机器人基础学习IRC控制系统
- 格式:ppt
- 大小:42.11 MB
- 文档页数:120

基础学习资料(IRC5控制系统) 基础学习资料(IRC5控制系统)章节一、概述- 介绍基础学习的重要性和目的- 简要介绍IRC5控制系统的基本概念和特点- 提供学习基础所需的前置知识和基本要求章节二、安全- 详细介绍安全相关的法律法规及安全标准- 解释工作区域和紧急停止系统的设置要求- 提供安全操作的基本原则和注意事项章节三、IRC5控制系统介绍- 详细介绍IRC5控制系统的硬件组成和基本功能- 解释IRC5控制系统的编程语言和编程方法- 提供IRC5控制系统的常见故障排除和维护方法章节四、运动控制- 介绍运动学和动力学基础知识- 解释关节空间和笛卡尔空间运动控制方法- 提供路径规划和插补算法的实例章节五、传感器与感知- 介绍常用的传感器类型和原理- 解释传感器数据的获取和处理方式- 提供感知环境和对象的实际案例章节六、应用案例- 提供在各个领域应用的案例研究- 解释应用案例中的技术原理和具体实施方法- 分析应用案例的优势和限制章节七、学习资源推荐- 推荐相关的学习教材、视频教程和在线资源- 提供相关基础学习的学习计划和方法- 解释如何在实践中进一步深入学习和应用技术附件:- 附件一、IRC5控制系统用户手册- 附件二、安全操作指南- 附件三、运动学和动力学教材- 附件四、传感器应用手册法律名词及注释:1、安全法律法规:包括《安全管理条例》等相关法律法规,用于规范的安全操作和管理。
2、紧急停止系统:指用于紧急情况下停止运动的装置或按钮。
3、关节空间:运动的自由度通过关节角度来表示的空间。
4、笛卡尔空间:运动的自由度通过坐标表示的空间。
本文档涉及附件:1、IRC5控制系统用户手册2、安全操作指南3、运动学和动力学教材4、传感器应用手册。
ABBIRC5机器人培训教材(带附加条款)ABBIRC5培训教材1.引言随着工业自动化技术的不断发展,已经成为了制造业中不可或缺的一部分。
ABB公司作为全球领先的工业供应商,其IRC5系统在各个领域得到了广泛应用。
为了帮助用户更好地了解和使用ABBIRC5,本文将提供一份详细的培训教材,内容包括ABBIRC5的基本原理、操作方法、编程技巧以及维护保养等方面。
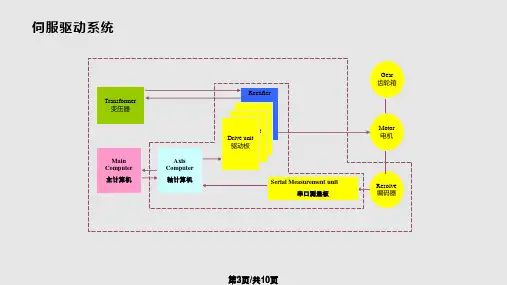
2.ABBIRC5基本原理2.1结构ABBIRC5由机械臂、控制柜、示教器等部分组成。
机械臂是由一系列连杆和关节组成的,可以实现多种运动方式,如旋转、俯仰、伸缩等。
控制柜是的大脑,负责控制整个的运行。
示教器是操作者与交互的界面,通过示教器可以实现对的编程、调试和监控。
2.2控制系统ABBIRC5采用基于PC的控制系统,运行Windows操作系统。
控制系统中集成了运动控制卡、输入输出卡、安全监控卡等硬件设备,可以实现高速、精确的运动控制和实时数据处理。
ABBIRC5还支持多种编程语言,如RAPID、等,方便用户进行编程和二次开发。
3.ABBIRC5操作方法3.1示教器操作显示屏:用于显示的状态、程序、参数等信息。
键盘:用于输入数据和指令。
功能键:用于快速选择常用的功能菜单。
旋钮:用于调整的速度和加速度。
3.2编程操作面向对象:RAPID编程语言采用面向对象的设计思想,将的动作和功能封装为对象,方便用户进行编程和调用。
模块化:RAPID编程语言支持模块化编程,用户可以将程序分解为多个模块,提高程序的可读性和可维护性。
可扩展:RAPID编程语言支持用户自定义函数和变量,方便用户进行二次开发。
4.ABBIRC5编程技巧4.1程序结构设计初始化部分:用于初始化、设置参数、定义变量等。
主程序部分:用于实现的主要功能,如运动、抓取、放置等。
子程序部分:用于实现的辅助功能,如计算路径、检测物体等。
异常处理部分:用于处理程序运行中的异常情况,如碰撞、设备故障等。



IRC5控制器简介IRC5是ABB机器人控制器的最新型号,具有高性能、高可靠性和易于使用的特点。
IRC5控制器采用先进的计算机技术和控制算法,实现了对机器人的高精度、高速度和高效率的控制。
IRC5控制器具有丰富的接口和功能,可以与各种外围设备和传感器进行连接和通信,实现复杂的自动化应用。
ABB 机器人可以应用于各种焊接工艺,如点焊、弧焊、激光焊等,提高焊接质量和效率。
焊接ABB 机器人可以应用于各种搬运任务,如物料搬运、码垛、拆垛等,减轻人工劳动强度。
搬运ABB 机器人可以应用于各种装配任务,如零件装配、设备调试、检测等,提高装配精度和效率。
装配ABB 机器人可以应用于各种喷涂工艺,如喷漆、喷粉、喷胶等,提高喷涂质量和效率。
喷涂机器人应用领域在操作ABB机器人之前,必须仔细阅读和理解本手册中的安全操作规范。
在机器人工作区域内,禁止非授权人员进入或停留。
在操作机器人时,必须穿戴好安全防护用品,如安全帽、安全鞋、防护服等。
在进行机器人维护和保养时,必须按照规定的程序和要求进行操作,确保人员和设备的安全。
安全操作规范01开机流程02关机流程首先确保机器人周围环境安全,然后打开控制柜电源,启动示教器,等待系统自检完成后即可进行操作。
在结束机器人操作后,需要先将机器人回到安全位置,然后关闭所有程序和任务,最后关闭示教器和控制柜电源。
开机与关机流程01单轴运动通过示教器上的操纵杆或按键,可以实现机器人的单轴运动,便于调整机器人位置和姿态。
02线性运动通过示教器上的线性运动功能,可以实现机器人在直角坐标系下的直线移动。
03重定位运动通过示教器上的重定位运动功能,可以实现机器人在保持姿态不变的情况下,移动到指定位置。
手动操纵机器人工具坐标系工具坐标系是定义在机器人末端执行器上的坐标系,用于描述工具的位置和姿态。
基坐标系基坐标系是定义在机器人基座上的坐标系,用于描述机器人整体的位置和姿态。
大地坐标系大地坐标系是定义在机器人工作空间中的固定坐标系,用于描述工作空间中物体的位置和姿态。