
对六杆机构进行动力学分析,在受力分析后列动力学方程。
为采用逐次方程组求解法,在同一杆件两铰链点连线上,以切、法线方向设置某些铰链点力,其他方向则以x,y方向设置。
作受力分析图如下:以滑块D 为研究对象,列动力学方程:DD y D D x D N F g m D N x m P D F 16600μ==--=-+--以BAD 杆为研究对象,列动力学方程:0)()()(0sin cos cos sin 0cos sin sin cos 33333333333333333=-------==---+-+=---++B B BA A B C x B C y B B B A A B B A A x x x g m J L N y y C x x C M y m g m F N N F D x m F N N F D Y ααααααααα 以滑块A 为研究对象,列动力学方程:AA A A A A A A A T A A A A y A A A x N F y y x x x y m x x g m J LB M ym g m N F A x m N F A 2222222222332330)]()([)(0cos sin 0sin cos μααααα==-------==--+--=---- 以为滑块B 研究对象,列动力学方程:0cos sin 0sin cos 53333=--+=++g m N F B N F B B B y B B x αααα以0A 杆为研究对象,列动力学方程:该曲柄传动是由齿轮Ⅰ带动齿轮Ⅱ转动来实现的以曲柄所在的齿轮Ⅱ为研究对象进行分析,N 、F 分别为齿轮Ⅱ所受到的法向正压力和摩擦力。
机械原理6杆机构设计实例机械原理中的六杆机构是一种基本的机械结构,由六个连杆组成,可以实现特定的运动和转换功能。
本文将为您提供一个六杆机构的设计实例,以便更好地理解其工作原理和应用。
1. 设计目标:我们的设计目标是创建一个六杆机构,可以将旋转运动转换为直线运动。
该机构将用于驱动一个线性推进器,以实现物体在直线轴上的移动。
2. 机构设计:为了实现我们的设计目标,我们选择了一种常见的六杆机构类型,即双曲线传动机构。
该机构由两个相交的双曲线连杆和四个普通连杆组成。
其中两个普通连杆连接驱动轴和双曲线连杆,另外两个普通连杆连接双曲线连杆和线性推进器。
3. 工作原理:当驱动轴旋转时,通过连杆的连接,双曲线连杆也开始旋转。
由于双曲线曲面的特性,使得连接在其上的普通连杆产生复杂的运动轨迹。
这种运动轨迹可以被利用,使得线性推进器在直线轴上产生直线运动。
4. 应用:这种六杆机构设计可以广泛应用于需要将旋转运动转换为直线运动的场景中。
例如,在自动化生产线中,可以使用该机构实现工件的装配和定位。
另外,在机床中,该机构也可以用于驱动刀具进行直线切削操作。
5. 设计考虑:在进行六杆机构设计时,需要考虑以下几个因素:- 机构尺寸:根据特定应用的需求,确定机构的尺寸和比例。
- 运动平稳性:为了确保机构运动平稳,需要进行合理的连杆长度和角度的选择。
- 载荷承受能力:根据应用场景中的负载要求,设计机构以承受相应的载荷。
- 动力传递效率:通过减少摩擦和能量损失来提高机构的动力传递效率。
6. 结论:通过设计一个六杆机构,我们成功地实现了将旋转运动转换为直线运动的目标。
该机构可以在自动化生产线和机床等领域中发挥重要作用。
在设计过程中,我们需要考虑机构尺寸、运动平稳性、载荷承受能力和动力传递效率等因素。
这个设计实例展示了六杆机构在实际应用中的重要性和灵活性。
以上就是关于机械原理六杆机构设计的一个实例解释。
通过这个例子,我们可以更好地理解六杆机构的工作原理和应用,以及设计过程中需要考虑的因素。
机械原理课程设计六杆机构运动分析学院:工程机械专业:机械设计制造及其自动化班级:25041004设计者:王东升于新宇2013年 1月8日一、分析题目如图1所示六杆机构,对其进行运动和动力分析。
已知数据如表1所示。
r1=r3=L2=110mm ,L4=600mm ,L AD=39mm ,n1=40r/min ,L CS4=220mm.图1 六杆机构二、分析内容(1)进行机构的结构分析;如2图所示,建立直角坐标系。
机构中活动构件为1、2、3、4、5,即活动构件数n=5。
A、C、B、D、E处运动副为低副(6个转动副,1个移动副),共7个,即P l=7。
则机构的自由度为:F=3n-2P l=3Χ5-2Χ7=1。
图2(a)图2(b) 图2(c)如图2,拆出基本杆组,(a)为原动件,(b)、(c)为二级杆组,该机构是由机架0、原动件1和2个Ⅱ级杆组组成,故该机构是Ⅱ级机构。
(2)绘制滑块E的运行线图;利用JYCAE软件求解。
1、将题设所给的原始数据(机构的活动构件数、转动副数、移动副数、己知长度值总数和机构的自由度)分别输入JYCAE软件中,如图3:图3—1图3—2图3—3图3—42、机构的运动分析输入完所有的原始数据以后,开始运动分析。
求E点的运动线图,要选取基本单元5,但是利用基本单元5的条件是已知C点的运动状态,所以先利用基本单元1、2求得C点的运动状态,然后求的E点运动线图。
如图4。
图4—1 解得B点运动参数图4—2 解得C点运动参数图4—3 解得E点运动参数共选取3个基本单元,如图4—4,然后运算。
图4—4运算后,E点运动参数如表1,运动线图如图5。
表1 点E的x、y方向的运动参数图5 点E运动线图(3)绘制构件3和4的运动线图;由(2)可知各点运动参数,继续上述程序求解。
如下图:求构件3运动线图是,选取基本单元6中的摆动倒杆(1),如图6—1,运算后,运动参数如表2,运动线图如图6—2。
图6—1表2 构件3的运动参数图6—2求构件4运动线图时,选取基本单元6中的摆动倒杆(1),如图6—3,运算后,运动参数如表3,运动线图如图6—2。
六杆插床机构分析- Crocodile(baidu)Mechanical Principle Course Design机械原理课程设计题目:六杆插床机构运动分析学院:装备制造学院班级:机制11专业:机械设计制造及其自动化学生姓名:Crocodile 学号:指导教师:Mr.H .完成时间:2014年1月7日成绩:1Mechanical Principle Course Design目录机械原理课程设计任务书........................................................................ 3 一.课程设计目的.................................................................................... 4 二.课程设计的内容与步骤.................................................................... 4 1.插床机构简介与设计数据............................................................... 4 2.插床机构的设计内容与步骤........................................................... 5 (1)导杆机构的设计与运动分析.............................................. 5 (2)导杆机构的动态静力分析................................................ 11 插床导杆机构的运动分析与动态静力分析图...................................... 15 参考资料 (17)2Mechanical Principle Course Design机械原理课程设计任务书设计题目:六杆插床机构分析表1-1 插床设计数据表导杆机构的设计及运动分析设计内容行程滑块杆长比lO1O2 a b n1/(r·min-1) 速比冲程lBC/lO2B 系数H/mm /mm K 曲柄转数 c 数据设计内容数据导杆机构动态静力分析导杆3的重力导杆3的重力导杆3的转动惯量G3/N G5/N JS3(kg·m2) d 阻力运转不均匀系mm Q/N 数δ 图1-1 插床机构及其运动简图60 2 100 1 150 50 50 125160 320 0.14 120 1000 1/253Mechanical Principle Course Design一.课程设计目的机械原理课程设计是高等工科院校机械类专业学生第一次较全面的机械运动学和动力学分析与设计训练,其目的在于进一步加深学生所学的理论知识,培养学生独立解决有关实际问题的能力,使学生对于机械动力学与运动学的分析与设计有一较完整的概念。
目录第一部分:六杆机构运动与动力分析一.机构分析分析类题目 3 1分析题目 32.分析内容 3 二.分析过程 4 1机构的结构分析 42.平面连杆机构运动分析和动态静力分析 53机构的运动分析8 4机构的动态静力分析18 三.参考文献21第二部分:齿轮传动设计一、设计题目22二、全部原始数据22三、设计方法及原理221传动的类型及选择22 2变位因数的选择22四、设计及计算过程241.选取两轮齿数242传动比要求24 3变位因数选择244.计算几何尺寸25 五.齿轮参数列表26 六.计算结果分析说明28 七.参考文献28第三部分:体会心得29一.机构分析类题目3(方案三)1.分析题目对如图1所示六杆机构进行运动与动力分析。
各构件长度、构件3、4绕质心的转动惯量如表1所示,构件1的转动惯量忽略不计。
构件1、3、4、5的质量G1、G3、G4、G5,作用在构件5上的阻力P工作、P空程,不均匀系数δ的已知数值如表2所示。
构件3、4的质心位置在杆长中点处。
2.分析内容(1)对机构进行结构分析;(2)绘制滑块F的运动线图(即位移、速度和加速度线图);(3)绘制构件3角速度和角加速度线图(即角位移、角速度和角加速度线图);(4)各运动副中的反力;(5)加在原动件1上的平衡力矩;(6)确定安装在轴A上的飞轮转动惯量。
图1 六杆机构方案号L DF(mm)L CE(mm)L CD(mm)L AB(mm)L AC(mm)n1r/minJ S3kg.m2J S4kg.m23 510 575 170 140 375 80 0.22 0.16方案号G1(kg)G3(kg)G4(kg)G5(kg)P工作(N)P空程(N)δ3 14 75 55 80 1400 140 1/40二.分析过程:通过CAD制图软件制作的六杆机构运动简图:图2 六杆机构CAD所做的图是严格按照题所给数据进行绘制的。
并机构运动简图中活动构件的序号从1开始标注,机架的构件序号为0。
每个运动副处标注一个字母,该字母既表示运动副,也表示运动副所在位置的点,在同一点处有多个运动副,如复合铰链处或某点处既有转动副又有移动副时,仍只用一个字母标注。
见附图2所示。
1.机构的结构分析如附图1所示,建立直角坐标系。
机构中活动构件为1、2、3、4、5,即活动构件数n=5。
A、B、C、D、F处运动副为低副(5个转动副,2个移动副),共7个,即P l=7。
则机构的自由度为:F=3n-2P l=3Χ5-2Χ7=1。
拆基本杆组:(1)标出原动件1,其转角为φ1,,转速为n1,如附图3-a所示;(2)试拆出Ⅱ级杆组2—3,为RPR杆组,如附图3-b所示;(3)拆出Ⅱ级杆组4—5,为RRP 杆组,如附图3-c所示。
由此可知,该机构是由机架0、原动件1和2个Ⅱ级杆组组成,故该机构是Ⅱ级机构。
图3-a 图3-b 图3-c2.平面连杆机构运动分析和动态静力分析:JYCAE软件介绍应用基本杆组法开发的计算机辅助平面连杆机构运动分析和动态静力分析软件—JYCAEYL,适用于平面II级机构的分析。
JYCAEYL采用界面化输入,只要按照界面要求正确输入机构各己知参数和机构运动简图中表示运动副、点和构件序号的字母和数字,软件就可给出计算结果和各种根据计算结果绘出的曲线图形。
在使用JYCAEYL对某一机构进行分析时,首先要画出该机构的运动简图。
选择合适的平面坐标系,将机构置于选定的平面坐标系中。
由于计算分析是使用计算机来进行的,因此画机构运动简图时对尺寸比例的要求并不严格。
机构运动简图中活动构件的序号应从1开始标注,序号应连续,不得有重号。
机架的构件序号为0。
每个运动副处标注一个字母,该字母既表示运动副,也表示运动副所在位置的点(铰链中心点或移动副导路中心线上的点)。
若在同一点处有多个运动副,如复合铰链处或某点处既有转动副又有移动副时,仍然只用一个字母标注。
在JYCAEYL 界面中输入时,要将运动副处标注的字母和每个运动副所联接的两个构件的序号按界面要求分别输入,这样JYCAE会自动将各个运动副区分开来。
构件上的点(如质心点、力作用点以及其他被关注的点)用字母或字母后加数字来表示,如S3表示构件3的质心。
JYCAE软件原始数据的输入运行JYCAE软件,输入原始数据。
在打开的JYCAE界面中用鼠标左键单击“运行”按钮,即会出现如附图4所示的“原始数据”输入页面。
在该页面左半边的各输入空格内可分别输入机构的活动构件数、转动副数、移动副数、己知长度值总数和机构的自由度。
除了活动构件数外,其余四个输入空格旁都各有一个“确定”按钮,点击每一个“确定”按钮,页面右半边就会显示出对应的输入框。
输入了转动副数目后,点击“确定”按钮,右半边页面显示出转动副数据输入框(见附图4)。
在该输入框的“活动铰链数”输入空格中输入活动铰链数后,点击“确定”按钮,“活动铰链数”输入栏下相应数目的空格就会变为可用(输入空格呈白底色为可用,灰底色为不可用),供输入表示铰链的字母(铰链名)和铰链所联接的两个活动构件的序号。
同时,“固定铰链数”输入空格中自动显示出数值,此数值等于转动副总数减去活动铰链数图4 “原始数据”输入界面移动副输入框(见附图5-a)与转动副输入框类似,只是当移动副所联接的构件之一为机架时,应在固定导路中心线上确定一给定点(此点为机架上的点),在输入框中输入其坐标值。
此例中选C点为移动副F在固定导路上的给定点,坐标为(0,0)。
长度值输入框(见附图5-b)用来输入机构中各构件上的不可变长度值,即构件上一点到另一点的距离,如构件上各铰链点间的距离,铰链中心到质心点或力作用点间的距离等。
机构在运动时,这些距离(长度)是不会改变的。
原动件参数输入框(见附图5-c)提供三种类型原动件的运动参数输入,分别为:(1)绕定轴转动的原动件(如附图1所示机构中若以构件1作为原动件);(2)沿固定导路移动的原动件(如附图1所示机构中若以滑块5作为原动件);(3)沿运动导杆移动的原动件。
原动件绕定轴转动时,其转角为原动件上某一指定线与x轴正方向的夹角。
以x轴正方向为始边向指定线度量,逆时针方向为正值,顺时针方向为负值。
角速度和角加速度也以逆时针方向为正;反之为负。
原动件初始角为起始位置原动件上指定线与x轴正方向间的夹角,其值可正可负。
原动件总转角、转角增量和角速度这三者的正、负号应相同。
图5-a 移动副输入框图5-b 已知长度输入值图5-c 原动件参数输入框点击“原始数据”输入页面中的“存入数据”按钮,可将当前输入的数据储存起来。
点击“取出数据”按钮,就可将存入的数据取出并重新显示在原来的输入空格中。
3.机构的运动分析“原始数据”输入页面中的所有数据输入完毕后,点击该页面的“运动分析”按钮,就会出现如附图7-a所示的“选取基本单元”页面。
用JYCAE软件对机构进行运动分析时,需要将机构在基本杆组的基础上划分成由构件或构件组组成的若干个基本单元,如附图6所示。
附图6(a)所示为角运动已知的构件,可以分析绕定轴转动构件上点的运动,也可计算任何做平面运动的构件上点的运动;附图6(b)所示为可变长二杆组(RRR杆组),用于分析铰链二杆组或刚体上不共线的三点间的运动问题,也可用于分析摆动油缸机构或其他具有变杆长的运动问题;附图6(c)所示为两点运动已知的构件,用于单个构件上已知两点的运动,求任一其他点的运动问题;附图6(d)所示为三点共线的构件(导杆),用于当导杆及滑块上各有一点的运动已知时,求导杆上另一个位于上述两点连线上的点的运动,也可用于刚体上有三点共线时,由已知两点求第三点的运动问题;附图6(e)所示为输入导杆,用于导杆的角运动已知时,求滑块的绝对运动和对导杆的相对运动问题;附图6(f)所示为摆动导杆,用于计算构件的角运动参数,也适用于分析角运动为输出时的无偏置导杆组(图中,K点可为滑块上的点,也可固结在JK杆上);附图6(g)所示为偏置导杆,用于分析带有偏置量的导杆、滑块的运动。
附图6中各单元G点的运动参数(所谓点的运动参数,是指点的x、y方向的坐标分量、速度分量和加速度分量)未知,称G点为待求点。
J、K两点的运动参数已知,称为参考基点。
图6平面Ⅱ级机构运动分析基本单元对于每个基本单元,都可根据其中的已知运动参数求出其未知的运动参数。
每个基本单元中求解出的未知运动参数又可成为另一个基本单元中的已知运动参数。
程序依次对机构中每个基本单元进行求解,就可计算出机构中所有需要求解的运动参数。
点击“选取基本单元”界面中与机构中某个基本单元相对应的基本单元类型图标按钮,在随后打开的该类型基本单元输入框的输入空格中输入相应的字母和数值,然后点击“确定”按钮,就完成了对机构中该基本单元信息的输入。
程序在运行时,对机构中各基本单元的求解顺序按照各类型基本单元输入框中“调用顺序”空格里所填的数字序号从1开始依次进行,求解顺序与对各类型基本单元输入框进行输入的先后次序无关。
对机构中各单元的求解顺序会显示在“选取基本单元”界面的“求解顺序”栏中。
具体输入如下:“原始数据”输入页面中的所有数据输入完毕后,点击该页面的“运动分析”按钮,就会出现见附图7-a所示的“选取基本单元”页面。
按照题所求对基本单元进行调用,调用那个基本单元就点击该基本单元,对新出来的框图进行填写,此题目先后分别调用基本单元1见下图7-b.基本单元4见下图7-c.基本单元6见下图7-d.基本单元5见下图7-e,而且调用顺序会显示在“选取基本单元”界面的“求解顺序”栏中,见附图7-f。
有些类型的基本单元会被调用多次,因此对其输入框要进行多次输入,每次输入时只需重新改填各输入空格中的字母或数字,然后点击“确定”按钮关闭输入框即可。
图7-a 基本单元选取框图7-b 基本单元1参数输入框图7-c 基本单元4参数输入框图7-d 基本单元5参数输入框图7-e 基本单元6参数输入框图7-f “选取基本单元”界面“基本单元”选取与信息输入完成后,本题选取了7个“基本单元”,结果如附图7-f所示。
点击“运算”按钮,JYCAEYL就会按指定的调用顺序依次对机构中各单元进行运动分析计算并给出计算结果,如附图8所示。
图8 “运动分析结果”界面分别点击“运动分析结果”界面下方“构件角运动参数”和“长度变化参数”按钮,界面中的表格就分别给出各构件角运动参数值或长度变化参数值。
表格中构件转角的单位为“度”,角速度和角加速度的单位分别为rad/s和rad/s2,长度单位为m,长度变化速度和长度变化加速度的单位分别为m/s和m/s2。
各数值正、负号的意义同前所述。
整理界面表格中的数值如表3-1,表3-2所示:表3-1 点F的x、y方向的运动参数表3-2 构件3的运动参数点击“运动分析结果”界面下方的“轨迹及运动线图”按钮,界面的右上方将出现图形输出区,见图9. 分别在界面左边的输入空格中输入点名、构件序号或长度名并点击各自的“确定”按钮,就可分别显示出点的运动轨迹曲线、点的运动线图、构件的角运动线图和长度变化规律线图。