蜗杆传动知识
- 格式:doc
- 大小:602.50 KB
- 文档页数:13
蜗轮蜗杆乐高知识点蜗轮蜗杆是乐高机械学习中的一个重要知识点,它是一种常见的传动机构。
蜗轮蜗杆传动具有传动比大、减速比稳定、传动效率高等特点,在各种机械设备中得到广泛应用。
本文将介绍蜗轮蜗杆的基本原理、结构特点、应用领域等相关知识点。
一、蜗轮蜗杆的基本原理蜗轮蜗杆传动是一种通过蜗杆带动蜗轮旋转的传动方式。
它由蜗轮和蜗杆两个部分组成,其中蜗轮是一个齿轮,齿数较少,一般为1至4个;蜗杆是一种螺旋线形的轴,它与蜗轮啮合,通过旋转带动蜗轮转动。
蜗轮蜗杆传动的原理是利用蜗杆的螺旋线形与蜗轮的齿轮啮合,实现转速减小、扭矩增大的效果。
蜗杆的螺旋线斜度很小,因此每转动一周,蜗轮只能转动少数齿数。
这使得蜗轮蜗杆传动具有较大的传动比,在工程中常用于减速装置。
二、蜗轮蜗杆的结构特点1. 轴向布局:蜗轮蜗杆传动的蜗杆与蜗轮呈轴向布局,占用空间小,结构紧凑。
2. 传动比稳定:蜗轮蜗杆传动的传动比只取决于蜗轮的齿数,与输入转速无关,因此传动比稳定。
3. 传动效率高:蜗轮蜗杆传动的传动效率通常较高,一般在80%以上,可以达到90%左右。
三、蜗轮蜗杆的应用领域蜗轮蜗杆传动由于其特殊的结构特点,在各个领域得到广泛应用。
1. 工业机械:蜗轮蜗杆传动常用于工业机械的减速装置,例如工厂中的输送机、搅拌机、切割机等。
2. 交通运输:蜗轮蜗杆传动常用于汽车、船舶等交通工具中的行驶装置,实现转速减小和扭矩增大。
3. 机器人:蜗轮蜗杆传动在机器人领域也有广泛应用,用于机器人的关节传动,实现机械臂的运动控制。
4. 家用电器:蜗轮蜗杆传动常用于家用电器中的马达减速装置,例如洗衣机、搅拌机等。
四、蜗轮蜗杆乐高的学习与应用乐高机械学习是一种通过乐高积木搭建各种机械结构,并通过学习乐高机械原理来实现运动的过程。
蜗轮蜗杆乐高是其中的一个重要知识点,通过搭建蜗轮蜗杆传动的乐高模型,可以更好地理解蜗轮蜗杆传动的原理和特点。
在乐高机械学习中,蜗轮蜗杆乐高模型的搭建需要注意以下几点:1. 确定传动比:根据实际需求确定蜗轮和蜗杆的齿数,以达到所需的传动比。
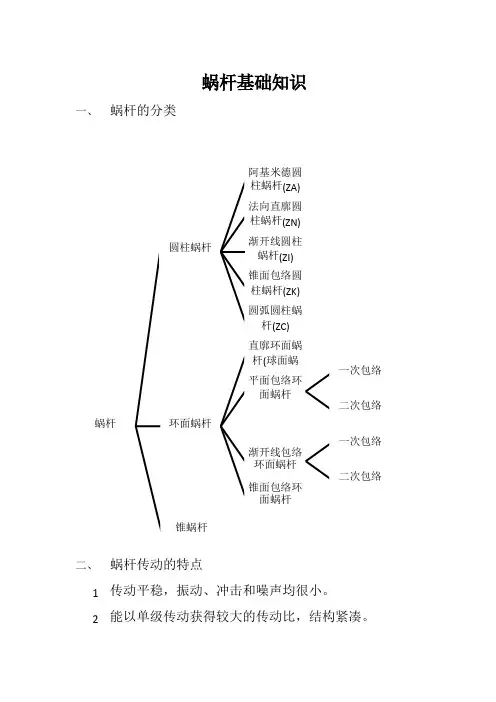
蜗杆基础知识一、蜗杆的分类圆柱蜗杆阿基米德圆柱蜗杆(ZA)法向直廓圆柱蜗杆(ZN)渐开线圆柱蜗杆(ZI)锥面包络圆柱蜗杆(ZK)圆弧圆柱蜗杆(ZC)直廓环面蜗杆(球面蜗平面包络环面蜗杆一次包络二次包络蜗杆环面蜗杆一次包络渐开线包络环面蜗杆二次包络锥面包络环面蜗杆锥蜗杆二、蜗杆传动的特点1传动平稳,振动、冲击和噪声均很小。
2能以单级传动获得较大的传动比,结构紧凑。
3蜗杆螺牙与蜗轮齿面间啮合摩擦损耗较大,因此传动效率要比齿轮传动低,且容易导致发热和出现温升过高现象。
蜗轮也较容易磨损。
4失效形式:蜗杆传动的失效形式和齿轮传动类似,也有齿面点蚀、磨损、胶合,以及轮齿的弯曲折断。
其中尤以点蚀和磨损最易发生,胶合现象也常出现。
这是由于蜗杆传动啮合效率低,滑动速度较大,而当润滑不良时容易发热等原因引起,蜗轮轮齿的弯曲折断也偶有所见,这往往是由于齿面磨损过大齿厚减薄过多或是安装不良造成严重偏载所致。
5由于蜗杆传动啮合摩擦较大,且由于蜗轮滚刀的形状尺寸不可能做得和蜗杆绝对相同,被加工出的蜗轮齿形难以和蜗杆齿精确共轭,必需依靠运转跑合才渐趋理想;因此蜗轮副的组合必需具有良好的减磨和跑合性能以及抗胶合性能。
所以蜗轮通常采用青铜或铸铁做齿圈,并尽可能与淬硬并经磨削的钢制蜗杆相配。
也正因如此,蜗轮轮齿的强度和硬度远不如蜗杆,且蜗杆螺牙成螺旋状,强度较大,因此蜗轮轮齿是两者中的薄弱环节。
如果在设计中能合理地选择齿形和传动参数,采用良好的润滑方式和散热措施,选用抗磨和抗胶合地润滑油,选配适当的材料组合以及提高加工和安装精度,则上述地失效情况可以得到改善和避免。
三、普通圆柱蜗杆普通圆柱蜗杆的齿形多用成形线为直线的刀具加工而成。
由于刀具安装的方位不同,生成的螺旋面在不同截面中的齿廓曲线形状也不同。
按蜗杆齿廓曲线的形状,普通圆柱蜗杆可以分为以下几种:1.ZA――阿基米德圆柱蜗杆蜗杆齿面为阿基米德螺旋面,端面齿廓为阿基米德螺旋线,轴向齿廓为直线,法向齿廓为凸廓曲线。

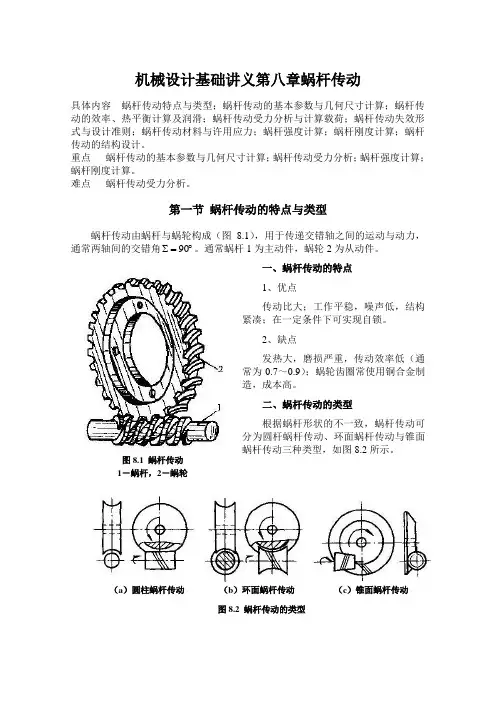
(a )圆柱蜗杆传动 (b )环面蜗杆传动 (c )锥面蜗杆传动图8.2 蜗杆传动的类型机械设计基础讲义第八章蜗杆传动具体内容 蜗杆传动特点与类型;蜗杆传动的基本参数与几何尺寸计算;蜗杆传动的效率、热平衡计算及润滑;蜗杆传动受力分析与计算载荷;蜗杆传动失效形式与设计准则;蜗杆传动材料与许用应力;蜗杆强度计算;蜗杆刚度计算;蜗杆传动的结构设计。
重点 蜗杆传动的基本参数与几何尺寸计算;蜗杆传动受力分析;蜗杆强度计算;蜗杆刚度计算。
难点 蜗杆传动受力分析。
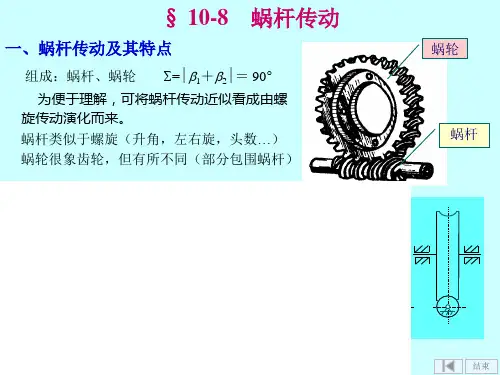
第一节 蜗杆传动的特点与类型蜗杆传动由蜗杆与蜗轮构成(图8.1),用于传递交错轴之间的运动与动力,通常两轴间的交错角︒=∑90。
通常蜗杆1为主动件,蜗轮2为从动件。
一、蜗杆传动的特点1、优点传动比大;工作平稳,噪声低,结构紧凑;在一定条件下可实现自锁。
2、缺点发热大,磨损严重,传动效率低(通常为0.7~0.9);蜗轮齿圈常使用铜合金制造,成本高。
二、蜗杆传动的类型根据蜗杆形状的不一致,蜗杆传动可分为圆杆蜗杆传动、环面蜗杆传动与锥面蜗杆传动三种类型,如图8.2所示。
图8.1 蜗杆传动 1-蜗杆,2-蜗轮根据加工方法不一致,圆柱蜗杆传动又分为阿基米德蜗杆传动(ZA型)、法向直廓蜗杆传动(ZN型)、渐开线蜗杆传动(ZI型)与圆弧圆柱蜗杆传动(ZC型)等。
前三种称之普通圆柱蜗杆传动,见图8.3所示。
(a)阿基米德蜗杆(b)法向直廓蜗杆(c)渐开线蜗杆图8.3 普通蜗杆的类型第二节圆柱蜗杆传动的基本参数与几何尺寸计算在普通圆柱蜗杆传动中,阿基米德蜗杆传动制造简单,在机械传动中应用广泛,而且也是认识其他类型蜗杆传动的基础,故本节将以阿基米德蜗杆传动为例,介绍蜗杆传动的一些基本知识与设计计算问题。
一、蜗杆传动的基本参数通过蜗杆轴线并垂直于蜗杆轴线的平面称之中间平面,见图6.4。
在中间平面内,蜗杆与蜗轮的啮合相当于齿条与齿轮的啮合。
因此,设计圆柱蜗杆传动时,均取中间平面上的参数与几何尺寸作为基准。
蜗轮蜗杆模数表一、蜗轮蜗杆传动的基本知识1.1 传动原理蜗轮蜗杆传动是一种常见的传动机构,由一个蜗轮和一个蜗杆组成。
蜗轮是呈蜗牛壳形的圆盘,在其周边有螺旋状的齿轮,称为蜗牙;蜗杆是一种纽带状的齿轮。
传动时,当蜗杆旋转时,蜗牙将蜗杆转动,实现传动功能。
1.2 优点和应用领域蜗轮蜗杆传动具有传动比大、传动精度高、输运平稳、结构简单等优点,因此在很多领域有着广泛的应用,如机械加工、食品包装、仓储物流等。
二、蜗轮蜗杆模数表的作用蜗轮蜗杆模数表是蜗轮蜗杆传动设计中的重要工具,它将蜗轮蜗杆传动的主要参数整理成表格形式,方便工程师在设计中参考使用。
模数表中包含了蜗轮蜗杆的模数、齿数、蜗杆减速比等信息。
2.1 模数的定义模数是蜗轮蜗杆传动中的一个重要参数,它表示蜗轮齿轮齿数与直径的比值。
模数越大,蜗轮齿轮越大,传动比越小,传动效果越大。
模数表中列出了常见的模数值,方便设计者根据实际需求选择合适的模数。
2.2 齿数的选择蜗轮蜗杆传动中,齿数的选择直接影响到传动的效果。
齿数的选取要满足传动比要求,同时还要考虑到蜗轮蜗杆的结构尺寸、齿轮数和传动精度等因素。
模数表中一般会给出不同齿数对应的传动比和减速比,设计者可以根据需求选择合适的齿数。
2.3 蜗杆减速比的计算蜗轮蜗杆传动的减速比是指蜗轮每转一圈,蜗杆转动的圈数。
减速比可以通过蜗轮齿数与蜗杆齿数的比值来计算。
模数表中一般会给出不同蜗杆减速比对应的齿轮数,方便设计者根据需要进行计算和选择。
三、蜗轮蜗杆模数表的使用方法3.1 确定传动需求在使用蜗轮蜗杆模数表之前,首先需要确定传动的需求,包括传动比、最大扭矩、转速、传动效率等。
这些参数将直接影响到蜗轮蜗杆传动的设计和选择。
3.2 查找模数表根据确定的传动需求,通过查找蜗轮蜗杆模数表,找到合适的模数和齿数范围。
模数表中通常按照模数从小到大的顺序列出了齿数和传动比等信息,设计者可以根据自己的需求快速找到合适的参数。
3.3 进行计算和选择根据找到的模数和齿数范围,设计者可以通过计算和比较不同参数的传动效果,选择最合适的蜗轮蜗杆传动方案。
板书设计或授课提纲课堂教学安排整顿纪律,清点人数。
人员安全教育及预防突发情况的准备在上一节课我们了解了齿轮传动的相关知识内容,那这节课让我们一起学习一下关于蜗轮蜗杆传动的知识吧。
一、蜗轮蜗杆传动的基本知识1.定义蜗轮蜗杆传动是用来传递空间互相垂直而不相交的两轴间的运动或动力的传动机构(1)只有一个或几个螺旋齿的斜齿轮就是蜗杆(2)蜗杆的类型很多,如阿基米德蜗杆、法向直廓蜗杆、渐开线蜗杆、锥面包络圆柱蜗杆和圆弧圆柱蜗杆(3)阿基米德蜗杆的轴向齿廓是直线,法向齿廓为渐开线老师:既然我们了解了什么是蜗杆嘛,什么是涡轮了,请大家阅读书本思考并回答问题。
二、蜗轮(1)与蜗杆组成交错轴齿轮副且轮齿沿着齿宽方向呈内凹弧形的斜齿轮称为蜗轮(2)蜗轮一般在滚齿机上用与蜗杆形状和参数相同的滚刀或飞刀加工而成三、蜗轮蜗杆传动的特点1.特点(1)结构紧凑,工作平稳(2)无噪声、冲击和振动小(3)能得到很大的单级传动比(4)可实现自锁2.应用(1)两轴交错、传动比较大、传递功率不太大或间歇工作的场合老师:关于蜗轮蜗杆传动适用于传动比较大,功率不太大的场所,还适用于哪些场所呢?请小组讨论并回答问题。
(2)卷扬机等起重机械中,起安全保护作用(3)机床、汽车、仪器、冶金机械(4)蜗轮一般需用贵重的减摩材料(如青铜)(5)不适用于大功率、长时间工作的场合一、蜗轮蜗杆传动的主要参数1.模数m、压力角(1)蜗杆的轴向模数m1和蜗轮的端面模数m2相等,且为标准值mx1=mt2=m(2)蜗杆的轴向压力角αx和蜗轮的端面压力角α t2相等,且为标准值aX1=at2=α.=20°2.蜗杆导程角y蜗杆导程角y:蜗杆分度圆柱螺旋线的切线与端平面之间所夹的锐角老师:请大家观看图片,小组讨论思考蜗杆分度圆直径和什么有关?3.蜗杆分度圆直径d蜗杆分度圆直径d不仅与模数m有关,而且还与头数z和导程角v有关4.蜗杆直径系数qq=d/m5.蜗杆头数和蜗轮齿数蜗杆头数z1=1、2、4、6蜗轮齿数z=29~806.蜗轮蜗杆传动的传动比i7.蜗杆有左旋和右旋,蜗轮也有左旋和右旋。
蜗轮蜗杆标准中心距蜗轮蜗杆传动是一种常见的传动形式,其特点是传动比大、传动平稳、噪音小,因此在工业生产中得到了广泛应用。
而蜗轮蜗杆的标准中心距是影响传动效果的重要参数之一,下面我们就来详细了解一下蜗轮蜗杆标准中心距的相关知识。
蜗轮蜗杆的标准中心距是指在设计和制造蜗轮蜗杆传动时所规定的蜗轮轴和蜗杆轴的中心距离。
标准中心距的选择对于蜗轮蜗杆传动的工作效率、传动比、传动精度等方面都有着重要的影响。
因此,在进行蜗轮蜗杆传动设计时,必须根据具体的传动要求和工作条件来选择合适的标准中心距。
首先,标准中心距的选择需要考虑传动比和效率。
一般来说,传动比越大,蜗轮蜗杆的标准中心距就越大。
在选择标准中心距时,需要根据传动比的要求来确定蜗轮蜗杆的参数,以保证传动效率和传动比的稳定性。
其次,标准中心距的选择还需要考虑传动的工作精度。
蜗轮蜗杆传动在工作时需要保证传动的精度和稳定性,而标准中心距的选择直接影响着传动的工作精度。
因此,在选择标准中心距时,需要考虑传动的工作精度要求,以保证传动的稳定性和可靠性。
另外,标准中心距的选择还需要考虑传动的工作条件和空间限制。
在实际的工程设计中,蜗轮蜗杆传动往往需要考虑到工作环境的限制和空间的限制,因此在选择标准中心距时,需要充分考虑传动的工作条件和空间限制,以确保传动装置能够正常工作。
总的来说,蜗轮蜗杆的标准中心距是影响传动效果的重要参数,其选择需要综合考虑传动比、传动效率、工作精度、工作条件和空间限制等因素。
只有在综合考虑了这些因素之后,才能够选择合适的标准中心距,从而保证蜗轮蜗杆传动的稳定性和可靠性。
通过对蜗轮蜗杆标准中心距的深入了解,我们能够更好地进行蜗轮蜗杆传动的设计和选择,从而提高传动装置的工作效率和传动精度,满足不同工程项目的传动需求。
希望本文能够对大家有所帮助,谢谢阅读!。
蜗杆速比所有计算公式蜗杆速比是指蜗杆传动的速度比,它是蜗杆的周速与蜗轮的周速之比。
在机械传动中,蜗杆传动是一种常见的传动方式,具有结构简单、传动平稳、噪音小等优点,因此在工业生产中得到广泛应用。
在实际应用中,需要根据具体的传动要求来计算蜗杆速比,以确保传动系统的正常运行。
下面将介绍蜗杆速比的计算公式及相关知识。
1. 蜗杆速比的定义。
蜗杆速比(i)是指蜗杆的周速与蜗轮的周速之比,通常用i表示。
蜗杆传动的速比决定了输出轴的转速与输入轴的转速之间的关系,是蜗杆传动设计中的重要参数。
2. 蜗杆速比的计算公式。
蜗杆速比的计算公式可以根据蜗杆传动的结构特点和运动规律来推导,一般有以下几种情况:(1)普通蜗杆传动的速比计算公式。
对于普通蜗杆传动,其速比可以通过以下公式来计算:i = n1 / n2。
其中,i为蜗杆速比,n1为蜗杆的转速,n2为蜗轮的转速。
(2)带有多级传动的蜗杆速比计算公式。
如果蜗杆传动采用多级传动结构,其速比可以通过以下公式来计算:i = (n1 n2 ... nk) / (m1 m2 ... mk)。
其中,i为蜗杆速比,n1、n2、...、nk为各级蜗杆的转速,m1、m2、...、mk为各级蜗轮的转速。
(3)蜗杆速比的理论计算公式。
根据蜗杆传动的原理和运动规律,可以得到蜗杆速比的理论计算公式:i = (z2 π d1) / (z1 π d2)。
其中,i为蜗杆速比,z1为蜗杆的齿数,z2为蜗轮的齿数,d1为蜗杆的分度圆直径,d2为蜗轮的分度圆直径。
3. 蜗杆速比的影响因素。
蜗杆速比的大小直接影响着蜗杆传动的输出转速和扭矩,因此在实际应用中需要考虑以下几个因素:(1)蜗杆的螺旋角度。
蜗杆的螺旋角度决定了蜗杆传动的传动比,通常情况下螺旋角度越大,蜗杆速比越大。
(2)蜗杆与蜗轮的齿数。
蜗杆与蜗轮的齿数决定了蜗杆传动的速比,一般情况下蜗轮的齿数越大,蜗杆速比越大。
(3)蜗杆传动的效率。
蜗杆传动的效率会影响其输出转速和扭矩,需要在计算蜗杆速比时考虑传动效率的影响。
蜗杆传动知识§10—1 蜗杆传动的类型及特点用于实现空间交错轴间的运动传递,一般交错角︒=∑90(如图10-1)。
其特点是结构紧凑、传动比大、传动平稳、易自锁。
缺点是摩擦磨损大、发热量大,η低,∴适于中心功率的传动。
一、蜗杆传动的类型按蜗杆形式:圆柱蜗杆(常用),图10-1 环面蜗杆图10-2锥蜗杆(较少)图10-3 1、圆柱蜗杆传动:普通圆柱蜗杆(在车床上用直线刀刀刃车削而得到)阿基米德蜗杆(ZA )——最常用,垂直于轴线平面的齿廓为阿基米德螺线,在过轴线的平面内齿廓为直线,在车床上切制时切削刃顶面通过轴线。
︒=4020α,加工简单,磨削有误差,精度较低,刀子轴线垂直于蜗杆轴线,(图10-4)单刀:导程用︒≤3γ;双刀:导程用︒3 γ法向直廓蜗杆(ZN )——切削时刀刃垂直于轮齿法面,法面齿廓(延伸渐开线~)——直线,轴面齿形为渐开线,端面齿形为一延伸渐开线,磨削有误差、精度较低。
(图10-5)渐开线蜗杆(ZI )——刀刃平面与蜗杆基圆柱相切,端面齿莆为渐开线,由渐开线齿轮演化而来(Z 小,β大),在切于基圆的平面内一侧齿形为直线,可滚齿,并进行磨削,精度、η高。
适于较高速度和较大的功率。
(图10-6)锥面包络圆柱蜗杆(ZK )——不能在车床上加工,而只能在特种铣床上用梯形齿圆盘刀具加工,加工时,工件作螺旋运动,刀具绕轴线作回转运动,铣刀或砂轮轴线与蜗杆轴线成Y 角,刀具绕自身轴线作回转运动,刀刃回转曲面的包络面即为蜗杆的螺旋齿面(图10-7),在各剖面内齿形均为曲线,可磨削,精度好,生产率高。
蜗轮用齿形尺寸与之啮合的蜗杆相同的滚切滚切,滚切外径略大,滚切时的中心距与啮合时中心距相同。
圆弧圆柱蜗杆(ZC )(Niemamm 蜗杆)(德国人)(图10-8)——与普通圆柱蜗杆比,齿廓形状不同,蜗杆的螺旋齿面是用刃边与凸圆弧形刀具切制,所在在中间平面内,蜗杆齿廓是凹圆弧形,而配对蜗轮的齿廓为凸弧形。
第8讲蜗杆传动学习目标及考纲要求1.了解蜗杆传动的组成与应用特点。
2.掌握蜗杆传动的传动比与几何尺寸计算。
3.掌握蜗杆传动的旋转方向与受力方向的判定方法,熟悉其正确啮合条件。
知识梳理一、蜗杆传动的组成及类型1.蜗杆传动是由蜗杆、蜗轮、机架等构件组成,是利用蜗杆副传递运动和动力的一种机械传动装置.2.蜗杆与蜗轮的轴线在空间互相垂直交错成90°。
3.在蜗杆传动中,蜗杆通常为主动件。
4.蜗杆传动的类型蜗杆的类型很多,根据外形不同,有圆柱蜗杆、环面蜗杆、锥蜗杆等。
根据齿形不同,普通圆柱蜗杆有阿基米德蜗杆、渐开线蜗杆、法向直廓蜗杆等。
其中阿基米德蜗杆应有最广泛。
(见表1—8—1)主平面内,蜗杆传动相当于齿条传动。
主平面内,蜗杆齿形是直线,相当于齿条;蜗轮齿形是渐开线,相当于齿轮.二、蜗杆传动的特点(见表1-8—2)四、蜗杆传动的基本参数(见表1—8—4)表1-8—4五、蜗杆传动的几何尺寸计算(见表1-8-5)mq2mzh d 211+=(2*)a a d m q hh d 222+=2(2*)a d m z h h d 211-=(2*2*)a d m qh c f h d d 222-=2(2*2a dm z h c=2cos mzcosp m απcos cos p m απcos mf a h h +=(2**)a h m h cf a h h +=(2**)a h m h c*a mh *a mh (**)a m h c(**)a m h c*c m*c m2)2m z +齿顶高系数1,顶隙系数*0.2c六、蜗杆传动的正确啮合条件蜗杆传动在中间平面内的正确啮合条件如下:1。
蜗杆的轴向模数等于蜗轮的端面模数,即12x t m m m 。
2。
蜗杆的轴向齿形角等于蜗轮的端面齿形角,即1220x t 20°.3. 蜗杆的导程角等于蜗轮的螺旋角,且旋向相同,即。
γ1=β七、齿轮传动的受力分析(见表1—8—6)表1—8—6八、蜗杆传动的失效1. 蜗杆传动的失效总发生在蜗轮上。
第七章 蜗杆传动 第一节 蜗杆传动的类型和特点蜗杆传动由蜗杆、蜗轮和机架组成,用来传递空间两交错轴的运动和动力。
如图7-1所示。
通常两轴交错角为90°,蜗杆为主动件。
一、蜗杆传动的类型如图7-2所示,根据蜗杆的形状,蜗杆传动可分为圆柱蜗杆传动(图a ),环面蜗杆传动(图b ),和锥面蜗杆传动(图c )。
圆柱蜗杆传动,按蜗杆轴面齿型又可分为普通蜗杆传动和圆弧齿圆柱蜗杆传动。
普通蜗杆传动多用直母线刀刃的车刀在车床上切制,可分为阿基米德蜗杆(ZA 型)、渐开蜗杆(ZI 型)和法面直齿廓蜗杆(ZH 型)等几种。
如图7-3所示,车制阿基米德蜗杆时刀刃顶平面通过蜗杆轴线。
该蜗杆轴向齿廓为直线,端面齿廓为阿基米德螺旋线。
阿基米德蜗杆易车削难磨削,通常在无需磨削加工情况下被采用,广泛用于转速较低的场合。
图7-1蜗杆传动如图7-4所示,车制渐开线蜗杆时,刀刃顶平面与基圆柱相切,两把刀具分别切出左、右侧螺旋面。
该蜗杆轴向齿廓为外凸曲线,端面齿廓为渐开线。
渐开线蜗杆可在专用机床上磨削,制造精度较高,可用于转速较高功率较大的传动。
蜗杆传动类型很多,本章仅讨论目前应用最为广泛的阿基米德蜗杆传动。
二、蜗杆传动的特点(1)传动比大,结构紧凑。
单级传动比一般为10~40(<80),只传动运动时(如分度机构),传动比可达1000。
(2)传动平稳,噪声小。
由于蜗杆上的齿是连续的螺旋齿,蜗轮轮齿和蜗杆是逐渐进入啮合又逐渐退出啮合的,故传动平稳,噪声小。
(3)有自锁性。
当蜗杆导程角小于当量摩擦角时,蜗轮不能带动蜗杆转动,呈自锁a) b) c) 图7-2蜗杆传动的类型状态。
手动葫芦和浇铸机械常采用蜗杆传动满足自锁要求。
(4)传动效率低。
蜗杆蜗轮啮合处有较大的相对滑动,摩擦剧烈、发热量大,故效率低。
一般η=0.7~0.9,具有自锁性能的蜗杆效率仅0.4。
(5)蜗轮造价较高。
为了减摩和耐磨,蜗轮常用青铜制造,材料成本较高。
由上述特点可知:蜗杆传动适用于传动比大,传递功率不大,两轴空间交错的场合。
图7-3 阿基米德蜗杆图7-4渐开线蜗杆第二节蜗杆传动的基本参数和几何尺寸计算图7-5所示阿基米德蜗杆传动,通过蜗杆轴线并垂直于蜗轮轴线的平面称为主平面(中间平面)。
在主平面上蜗轮与蜗杆的啮合相当于渐开线齿轮与齿条的啮合。
为了加工方便,规定主平面的几何参数为标准值。
一、蜗杆传动的基本参数1.蜗杆头数z1、蜗轮齿数z2和传动比i蜗杆头数z1,即为蜗杆螺旋线的数目。
蜗杆的头数一般取z1=1~6。
当传动比大于40图7-5 阿基米德蜗杆传动的几何尺寸或要求自锁时取z 1=1;当传动功率较大时,为提高传动效率取较大值,但蜗杆头数过多,加工精度难于保证。
蜗轮的齿数一般取z 2=27~80。
z 2过少将产生根切;z 2过大,蜗轮直径增大,与之相应的蜗杆长度增加,刚度减小。
蜗杆传动的传动比i 等于蜗杆与蜗轮转速之比。
当蜗杆回转一周时,蜗轮被蜗杆推动转过z 1个齿(或z 1/z 2周),因此传动比为:1221z z n n i ==(7-1)式中:n 1、n 2分别为蜗杆和蜗轮的转速(r/min )。
在蜗杆传动设计中,传动比的公称值按下列数值选取:5、7.5、10、12.5、15、20、25、30、40、50、60、70、80。
其中10、20、40、80为基本传动比应优先选用。
z 1、z 2可根据传动比i 按表7-1选取。
表7-1 和的推荐值由于蜗杆传动在主平面内相当于渐开线齿轮与齿条的啮合,而主平面是蜗杆的轴向平面又是蜗轮的端面(见图7-5),与齿轮传动相同,为保证轮齿的正确啮合,蜗杆的轴向模数m a 1应等于蜗轮的端面模数m t 2;蜗杆的轴向压力角1a α应等于蜗轮的端面压力角2t α;蜗杆分度圆导程角γ应等于蜗轮分度圆螺旋角β,且两者螺旋方向相同。
即:βγααα=====2121t a t a mm m3.蜗杆的分度圆直径d 1和导程角β如图7-6所示,将蜗杆分度圆柱展开,其螺旋线与端平面的夹角γ称为蜗杆的导程角。
可得:11111γd mz d p z tg a =π=(7-2) 式中:p a 1为蜗杆轴向齿距(mm);d 1为蜗杆分度圆直径(mm )。
蜗杆的螺旋线与螺纹相似也分左旋和右旋,一般多为右旋。
对动力传动为提高效率应采用较大的γ值,即采用多头蜗杆;对要求具有自锁性能的传动,应采用γ<033''︒的蜗杆传动,此时蜗杆的头数为1。
由式7-2得:mq tg z md =γ=11 (7-3) 式中:γ=tg z q 1称为蜗杆的直径系数,当m 一定时,q 值增大,则蜗杆直径d 1增大,蜗杆的刚度提高。
小模数蜗杆一般有较大的q 值,以使蜗杆有足够的刚度。
蜗杆与蜗轮正确啮合,加工蜗轮的滚刀直径和齿形参数必须与相应的蜗杆相同,为限制蜗轮滚刀的数量,d1亦标准化。
d1与m有一定的匹配如表7-2所示。
图7-6 分度圆柱展开图表7-2蜗杆基本参数(Σ= 90º)(摘自GB/T10085-88)4.中心距a蜗杆传动中,当蜗杆节圆与蜗轮分度圆重合时称为标准传动,其中心距为: )(21a 21d d +=(7-4) 规定标准中心距为40、50、63、80、100、125、160、(180)、200、(225)、250、(280)、315、(355)、400、(450)、500。
在蜗杆传动设计时中心距应按上述标准圆整。
二、蜗杆传动的几何尺寸计算标准阿基米德蜗杆传动主要几何尺寸计算公式如表7-3所示。
表7-3 阿基米德蜗杆传动的几何尺寸计算第三节 蜗杆传动的失效形式、设计准则、材料和结构一、蜗杆传动的失效形式和设计准则 1.齿面相对滑动速度v s蜗杆传动中蜗杆的螺旋面和蜗轮齿面之间有较大的相对滑动。
滑动速度v s 沿蜗杆螺旋线的切线方向。
如图7-7所示,v 1为蜗杆的圆周速度,v 2为蜗轮的圆周速度,作速度三角形得:γcos 12221v v v v s =+= (7-5) 较大的滑动速度v s ,对齿面的润滑情况、齿面的失效形式及传动效率都有很大的影响,其概略值如图7-8所示。
2.轮齿的失效形式和设计准则蜗杆传动的失效形式与齿轮传动相似,有轮齿折断、齿面点蚀、齿面磨损和胶合等,但由于蜗杆、蜗轮的齿廓间相对滑动速度较大、发热量大而效率低,因此传动的主要失效形式为胶合、磨损和点蚀。
由于蜗杆的齿是连续的螺旋线,且蜗杆的强度高于蜗轮,因而失效多发生在蜗轮轮齿上。
在闭式传动中,蜗轮的主要失效形式是胶合与点蚀;在开式传动中,主要失效形式是磨损。
综上所述,蜗杆传动的设计准则为:闭式蜗杆传动按齿面接触疲劳强度设计,并校核齿根弯曲疲劳强度,为避免发生胶合失效还必须作热平衡计算;对开式蜗杆传动通常只需按齿根弯曲疲劳强度设计。
实践证明,闭式蜗杆传动,当载荷平稳无冲击时,蜗轮轮齿因弯曲强度不足而失效的情况多发生于齿数z 2 >80~100时,所以在齿数少于以上数值时,弯曲强度校核可不考虑。
二、蜗杆、蜗轮的材料和结构 1.蜗杆、蜗轮的材料选择根据蜗杆传动的主要失效形式可知,蜗杆和蜗轮材料不仅要求有足够的强度,更重要的是要具有良好的减摩性、耐磨性和抗胶合能力。
蜗杆一般用碳钢或合金钢制造。
对高速重载传动常用15Cr 、20Cr 、20CrMnTi 等,经渗碳淬火,表面硬度56~62HRC,须经磨削。
对中速中载传动,蜗杆材料可用45、40Cr 、35SiMn 等,表面淬火,表面硬度45~55HRC ,须要磨削。
对速度不高,载荷不大的蜗杆,材料可用45钢调质或正火处理,调质硬度220~270HBS 。
蜗轮材料可参考相对滑动速度v s 来选择。
铸造锡青铜抗胶合性、耐磨性好,易加工,允许的滑动速度v s 高,但强度较低,价格较贵。
一般ZCuSn10P1允许滑动速度可25m/s, ZCuSn5Pb5Zn5常用于v s <12m/s 的场合。
铸造铝青铜,如ZCuAl10Fe3,其减磨性和抗胶合性比锡青铜差,但强度高,价格便宜,一般用于v s ≤4m/s 的传动。
灰铸铁(HT150、HT200),用于v s ≤2m/s 的低速轻载传动中。
2.蜗杆、蜗轮的结构蜗杆常和轴做成一体,称为蜗杆轴,如图7-9所示(只有d f /d ≥1.7时才采用蜗杆齿圈套装在轴上的型式)。
车制蜗杆需有退刀槽,d=d f – (2~4)mm ,故刚性较差(图a );图7-7 蜗杆传动滑动速度图7-8 滑动速度v s 的概略值a )b )图7-9 蜗杆轴结构铣削蜗杆无退刀槽时d可大于d f (图b),刚性较好。
蜗轮结构分为整体式和组合式两种,如图7-10所示。
图a)所示的整体式蜗轮用于铸铁蜗轮及直径小于100mm的青铜蜗轮。
图b)、c)、d)均为组合式结构,其中图b)为齿圈式蜗轮,轮芯用铸铁或铸钢制造,齿圈用青铜材料,两者采用过盈配合(H7/s6或H7/r6),并沿配合面安装4~6个紧定螺钉,该结构用于中等尺寸而且工作温度变化较小的场合。
图c)为螺栓式蜗轮,齿圈和轮芯用普通螺栓或铰制孔螺栓连接,常用于尺寸较大的蜗轮。
图d)为镶铸式蜗轮,将青铜轮缘铸在铸铁轮芯上然后切齿,适用于中等尺寸批量生产的蜗轮。
a) b) c) d)图7-10 蜗轮结构第四节蜗杆传动的强度计算一、蜗杆传动的受力分析蜗杆传动受力分析与斜齿圆柱齿轮的受力分析相似,齿面上的法向力F n可分解为三个相互垂直的分力:圆周力F t 、轴向力F a、径向力F r,如图7-11所示。
蜗杆为主动件,轴向力F a1的方向由左、右手定则确定。
图7-11为右旋蜗杆,用右手四指指向蜗图7-11 蜗杆传动受力分析杆转向,拇指所指方向就是轴向力F a1的方向。
圆周力F t 1与主动蜗杆转向相反;径向力F r 1指向蜗杆中心。
蜗轮受力方向,由F t 1与F a2、F a1与F t 2、F r 1与F r 2的作用力与反作用力关系确定(图7-11)。
各力的大小可按下式计算:112a 12d TF F t == N (7-6)2221a 2d TF F t == N (7-7)αtan 221t r r F F F == N (7-8)ηi T T 12= Nmm (7-9)式中:T 1、T 2分别为作用在蜗杆和蜗轮上的转矩,η为蜗杆传动的总效率。
二、蜗轮齿面接触疲劳强度计算蜗轮齿面接触疲劳强度计算与斜齿轮相似,以赫兹公式为计算基础,按节点处的啮合条件计算齿面接触应力,可推出对钢制蜗杆与青铜蜗轮或铸铁蜗轮校核公式如下:221222212520520z d m kT d d kT H ==σ ≤ []H σ (7-10) 设计公式为: 12d m ≥[]222520⎪⎭⎫ ⎝⎛H z kT σ (7-11)式中:T 2为蜗轮轴的转矩,Nmm ;K 为载荷系数K =1~1.5,当载荷平稳相对滑动速度较小时(v S < 3m/s )取较小值,反之取较大值,严重冲击时取K =1.5;[σH ]— 蜗轮材料的许用接触应力,MPa 。