转速和定子电阻的辨识
- 格式:doc
- 大小:180.00 KB
- 文档页数:4
时域法(暂态分析 transient ),频域法(稳态分析 steady-state ) 西门子参数辨识方法: 由西门子参数辨识的电流、电压波形大致可知,其采用的是基于时域(暂态)的辨识方法,即在定子测任意两相之间施加阶跃电压信号或阶跃电流信号,结合电机在不同激励信号作用下的等效电路模型,通过稳态响应和暂态响应辨识参数。
西门子通过以下四个步骤辨识出电机参数:Step1:s R (定子电阻)辨识在电机AB 相之间施加阶跃电压信号,由电流稳态响应计算s R 。
西门子采用两次发波相减的方法消除死区、开关管压降等影响。
计算公式如下:12122()s U U R I I -=-式中,12,U U ——AB 相之间的电压值;12,I I ——阶跃电压信号对应的稳态定子电流。
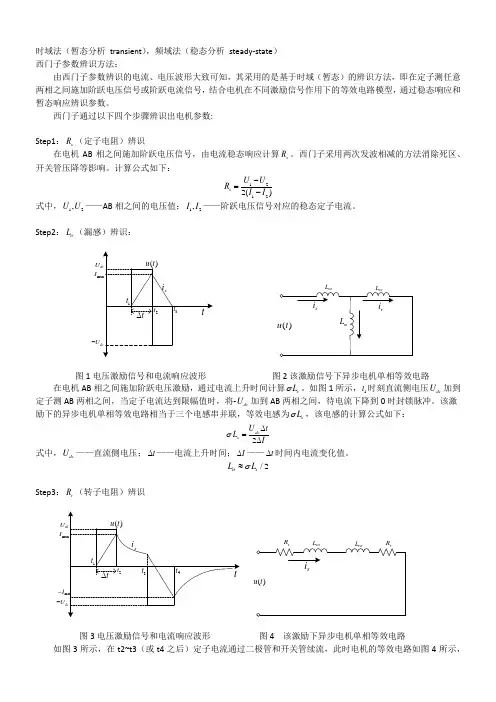
Step2:L σ(漏感)辨识:U U -IL 图1电压激励信号和电流响应波形 图2该激励信号下异步电机单相等效电路在电机AB 相之间施加阶跃电压激励,通过电流上升时间计算s L σ。
如图1所示,1t 时刻直流侧电压dc U 加到定子测AB 两相之间,当定子电流达到限幅值时,将-dc U 加到AB 两相之间,待电流下降到0时封锁脉冲。
该激励下的异步电机单相等效电路相当于三个电感串并联,等效电感为s L σ,该电感的计算公式如下:2dc s U tL Iσ∆=∆ 式中,dc U ——直流侧电压;t ∆——电流上升时间;I ∆——t ∆时间内电流变化值。
/2s L L σσ≈Step3:r R (转子电阻)辨识U U -I I - L R 图3电压激励信号和电流响应波形 图4 该激励下异步电机单相等效电路如图3所示,在t2~t3(或t4之后)定子电流通过二极管和开关管续流,此时电机的等效电路如图4所示,电流的衰减时间常数为:s r ss r s rL L L T R R R R σσσσ+=≈++ 式中,s R 和s L σ已分别在Step1和Step2中辨识出来,进而可得到转子电阻r R 。

电机转速计算公式
电机转速计算公式是指根据电机的基本参数,利用物理定律和开
环计算方法来计算电机转速的公式。
一般来说,电机转速计算公式可以分为三类:
1、根据电动机定子电阻和定子磁密度的关系确定电机的转速:
T=K/2π√(R/LR)
其中 T 为转速,单位为Hz;K为常量,取值在 0.7-3.0 之间;R、LR分别为电机定子电阻和定子磁链接,单位为Ohm。
2、根据电动机启动电流和电机转速关系计算电机转速:
Ts=Ist/Kp
其中,Ts为电机转速,单位为Hz;Ist为电机启动电流,单位为A;Kp为参数,值在0.6~1.6之间。
3、根据电机转子磁密度和电机数字控制器输入电压值确定电机转速:
Vin*n=Bd*α*θ/60
其中,Vin为电机的输入电压值,单位为V;n为电机的极数;Bd
为电机转子磁密度,单位为T;α为线圈电流传递因素,取值在
0.2~0.7之间;θ为转角,单位为°;Ts为转速,单位为Hz。
永磁同步电机参数辨识方法作者:吴茂刚吴清华来源:《中国科技博览》2016年第30期[摘要]常规的永磁同步电机参数辨识方法往往忽略逆变器死区等非线性因素,影响了参数辨识的精度。
为提高电机参数辨识的精度,本文采用无死区逆变器电路辨识电机定子电阻和直轴电感,采用常规有死区逆变器电路辨识交轴电感,采用基于最小二乘的线性回归法消除逆变器死区等非线性因素的影响,从而提高交轴电感的辨识精度。
实验结果表明,辨识值接近真实值,证明了方法的有效性。
[关键词]永磁同步电机电阻电感辨识中图分类号:TM351 文献标识码:A 文章编号:1009-914X(2016)30-0387-020 引言永磁同步电机(permanent magnet synchronous motor,PMSM)广泛应用于要求有良好静态性能和高动态响应的伺服系统中,高性能永磁同步电机矢量控制系统需要准确的电机参数[1],如电流环参数整定、最大转矩电流比控制、弱磁控制和电流解耦控制等。
参数辨识方法分为静态参数辨识和动态参数辨识,区别是电机运行状态不同,静态参数辨识方法相对简单、适合工程化应用,动态参数辨识方法相对复杂,辨识精度也往往受到局限。
目前研究的参数辨识方法主要有:最小二乘法[2]、扩展Kalman滤波法[3]、模型参考自适应法[4]、人工智能方法(神经网络[5]、模糊系统[6]、遗传算法[7]等)。
本文主要解决静态参数辨识中逆变器死区等非线性因素对辨识精度的影响,而在常规辨识方法中往往会忽略该因素的影响。
常规辨识方法采用直流实验法定子相电阻。
方法是施加直轴电压矢量,待电机定子电流进入稳态,由直轴电压与直轴电流比值计算定子电阻。
因逆变器死区等非线性因素,实际电压小于给定电压,因而计算值偏大。
常规辨识方法采用直流衰减法辨识定子直轴电感。
基本原理是通过特定的回路连接对电机加入直流电压激励,然后记录电流通过电阻的衰减曲线完成对电机参数的辨识。
不足之处是,对于测试电路有特定的要求,有时候还需要接入特定的测量仪器来辅助完成测试。
定子和转子的电阻
定子和转子是电机中的两个重要部分,它们各自具有一定的电阻。
电阻在电机运行和能量转换中扮演着重要角色,对电机性能和效率有着直接的影响。
首先,我们来看定子电阻。
定子是电机中固定不动的部分,通常由铁芯和绕组组成。
定子绕组中的导线具有一定的电阻,这个电阻被称为定子电阻。
定子电阻的大小取决于导线的材料、长度、截面积等因素。
在电机运行时,定子电阻会产生一定的热量,这是由于电流通过导线时与导线材料的电阻相互作用所致。
因此,定子电阻的设计需要考虑到散热问题,以确保电机能够长时间稳定运行。
转子电阻与定子电阻类似,也是由转子绕组中的导线产生的。
转子是电机中旋转的部分,其绕组与定子绕组通过磁场相互作用来传递能量。
转子电阻的大小同样受到导线材料、长度、截面积等因素的影响。
与定子电阻不同的是,转子在旋转过程中会产生一定的机械能,这部分能量也会转化为热量,因此转子电阻的设计同样需要考虑到散热问题。
定子和转子电阻的大小对电机的性能和效率有着重要的影响。
电阻过大会导致电机发热严重,降低效率;电阻过小则可能导致电机无法正常工作。
因此,在电机设计中,需要根据电机的具体应用需求和性能指标来合理选择定子和转子的电阻值。
同时,还需要考虑到电机的散热条件和使用环境等因素,以确保电机能够稳定、高效地运行。
教你学会检测电动机的绕组阻值、绝缘电阻、转速等参数值检测电动机性能是否正常时,可借助万用表、万用电桥、兆欧表等检测仪表检测电动机的绕组阻值、绝缘电阻、转速等参数值。
电动机绕组阻值的检测绕组是电动机的主要组成部件。
检测时,一般可用万用表的电阻挡粗略检测,也可以使用万用电桥精确检测,进而判断绕组有无短路或断路故障。
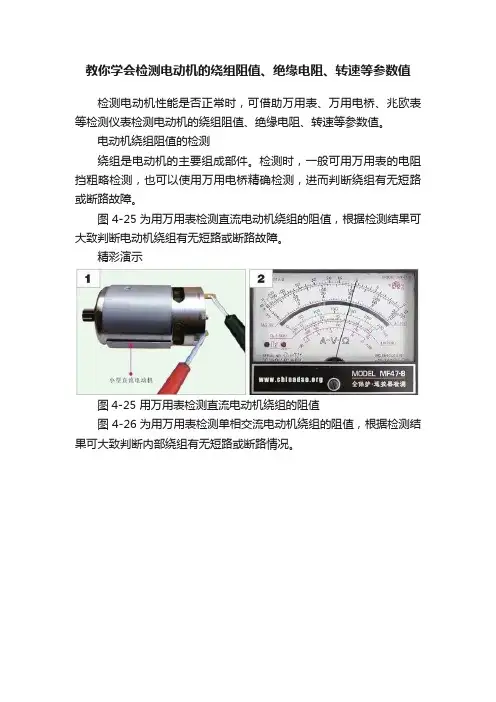
图4-25为用万用表检测直流电动机绕组的阻值,根据检测结果可大致判断电动机绕组有无短路或断路故障。
精彩演示图4-25 用万用表检测直流电动机绕组的阻值图4-26为用万用表检测单相交流电动机绕组的阻值,根据检测结果可大致判断内部绕组有无短路或断路情况。
图4-26图4-26 用万用表检测单相交流电动机绕组的阻值重要提示如图4-27所示,若所测电动机为单相电动机,则检测两两引线之间得到的三个数值R1、R2、R3应满足其中两个数值之和等于第三个值(R1+R2=R3)。
若R1、R2、R3任意一阻值为无穷大,则说明绕组内部存在断路故障。
若所测电动机为三相电动机,则检测两两引线之间得到的三个数值R1、R2、R3应满足三个数值相等(R1=R2=R3)。
若R1、R2、R3任意一阻值为无穷大,则说明绕组内部存在断路故障。
图4-27图4-27 单相交流电动机和三相交流电动机绕组阻值关系除使用万用表粗略测量电动机绕组阻值外,还可借助万用电桥精确测量电动机绕组阻值,即使微小偏差也能够被发现,这是判断电动机的制造工艺和性能是否良好的有效测试方法。
图4-28图4-28 用万用电桥精确测量三相交流电动机绕组阻值的方法(续)电动机绝缘电阻的检测电动机绝缘电阻的检测是指检测电动机绕组与外壳之间、绕组与绕组之间的绝缘电阻,以此来判断电动机是否存在漏电(对外壳短路)、绕组间短路的现象。
测量绝缘电阻一般使用兆欧表。
如图4-29所示,将兆欧表分别与待测电动机绕组接线端子和接地端连接,转动兆欧表手柄,检测电动机绕组与外壳之间的绝缘电阻。

直接转矩控制无速度传感器运行中的定子电阻辨识方法研究【摘要】本文分析了直接转矩控制无速度传感器运行时定子电阻的变化对转速辨识的影响,研究了消除转速辨识误差的方法,即消除转速辨识模型中的定子电阻参数;对定子电阻进行在线辨识或补偿。
主要阐述了直接计算法、自适应法和人工智能的方法,分析了他们各自的优缺点以及进行定子电阻辨识的必要性及有效性。
【关键词】定子电阻辨识;全阶自适应状态观测器;模型参考自适应;模糊神经网络;小波网络0 引言在传统直接转矩控制无速度传感器运行中,定子电阻rs的变化对低速性能影响很大。
rs的变化具有时变性、非线性、大惯性,强耦合等特性,且还受电机电流、运行时间、运行频率、和环境温度等多种因素影响。
而且这些因素之间难以建立确定的精确数学模型[1]。
因此,在无速度传感器运行中,必须对定子电阻进行处理,处理方法有两种:一是,在转速辨识模型中消除定子电阻变量;二是,在转速辨识的同时对定子电阻进行在线辨识,然后将辨识到的定子电阻应用到转速辨识中去。
1 定子电阻影响的分析[2]1.1 定子电阻对磁链的影响定子电阻的变化必引起定子电流的变化,从而引起定子磁链实际值与估计值产生偏差,严重影响了直接转矩系统在低速时的控制性能。
1.2 定子电阻对转矩的影响定子电阻的变化引起定子磁链实际值与估计值存在偏差,并影响转矩的计算与观测,在低速下,定子电阻的压降和电阻增量的压降不能被忽略,定子磁链发生变化,根据转矩与磁链的关系,转矩也会受到影响。
定子磁链的变化一方面将直接影响到电磁转矩的变化;另一方面,由于采用积分计算观测误差也将累积,影响磁链位置的确定,影响电压矢量的选择,使系统出现振荡。
1.3 仿真验证为了验证定子电阻对直接转矩的影响,文献[2]在给定定子电阻变化的前提下,分别在高速和低速下进行仿真试验。
通过对比,在同样的定子电阻变化条件下,高速时,系统不受定子电阻的影响,转矩、转速稳定。
而在低速时,随着定子电阻的增大到一定程度时,系统变得发散,到了9秒时定子电流,磁链都发生畸变,继而导致系统失控,不稳定。
中图分类号:T M346 文献标志码:A 文章编号:100126848(2009)0320005204一种基于转速和定子电阻自适应的感应电机全阶磁链观测器王高林,陈 伟,于 泳,徐殿国(哈尔滨工业大学,哈尔滨 150001)摘 要:提出了一种改进的全阶状态观测器对转速和定子电阻同时观测方案。
采用小信号线性化方法来分析稳定条件,将两相静止坐标系中的观测器输出误差系统变换到转子磁场旋转坐标系中,通过推导出单输入、单输出误差系统来得到满足观测器稳定性的误差反馈矩阵条件。
采用了一种改进的定子电阻自适应率以提高观测器的鲁棒性。
通过对11k W 感应电机无速度传感器转子磁场定向矢量控制实验,验证了方案的有效性。
关键词:感应电动机;转速估计;定子电阻;自适应;全阶观测器;实验Full 2order Flux O bserver Ba sed on Speed and St a torResist ance Adapt a ti on for I nducti on M otor WANG Gao 2lin,CHE N W ei,Y U Yong,XU D ian 2guo (Harbin I nstitute of Technol ogy,Harbin 150001,China )Abstract:An i m p r oved full 2order observer was p r oposed t o esti m ate s peed and stat or resistance synchr o 2nously .Stability of the s peed esti m at or is analyzed adop ting s mall 2signal linearized model .The observererr or syste m was translated int o synchr onous reference fra me .Then the err or feedback gain matrix couldbe designed thr ough the single 2input and single 2out put err or syste m t o satisfy the stability conditi ons .An i m p r oved adap tive mechanis m was p resented t o i m p r oved r obustness of the observer .The feasibility of thep r oposed sche me is verified by the ex peri m ental results of s peed sens orless field 2oriented vect or contr olled11k W inducti on mot or .Key W ords:I nducti on mot or ;S peed esti m ati on;Stat or resistance;Adaptati on;Full 2order observer ;Ex 2peri m ent收稿日期:2008203203修回日期:20092032190 引 言近年来,基于模型参考自适应系统的闭环磁链观测方法受到了广泛关注。
交流电机控制系统发展现状和前景由于近期研究成果的大量涌现,人们现在对直接转矩控制的认识更加深刻,对各种局部性能的改善也有了更多的选择方案。
因此,追求整体性能最优将成为今后直接转矩控制研究的主要方向。
通过改进系统各组成环节的内部结构来提高系统性能,其效果是非常有限的,从软件方面着手改进系统将是今后的大势所趋,智能控制会发挥越来越大的作用,成为整个系统的控制核心。
近几年发展起来的将神经网络和模糊控制结合起来的神经网络或神经网络模糊控制肯定会成为直接转矩控制的重要手段,用DSP实现的直接转矩控制系统的全数字化也是一个重要的发展方向。
交流电机控制系统发展现状和前景1.交流电机的控制方法的发展(1)恒定压频比控制方式,它根据异步电机等效电路进行变频调速。
其特点是:控制电路结构简单、成本较低。
电压是指基波的有效值,改变电压只能调节电动机的稳态磁通和转矩,而不能进行动态控制。
控制曲线会随负载的变化而变化,转矩响应慢、电机转矩利用率不高。
(2)矢量控制方式。
交流传动控制理论及实践终于在70年代取得了突破性的进展,即出现了矢量控制技术。
其实质是将交流电动机等效为直流电动机,分别对速度、磁场两个分量进行独立控制。
通过控制转子磁链,以转子磁通定向,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。
这样,通过坐标变换重建的电动机模型就可以等效为一台直流电动机。
矢量控制的方法实现了异步电机磁通和转矩的解耦控制,使交流传动系统的动态特性得到了显著的改善,开创了交流传动的新纪元。
然而,在实际系统中,由于转子磁链难以准确观测,以及矢量旋转变换的复杂性,使得实际的控制效果不如理论分析的好。
这是矢量控制技术在实践上的不足之处。
交流传动领域的专家学者也都针对矢量纯电动汽车交流异步电机及整车总成控制器的开发技术研究控制上的缺陷做过许多研究,诸如进行参数辨识以及使用状态观测器等现代控制理论,但是这些方案的引入使系统更加复杂,控制的实时性和可靠性降低。
第11卷 第6期2007年11月电 机 与 控 制 学 报ELECTR IC MACH I N ES AND CONTROLVo l 11No 6Nov .2007MRAS 感应电机定子电阻的在线辨识李健, 程小华(华南理工大学电力学院,广东广州510640)摘 要:针对感应电机定子电阻值受外界因素干扰而影响其矢量控制系统稳定性和控制精确度问题,提出了基于人工神经网络的定子电阻在线辨识方法。
为了辨识定子电阻,将人工神经网络模型的定子电流估算值与实际测量电流值的误差反馈以调整神经网络的权值。
借助MATLAB /SI M U LI NK 搭建仿真系统,验证了定子电阻在线辨识的必要性。
结果表明,该方法可以有效地对定子电阻进行在线辨识。
关键词:人工神经网络;感应电机;定子电阻;在线辨识;无速度传感器中图分类号:TM 301 2文献标识码:A文章编号:1007-449X (2007)06-0620-05Onli ne identificati on based on m odel reference adapti ve system forstator resistance of i nduction mot orLI Jian , CHENG X iao hua(Co llege of E lectric Pow er ,South China U niversity of T echno l ogy ,G uangzhou 510640,Chi na)A bstract :A novel on line i d entificati o n sche m e based on artificia l neural net w or ks fo r stato r resi s tance ofinduction m otor is proposed i n order to solve the a ffect on stab ility and prec ision by stator resistance varia tion in inducti o n m o tor vecto r contro l syste m.For the sta tor resistance i d entificati o n,the error bet w een the m easured stator current and the esti m ated stator curren t based on artifi c ial neura l ne t w ork (ANN )is back propagated to ad j u st the w e i g hts of t h e neura lnet w or k .S i m u lation syste m s are bu iltw ith the help of MATLAB /SI M ULI NK,and the necessity o f stato r resistance i d entification are verifi e d .The resu lts sho w that the stator resistance can be identified onli n e e ffectively w ith the proposed sche m e .K ey words :artific i a l neural net w orks ;induction m o tor ;stator resi s tance ;online i d entificati o n;speed sensorless收稿日期:2007-05-28作者简介:李健(1982-),男,硕士,主要研究方向为电气传动、智能控制;程小华(1963-),男,博士,教授,主要研究电机及其控制。
1 转速和定子电阻的辨识为了使无速度传感器的DTC 系统达到良好的性能,转速和定子电阻精确辨识模型的确定是很关键的。
1.1 转速的辨识1.1.1 转速的辨识模型首先根据u-n 模型来确定定子磁链和转子磁链。
转子方程:r r u r r j L R ψ+ψ-ψ=ϖσ)( (1.1) 定子方程:ss s u R i u -=ψ (1.2) 磁链方程:u u Li =ψ (1.3) r u r i L σ-ψ=ψ (1.4) 从这四个方程中可以得出只跟定子电压和定子电流有关的定子磁链Ψs a 、Ψs β 再根据方程:)(βαβs s sa s p e i i n T ψ-ψ= (1.5)同时: dtd n J T Te r p ϖ=-1 (1.6) 即能得出转速的数学模型:))((1T i i n J n s s s s p pr -ψ-ψ=βααβϖ (1.7) 定子电压和定子电流是可以精确检测的已知量,即可以通过非线性映射辨识出转速。
1.1.2 基于神经网络辨识过程和辨识结果用有导师监督式的误差反向传播的学习算法对神经网络进行训练。
输入学习样本:感应电机模型输出的定子电流和电压;输出样本:模型的输出ωr ,学习目的是用网络的实际输出y m 与目标矢量y 之间的误差ε来修改网络的权值与阈值,使网络输出层的误差平方和达到最小。
连续不断地在相对于误差函数斜率下降的方向上计算网络权值和阈值的变化,并以反向传播方式传递到各层。
若在输出层没有得到期望的输出,就计算输出层的误差变化值,将误差信号通过网络沿原来的连接通路反传回来,修改各层神经元的权值和阈值,直至神经网络输出与期望值的误差在给定精度内。
BP网络的训练。
首先用小的随机数对每一层的权值和阈值进行初始化,然后计算网络加权输入矢量、网络输出和误差矢量,算出误差平方和。
当所训练矢量的误差平方和小于目标误差或已达到设定训练的步数时,停止训练,否则在输出层计算误差变化,用反向传播学习规则来调整权值和阈值,并重复此过程,重复的次数就是训练的步数。
1 转速和定子电阻的辨识
为了使无速度传感器的DTC 系统达到良好的性能,转速和定子电阻精确辨识模型的确定是很关键的。
1.1 转速的辨识
1.1.1 转速的辨识模型
首先根据u-n 模型来确定定子磁链和转子磁链。
转子方程:
r r u r r j L R ψ+ψ-ψ=ϖσ
)( (1.1) 定子方程:
s
s s u R i u -=ψ (1.2) 磁链方程:
u u Li =ψ (1.3) r u r i L σ-ψ=ψ (1.4) 从这四个方程中可以得出只跟定子电压和定子电流有关的定子磁链Ψs a 、Ψs β 再根据方程:
)(βαβs s sa s p e i i n T ψ-ψ= (1.5)
同时: dt
d n J T T
e r p ϖ=
-1 (1.6) 即能得出转速的数学模型:
))((1T i i n J n s s s s p p
r -ψ-ψ=βααβϖ (1.7) 定子电压和定子电流是可以精确检测的已知量,即可以通过非线性映射辨识出转速。
1.1.2 基于神经网络辨识过程和辨识结果
用有导师监督式的误差反向传播的学习算法对神经网络进行训练。
输入学习样本:感应电机模型输出的定子电流和电压;输出样本:模型的输出ωr ,学习目的是用网络的实际输出y m 与目标矢量y 之间的误差ε来修改网络的权值与阈值,使网络
输出层的误差平方和达到最小。
连续不断地在相对于误差函数斜率下降的方向上计算网络权值和阈值的变化,并以反向传播方式传递到各层。
若在输出层没有得到期望的输出,就计算输出层的误差变化值,将误差信号通过网络沿原来的连接通路反传回来,修改各层神经元的权值和阈值,直至神经网络输出与期望值的误差在给定精度内。
BP网络的训练。
首先用小的随机数对每一层的权值和阈值进行初始化,然后计算网络加权输入矢量、网络输出和误差矢量,算出误差平方和。
当所训练矢量的误差平方和小于目标误差或已达到设定训练的步数时,停止训练,否则在输出层计算误差变化,用反向传播学习规则来调整权值和阈值,并重复此过程,重复的次数就是训练的步数。
学习速率决定每一次循环训练中产生的权值变化量,大的学习速率使系统不稳定,小的学习速率训练收敛慢。
采用自适应学习速率能保证网络以最大的可接受的学习速率进行训练,使网络训练在不同的阶段自动设置不同速率的大小:当新误差超过旧误差一定倍数时,学习速率减少,否则学习速率保持不变,当新误差小于旧误差,学习速率增加。
它的训练的算法程序大致如下:
随机产生初始网络参数,计算函数值
选定一个初始步长λ,计算新的迭代点
repeat
计算函数值
if(函数值变大) then
λ=λ*k {k是一个小于1的正常数}
else
λ=λ*g{g是一个大于1的正常数}
计算下一个迭代点
untile(结束条件被满足)
在Matlab6.0的工具箱中,隐含层、输出层的输出、误差函数以及权值与阈值变化量的计算已编成函数形式,其运算采用简单快速的矩阵形式。
因此在Matlab6.0环境下的Simulink中进行计算机仿真实验。
假设电机转子电阻不变,仿真时间从零到1秒,采样周期T=1ms,学习训练的样本数据为1000组。
为加快神经网络训练
时的收敛,将所训练的输入输出样本数据进行归一化处理。
该神经网络是含一个隐含层(20个神经元)的多层前馈网络,隐含层中的神经元均采用Sigmoid 型变换函数:
f (x )=x x x
x e e e e --+- (1.8)
输入和输出层的神经元均采用纯线性变换函数,采用自适应学习率BP算法对神经网络进行训练,以神经网络输出量与模型输出量的误差作为反向传播的信号,调整网络权值和阈值使误差不断减小。
训练过程是收敛的,到300步时,神经网络输出误差的均方差到达给定的要求。
通过计算机仿真,感应电机模型输出的转速的波形如图1.1所示。
可以看出,神经网络辨识的转速并不太理想。
图1.1 神经网络辨识器对速度的跟踪
1.1.3 基于小波神经网络辨识模型的确定和辨识结果
用梯度下降法辨识转速模型的确定和辨识结果
用梯度下降法训练的模型如图1.2所示:
其中:i s 和u s 为感应电机模型输出的定子电流和电压;y 为实际转速的输出,y m 为辨识的转速,ε为误差。
梯度下降法的训练过程和神经网络的训练过程一样。
基于梯度下降法的训练算法收敛慢,且有可能陷入局部最小。
采用建立在一种优化方法基础上的附加动量法能加快收敛速度。
它使网络在修正其权值时,不仅考虑误差在梯度上的作用,还考虑在误差曲面上变化趋势的影响,允许网络忽略其上的微小变化特性,滑过局部极小值。
图1.2 WNN 训练模型
同样假设电机定子电阻不变,仿真时间零到1秒,采样周期T=1ms,学习训练的样本数据为1000组。
在Matlab6.0环境下的中进行计算机仿真,小波母函数采用墨西哥草帽函数,表达式如下:
2241
2
)1(32
)(x e x x ---=Φπ (1.9)
这个函数已经被证明满足小波框架的允许条件。
仿真结果如图1.3所示:
图1.3 用梯度下降法的WNN 辨识器对速度的跟踪
从图中可以看出,用小波神经网络辨识的转速能很好的跟踪理想转速的变化,从这里可以看出,WNN 辨识器具有很好的辨识效果。