机器人制作教程
- 格式:doc
- 大小:180.50 KB
- 文档页数:6
机器人编程技术的教程与应用案例分析机器人编程技术是指通过编程控制机器人的活动和行为。
随着人工智能和机器人技术的快速发展,机器人编程技术日益受到关注。
本文将介绍机器人编程技术的基本教程和几个应用案例的分析,希望能为读者提供有关机器人编程技术的综合了解。
第一部分:机器人编程技术的基本教程1. 学习编程语言要掌握机器人编程技术,首先需要学习一种或多种编程语言。
常见的编程语言有Python、C++和Java等。
学习编程语言的基本原理和语法将为后续的机器人编程打下基础。
2. 熟悉机器人硬件机器人硬件的了解对于编程机器人非常重要。
不同的机器人有不同的传感器、执行器和控制系统。
熟悉机器人硬件的构成和工作原理可以帮助编程者更好地理解机器人的运行机制。
3. 学习机器人编程框架机器人编程框架是机器人编程的基础设施,提供了一系列的库和工具,用于控制机器人的运动、感知和决策。
一些常用的机器人编程框架包括ROS(Robot Operating System)、Autoware和NAOqi等。
学习机器人编程框架可以方便地调用各种功能,加速编写机器人程序的过程。
4. 编写机器人程序在学习了编程语言和机器人编程框架之后,可以开始编写机器人程序。
根据具体任务,编程者可以使用不同的编程方式,如顺序编程、事件驱动编程和行为树编程等。
编写机器人程序时应注意代码的可读性和模块化,以便于后续的维护和优化。
第二部分:机器人编程技术的应用案例分析1. 工业机器人工业机器人在制造业中广泛应用,可以承担重复且危险的任务,提高生产效率和质量。
编程工业机器人的技术包括路径规划、姿态控制和任务调度等。
例如,利用机器人编程技术可以实现自动化的焊接、装配和搬运等工业任务,提升企业的竞争力。
2. 服务机器人服务机器人用于提供各种服务,如导航、清洁和协助等。
编程服务机器人的技术主要涉及场景理解、语音识别和行为生成等。
例如,通过机器人编程技术可以实现智能导航、语音对话和人脸识别等功能,提升服务机器人的智能化水平。
机器人制作教程
制作机器人的材料清单:
1. Arduino主板
2. 电池盒
3. 直流电机
4. 齿轮组装件
5. 轮子
6. 距离传感器
7. 蜂鸣器
8. 导线
9. 电源线
10. 面包板
11. 陶瓷电容
12. 按钮开关
步骤:
1. 将Arduino主板安装在面包板上,连接好电源线和按钮开关。
2. 在面包板上插入陶瓷电容,并与Arduino主板相连。
3. 将直流电机与齿轮组装件连接好,并确认电机能够正常工作。
4. 将轮子安装在直流电机上。
5. 将距离传感器与Arduino主板相连,在代码中设置距离传感
器的工作模式。
6. 将蜂鸣器与Arduino主板相连,并在代码中设置蜂鸣器的工
作频率。
7. 使用导线将直流电机与Arduino主板上的电机驱动接口相连。
8. 编写控制机器人运动的代码,并上传至Arduino主板。
9. 安装电池盒并连接好电源线,确保机器人有足够的电力供应。
10. 打开按钮开关,启动机器人。
注意事项:
1. 在组装过程中,确保电路连接正确,避免短路等问题。
2. 使用适当的安全措施,如非手指触摸电路、避免过度电压等。
3. 如果机器人出现故障或异常,及时断电检查并修复问题。
4. 在编写代码时,遵循良好的编程实践,并确保代码逻辑正确。
以上是制作机器人的简要教程,希望对您有所帮助。

手把手教你做四足步行机器人用两个飞机模型舵机就能DIY个四足机器人!简单易做.你可试试.来源:机器人天空原创时间:2008-05-19第一步:准备零件和所需的材料制作一个四腿的行走机器人非常简单,所需零件也非常少,两个电机,机器人的腿(用直径合适的铁丝弯制),电池,底板(我用的是一种非常酷的塑胶材料,当它被在热水中加热时就会变软,冷却后又会回复硬度),用来将电池和电机固定在底板上的螺钉,一小块电路实验版(可以在电子市场买到),一个用来安放 ATMega的28针芯片插座,胶,烙铁和焊锡,以及刀子。
装配之前我还画了一张草图,在上面标出了需要打孔和切割的位置,有一张草图可以让你少走很多弯路,所以我建议大家在对手之前都要做一番“纸上谈兵”的工作。
第二步:现在需要用刀子在机器人的底板上划出两个安放电机的洞,我先按照草图划出一个洞后用切下来的那部分做标尺直接在另一边划另外一个洞。
切的时候不要忘了在下面垫一块纸板,我差一点切了我的咖啡桌。
打好两个洞后试一试电机,我划的洞似乎稍微宽了一点,长度倒是刚好。
第三步:弯曲底板,安装电机很不幸,本人手劲不足,无法直接把底板弯曲成照片中的角度,只好采用技术含量比较高的办法:首先烧一壶开水然后将底板放入水中一到二分钟,主要要用一个东西按住底板,免得它浮上来(不要用手!)。
拿出来后底板应该软一些了,戴着手套将它弯曲到自己想要的角度直到冷却。
根据网上高手的建议,最佳角度为30度。
钻上两个螺纹孔,然后用螺钉将电机固定在底板上。
第四步:固定腿部到伺服电机的十字臂我用尖嘴钳截了两段粗铜线作为机器人的前腿和后腿,然后把它们弯曲成适合伺服电机的十字臂的形状。
一条经典的BEAM准则就是需要连接零件时,如果可能的话尽量采用铁丝来捆绑。
用铁丝捆绑要优于采用焊锡连接。
用铁丝捆绑的话会给零件一定的自由空间,并且也利于零部件的再次使用。
第五步:关键的一步:将固定好腿部零件的十字臂装在伺服电机上将绑上了腿部的十字臂固定到伺服电机上,然后用钳子小心地把机器人的前后腿一点点折到图中所示位置。
人工智能机器人的编程和控制教程人工智能(AI)机器人是指具备人类智能和学习能力的机器人。
随着科技的不断发展,人们对于人工智能机器人的需求也越来越大。
作为一名开发人工智能机器人的程序员或爱好者,掌握机器人编程和控制是非常重要的。
本文将介绍人工智能机器人的编程和控制教程,让读者了解从基础到高级的编程技术和控制策略,帮助读者开始自己的人工智能机器人编程之旅。
1. 硬件与软件准备在开始编程和控制人工智能机器人之前,我们需要准备一些硬件和软件设备。
硬件方面,常见的人工智能机器人包括机器人身体、传感器、摄像头、运动控制器等。
软件方面,我们需要安装编程环境,如Python、C++等编程语言的集成开发环境(IDE),并安装相关的机器人控制软件开发包(SDK)。
2. 了解机器人的基本知识在进行机器人编程之前,我们需要对机器人的基本知识有一定的了解。
了解机器人的不同部分(如传感器、执行器、控制器等),以及它们的作用和相互之间的关系。
了解机器人的基本运动原理和运动学,包括机器人的姿态和位置表示方法、坐标系等。
3. 学习编程语言和机器人控制软件开发包编程语言是机器人编程的基础,选择一种适合自己的编程语言学习(如Python、C++等)。
学习如何使用机器人控制软件开发包,通过该软件包可以方便地与机器人进行通信、控制和数据交互。
4. 传感器数据采集和处理传感器是机器人获取外界信息的重要装置,了解和学习常见的传感器类型(如摄像头、声音传感器、距离传感器等)。
学习如何使用编程语言和机器人控制软件开发包,获取传感器数据并进行处理和分析。
5. 运动控制和路径规划掌握机器人的运动控制技术,学习如何使用编程语言和机器人控制软件开发包控制机器人的运动。
学习路径规划算法,使机器人能够在复杂环境中避障或寻找最优路径。
6. 计算机视觉和图像处理了解计算机视觉和图像处理的基本原理和技术。
学习如何使用机器人控制软件开发包进行图像采集、处理和识别,实现机器人的视觉能力。
幼儿园制作蒸汽机器人教程幼儿园制作蒸汽机器人教程第一步:材料准备为了制作蒸汽机器人,我们需要准备以下材料:1. 空的塑料瓶(最好是500毫升以上的容量)- 用作机器人的身体2. 钉子或其他尖锐的金属材料- 用于制作机器人的眼睛和嘴巴3. 扁平的金属制品(如破旧的铁罐盖)- 用于制作机器人的手和脚4. 铝箔纸- 用于包裹机器人的身体5. 热胶枪和胶棒- 用于固定机器人的部件第二步:制作机器人的身体1. 将塑料瓶的底部切掉,这将成为机器人的头部和身体。
2. 在切口处用热胶固定金属材料,制作机器人的眼睛和嘴巴。
你可以使用钉子来代表眼睛和嘴巴。
3. 在机器人头部的两侧,用热胶固定金属制品,制作机器人的手臂。
确保手臂能够自由运动。
4. 在机器人身体的底部,用热胶固定金属制品,制作机器人的脚部。
同样,确保脚部能够自由运动。
第三步:包裹机器人的身体1. 使用铝箔纸将机器人的身体包裹起来。
确保将整个身体都覆盖住,使其看起来像一个真正的机器人。
2. 使用热胶固定铝箔纸,以确保它不会松动或脱落。
第四步:制作机器人的蒸汽部分1. 将热胶枪加热并将其固定在机器人的身体一侧。
2. 将细长的管子连接到热胶枪上,并从机器人的另一侧伸出。
这将成为机器人的蒸汽喷射口。
3. 在机器人的头部部分,用热胶固定一个小盒子,盒子之间的连接处要与热胶枪的管子对齐。
这个小盒子将用于放置水和产生蒸汽。
第五步:使用蒸汽机器人1. 将适量的水倒入小盒子中。
确保不要加太多水,否则机器人可能会漏水。
2. 将机器人的蒸汽喷射口对准你想要喷射的方向。
3. 开始加热热胶枪并等待一段时间,直到水开始变成蒸汽。
4. 一旦蒸汽产生,机器人就会开始喷射蒸汽了!注意事项:1. 在制作过程中,一定要小心使用热胶枪。
成人的帮助和监督是必要的。
2. 当使用蒸汽机器人时,确保站在安全位置并远离机器人的喷射口。
3. 这个蒸汽机器人是一个有趣的教育玩具,但请小心不要造成任何伤害或破坏。
两年前,爸爸给我买了套机器人组合套件,希望我在进入小学高年级之前掌握基本的机器人知识。
去年暑假爸爸辅导我阅读《简易机器人制作(zhìzuò)》(江苏教育)一书,开始学习认识机器人,掌握初级的计算机控制和简单的机械知识。
这个寒假我利用所掌握的知识,在爸爸指导下,开始实际制作一个简单的完整模型——智能机器人小车。
一、小车功能(gōngnéng)介绍智能机器人小车可独立(dúlì)完成4个功能:1、小车(xiǎochē)碰壁拐弯——小车在行进过程中碰到障碍物倒退拐弯并继续前行;2、小车悬崖回头——小车在浅色水平桌面行进(xíngjìn),探测到行进方向是桌子边沿时停步并转弯回头;3、小车边走边唱——小车在行进过程中播放音乐;4、小车走8字——小车按照8字的形状行走;二、设计思路最初爸爸找到一个类似范例,但由于结构件不同,而且没有源程序,我们参考了这个范例的结构和功能,经过独立思考,多次实验调测,完成这个小车的制作。
1、确定任务依照不同程序,能够分别使小车完成碰壁拐弯、边走边唱、悬崖回头和走8字。
2、确定总方案根据任务确定智能小车所需完成的动作,小车需要具备探测障碍物、探测桌面边沿(biānyán)、以及相应需要完成的前进、后退、拐弯、唱歌这些动作。
3、结构设计结构设计成有两个电机分别控制两个后轮,前轮使用一个万向轮,另外需要一个接触传感器和一个双光反射传感器。
结构上需要将接触传感器触点放在小车最前端,双光反射传感器设在接触传感器稍微靠后的位置,面向地面,距地面8-10mm。
结构设计中的难点是万向轮很容易卡住,连接线不够(bùgòu)长影响控制板安装位置。
4、控制电路设计(shèjì)控制电路要设计成让传感器(接触传感器、光反射传感器)判断有没有信号,然后(ránhòu)确定两个电机正转或反转,实现小车前进、后退和拐弯这些动作。
工业机器人的编程教程工业机器人是现代生产中的关键组成部分,它们能够执行复杂的任务,极大地提高了生产效率和质量。
然而,要使工业机器人发挥最大的作用,需要进行编程,以指导机器人的动作和行为。
本文将为您介绍工业机器人的编程教程,帮助您掌握这一重要的技能。
1. 了解机器人编程的基础知识在开始学习工业机器人的编程之前,有一些基础知识是必要的。
首先,您需要了解机器人的基本结构和工作原理。
机器人通常由关节、传感器、控制系统等组件组成,能够根据预定的程序自动执行任务。
其次,您需要熟悉编程语言和编程环境,例如,常用的工业机器人编程语言包括RoboBasic、KAREL和RAPID等。
2. 学习基本的机器人编程语法一旦您掌握了机器人编程的基础知识,就可以开始学习机器人编程语法了。
机器人编程语言通常具有一定的特点,例如,指令集简单、易于理解和使用。
在学习过程中,您可以通过阅读相关的教材和文档,或者参加培训班来深入了解机器人编程语法。
同时,通过编写简单的程序来加深对语法规则的理解和掌握。
3. 掌握机器人运动控制机器人编程的一个重要方面是掌握机器人的运动控制。
您需要学习如何指导机器人进行各种动作,例如,移动、抓取、旋转等。
通常,机器人的运动控制是通过设定关节角度、坐标点等方式来实现的。
在编程过程中,您需要了解机器人的运动学和逆运动学,以及相应的算法和公式。
4. 学习机器人的传感器应用传感器在工业机器人中扮演着重要角色,能够使机器人具备感知和反应能力。
学习机器人的传感器应用是编程的关键一步。
例如,您可以学习如何使用视觉传感器来进行目标识别和跟踪,如何使用力传感器来进行力控制和装配等。
通过了解不同类型的传感器及其原理,您可以更好地应用它们来实现机器人的智能化。
5. 解决问题和调试在进行机器人编程过程中,您可能会遇到各种问题和错误。
因此,解决问题和调试是编程过程中不可或缺的一部分。
当程序无法正常运行时,您可以使用调试工具来查找错误并对程序进行修复。
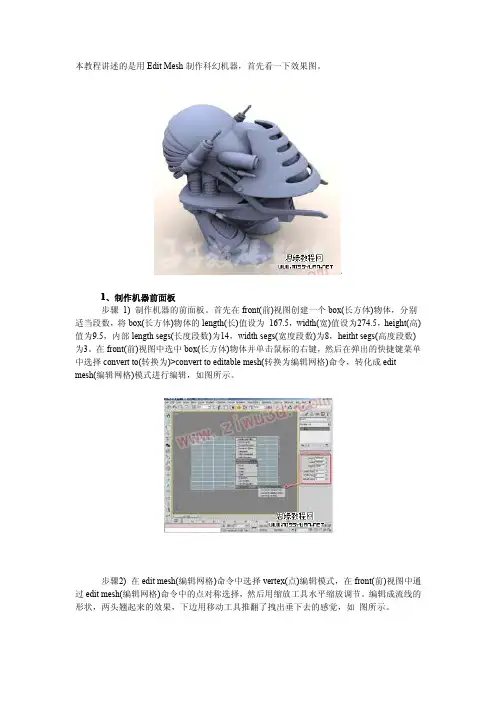
本教程讲述的是用Edit Mesh制作科幻机器,首先看一下效果图。
1、制作机器前面板步骤1)制作机器的前面板。
首先在front(前)视图创建一个box(长方体)物体,分别适当段数,将box(长方体)物体的length(长)值设为167.5,width(宽)值设为274.5,height(高)值为9.5,内部length segs(长度段数)为14,width segs(宽度段数)为8,heitht segs(高度段数)为3。
在front(前)视图中选中box(长方体)物体并单击鼠标的右键,然后在弹出的快捷键菜单中选择convert to(转换为)>convert to editable mesh(转换为编辑网格)命令,转化成edit mesh(编辑网格)模式进行编辑,如图所示。
步骤2)在edit mesh(编辑网格)命令中选择vertex(点)编辑模式,在front(前)视图中通过edit mesh(编辑网格)命令中的点对称选择,然后用缩放工具水平缩放调节。
编辑成流线的形状,两头翘起来的效果,下边用移动工具推翻了拽出垂下去的感觉,如图所示。
步骤3)在edit mesh(编辑网格)命令中选择polygon(多边形)编辑模式,在front(前)视图中选择条形的面并将其删除。
删除面是为了做出镂空的效果,按键盘上的del(删除)键和edit mesh(编辑网格)命令中的delete(删除)命令都可以,效果是相同,如图。
步骤4)在edit mesh(编辑网格)命令中选择edge(边)编辑模式,下面把刚刚删除面的边缘线全部选择起来,通过extrude(挤压)命令挤出一组新面,并且通过移动工具,移动至另一侧的边缘的位置,把删除后的缺口修补上,如图。
步骤5)在edit mesh(编辑网格)命令中选择vertex(点)编辑模式,选择刚挤出新面上的点和边缘上的点,想把它们焊成一个点,通过焊接下的selected(已选择的)工具把选择的点焊接到一块,如图所示。
小创客机器人教程第八课独眼机器人小朋友们,欢迎来到小创客机器人教程的第八课!今天我们要一起动手制作一个超级有趣的独眼机器人。
在开始之前,让我们先准备好所需的材料和工具。
我们需要一些电子元件,比如电池盒、电机、电线、开关,还需要一些机械零件,像是齿轮、螺丝、螺母,当然啦,最重要的是一块控制板,还有一个独眼造型的外壳。
为了方便操作,我们还要准备好螺丝刀、剪刀、电烙铁这些工具。
接下来,让我们开始动手吧!第一步,先把电池盒安装好。
找到一个合适的位置,用螺丝把电池盒固定住,然后把电池装进去,注意电池的正负极不要装反哦。
第二步,安装电机。
电机是让我们的独眼机器人动起来的关键。
把电机用螺丝固定在合适的位置,然后通过齿轮和传动轴把电机的动力传递出去。
第三步,连接电线。
这一步可要小心一点,用电烙铁把电线焊接在相应的位置上,确保连接牢固,不会松动。
第四步,安装控制板。
控制板就像是机器人的大脑,控制着它的一举一动。
把控制板固定好,然后按照说明书把电线连接到对应的接口上。
第五步,组装外壳。
这是最有趣的一步啦!把独眼造型的外壳小心地安装在已经组装好的零件上,让我们的机器人看起来更加可爱和独特。
在组装的过程中,可能会遇到一些小问题。
比如螺丝拧不紧,电线连接不上等等。
这时候不要着急,仔细检查一下哪里出了问题,然后慢慢解决。
当我们把所有的零件都组装好之后,就可以打开开关,看看我们的独眼机器人是不是能够按照我们的想法动起来啦!如果它没有动,别灰心,再仔细检查一遍各个部分的连接是否正确。
制作独眼机器人不仅能够锻炼我们的动手能力,还能让我们学到很多关于电子、机械和编程的知识。
而且,当我们看到自己亲手制作的机器人动起来的时候,那种成就感简直太棒了!小朋友们,希望你们在制作独眼机器人的过程中能够享受到创造的乐趣。
如果你们还有什么疑问或者想法,都可以和小伙伴们一起交流讨论,说不定还能想出更多有趣的改进方案呢!现在,拿起你们的工具,开始动手制作属于你们自己的独眼机器人吧!相信你们一定可以的!。
工业机器人编程和调试教程工业机器人的出现和广泛应用大大提高了生产力和生产效率。
为了使工业机器人能够正常工作,工程师们需要进行编程和调试。
本文将向您介绍工业机器人编程和调试的基本步骤和技巧,帮助您顺利完成任务。
一、准备工作在开始工业机器人编程和调试之前,我们需要准备一些必要的工具和资料。
首先,您需要了解所使用的机器人品牌和型号,并下载和安装相应的机器人编程软件。
其次,确保您具备一定的机器人基础知识,包括机器人组成部分、机器人运动轨迹等。
最后,准备好机器人的用户手册、技术规格和相关文档,以便查询和参考。
二、编程环境搭建在进行工业机器人编程之前,我们需要为机器人搭建一个适合的编程环境。
首先,确保机器人连接到电源并开启,然后连接机器人与计算机的通信线缆。
接下来,配置机器人编程软件,设置机器人的IP地址和端口号,确保计算机能够与机器人进行通信。
最后,根据机器人的运动轨迹和任务需求,设置工作区域和安全区域,确保机器人的运动范围和安全性。
三、编程和调试步骤1. 程序编写在进行工业机器人编程之前,我们需要先制定一个程序。
根据机器人的任务需求,确定机器人的运动轨迹、路径规划和执行顺序。
使用机器人编程软件,编写程序并进行调试。
程序的编写包括定义变量、设置运动方向和速度、配置传感器和执行器等。
2. 轨迹规划轨迹规划是指确定机器人的运动轨迹和路径。
根据机器人的工作空间和任务需求,选择合适的运动轨迹规划算法。
常用的轨迹规划算法包括线性插值、圆弧插值和样条插值等。
通过调整机器人的关节角度和位置,使其按照预设的轨迹规划进行运动。
3. 运动控制运动控制是实现机器人运动的关键步骤。
通过控制机器人的关节角度和速度,实现机器人的准确运动。
编程软件提供了不同的运动控制功能,如位置控制、速度控制和力控制等。
根据机器人的任务需求和工作空间,选择合适的运动控制方法。
4. 程序调试编程和调试是工业机器人开发过程中的重要环节。
在进行程序调试之前,我们需要先对程序进行模拟和验证。
Arduino制作入门教程Arduino制作入门教程欢迎阅读本教程,本文将详细介绍如何制作一个简单的Arduino。
通过本教程,您将学习如何选购适合的硬件设备、组装、编写控制程序以及进行基本的操作。
请按照以下章节进行操作。
第一章:准备工作在开始制作之前,您需要准备以下材料:1、Arduino主板2、电机驱动模块3、直流电机4、轮子5、电池盒及电池6、连接线7、螺丝刀、钳子等工具第二章:硬件连接1、连接电机驱动模块与Arduino主板2、连接电机与电机驱动模块3、连接电池盒与Arduino主板第三章:编写控制程序1、在Arduino开发环境中创建一个新的项目2、导入所需的库文件3、编写程序来控制的运动4、程序到Arduino主板第四章:运动控制1、编写前进、后退、左转、右转等基本运动函数2、调用这些函数来控制的运动3、验证的运动控制是否正常第五章:附加功能1、添加超声波传感器以实现避障功能2、添加红外线传感器以实现寻迹功能3、添加蓝牙模块以实现远程控制功能第六章:测试与优化1、对的各个功能进行测试2、根据测试结果对程序进行优化3、重复测试与优化的过程,直到达到预期效果附件:本文档涉及的附件包括:1、示意图:Arduino连接示意图2、代码示例:控制运动的示例代码法律名词及注释:1、Arduino - Arduino是一块便捷灵活、方便上手的开源电子原型平台,包含硬件(各种型号的Arduino主板)和软件(Arduino 开发环境)。
2、蓝牙模块 - 一种无线通信模块,可实现通过蓝牙技术与其他设备进行通信。
3、超声波传感器 - 一种可以测量距离的传感器,利用声波的传播时间来计算与障碍物的距离。
4、红外线传感器 - 一种可以检测红外线信号的传感器,常用于寻找和跟踪物体的位置。
机器人制作教程机器人制作教程第一步:准备所需材料在制作机器人之前,你需要准备以下材料:1. 主控板:这是机器人的大脑,负责控制机器人的各个部分。
2. 电机:用来让机器人行动,可以选择直流电机或者步进电机。
3. 传感器:用来感知环境,常用的传感器有超声波传感器、红外线传感器等。
4. 电源:提供机器人运行所需的电能。
5. 齿轮、轮子等机械部件:用来构建机器人的机械结构。
6. 电线、电池盒等电子元件:用来连接电路和供电。
除了以上的基本材料,你还可以根据需要选择其他附加部件,比如LED灯、喇叭等。
第二步:设计机器人的外观和功能在开始制作机器人之前,你需要根据自己的需求和创意设计机器人的外观和功能。
你可以选择制作一个会走路的机器人,也可以是一个可以与人对话的机器人,甚至是一个能够处理简单任务的机器人。
确定了机器人的外观和功能之后,你可以绘制草图或者使用3D建模软件来设计出机器人的外观。
第三步:搭建机器人的机械结构根据设计好的外观图纸或者3D模型,你可以开始搭建机器人的机械结构。
首先,使用齿轮、轮子等机械部件搭建机器人的底盘和运动部分。
根据需要,你可以制作一个两足机器人、四足机器人,或者是履带式机器人。
然后,根据机器人的外观设计,使用金属、塑料等材料制作机器人的外壳和其他部件。
第四步:连接电路和编写程序将主控板、电机、传感器等电子元件连接起来,组成机器人的电路。
首先,根据电路图将各个元件连接到主控板上。
确保连接的电线没有接错位置,以免导致电路失效。
然后,使用编程软件编写机器人的程序。
根据机器人的功能需求,编写相应的控制程序,使机器人能够根据传感器的反馈控制自己的行动。
在编写程序时,你可以使用C语言、Python等编程语言,根据主控板的支持情况选择相应的开发环境。
第五步:测试和调试在完成机器人搭建和程序编写之后,你需要对机器人进行测试和调试。
首先,确保机器人的各个部分都能够正常工作,检查电路连接是否正确,电机和传感器是否能够正常运行。
手工制作机器人幼儿园,幼儿园创意手工机器人教程这是手工制作机器人幼儿园,幼儿园创意手工机器人教程,是优秀的中班科学教案文章,供老师家长们参考学习。
手工机器人纸盒做法幼儿园1、,用剪刀在纸盒上戳几个孔:小盒子的顶部和底部中心戳1相对的孔、大盒子的顶部戳1个孔、大盒子两侧相对的位置也各戳1孔好安装手臂。
2,将大小盒子、吸管和卫生纸筒都用锡箔纸包起来,连接处以胶水或者胶带固定牢固。
2、用纸箱做最简单的机器人步骤如下:用剪刀在纸盒上戳几个孔:小盒子的顶部和底部中心戳相对的孔,大盒子的顶部戳一个孔,大盒子两侧相对的位置也各戳一个孔好安装手臂。
3、首先,找个大小合适的方箱子做头部,剪出眼睛,如下图所示。
然后,用一整块做身体,身后用麻绳绑紧点,如下图所示。
再把准备好的机器人的头戴好,如下图所示。
立体机器人手工怎么做1、用雪花片粘贴在木板下面,粘贴如图所示。
车轮当作眼睛粘贴上,小马达装上,如图。
拿一根木棍和一块木板如图粘贴在机器人的头部下面。
准备两个瓶盖备用。
瓶盖粘贴上去当作是鞋子。
2、准备材料:纸板、剪刀、胶水、彩色笔等。
在纸板上画出机器人的形状,可以参考网络上的图片或自己设计。
根据画好的形状,将纸板剪下来,并将机器人的各个部件分别剪出来。
3、首先准备好几个纸箱待用即可。
接下来需要固定好机器人的身体,如图所示。
接下来需要再固定好头部,如图所示。
接着是固定好手,可以使用两个空烟盒,如图所示。
4、准备好做机器人用的所有工具材料:大小纸盒、纸杯、纸、笔、剪刀、双面胶等。
首先取过长方形纸盒,将A4纸覆盖在上面,用双面胶粘住。
再取过正方形纸盒,用同样方法,将正方形纸盒粘好。
5、将电池盒固定在机器人的背面;将电子元件连接到电池盒和机器人的腿部和手臂上;调整齿轮的位置和方向,确保机器人能够正常运转。
到这里,你就可以为孩子制作一个完整的立体机器人了。
6、先准备好一张正方形的彩纸15*15,首先把彩纸折出三等分,然后再把四条边向着第一道折痕翻折,同样是要折痕。
两年前,爸爸给我买了套机器人组合套件,希望我在进入小学高年级之前掌握基本的机器人知识。
去年暑假爸爸辅导我阅读《简易机器人制作》(江苏教育)一书,开始学习认识机器人,掌握初级的计算机控制和简单的机械知识。
这个寒假我利用所掌握的知识,在爸爸指导下,开始实际制作一个简单的完整模型——智能机器人小车。
一、小车功能介绍
智能机器人小车可独立完成4个功能:
1、小车碰壁拐弯——小车在行进过程中碰到障碍物倒退拐弯并继续前行;
2、小车悬崖回头——小车在浅色水平桌面行进,探测到行进方向是桌子边沿时停步并转弯回头;
3、小车边走边唱——小车在行进过程中播放音乐;
4、小车走8字——小车按照8字的形状行走;
二、设计思路
最初爸爸找到一个类似范例,但由于结构件不同,而且没有源程序,我们参考了这个范例的结构和功能,经过独立思考,多次实验调测,完成这个小车的制作。
1、确定任务
依照不同程序,能够分别使小车完成碰壁拐弯、边走边唱、悬崖回头和走8字。
2、确定总方案
根据任务确定智能小车所需完成的动作,小车需要具备探测障碍物、探测桌面边沿、以及相应需要完成的前进、后退、拐弯、唱歌这些动作。
3、结构设计
结构设计成有两个电机分别控制两个后轮,前轮使用一个万向轮,另外需要一个接触传感器和一个双光反射传感器。
结构上需要将接触传感器触点放在小车最前端,双光反射传感器设在接触传感器稍微靠后的位置,面向地面,距地面8-10mm。
结构设计中的难点是万向轮很容易卡住,连接线不够长影响控制板安装位置。
4、控制电路设计
控制电路要设计成让传感器(接触传感器、光反射传感器)判断有没有信号,然后确定两个电机正转或反转,实现小车前进、后退和拐弯这些动作。
5、控制软件设计
软件设计首先需要制定机器人控制的输入输出分配方案:
根据所要完成的任务,绘制出控制软件的流程图草案,并最终完成软件程序流程。
6、组装调试
根据设计安装好小车,并将完成的程序写入主控制器中,然后让它试运行,再找出结构或程序的问题,不断的调试,直到将问题解决。
三、制作总结
制作成功这个智能机器人小车,我感觉很有成就感。
这个制作加深了我对计算机控制基本知识的理解,激发了我继续深入学习机器人制作的兴趣。
在现有小车的结构下,我还将编写新的控制程序,完成小车的第五个动作——沿黑线轨迹行走,并且进一步通过学习子程序的调用,把小车的五个动作集合到一起,通过接触传感器预先设定,完成不同的动作。
未来还计划把这个小车改装成一个服务机器人,可以在不同的指定位置拿水杯、倒水和放杯。
附录一、智能机器人小车外观介绍
附录二、程序流程
体验新版博客。