单相电机的设计
- 格式:pdf
- 大小:806.05 KB
- 文档页数:36
单相串励电机课程设计一、课程目标知识目标:1. 学生能理解单相串励电机的基本结构、工作原理及分类。
2. 学生能掌握单相串励电机启动、运行、制动的基本方法。
3. 学生能了解单相串励电机在实际应用中的优缺点。
技能目标:1. 学生能运用所学知识,分析并解决单相串励电机在实际应用中出现的问题。
2. 学生能通过实际操作,掌握单相串励电机的接线、调试及维护方法。
3. 学生能运用绘图工具,绘制单相串励电机的电路图。
情感态度价值观目标:1. 学生通过学习,培养对电机工程的兴趣,提高学习积极性。
2. 学生能够认识到电机在日常生活和国民经济发展中的重要性,增强社会责任感。
3. 学生在团队协作中,培养沟通、交流、合作的能力。
课程性质:本课程为电机原理与应用的实践课程,旨在让学生通过理论学习与实践操作,掌握单相串励电机的基本知识和应用技能。
学生特点:学生已具备基础电学知识,有一定的动手操作能力,但对电机原理及应用的掌握程度不一。
教学要求:结合学生特点,注重理论与实践相结合,提高学生的实际操作能力和问题解决能力。
通过课程学习,使学生在知识、技能和情感态度价值观方面得到全面提升。
二、教学内容1. 单相串励电机的基本结构:介绍单相串励电机的定子、转子、换向器、电刷等主要部件及其作用。
教材章节:第一章第三节2. 单相串励电机的工作原理:讲解单相串励电机的工作原理,包括磁场的产生、电流的流动及电机转动原理。
教材章节:第一章第四节3. 单相串励电机的分类及优缺点:介绍单相串励电机各类别及特点,对比分析其优缺点。
教材章节:第二章第一节4. 单相串励电机的启动、运行与制动:讲解单相串励电机的启动方法、运行特点及制动原理。
教材章节:第二章第二节5. 单相串励电机的实际应用:分析单相串励电机在日常生活和工业生产中的应用实例。
教材章节:第二章第三节6. 单相串励电机的接线、调试与维护:教授单相串励电机的接线方法、调试技巧及日常维护要点。
教材章节:第三章7. 实践操作:安排学生进行单相串励电机的接线、调试及运行实验,巩固理论知识,提高实际操作能力。

单相无刷电机的控制系统设计单相无刷电机是一种广泛应用于家电、工业设备和汽车等领域的电机类型,它具有体积小、效率高、转速稳定等优点,因此在各种领域中得到了广泛应用。
单相无刷电机的控制系统设计是非常重要的,它直接影响到电机的性能和稳定性。
本文将从电机的工作原理、控制系统的要求、控制算法的选择等方面进行分析和探讨,以期为单相无刷电机的控制系统设计提供一些参考。
一、单相无刷电机的工作原理单相无刷电机是一种采用电子换相技术来完成电机转子位置检测和换向控制的电机。
其工作原理如下:在电机固定部分安装一个霍尔传感器,用来检测电机转子的位置,然后通过控制器来控制电机的相序和相电流以实现电机的正常转动。
由于无刷电机不需要通过碳刷来实现换向,因此可以避免了碳刷磨损和火花,使得其具有更高的可靠性和使用寿命。
二、单相无刷电机控制系统的要求1. 速度控制:单相无刷电机通常需要实现精确的速度控制,因此控制系统需要具备较高的控制精度和响应速度。
2. 转矩控制:在一些应用场景中,需要对电机的输出转矩进行精确控制,因此控制系统需要具备良好的转矩控制能力。
3. 响应速度:控制系统需要能够快速响应外部控制信号,实现快速启动和停止。
4. 鲁棒性:控制系统需要具备一定的鲁棒性,能够在各种工作环境下稳定可靠地工作。
三、单相无刷电机控制系统的设计1. 控制器选择:针对单相无刷电机的控制系统,通常可以选择使用专门的电机控制器,也可以选择使用通用的运动控制芯片。
控制器需要具备相序控制功能、驱动电流控制功能以及霍尔传感器信号处理功能。
2. 控制算法选择:常用的单相无刷电机控制算法有霍尔传感器反馈算法、电压模式控制算法和磁场定向控制算法等。
具体选择哪种算法需要考虑电机的具体应用场景和性能要求。
3. 驱动电路设计:单相无刷电机的控制系统需要配合相应的功率放大电路来驱动电机,通常采用MOSFET功率放大电路来实现对电机的准确控制。
4. 信号处理:控制系统需要对霍尔传感器采集到的信号进行精确的处理,以获取准确的转子位置信息,并将其用于相序控制和换向算法的实现。
单相电动机的设计原理和设计方法单相电动机是广泛应用于家用电器、工业设备和商业设施等领域的重要动力装置。
它的设计原理和设计方法对于确保电动机的性能和效果至关重要。
本文将探讨单相电动机的设计原理和设计方法,以帮助读者深入了解该领域的相关知识。
一、设计原理1. 工作原理单相电动机的工作原理是基于电磁感应和电流的相位差产生转矩。
当电动机接通电源时,电源中的交流电产生磁场,而定子绕组也会产生磁场。
这两个磁场之间存在相位差,导致转子产生转矩。
通过改变定子绕组或转子的结构和参数,可以实现不同转矩和转速的要求。
2. 磁场产生单相电动机中,磁场的产生是通过定子绕组中的电流流过导线产生的。
定子绕组通常采用螺旋形或分布式绕组。
当电流流过绕组时,产生的磁场会与电源中的磁场相互作用,从而产生力矩。
3. 起动和运行单相电动机通常需要额外的起动装置来帮助启动。
启动装置可以是启动电容器和起动继电器等器件。
在启动阶段,这些装置能够帮助电动机产生较大的起动转矩,以克服静摩擦力和转子惯性等阻力。
一旦电动机启动,这些启动装置会自动断开。
二、设计方法1. 定子设计定子是单相电动机的主要部分之一,其设计对电动机的性能和效果有着重要的影响。
在定子设计中,需要考虑以下因素:- 铁心设计:选择合适的铁心材料和形状,以提高磁路的导磁性能和减小磁滞损耗。
- 绕组设计:确定定子绕组的匝数、导线直径和绕组方式,以满足所需的电流和电压要求。
- 绕组布局:确保绕组的布局紧凑且对称,以减小电阻损耗和电磁干扰。
2. 转子设计转子是单相电动机中的另一个重要部分,它的设计也对电动机的性能和效果有着重要的影响。
在转子设计中,需要注意以下因素:- 材料选择:选择具有良好导电性能和机械强度的材料,例如铜、铝等。
- 结构设计:根据要求选择合适的转子结构,例如鼠笼型转子或绕组型转子。
- 平衡设计:确保转子的质量均匀分布,避免不平衡引起的震动和噪音。
3. 效率和功率因数优化在单相电动机设计中,除了满足性能要求之外,还需要优化效率和功率因数。
单相无刷电机的控制系统设计-回复单相无刷电机是一种非常常见的电机类型,广泛应用于家电、工业设备和汽车领域等。
它具有体积小、重量轻、效率高、噪音低等优点,因此受到了广大用户的喜爱。
然而,单相无刷电机的控制系统设计是一个非常关键的问题,直接影响到电机的性能和使用效果。
本文将以单相无刷电机的控制系统设计为主题,一步一步地解析。
首先,我们需要了解单相无刷电机的基本原理。
单相无刷电机是通过电子换向器来实现转子的换向,从而实现电机的运转。
电子换向器的主要功能是将直流电源的电流进行适当的调整,以产生恰当的电流矢量,并根据转子位置实时地改变电流矢量的大小和方向。
这样可以保证电流矢量始终与磁场矢量垂直,从而保证电机的正常运转。
接下来,我们需要确定电机的控制策略。
常见的控制策略有电流控制、速度控制和位置控制。
其中,电流控制是最为基础的控制策略,它通过调整电流大小和方向来控制电机的转矩输出。
速度控制是在电流控制的基础上,通过调整电流的大小来控制电机的转速。
位置控制是在速度控制的基础上,通过测量电机的转子位置来控制电机的位置输出。
根据实际需求,可以选择适合的控制策略。
然后,我们需要选择合适的电子换向器。
电子换向器是单相无刷电机控制系统的核心部件,它决定了电机的性能和稳定性。
常见的电子换向器有霍尔传感器式和无霍尔传感器式两种。
霍尔传感器式电子换向器通过感应转子上的霍尔传感器来确定转子位置,具有准确性高、转矩波动小的优点。
无霍尔传感器式电子换向器通过测量电机的反电势来确定转子位置,具有结构简单、成本低的优点。
根据实际需求,可以选择适合的电子换向器。
接下来,我们需要确定适当的控制算法。
常见的控制算法有经典的PID控制算法和先进的矢量控制算法。
PID控制算法通过调节比例、积分和微分三个参数来实现控制目标。
矢量控制算法是一种模拟感应电机的转子电流矢量,使其与转子磁场矢量保持垂直,从而实现电机控制的高级算法。
根据实际需求和控制精度要求,可以选择适当的控制算法。
单相异步电容运转电机设计程序单相异步电容运转电机(Capacitor Start Motor)是一种常见的电动机类型,它通过使用一个辅助电容器来提供额外的相位差,从而帮助电动机启动和运转。
在这篇文章中,我们将介绍单相异步电容运转电机的设计程序。
首先,我们需要确定电机的额定功率和额定电压。
根据应用需求和负载情况,选择适当的额定功率和额定电压。
通常,可以参考相关标准和规范来选择电机的额定参数。
第二步是确定电机的工作频率。
单相异步电容运转电机通常在50Hz或60Hz的工频下运转。
根据所在地区的电网标准,确定电机的工作频率。
接下来,我们需要计算所需的电容值。
电容器的选择应该考虑到负载特性、启动需求和额定功率。
通常,可以使用以下公式计算所需的电容值:C = (7 to 10) x (P / V^2)其中,C表示所需的电容值(单位为法拉),P表示额定功率(单位为瓦特),V表示额定电压(单位为伏特)。
根据计算结果,选择合适的电容器。
然后,我们需要选择适当的启动电容器和启动电阻。
启动电容器用于提供相位差,启动电阻用于限制启动电流。
根据电动机的大小和额定功率,可以参考相关的数据表和图表来选择适当的启动电容器和启动电阻。
此外,我们还需要选择合适的启动开关和保护装置。
启动开关用于控制电机的启动和停止,保护装置用于保护电机免受过载、短路和其他故障的影响。
根据电动机的规格和应用需求,选择适当的启动开关和保护装置。
最后,我们需要设计电机的整体结构和外壳。
根据电机的类型和应用需求,选择适当的材料和制造工艺,设计合适的外壳和支架。
确保电机的结构和外壳符合相关的安全标准和规范。
在电机的设计过程中,还应考虑到电机的效率、功率因数和噪音水平。
通过合适的设计和选择合适的组件,可以提高电机的效率和功率因数,并减少噪音水平。
总结来说,单相异步电容运转电机的设计程序包括确定额定功率和额定电压、确定工作频率、计算电容值、选择启动电容器和启动电阻、选择启动开关和保护装置,以及设计电机的整体结构和外壳。
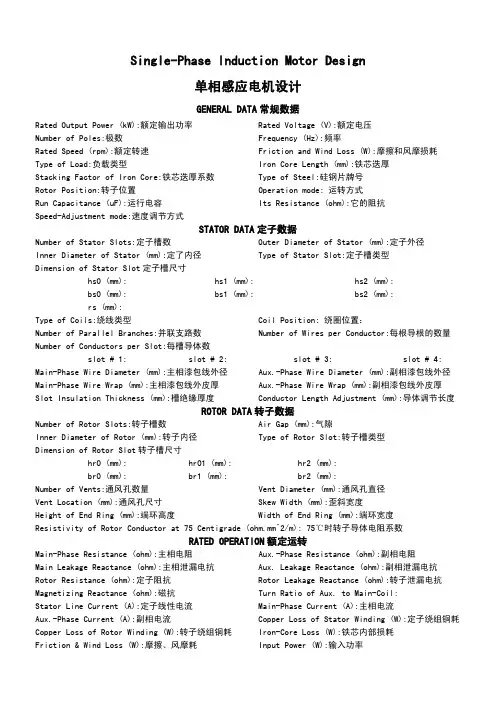
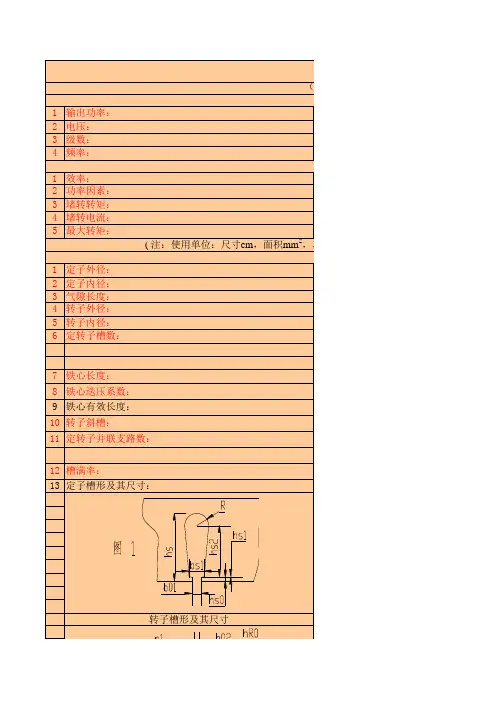
Single-Phase Induction Motor Design单相感应电机设计GENERAL DATA常规数据Rated Output Power (kW):额定输出功率 Rated Voltage (V):额定电压Number of Poles:极数 Frequency (Hz):频率Rated Speed (rpm):额定转速 Friction and Wind Loss (W):摩擦和风摩损耗 Type of Load:负载类型 Iron Core Length (mm):铁芯迭厚Stacking Factor of Iron Core:铁芯迭厚系数 Type of Steel:硅钢片牌号Rotor Position:转子位置 Operation mode: 运转方式Run Capacitance (uF):运行电容 Its Resistance (ohm):它的阻抗Speed-Adjustment mode:速度调节方式STATOR DATA定子数据Number of Stator Slots:定子槽数 Outer Diameter of Stator (mm):定子外径Inner Diameter of Stator (mm):定了内径 Type of Stator Slot:定子槽类型Dimension of Stator Slot定子槽尺寸hs0 (mm): hs1 (mm): hs2 (mm):bs0 (mm): bs1 (mm): bs2 (mm):rs (mm):Type of Coils:绕线类型 Coil Position: 绕圈位置:Number of Parallel Branches:并联支路数 Number of Wires per Conductor:每根导根的数量 Number of Conductors per Slot:每槽导体数slot # 1: slot # 2: slot # 3: slot # 4: Main-Phase Wire Diameter (mm):主相漆包线外径 Aux.-Phase Wire Diameter (mm):副相漆包线外径 Main-Phase Wire Wrap (mm):主相漆包线外皮厚 Aux.-Phase Wire Wrap (mm):副相漆包线外皮厚 Slot Insulation Thickness (mm):槽绝缘厚度 Conductor Length Adjustment (mm):导体调节长度ROTOR DATA转子数据Number of Rotor Slots:转子槽数 Air Gap (mm):气隙Inner Diameter of Rotor (mm):转子内径 Type of Rotor Slot:转子槽类型Dimension of Rotor Slot转子槽尺寸hr0 (mm): hr01 (mm): hr2 (mm):br0 (mm): br1 (mm): br2 (mm):Number of Vents:通风孔数量 Vent Diameter (mm):通风孔直径Vent Location (mm):通风孔尺寸 Skew Width (mm):歪斜宽度Height of End Ring (mm):端环高度 Width of End Ring (mm):端环宽度Resistivity of Rotor Conductor at 75 Centigrade (ohm.mm^2/m): 75℃时转子导体电阻系数RATED OPERATION额定运转Main-Phase Resistance (ohm):主相电阻 Aux.-Phase Resistance (ohm):副相电阻Main Leakage Reactance (ohm):主相泄漏电抗 Aux. Leakage Reactance (ohm):副相泄漏电抗 Rotor Resistance (ohm):定子阻抗 Rotor Leakage Reactance (ohm):转子泄漏电抗 Magnetizing Reactance (ohm):磁抗 Turn Ratio of Aux. to Main-Coil:Stator Line Current (A):定子线性电流 Main-Phase Current (A):主相电流Aux.-Phase Current (A):副相电流 Copper Loss of Stator Winding (W):定子绕组铜耗 Copper Loss of Rotor Winding (W):转子绕组铜耗 Iron-Core Loss (W):铁芯内部损耗Friction & Wind Loss (W):摩擦、风摩耗 Input Power (W):输入功率Output Power (W):输出功率 Mechanical Shaft Torque (N.m):转矩Efficiency (%):效率 Power Factor:功率因数Rated Slip:额定压降 Rated Shaft Speed (rpm):额定转速NO-LOAD OPERATION空载运转Main Leakage Reactance (ohm):主相泄漏电抗 Aux. Leakage Reactance (ohm):副相泄漏电抗 Rotor Leakage Reactance (ohm):转子泄漏电抗 Magnetizing Reactance (ohm):磁抗Stator Line Current (A):定子线性电流 Main-Phase Current (A):主相电流Aux.-Phase Current (A): 副相电流 Iron-Core Loss (W):铁芯内部损耗Input Power (W):输入功率 Power Factor:功率因数Slip:压降 Shaft Speed (rpm):转速BREAK-DOWN OPERATION最大运转Break-down Slip:最大功率时压降 Break-down Torque (N.m):最大转矩Break-down Torque Ratio:最大转矩倍数LOCKED-ROTOR OPERATION起动运转Locked-rotor Torque (N.m):起动转矩 Locked-rotor Phase Current (A):起动电流 Locked-rotor Torque Ratio:起动转矩倍数 Locked-rotor Current Ratio:起动电流倍数DETAILED DATA AT RATED OPERATION (额定运转数据)Main Slot Leakage Reactance (ohm):主相槽泄漏电抗Main End-Winding Leakage Reactance (ohm):主相端部绕组泄漏电抗Main Differential Leakage Reactance (ohm):主相电枢齿端磁漏电抗Aux. Slot Leakage Reactance (ohm):副相槽泄漏电抗Aux. End-Winding Leakage Reactance (ohm):副相端部绕组泄漏电抗Aux. Differential Leakage Reactance (ohm):副相电枢齿端磁漏电抗Rotor Slot Leakage Reactance (ohm):转子槽泄漏电抗Rotor End-Winding Leakage Reactance (ohm):转子端部绕组泄漏电抗Rotor Differential Leakage Reactance (ohm):转子电枢齿端磁漏电抗Skewing Leakage Reactance (ohm):相位差泄漏电抗Main-Phase Winding Factor:主相绕线因数 Aux.-Phase Winding Factor:副相绕线因数 Stator-Teeth Flux Density (Tesla):定子齿部磁通密度Rotor-Teeth Flux Density (Tesla):转子齿部磁通密度Stator-Yoke Flux Density (Tesla):转子轭部磁通密度Rotor-Yoke Flux Density (Tesla):定子轭部磁通密度 Air-Gap Flux Density (Tesla):气隙磁通密度 Stator-Teeth Ampere Turns (A.T):转子齿部安匝 Rotor-Teeth Ampere Turns (A.T):定子齿部安匝 Stator-Yoke Ampere Turns (A.T):转子轭部安匝 Rotor-Yoke Ampere Turns (A.T):定子轭部安匝 Air-Gap Ampere Turns (A.T):气隙安匝Correction Factor for MagneticCircuit Length of Stator Yoke:定子轭部磁路长度修正系数Correction Factor for Magnetic Circuit Length of Rotor Yoke:转子轭部磁路长度修正系数 Saturation Factor for Teeth:磁部饱和系数 Induced-Voltage Factor:感应电压系数 Saturation Factor for Teeth & Yoke:磁部&轭部饱和系数Mean Half-Turn Length of Main-Phase Winding (mm):主相绕组平均转动长度一半Mean Half-Turn Length of Aux.-Phase Winding (mm):副相绕组平均转动长度一半Main Winding Current Density (A/mm^2):主相绕组电流密度Aux. Winding Current Density (A/mm^2):副相绕组电流密度Air-Gap Unit-Length Ampere (A/mm):气隙单位长度安培Mean Stator Thermal Load (A^2/mm^3):定子平均热负荷Fill-Factor槽满率 Thermal-Load热负荷TRANSIENT FEA INPUT DATA原始输入数据For Main Winding:主相绕组 Number of Turns:匝数Parallel Branches:并联支路 Terminal Resistance (ohm):终端阻抗End Leakage Inductance (H):终端漏磁电感 For Aux. Winding:副相绕组Number of Turns:匝数 Parallel Branches:并联支路Terminal Resistance (ohm):终端阻抗 End Leakage Inductance (H):终端漏磁电感 Starting Capacitance (uF):起动电容器 Running Capacitance (uF):运行电容器 Switch Speed (rpm):转换速度。
单相无刷电机的控制系统设计一、引言单相无刷电机是一种在现代工业和家用电器中广泛应用的电机类型,它具有体积小、效率高、运行平稳等优点,在家电、医疗器械、汽车等领域有着重要的应用价值。
为了充分发挥单相无刷电机的性能优势,需要设计一个稳定、高效的控制系统来驱动这种电机。
本文将重点介绍单相无刷电机的控制系统设计,包括控制方法、硬件设计和软件编程等方面。
二、单相无刷电机的基本原理单相无刷电机是一种通过电子技术控制电机转子位置的电机。
它与传统的交流异步电机相比,可以实现更高的效率和更精准的控制。
单相无刷电机由定子和转子两部分组成,其中定子上通常布置有若干组绕组,而转子上布置有若干极对的永磁体。
在工作时,单相无刷电机需要通过控制器来确定转子位置,并采用恰当的方式控制定子绕组上的电流,从而使得电机可以按照期望的速度和方向运转。
三、单相无刷电机的控制方法1. 基于霍尔传感器的控制方法单相无刷电机通常配备有霍尔传感器,通过检测转子位置来实现控制。
这种方法简单可靠,能够准确检测转子位置,但由于霍尔传感器本身的精度问题,可能会出现控制精度不高的情况。
2. 传感器无刷电机控制方法传感器无刷电机通过算法计算转子位置,而不依赖于外部霍尔传感器。
这种方法可以提高控制精度,同时减少了传感器的使用成本,但需要更复杂的算法来实现。
四、单相无刷电机的控制系统硬件设计1. 电机驱动器电机驱动器是单相无刷电机控制系统中的关键部分,它需能够根据控制信号提供恰当的电流给电机,控制电机的转速和转矩。
常见的电机驱动器包括功率半导体器件如IGBT、MOSFET等。
2. 控制器控制器主要负责计算电机转子位置和控制电机相电流的大小和方向。
控制器可以采用微处理器或者专门的控制芯片,通过编程实现控制算法。
3. 传感器如果采用基于霍尔传感器的控制方法,需要安装霍尔传感器来检测转子位置。
如果采用传感器无刷电机控制方法,则可以省略传感器。
五、单相无刷电机的控制系统软件编程控制系统的软件编程是单相无刷电机控制系统设计中至关重要的一部分。
单相电动机的定子和转子设计优化单相电动机是一种常见的家用电器之一,广泛应用于空调、洗衣机、电扇等家电产品中。
在单相电动机的设计中,定子和转子的优化是非常重要的一环,对于电机的性能和效率具有关键性的影响。
首先,我们来看定子的设计优化。
定子是单相电动机的固定部分,其主要作用是产生磁场。
定子的设计需要考虑以下几个方面:1. 电磁线圈的布局:定子的电磁线圈通常采用具有空隙的铁芯绕组,通过通电产生磁场。
在设计时,需要合理布置线圈的结构和匝数,以确保磁场的均匀性和强度。
同时,还需要考虑线圈的散热问题,避免过高的温度影响电机的寿命。
2. 定子的铁芯材料选择:定子的铁芯是电磁场传递的重要部分,其材料的选择对电机的效率和性能具有重要影响。
常见的定子铁芯材料有硅钢片和铝合金等。
硅钢片具有低磁阻和低损耗的特点,能有效减少铜损耗和涡流损耗,提高电机的效率;而铝合金则具有轻质、机械强度高等特点,可以降低电机的重量。
3. 绝缘材料的选择:定子的电磁线圈需要使用绝缘材料进行包覆,以避免绝缘性能下降导致的故障和事故。
绝缘材料应具有良好的电绝缘性能、耐温性能和机械强度,以确保电机的安全可靠运行。
接下来,我们来关注转子的设计优化。
转子是单相电动机的旋转部分,其主要作用是产生转矩。
在转子的设计中需要考虑以下几个方面:1. 材料的选择:转子的材料选择对电机的性能和效率有着重要的影响。
常见的转子材料有铝合金、铜和磁性材料等。
铝合金具有轻质、低成本的特点,适用于中小功率的家用电器;而铜则具有良好的导电性能,适用于较高功率的电动机;磁性材料如钕铁硼等则适用于特殊要求的高性能电机。
2. 转子槽型设计:转子的槽型设计对电机的效率和扭矩特性有着重要的影响。
转子槽型的选择应根据电机的工作要求进行优化,以提高磁场的分布均匀性和转子的磁通量。
3. 平衡性的考虑:转子的平衡性对电机的振动和噪音有着重要的影响。
在设计转子时,需要考虑到转子的动态平衡和静态平衡问题,以提高电机的运行平稳性和寿命。
单相无刷电机的控制系统设计-回复单相无刷电机的控制系统设计:引言:随着现代科技的发展,电机在各个领域的应用越来越广泛。
无刷电机由于具有高效、低噪音、寿命长等优点,成为了许多应用领域的选择。
本文将重点探讨单相无刷电机的控制系统设计,包括硬件设计和软件设计两个方面。
第一部分:硬件设计1. 电机驱动器选择:单相无刷电机控制系统中最重要的部分就是电机驱动器。
常见的驱动器有电子调速器(ESC)和智能功率模块(IPM)两种。
电子调速器适用于低功率应用,而IPM适用于中高功率应用。
根据实际需求选择合适的电机驱动器。
2. 电机传感器选择:为了确保无刷电机的准确控制,通常需要添加一些传感器。
三种常见的传感器是霍尔传感器、反电动势(Back EMF)传感器和位置传感器。
霍尔传感器是最简单的一种,能够提供电机转子的位置信息。
反电动势传感器可以测量电机转子在电流过程中产生的反电动势,从而估计转子位置。
位置传感器则可以提供更加精确的转子位置信息。
根据应用需求选择合适的传感器。
3. 电机控制器设计:电机控制器是对电机进行实时控制的关键。
在单相无刷电机控制系统中,通常使用空间矢量调制(SVM)算法来实现电机控制。
SVM算法将电机控制问题转化为一个求解最优输运策略的问题。
通过控制电机的转子电流和电压,来实现对电机的控制。
通过编程算法实现电机控制器的设计。
第二部分:软件设计1. PID控制算法设计:PID控制算法是控制系统中最常用的算法之一。
在无刷电机控制系统中,通过调节电流环和速度环的PID参数,可以实现对电机的准确控制。
电流环用于控制电机的输出电流,速度环用于控制电机的转速。
通过软件编程实现PID控制算法的设计。
2. 故障保护机制设计:为了确保电机的安全运行,通常需要设计一套故障保护机制。
常见的故障保护机制包括过流保护、过压保护、欠压保护和过温保护等。
通过实时监测电机的电流、电压和温度等参数,一旦出现异常情况,及时采取保护措施,保证电机的稳定运行。
基于ANSOFT的单相电机设计与性能分析的开题报告一、选题背景电机是现代社会中应用最广泛的电动机械。
通过对电机各种参数的调整和改进,可以实现电机性能的提高和能量利用效率的提升。
与传统电机相比,单相电机具有结构简单、制造成本低、适用性广等优点,被广泛应用于家用电器、大众交通工具、医疗设备、舞台灯光等领域。
因此,对单相电机的设计与性能分析具有重要的理论和实际意义。
二、研究目的本文旨在通过ANSOFT电磁仿真软件,对单相电机进行分析与设计,探究其电磁特性和性能。
主要包括以下几个方面:1.研究单相电机的结构和工作原理,分析其电磁特性。
2.建立单相电机的电磁模型,对其电磁特性进行仿真分析。
3.通过对仿真结果的分析,对单相电机的设计参数进行优化。
4.对电机的转矩、功率、效率进行计算和分析,探究其性能。
三、研究内容1.单相电机的结构与工作原理单相电机包括主机、电容器和起动电路等部分。
主机由转子和定子组成,定子上绕有主绕组和辅助绕组。
当给定定子的主绕组通以交流电源的电流时,产生正弦波形的磁通,作用于转子上的铜棒上,使其产生感应电动势,产生偏转力矩,转子开始转动。
同时,起动电路起到了使单相电机正常启动的作用。
电容器的作用是使电机产生相位差,引起旋转磁场。
2.单相电机的电磁模型根据单相电机的工作原理,建立电磁模型。
在建模过程中应注意:(1)对电机外界的励磁电流,由于需要考虑到外界环境对于电机摆动的影响。
(2)选用合适的电机材料,结合实际情况进行仿真。
3.单相电机的优化设计在模型建立后,可通过ANSOFT进行仿真分析,并对模型参数进行优化设计。
如电机的磁路集线环、铜棒数量等,通过调整指标,得到理想的仿真结果。
4.单相电机性能分析通过计算单相电机的转矩、功率、效率等指标,进而探究电机的性能。
根据结果,改进单相电机的设计,提升其性能。
四、研究方法本论文的研究方法主要包括:(1)电机结构分析:对单相电机的结构和工作原理进行详细分析。
单相交流感应电机设计要点一、电机类型选择在设计单相交流感应电机之前,首先需要确定所需的电机类型。
常见的单相交流感应电机包括感应电动机和异步电动机。
感应电动机适用于低功率和中等功率的应用,而异步电动机适用于高功率的应用。
根据具体的应用需求,选择适合的电机类型。
二、电机参数计算在设计单相交流感应电机时,需要计算电机的各项参数,包括额定功率、额定电压、额定电流、额定转速等。
这些参数的计算需要根据具体的应用需求和设计要求进行。
三、定子设计定子是单相交流感应电机的重要组成部分,其设计需要考虑到电机的效率、功率因数和启动性能等方面。
定子绕组的设计应根据电机的额定功率和额定电压来确定绕组的匝数和截面积等参数。
四、转子设计转子是单相交流感应电机的另一个重要组成部分,其设计需要考虑到电机的转矩和运行稳定性等方面。
转子的设计应根据电机的额定转速和转矩要求来确定转子的形状和材料等参数。
五、磁路设计磁路是单相交流感应电机的核心部分,其设计需要考虑到电机的效率和磁场分布等方面。
磁路设计应根据电机的额定功率和额定电压来确定磁路的尺寸和材料等参数。
六、冷却系统设计冷却系统是单相交流感应电机的重要组成部分,其设计需要考虑到电机的散热和工作温度等方面。
冷却系统的设计应根据电机的额定功率和运行条件来确定散热面积和冷却介质等参数。
七、控制系统设计控制系统是单相交流感应电机的关键部分,其设计需要考虑到电机的启动、运行和保护等方面。
控制系统的设计应根据电机的额定功率和运行条件来确定控制方法和保护措施等参数。
八、效率和性能优化在设计单相交流感应电机时,需要考虑到电机的效率和性能优化。
通过合理的设计和优化,可以提高电机的效率和性能,减少能耗和损耗。
九、安全性和可靠性设计在设计单相交流感应电机时,需要考虑到电机的安全性和可靠性。
通过合理的设计和选材,可以提高电机的安全性和可靠性,减少故障和事故的发生。
设计单相交流感应电机需要考虑到电机类型选择、电机参数计算、定子设计、转子设计、磁路设计、冷却系统设计、控制系统设计、效率和性能优化、安全性和可靠性设计等要点。
单相无刷电机的控制系统设计-回复单相无刷电机的控制系统设计:第一步:了解单相无刷电机的工作原理和特性在开始设计单相无刷电机的控制系统之前,我们需要了解单相无刷电机的工作原理和特性。
单相无刷电机是一种能够将直流电能转化为机械能的电机,它通过电流控制和磁场调节实现转矩和转速的控制。
这种电机具有高效率、高起动转矩和低噪音等特点,在家用电器和工业领域应用广泛。
第二步:确定控制系统的目标和要求在设计之前,我们需要确定控制系统的目标和要求。
这些目标和要求可能包括电机的转速、转矩和响应时间等。
根据具体应用场景的需求,我们可以确定合适的控制策略和参数。
第三步:选择适合的控制方法基于单相无刷电机的特性和要求,我们可以选择合适的控制方法。
常见的控制方法包括直接转矩控制(DTC)、感应电机矢量控制(IMC)和无传感器转矩控制(SPTC)等。
不同的控制方法具有不同的优点和适应性,我们需要根据实际情况进行选择。
第四步:设计电流控制环电流控制是单相无刷电机控制系统中最基本的一个环节。
通过控制电机的相电流,我们可以实现转矩的控制。
通常,我们使用比例积分控制(PI控制)来实现电流环的闭环控制。
首先,我们需要设计电流反馈回路,测量和采样电机相电流。
然后,将测量值与期望电流进行比较,并计算出控制调节量。
最后,将调节量输出给功率电子器件,控制相电流的大小和方向。
第五步:设计速度控制环在确定了电流控制环之后,我们可以进一步设计速度控制环。
通过控制电机的转速,我们可以实现机械输出的稳定控制。
在设计速度控制环时,我们可以使用PI控制或者模型预测控制(MPC)等方法。
首先,我们需要测量和采样电机的转速,然后与期望转速进行比较,计算出控制调节量。
最后,将调节量输出给电机驱动器,控制电机的转速。
第六步:设计位置控制环(可选)在某些应用场景下,我们需要实现更高级的控制,如位置控制。
位置控制可以通过控制电机的位置来实现机器的精细运动控制。
在设计位置控制环时,我们可以使用PID控制或者模糊控制等方法。