svpwm永磁同步电机的设计
- 格式:ppt
- 大小:359.00 KB
- 文档页数:24

基于SVPWM的永磁同步电机直接转矩控制系统的研究永磁同步电机直接转矩空间矢量脉宽调制Matlab/Simulink1引言空间矢量脉宽调制(SVPWM)技术是在一个控制周期内,通过相邻基本电压矢量和零电压矢量合成得到所需的任意电压矢量,实现电压矢量的线性连续可调的技术[1,2]。
本文运用了一种基于空间矢量脉宽调制(SVPWM)的永磁同步电机的直接转矩控制算法,其原理是根据转矩和定子磁链的误差,通过驱使误差为零的原则确定参考电压空间矢量,然后通过SVPWM技术合成该矢量[3],由于在下一个控制周期内,采样时刻的电压和磁链误差可以得到补偿,因此转矩和磁链的误差始终能够控制在一个很小的范围,二者的脉动很小。
2SVPWM的基本原理交流电动机输入三相正弦电流的最终目的是在电动机空间形成圆形旋转磁场,从而产生恒定的电磁转矩。
因此,如果把逆变器和交流电机看成一个整体,控制逆变器的工作状态以此来产生跟踪圆形的旋转磁场,能够达到很好的控制效果。
SVPWM将逆变器和交流电机视为一个整体观念,把三相对称的正弦波电源供电时交流电机产生的理想磁链圆作为参考对象,通过选择三相逆变器的六个功率开关器件的特定开关模式,生成SVPWM脉宽调制波,从而使电机的实际磁链尽可能地逼近理想的圆形,产生恒定的电磁转矩[4]。
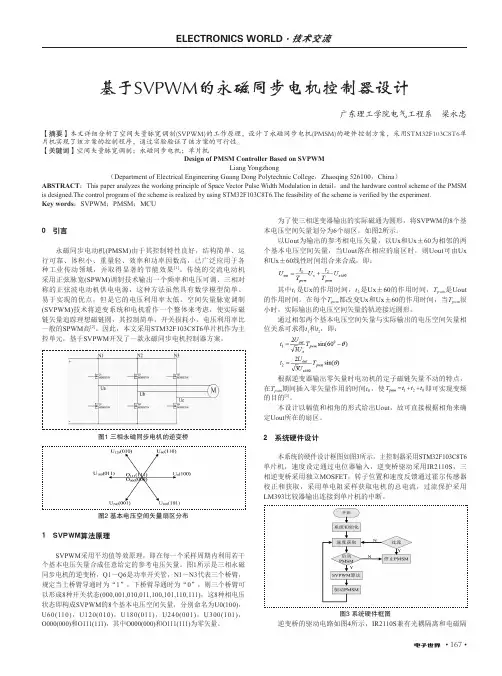
由电压源型逆变器产生的8个基本电压空间矢量如图1所示。
6个非零基本电压空间矢量将整个电压空间矢量平面区域分成六个60°的扇区Ⅰ-Ⅵ。
图1 电压矢量在空间的分布图交流电动机仅由常规的逆变器供电,得到的是六边形的旋转磁场。
这是因为在一个周期内逆变器只切换六次工作状态,因此只能形成6个电压空间矢量。
如果想获得更多边线或逼近圆形的旋转磁场,就必须在每一个π/3期间内出现多个工作状态,以形成更多的相位不同的电压空间矢量。
为此,采用线性组合法控制SVPWM的开关时间,改造后的逆变器可以得到逼近圆形的旋转磁场。
3SVPWM控制算法的研究及实现原理3.1 参考电压矢量所在扇区的判断由图1所示,SVPWM分为六个扇区,电压矢量所在的扇区是由Urefα和Urefβ决定的。
• 167•基于SVPWM的永磁同步电机控制器设计广东理工学院电气工程系 梁永忠【摘要】本文详细分析了空间矢量脉宽调制(SVPWM)的工作原理,设计了永磁同步电机(PMSM)的硬件控制方案,采用STM32F103C8T6单片机实现了该方案的控制程序,通过实验验证了该方案的可行性。
【关键词】空间矢量脉宽调制;永磁同步电机;单片机Design of PMSM Controller Based on SVPWMLiang Yongzhong(Department of Electrical Engineering Guang Dong Polytechnic College ,Zhaoqing 526100,China )ABSTRACT :This paper analyzes the working principle of Space Vector Pulse Width Modulation in detail ,and the hardware control scheme of the PMSM is designed.The control program of the scheme is realized by using STM32F103C8T6.The feasibility of the scheme is verified by the experiment.Key words :SVPWM ;PMSM ;MCU0 引言永磁同步电动机(PMSM)由于其控制特性良好,结构简单、运行可靠、体积小、重量轻、效率和功率因数高,已广泛应用于各种工业传动领域,并取得显著的节能效果[1]。
传统的交流电动机采用正弦脉宽(SPWM)调制技术输出一个频率和电压可调、三相对称的正弦波电动机供电电源,这种方法虽然具有数学模型简单、易于实现的优点,但是它的电压利用率太低。
空间矢量脉宽调制(SVPWM)技术将逆变系统和电机看作一个整体来考虑,使实际磁链矢量追踪理想磁链圆,其控制简单,开关损耗小,电压利用率比一般的SPWM 高[2]。
基于SVPWM永磁同步电机控制系统的建模与仿真张海啸 王淑红(太原理工大学电气与动力工程学院,太原 030024)摘要本文研究永磁同步电机(PMSM)矢量控制系统。
采用空间电压矢量脉宽调制(SVPWM)算法,在Matlab/Simulink环境下,通过对坐标系转换、SVPWM逆变器、速度控制器等功能模块的建立与组合,构建了PMSM控制系统的速度和电流双闭环仿真模型。
仿真结果证明了该系统模型具有很好的静态、稳态性能。
关键词:永磁同步电机;空间矢量脉宽调制;仿真Modeling and Simulation of PMSM Control System Based on SVPWMZhang Haixiao Wang Shuhong(Taiyuan University of Technology, Taiyuan 030024)Abstract Vector control of PMSM was studied in the paper.A novel method for modeling and simulation of PMSM system in Matlab had been proposed. In Matlab/ Simulink , the independent functional blocks and such as vector controller block , hysteresis current controller block and speed controller,ect.,had been modeled. By the organic combination of these blocks , the double loop of control system model of PMSM could be easily established. The reasonability and validity had been testified by the simulation results.Key words:PMSM;SVPWM;modeling and simulation1引言永磁同步电机(PMSM)广泛应用于诸如高性能机床进给控制、位置控制、机器人等领域。
中图分类号:T M 351 T M341 文献标识码:A 文章编号:100126848(2006)0920038204采用S VP WM 的永磁同步电动机系统建模与仿真安群涛,李 波,王有琨(哈尔滨工业大学电气工程系,哈尔滨 150001)摘 要:为了兼顾永磁同步电动机的成本和控制性能,在分析永磁同步电动机数学模型的基础上,基于Matlab/Si m ulink 建立了永磁同步电动机磁场定向控制系统仿真模型。
重点阐述了电压空间矢量脉宽调制(S V P WM )的原理及算法,给出了利用Si m ulink 的实现方法。
该模型较之以往论文给出的滞环电流控制型永磁同步电动机系统更具有普遍性和实用性。
仿真结果证明了该模型的有效性,并验证了其他控制算法,为永磁同步电动机系统的设计和调试提供了思路。
关键词:永磁同步电动机;磁场定向控制;建模;空间矢量脉宽调制M ode li ng an d S i m ula t ion of P M S M Syste m Usi n g SVPWMAN Qun 2tao,L I Bo,WANG Y ou 2kun(D e p t .of Electrical Engineering,Harbin Institute of Technol ogy,Harbin 150001,China)ABSTRAC T:A t the basis of analysis ofm odel of Per m anentMagnet Synchr onousMot or,this paper es 2tablished the si mula tion model of field 2orientated control syste m of P MS M ba sed on Matlab /Si m ulink .Princ i p le of S VP WM was expa tiated,and i m ple m ent m ethod was given in this pa per .The reas onabilityand validity have been testified by the si m ulation r e sults,other contr ol a rithm etic can be validated andthis method offers a thought w ay f or de signing and debugging ac tual mot ors .KEY W O RDS:P MS M;Field 2orienta ted contr ol;Syste m m odeling;S V P WM收稿日期5226修稿日期625250 引 言永磁同步电动机(P MS M )控制特性良好,结构简单、运行可靠、体积小、重量轻、效率和功率因数高,已经逐步取代直流伺服电动机而用于高性能的伺服系统中[1]。


永磁同步电机控制的SVPWM算法—扇区判断与切换时间确定SVPWM的算法及仿真研究1 引⾔ 随着电⼒电⼦技术和微处理器的发展,脉宽调制(pulse width modulation,pwm)技术在电⼒传动领域得到了⼴泛应⽤。
在各种pwm技术中,空间⽮量pwm(space vector pwm,svpwm)技术以其物理概念清晰、算法简单、电压利⽤率⾼且易于数字化实现等特点,在⾼性能全数字化交流调速系统中得到了较多应⽤[1]。
本⽂⾸先介绍了svpwm的基本原理,在分析机理的基础上详细推导了svpwm算法,然后在matlab/simulink环境下通过利⽤功能模块和编写基于m⽂件的s函数相结合的⽅法实现了该算法。
2 空间⽮量脉宽调制原理[2] 三相电压型逆变器共有6个功率开关管,任何时刻有且仅有3个开关器件导通,⽽且上、下桥臂的开关器件是互锁的,因此逆变器实际上只有8个基本的开关状态。
若⽤数字“1”表⽰相应上桥臂开关器件处于导通状态,⽽下桥臂开关器件处于关断状态;⽤数字“0”表⽰相应上桥臂开关器件处于导通状态,⽽下桥臂开关器件处于关断状态。
则这8种开关状态可⽤8个开关相量表⽰,分别为“000,100,110, (101)111”。
对应的8个电压空间⽮量如图1所⽰。
图1 三相逆变器输出电压空间⽮量图 图1中的电压空间⽮量包括6个幅值相等、相位互差π/3电⾓度的⾮零⽮量u1~u6,它们将复平⾯分成了6个扇区i~vi;还有两个位于复平⾯中⼼的幅值为零的零⽮量u0、u7。
为了便于研究,将三相坐标系转换到两相α-β直⾓坐标系。
svpwm线性组合的控制策略就是通过合理控制两个相邻⾮零⽮量及零⽮量之间的切换,在每个开关周期内去逼近旋转参考⽮量uref,使合成电压⽮量的轨迹逼近圆形,进⽽得到如图1所⽰的六个扇区。
以参考⽮量uref位于扇区i为例,在⼀个采样周期内uref可由⾮零电压⽮量u1、u2及零电压⽮量u0、u7合成,通过控制逆变器输出电压⽮量u1、u2 及u0、u7的切换时刻,可以逼近uref。

浅谈永磁同步电机SVPWM控制方法空间电压矢量脉宽调制SVPWM控制已经成为三相逆变器中最重要的调制方式。
它的数学建型是以电机统一理论和电机坐标轴变换理论为基础的,物理意义直观,数学模型简单,并具有抑制转矩脉动、噪音低、电压利用率高等优点。
为防止逆变器同一桥臂上的两个功率管发生直通造成短路,必须设置死区时间。
但这会使逆变器出现死区效应,导致输出电流波形发生畸变,输出转矩减小,特别是在低速轻载时稳态转矩脉动,容易引起电机振荡,甚至无法正常工作。
针对在非理想特性下造成的死区效应,本文提出了根据将三相电流分成6个区域,并在各区域中按相电流方向对三相输出电压进行死区补偿措施,此方法不仅提高了逆变器低频轻载时的输出性能,且不需附加额外硬件,实现简单,易于模块化。
1 永磁同步电机SVPWM死区效应分析图1为永磁同步电机逆变器主电路结构图。
下面以a相电流为例进行死区效应分析,电流方向为桥臂流向负载(即正向电流)。
图1中,Vdc为直流电源;Cd为中间直流回路滤波电容;D1~D6为6个续流二极管;T1~T6为6个功率管。
在死区期间内,三相电机输出电压产生的误差方向由电流方向决定。
图1 永磁同步电机逆变器主电路结构如图2所示,图2(a)为a相电流正向时输出电压一个开关周期内的波形,图2(b)为反向情况。
实线为实际获得电压波形,虚线为参考相电压波形,点划线为需补偿参考电压。
(a)ia正向的情况(b)ia反向的情况图2 a相参考电压和输出电压波形如图2(a)所示,当a相电流流向负载(即正向电流)时,上管断开,下管续流,存在二极管导通压降Vd,使得uao=-Vdc/2-Vd;参考相电压反向后,上管经过死区时间和开通延时(td+ton)后导通,电流经上管流向负载,此时存在开关器件导通压降Vsat,使得uao=Vdc/2-Vsat。
同理可得当电流由负载流向电源(即反向电流)时uao的情况。
根据参考电压伏秒面积等于补偿后伏秒面积原则,若要误差电压为零,当电流为正向时ΔV=[(1-D)Ts+τ]Vd+τVdc+(DTs-τ)Vsat-tcom+(Vdc+Vd-Vsat)=0得到tcom+={τVdc+(DTs-τ)Vsat+[(1-D)Ts+τ]Vd}/(Vdc+Vd-Vsat)taon+=t※aon+tcom+同理,可得出电流反向时:tcom-={τVdc+[(1-D)Ts-τ]Vsat+(DTs+τ)Vd}/Vdc+Vd-Vsattaon-=t※aon+tcom-式中:ΔV——误差电压Vdc——母线直流电压Vsat——开关器件的导通压降Vd——并联二极管的导通压降ton——开关器件的等效开通时间toff——开关器件的关断延迟时间td——死区时间Ts——开关周期t※aon——上管理想导通时间taon+,taon-——正反向电流的上管实际导通时间tcom+,tcom-——正反向电流的实际补偿时间D——占空比,D=t※aon/Tsτ——时间误差,τ=td+ton-toff,b、c相情况以此类推图3为系统中死区补偿方案的矢量控制图。

SVPWM电机驱动模型分析报告目录:SVPWM电机驱动模型分析报告 (1)一:整个电机模型的工作原理 (2)1.永磁同步电机逆变器前后原理与功能 (2)2.便于控制的PID数据以及便于计算的SVPWM输入数据的来龙及原理: (3)3.SVPWM的计算过程及PMSM模型: (4)二:各个模块的工作原理、输出波形、配置参数 (5)1.电机模型整体框架: (5)2.仿真电机框图各个模块功能、标准波形、配置参数说明: (7)I-I-CLARK反变换,I-PARK反变换: (7)II-系统磁通量: (8)III-上层控制算法: (8)IV-SVPWM模块: (8)V-逆变器: (9)VI-PMSM电机模型: (9)三:simulink仿真相关注意事项 (11)预备知识:(1)MATLAB的相关知识。
主要有M文件编程、S-function函数的编写、Simulink 框图仿真、基本的Simulink模块的使用。
(2)SVPWM驱动算法,交流永磁同步电机的构造原理。
(3)永磁同步电机逆变器的驱动原理。
一:整个电机模型的工作原理1.永磁同步电机逆变器前后原理与功能在这里不详细讲解整个电机的工作原理。
从大体上讲下SVPWM控制方式的工作原理。
更加详细具体的讲解可以参考SVPWM永磁同步矢量控制的原理。
SVPWM是交流无刷永磁同步电机的前端控制算法,为什么需要SVPWM呢?下面是交流永磁电机的模型:浅显的理解是:永磁同步电机在转动时,内部的磁通是正弦波变化(这和电机的内部结构相关),因此为了稳定精确的控制电机,外部的输入电压也需要按正弦波变化,这样才能稳定的跟随。
为了输出按正弦波变化的电压,要借助逆变器。
下图是逆变器的构造:逆变器的后面接通了PMSM电机,逆变器的输入参数VDC作为电机的电压,此参数越大,电机最大的转速越大。
逆变器由a-a’ b-b’ c-c’三相开关构成,开关的不同通断,使得电机的三端产生不同的电压:看似离散的电压,将这电压值换算成一个周期的平均量(相当于计算一个周期的功率)当然每个电压的保持时间也是要精确控制的,那么就是一个很好的正弦波形,在三相开关的频率加大上,开关切换速度高,切换时间精确下,波形就越光滑,效果更好。
基于SVPWM的永磁同步电机控制目录1. 概述 (1)2. 仿真各模块介绍及参数设置 (3)3. 仿真结果 (6)4. MATLAB学习心得 (8)1.概述本次任务为设计一种基于SVPWM的永磁同步电机转速控制系统,采用PID控制算法,可以实现对永磁同步电机转速准确控制,仿真模拟了以下三个步骤:电机空载启动,空载调速和电机突然带载。
设计要求:1.要求对电机控制为dq轴电流解耦控制。
2.仿真要求电机的转速有较快的响应速度,且具有较好的稳定性。
3.可以实现无级调速,且仿真的误差与设定转速误差很小。
电机控制仿真的Simulink示意图和系统组成框图如图1-1和1-2所示:图1-1基于SVPWM永磁同步电机控制仿真图1-2基于SVPWM永磁同步电机控制系统组成框图系统是由转速调节模块、负载调节模块、PID控制模块、SPVPWM信号产生模块、永磁同步电机组成。
在用户预先设好转速与加载时间及大小后,控制系统就可以对永磁同步电机进行仿真。
具体原理如下:仿真中为实现对电机的控制,首先是将预计转速输入到PID模块中,产生控制晶闸管通断的SVPWM信号,再由SVPWM信号装置产生PWM信号以追踪永磁同步电机的磁链圆实现对永磁同步电机的转速控制。
以上所述为控制的前向通道,控制的反馈是将电机的q轴和d轴电流分两个闭环反馈给PID控制模块,用PID算法实现对永磁同步电机的精准控制。
MALTAB及其在电气工程中的应用2.仿真各模块介绍及参数设置2.1 PID控制模块PID控制模块是本次仿真的主要控制模块,本次仿真采用的是零d轴电流控制,通过调节q轴电流,控制电机转速,采用双闭环系统设计,将从永磁电机读取到的d轴电流和q轴电流以及当前电机的转速反馈回PID控制模块中。
PID控制模块的示意图如图2-1所示。
图2-1 PID控制模块示意图对电机转速和d轴电流的PID控制都是将实际的量与给定的控制量的对比,将误差传给PID模块,经对转速的PID控制以后,输出的为q轴电流值,将实际q轴电流与PID输出的对比结果再将控制信号输入给SVPWM产生装置。
三相永磁同步电动机直接转矩控制技术及仿真研究 1引言随着社会实际生产要求的不断提高,现代电机控制技术也不断得以升级。
继矢量控制之后,1986年日本I.TakhaShi 和德国M.Depenbrock 分别提出了直接转矩控制技术。
直接转矩控制(Direct Torque Control ,DTC)是基于定子磁场定向和电压空间矢量分析的方法,根据转矩偏差、磁链偏差及定子磁链的空间位置,选择合适的电压矢量。
这项技术的问世,以其新颖的控制思想、简洁明了的系统结构、优良的动静态性能等优点受到普遍关注并被广泛研究。
常规的DTC 方案其实是一种Bang —Bang 控制方法:针对定子磁链幅值和转矩偏差以及磁链的空间位置, 在一个控制周期内,选择和发出单一空间电压矢量,这个电压矢量要同时控制磁链和转矩的误差方向,而忽略了转矩和磁链误差大小,从而经常造成转矩和磁链脉动,不能达到期望的最佳控制效果。
减小滞环容差可以减小脉动,但又会导致逆变器的开关频率增大,开关损耗随之增加;矢量细分法改善了磁链轨迹,但结构相对复杂。
矢量调制 (Space V oltage Vector Modulation)是在一个控制周期内,通过相邻电压矢量和零矢量合成得到所需的任意电压矢量,实现电压矢量的连续可调。
本文在分析了直接转矩控制原理(DTC)和空间电压矢量脉宽调制技术(SVPWM)的基础上,做了基于磁链空间电压矢量脉宽调制技术的永磁同步电机直接转矩控制技术的仿真。
1直接转矩控制原理永磁同步电机在转子坐标系下的数学模型:⎥⎦⎤⎢⎣⎡ψ+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡f q d q d q d q d i i pL R L L pL R u u ωωω0 (1) []sm q d s sm q f q d sn e L L L L L P t δδ2sin )(sin 243-ψ-ψψ= (2)[]t sm q d s sm q f q d s n t t d d L L L L L P d d eδδδ2cos )(2cos 243-ψ-ψψ= (3)式中:q d q d q d L L i i u u ,,,,,——定子电压、电流、电感在q d ,轴上的分量;s f ψψ,——励磁磁链和定子磁链;p P t n e ,,——电磁转矩、转子极对数和微分算子;δsm ——负载角;式(2)表明,电机参数确定后,在实际运行中,永磁同步电机转子上励磁磁场的磁链幅值一般为恒值,为保证充分利用电动机铁心,通常要使定子磁链的幅值为额定值,这样就可以直接通过控制负载角δsm 的大小来控制电磁转矩的大小,这就是DTC 的核心思想。
基于SVPWM的永磁同步电机调速系统设计宋宏帅;王佐勋【摘要】在掌握空间矢量脉宽调制原理(SVPWM)的基础上,建立永磁同步电机(PMSM)的双闭环调速系统,采用电压空间矢量调制获取三相PWM波形的脉冲宽度,进而通过电压源逆变器对电机速度进行调节。
搭建系统仿真模型,分析了基于SVPWM的PMSM调速系统的可行性。
以单片机STM32F103为控制核心进行实验设计,以实验结果来表明该PMSM调速控制系统在实际应用中的有效性。
【期刊名称】《齐鲁工业大学学报:自然科学版》【年(卷),期】2018(032)002【总页数】6页(P27-32)【关键词】空间矢量脉宽调制;永磁同步电机;数学模型;MATLAB仿真【作者】宋宏帅;王佐勋【作者单位】齐鲁工业大学(山东省科学院)电气工程与自动化学院,济南250353;齐鲁工业大学(山东省科学院)电气工程与自动化学院,济南250353;【正文语种】中文【中图分类】TM341随着现科学技术的快速速发展,永磁同步电动机(PMSM)因其具有简单的结构、强大的过载能力、快速的响应速度等优点,已经在伺服领域中占据重要地位。
因此对于PMSM的调速系统的要求也变得越来越高[1]。
SVPWM算法具有快速准确、效率高、易于实现数字化的优点。
因此对基于SVPWM的PMSM调速系统的研究具有重要的意义。
先对SVPWM的知识进行分析总结,然后介绍基于SVPWM的PMSM调速控制系统的实现过程,接着对该PMSM调速系统进行Matlab/Simulink仿真,最后以单片机STM32F103为核心进行实验设计。
仿真和实验结果表明了基于SVPWM的永磁同步电机调速控制系统的有效性,在相关电机调速系统的设计中具有重要的指导意义。
1 空间矢量脉宽调制(SVPWM)空间矢量调制就是根据确定位置的有限个空间矢量组合作用来产生满足任意位置和一定幅值范围需要的空间矢量的过程[2]。
空间矢量调制有两种情况,分别为电压空间矢量调制和电流空间矢量调制[3]。