基于制导炮弹的过重力补偿比例导引律优化设计
- 格式:docx
- 大小:392.21 KB
- 文档页数:8

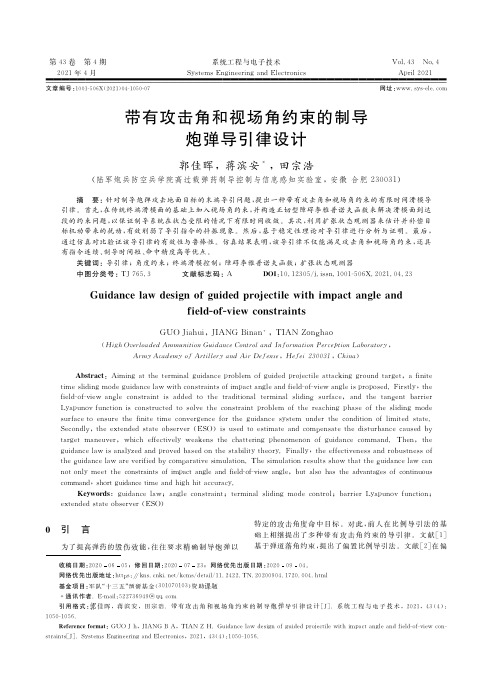
过重力补偿比例导引弹道仿真研究蒋 明, 宋卫东(军械工程学院兵器测试中心,河北 石家庄 050003)[摘 要] 激光半主动末制导炮弹能实现对目标的“攻顶”效应,分析了“攻顶”技术及其理论实质,即过重力补偿比例导引律的应用,以弹丸和目标的相对运动方程为基础,通过M atlab仿真计算的方法,分析了比例导引系数、弹丸与目标的速度比、过重力补偿值等主要参数的变化对弹道性能的影响,提出了导引律实现中注意的几个问题及改进制导系统的建议.[关键词] 导引规律; 比例导引法; 过重力补偿; 弹道; 仿真[中图分类号] TJ765.4 [文献标识码] AResearch on the Proporti ona l Nav i ga ti on w ith Co m pen s a ti on overGrav ity Tra jectory S im ul a ti onJ iang M ing, Song W eidong(W eapons Test Centre,O rdnance Engineering College,Shijiazhuang 050003,China)Abstract:Laser Se m i2active Ter m inal Hom ing Pr ojectile can actualize attack on the t op of the target.It is analyzed that the technique of t op2attack and its theoretical matter is the app licati on of the Pr oporti onal Navigati on with Compensati on over Gravity.Based on the relative move ment equati on gr oup of the p r ojec2 tile and the target,using Matlab t o make the si m ulati on and calculati on,it is analyzed that the affecti on of the maj or para meter’change t o the traject ory,such as p r oporti onal navigati on quotiety,the vel ocity ra2 ti o of p r ojectile and target,the compensati on over gravity,and s o on.Some p r oble m s in the actualizati on of guidance and s ome suggesti on on the i m p r ove ment of the guidance and contr ol syste m are offered in the paper.Keywords:guidance la w; p r oporti onal navigati on; compensati on over gravity; traject ory; si m ula2 ti on1 引 言比例导引(P N)是一种有效的寻的制导规律,广泛应用于自寻的战术导弹和制导炮弹的的末段制导[1].由于在实际应用中还要考虑到目标机动、许用过载、末段落角约束等条件的制约,因此须对比例导引加以改进以满足作战要求.以攻击工事和装甲目标的顶部(简称“攻顶”)为主要战术性能的激光半主动末制导炮弹在其弹道末制导段采用了一种论实质,以弹丸和目标的相对运动方程为基础,计算分析主要弹道参数对弹道性能的影响,提出制导系统设计和导引律实现中应注意的几个问题.2 末制导炮弹的“攻顶”技术激光半主动末制导炮弹的“攻顶”技术主要基于比例导引律的实现.2.1 比例导引在末制导中的实现制导炮弹的末制导段采用比例导引来提高命中精度,即弹丸速度矢量V 的转动角速度σ·正比于目标视线的转动角速度q ·,其数学表达式为:σ·=k ·q·(1) 弹丸头部的导引头是弹载核心部件,为一陀螺跟踪装置,它能测量出弹丸目标之间连线即目标视线的角速度,通过制导系统的运算和信号变换,形成与目标视线角速度成正比例的控制信号.在该控制信号的作用下导引头修正线圈产生修正力矩,使导引头陀螺向目标方向进动,驱使导引头光轴与目标视线间的误差角趋近于零.在制导过程中,该控制信号同时送入控制舵机,利用气动舵控制弹丸的飞行姿态从而实现弹丸的导引飞行,保证弹丸稳定跟踪目标.但是在比例导引的实现过程中还要考虑重力的影响,需要利用制导系统为弹丸提供重力补偿.2.2 “攻顶”技术的过程描述所谓的“攻顶”技术就是指在弹道的末制导段上给导引头引入重力补偿控制信号,使导引头产生附加进动,形成控制指令使弹丸以较大的落角攻击目标顶部的技术.该控制信号取自自动驾驶仪惯性陀螺产生的重力补偿信号,它给导引头施加一个附加力矩,驱使导引头的陀螺转子在铅垂平面内向下误进动,引起导引头产生反向调整的控制指令,与目标视线角速度形成的控制信号一起送入控制舵机完成比例导引.加入重力补偿信号之后其弹道特征为弹道在末制导段的前半段小幅上抬,后半段以较大的角度进行俯冲攻击,使弹丸的落角增大,实现“攻顶”[4].2.3 “攻顶”技术的理论实质由以上描述可知导引头测得的角速度信号包括两部分:一部分是目标视线角速度,一部分是重力补偿引起的附加进动角速度.测量值是这两个角速度的代数和.所以导引律(1)式应变为:σ·=k ·(q ·+w (t ))(2) 若令q ·g =q ·+w (t ),则式中q ·g 为导引头进动角速度,是测量值;q ·为目标视线角速度;w (t )为导引头附加进动角速度,本文仿真选取w (t )为一小值常量w g .考察弹丸的重力补偿情况可以发现,弹丸的惯导系统已经为弹丸提供了所需的重力补偿,而导引头附加进动角速度的产生相当于额外增加了一部分重力补偿值,故而重力补偿值比实际需要值大.而导引弹道的导引全过程又遵循比例导引,故可以称(2)式描述的导引律为过重力补偿比例导引律,w (t )视为过重力补偿信号.“攻顶”技术的理论实质即为过重力补偿比例导引的实践应用.3 弹道仿真的实现弹道仿真的实现分三个步骤[5]:建立弹道模型;建立仿真模型;改变参数,观察结果.(1)建立弹道模型d rd t=V T co sηT -V cos ηrd qd t=-V T sinηT +V sin ηq =ηT +σT q =η+σ(3) 由于假定弹丸处于理想控制状态,只研究其运动学特征,故选择弹丸和目标的相对运动方程(3)以及导引规律方程(2)为弹道模型.式(3)中各参数意义参见文献[3].(2)建立仿真模型根据方程(3),在Matlab 中建立仿真模型.(3)改变参数,观察结果改变各弹道参数,如初始弹道角、比例系数、弹丸目标速度比、过重力补偿值等,观察仿真结果,并进行相关分析.·27·战术导弹技术 TacticalM issile Technol ogy March,2008,(2)2012-05-18########################2012-05-18########################2012-05-18图2 c 变化时的弹道曲线图1 k 变化时的弹道曲线4 主要参数对弹道性能的影响本文主要分析了比例导引系数k 、弹丸与目标的速度比c 、过重力补偿值w g 等三个参数对弹道性能的影响.假定弹丸做等速飞行,目标做等速直线运动.4.1 比例导引系数k 对弹道性能的影响弹丸的末段速度相对较小,假定在200m /s 至400m /s 之间,而弹丸与目标的速度比c 较大,假定c =20.由图1可知:当k =1时末段弹道弯曲比较大,随着k 的增加,整个弹道的弯曲程度比较均匀,并且很明显制导初始段有一个小幅度上抬,后半段为俯冲弹道.通过分析可以得到以下结论:(1)弹道先上抬后俯冲的主要原因是由于引入了过重力补偿信号,导引头产生了附加进动角速度w g ,随着k 的增加,俯冲程度变大.(2)随着k 的增加,弹道初始段过载变大,弹末段过载趋近于某一常值.(3)弹道中间某点处将出现一个过载零点,这是因为视线角速度q ·是变化的,当q ·与w g 这两个角速度的代数和为零时,出现弹道过载零点,零点两侧过载方向相反.k 越大零点出现的时刻越早.4.2 弹丸与目标的速度比c 对弹道性能的影响由图2可以看出,弹丸与目标的速度比对弹道影响较大,c 越小弹道越弯曲;c 越大,弹道越光滑.c 对弹道的影响主要表现在:(1)c >15,弹道的弯曲程度变得均匀,表现为过载变化幅值不大;c <5,弹道初始段上抬程度变大,末段俯冲程度也变大,表现为弹道过载的急剧变化,例如图2中c =1.5时的情况.(2)c 越大,导引飞行的时间越短,如c =30时,t =10.5s ;c 越小,导引飞行的时间越长,如c=1.5时,t =31s .4.3 过重力补偿值w g 对弹道性能的影响过重力补偿值w g 为一小量,并且具有角速度的物理意义,所以在选取时取w g 为0(°)/s ~5(°)/s ,w g =0时即为重力补偿等于实际重力,其他即为过重力补偿的情况.由图3可以得出如下结论:(1)w g 越小,弹道越平直;w g 越大,弹道越弯曲,弹道的上抬和俯冲越明显,对目标的“攻顶”效果越好.(2)w g ≤2(°)/s ,弹道过载较小,当w g =0时,弹道末段过载趋于0;w g >2(°)/s ,弹道过载变大,弹道中间有过载零点.5 结 论通过以上分析和仿真计算可知,比例导引系数k,弹丸和目标的速度比c 以及过重力补偿值w g 是影响弹道性能的三个主要参数.因此在导引律的实·37·战术导弹技术 TacticalM issile Technol ogy March,2008,(2)2012-05-18########################2012-05-18########################2012-05-18图3 w g 变化时的弹道曲线现和设计弹丸的制导控制系统时,需要注意以下几个方面:(1)弹上的制导系统参数的选择要考虑其对弹道的综合影响,例如k 增大使得弹道中段和末段过载变化均匀,但加大了初始过载值;w g 的增大使得“攻顶”效果显著同时加大了全弹道上的过载.(2)由于弹丸末制导段速度变化不大,故c 对弹道性能的影响反应了弹丸对目标运动状态的选择和要求.因此在设计制导控制系统时要考虑其对目标的适用范围. (3)本文的计算主要基于k 和w g 在全弹道上为定量,但是制导控制系统的自适应和智能化的发展要求实现最优控制,故可以进一步改进导引律,使比例导引系数k 和过重力补偿值w g 随着弹道需求的变化而变化.(4)过重力补偿比例导引和传统比例导引一样过分依靠目标视线角速度q ·这一个观测量来控制,而在目标机动性加大或者出现测量误差时,难以实现精确控制而导致脱靶,因此可以发展新的比例导引律,使其能基于更多的观测量实现精确制导.[参 考 文 献][1] 雷虎民,刘兴堂,陈新海.比例导引的指令加速度[J ].电光与控制,1999(1):19~24.[2] 陈宏,雷鸣.激光寻的制导导引头技术[J ].光电子技术,2002,27(1):53~57.[3] 钱杏芳,张鸿端,林端雄.导弹飞行力学[M ].北京工业学院出版社.1987,12.[4] 翁彦,张天桥.激光半主动寻的制导在滚转导弹上的应用[J ].弹箭与制导学报,2002(1).[5] 张中南,童幼堂,张卫峰.比例导引法导引弹道仿真研究[J ].战术导弹技术,2005(2):56~59.(上接第48页)5.2 复合打击战法研究的内容对复合目标进行打击时,哪种型号的弹先打,哪种型号的弹后打,其总体毁伤效果是不一样的.复合式打法研究的内容还包括:导弹武器组合优化分析,即根据目标类型特性、战斗部毁伤效应和毁伤指标,科学组合各类型导弹对目标实施最有效的打击,以获取最大的军事效益;武器打击顺序研究,即根据目标价值、作战部队目前状态,结合作战任务,确定最佳的武器打击顺序;此外还包括多型号武器打击组合效应研究、耗弹量分析与优化及最佳复合打击方案的确定等.[参 考 文 献][1] 戴开政,王志平.伊拉克战争述评[M ].桂林:桂林陆军学院图书馆,2003.[2] 杨世荣.目标分析[M ].第二炮兵工程学院,2002,6:67.[3] 李新其等.美军在近期几场实战中目标选择的特点及对二炮的启示.二炮军事学术,2005(1):69~71.[4] 刘怡昕等.论对复合目标的复合式打法及其射击效率.射击学报,2004(2):4~6.[5] 章克凌,汪新红,张伟.精确制导武器对阵地工程损伤评估研究现状.科技研究,2002(5):4~6.·47·战术导弹技术 TacticalM issile Technol ogy March,2008,(2)2012-05-18########################2012-05-18########################2012-05-18file:///C|/Users/Administrator/Desktop/新建文本文档.txt通信/电子电脑、 杂志、 会议、 劳动合同、 生活休闲、 考试、 股票。

课程设计说明书重力补偿技术在XX型空地导弹上的设计与实现院系航空航天工程学部(院)专业班号学号姓名指导教师沈阳航空航天大学2014年1月摘要本文以小型空地导弹为背景,研究了导弹飞行末段控制原理。
分析了某小型空地导弹能实现对目标“攻顶”的技术及其理论实质,即重力补偿比例导引律的应用,在给定初始条件下,考虑重力因素,以导弹和目标的相对运动方程为基础,通过Matlab仿真计算的方法,分析了重力补偿值对导弹外弹道的影响。
结果表明,某型号空地导弹末段采用比例导引加重力补偿控制方式,将改善导弹跟踪性,满足“攻顶”这一战术指标,验证了重力补偿技术的可行性,证明了导弹飞行末段控制方式的合理性。
关键词:空地导弹,重力补偿,攻顶,弹道仿真,比例导引法。
目录第1章引言 (1)1.1 研究背景 (1)1.2导弹特征 (2)1.3 研究方法 (2)第2章弹道末段制导分析 (3)2.1 比例导引在末段制导的实现 (3)2.2 攻顶技术过程描述及理论实质 (3)第3章弹道末段控制分析 (5)3.1一对鸭舵作用力 (5)3.2导弹末段控制原理 (6)第4章弹道仿真的实现及结果 (7)4.1建立弹道模型 (7)4.2建立仿真模型 (7)4.3改变参数,观察结果 (7)结论 (9)参考文献 (10)附录 (11)1 带重力补偿的程序 (11)2 不带重力补偿的程序 (14)第1章引言1.1 研究背景在1991年的海湾战争中,美军向世界展示的精确打击能力让人印象深刻。
对地轰炸从传统意义上的低精度、大面积、地毯式的轰炸转变成为高精度,定点清除式的打击方式。
由于只打击高价值目标,使得轰炸效率提高,成本降低,战术效果显著。
因此,世界各国都在大力加强精确打击能力。
而随着各国部队从机械化向数字化转变,指挥节点也由从前的固定掩体式向战车移动式转变。
而战车的机动性和防护性的特性又对小型空地导弹及制导炮弹提出了新的要求。
其中针对战车一般顶部装甲薄弱的特点,则要求导弹要有“攻顶”的能力,因此重力补偿技术应运而生。

远程制导炮弹有控段弹道优化设计
郑友胜;杨剑影;汤蒂莲;周海迎
【期刊名称】《弹箭与制导学报》
【年(卷),期】2010(030)006
【摘要】文中对某远程制导炮弹进行弹道优化设计,为了能够很好的控制炮弹飞行,将有控段分成滑翔段、增速段和过重补偿段进行研究.根据制导炮弹滑翔段的特点,建立了制导炮弹的弹道模型,然后根据所建立的模型,给出了一种基于滑翔段的弹道优化算法.该算法避免了繁杂的梯度计算,相对于序列二次规划法其计算量大大降低了.仿真结果表明,所设计的弹道方案不仅增大了弹丸的射程,也提高了弹丸的命中概率.
【总页数】4页(P155-158)
【作者】郑友胜;杨剑影;汤蒂莲;周海迎
【作者单位】北京大学,北京,100871;洪都航空工业集团,南昌,330024;北京大学,北京,100871;东华理工大学土木与环境工程学院,江西抚州,344000;东华理工大学长江学院,南昌,330013
【正文语种】中文
【中图分类】TJ012.3
【相关文献】
1.目标丢失对末制导炮弹末导段弹道特性影响 [J], 赵成旺;宋卫东;任旭
2.防空制导炮弹有控弹道动态稳定性分析 [J], 常思江;王中原;刘铁铮
3.转速对低旋制导炮弹有控弹道的影响分析 [J], 蒲元;王武;刘立武
4.制导炮弹滑翔弹道优化设计方法研究 [J], 史金光;王中原;孙洪辉;竹建东
5.超远程制导炮弹滑翔增程弹道仿真研究 [J], 符蓓蓓;雷娟棉;王冬梅
因版权原因,仅展示原文概要,查看原文内容请购买。
基于预测落点导引律的制导炸弹中制导律设计杨俊;钱宇【期刊名称】《计算机仿真》【年(卷),期】2011(28)8【摘要】关于炸弹精确制导优化控制问题,是根据精确制导炸弹的飞行特点,要求精确打击目标.为了修正运动中的偏差,设计了制导炸弹的中制导规律,以实现对目标的精确打击的控制系统,提出了以预测落点作为反馈控制量的预测落点导引律,将制导炸弹有效导引向目标的任务,且保证落点脱靶量小.为提高制导律性能,进一步设计了比例微分积分形式的修正预测落点导引律,并进行了六自由度仿真及打靶试验.仿真结果表明,修正预测落点导引律生成的制导参数变化平稳、分布合理,可使制导炸弹保持很好的弹道性能,从而保证对目标实施精确打击,为精确制导设计提供了依据.%With the flight characteristics of the precision guided bomb, the midcourse guidance law is studied in the paper to precision striking against the targets. In this paper, a guidance law based on the impact point predication is developed, which is successful guiding the bomb to the target with small miss distance. To improve the law's per-formance, another impact point predication guidance law (IPPGL) with PID feedback is designed. The 6 - DOF mo-tion model and simulation using Monte Carlo method are simulated. The results show that guidance command form the IPPCL is changed rather slowly and reasonable.【总页数】4页(P87-89,206)【作者】杨俊;钱宇【作者单位】中国民航飞行学院,四川广汉618307;中国民航飞行学院,四川广汉618307【正文语种】中文【中图分类】V324.1【相关文献】1.基于遗传算法的卫星制导炸弹次最优制导律设计 [J], 窦磊;杨新民2.基于落点预测的火箭弹变系数末制导律 [J], 薄学纲;韩晶;焦国太;张艳军3.基于有限时间控制的制导炸弹模糊滑模制导律设计 [J], 刘婷婷;翟江涛;戴跃伟4.基于单神经元的卫星制导炸弹次最优制导律设计 [J], 窦磊;杨新民5.基于预测碰撞点带落角约束的导引律设计 [J], 史绍琨; 赵久奋; 尤浩因版权原因,仅展示原文概要,查看原文内容请购买。
基于制导炮弹的过重力补偿比例导引律优化设计王家祥1,杨新民1,王伟2,董鑫鹏1(1.南京理工大学瞬态物理国家重点实验室,南京 210094; 2.淮海工业集团第三研究所,山西长治 047100 )作者简介:王家祥(1990—),男,硕士研究生,主要从事制导炮弹的导引律研究。
本文引用格式:王家祥,杨新民,王伟,等.基于制导炮弹的过重力补偿比例导引律优化设计[J].兵器装备工程学报,2017(7):67-70.Citation:format:WANG Jiaxiang, YANG Xinmin, WANG Wei,et al.Optimization Design of Proportional Navigation Guidance Law with Gravity over Compensation Based on Guided Projectile[J].Journal of Ordnance Equipment Engineering,2017(7):67-70.摘要:针对工程实际中,制导炮弹的舵翼尺寸一般较小,可用过载较小,受重力影响较大,导引律参数选取较为繁琐的现状,推导出一类过重力补偿比例导引律的形式,并证明其需用过载的取值范围的可确定性;摒弃了前人采用经验尝试选取导引律参数的方法,将导引律参数选取问题,转化为一类最优化问题,并使用杂交粒子群算法进行了求解。
利用优化设计所得到的导引律与计及重力补偿的导引律,进行了六自由度全弹道仿真,并对比分析。
仿真结果表明,其过载显著降低,在有效增加弹着角的情况下,能准确命中目标。
关键词:制导炮弹;可用过载;过重力补偿比例导引律;杂交粒子群算法导引律是飞行器制导控制系统的关键技术之一,是决定能否准确命中目标的关键。
制导弹箭的舵翼尺寸一般较小,提供的升力有限,调控能力不足,因此在制导律设计过程中,需用过载应尽量小,有利于制导精度的提高。
本文仿真研究所使用的制导炮弹为采用PGK[1]技术的使用固定鸭舵的120mm迫击炮弹,下文中统称PGK。
PGK是一种典型的无动力弹,且舵翼为次口径舵翼,对于无动力弹的制导控制方式,已经有人研究。
何颖、杨新民[2]针对一类卫星制导炮弹进行导引律设计,进行了仿真分析。
窦磊[3]对卫星制导炸弹的导引律展开了一定程度的研究,采用较为严谨的数学推导,得出较为有效的一类最优制导律。
朱大林[4]对于一类双旋弹,针对双旋制导炮弹建立了七自由度数学模型,分析了弹道跟踪制导和修正比例导航制导两种方法的原理,进行了蒙特卡洛打靶仿真。
常思江[5]以一类鸭舵控制的防空制导炮弹为对象,对弹道预测导引法和修正比例导引法进行了研究分析。
国外学者Fresconi[6]同样做了类似的工作。
也有学者[7,8]对重力补偿的比例导引律及过重力补偿的比例导引律进行了弹道仿真。
为此,对于低过载、计算量较小、参数选取有依据的导引律的研究具有较强的现实意义与应用前景。
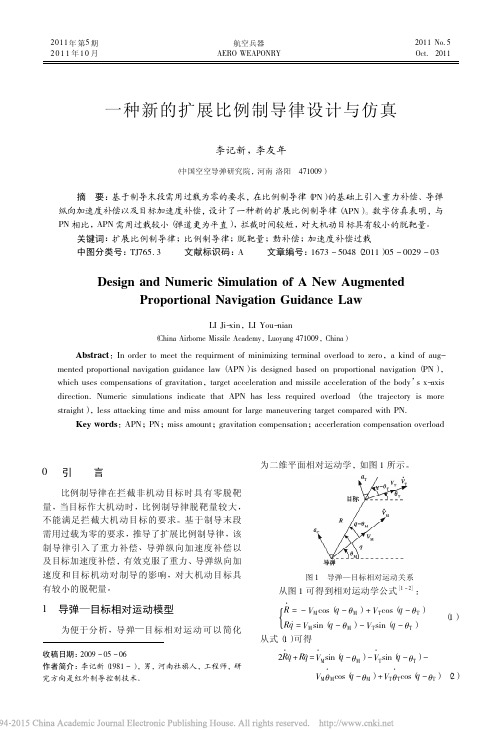
1 PGK运动方程与导引律推导1.1 运动方程的建立如图1所示,设制导弹与目标在同一铅垂面内运动。
图中:r为制导弹相对目标的距离;q为视目线与基准线之间的夹角,也习惯称为目标视线角;θ为制导弹速度矢量与基准线之间的夹角,在铅垂平面内,也即弹道倾角;θT为目标航迹角;η,ηT分别为制导弹速度矢量、目标速度矢量与视目线之间的夹角,也称为前置角。
设制导弹的攻击目标为固定地面目标,则制导弹与目标相对运动的极坐标方程可以描述如下(1)图1 弹目相对运动方程1.2 过重力补偿比例导引律由于制导弹的舵翼尺寸一般较小,受重力影响较大,其弹道曲线为大弯曲弹道,可用过载要求苛刻,普通的比例导引律,其需用过载量将会超过可用过载,导致脱靶。
本文基于过重力补偿比例导引律,做出进一步推导,得出一类适用于制导弹的导引律。
设导引关系式为(2)其中:A=KV/g;n c为待修正的项。
铅垂平面的法向过载为(3)通过式(1)、式(2)、式(3)式可求得[9]g cos(θ-q)n c+g cosθcos(θ-q)]·(4)其中一般称为有效导航比末制导时取值变化不大,q,θ的取值较为接近,可忽略项。
设补偿项n c=C+cosθ,其中cosθ即为抵消重力在弹道法向上影响的补偿项,因C取正值时,n c起到的补偿作用超过重力的影响,则C一般称为过重力补偿项。
该导引律一般称为过重力补偿比例导引律,联立式(2)、式(4)可得导引过载指令式为[cosθ-C](5)由式(5)可以看出过载取值受多个变量取值的影响。
当C=0时,即为典型的比例导引弹道,末制导段的制导炮弹,其过载正负最大值分别在命中点处与启动控制点取得,分别为cosθ与此两处的需用过载值一般较大,难以满足可用过载要求。
当取值C为一合适正常值时,命中点与启动控制点的过载值分别取值为cosθ-2C/(N-2)与考虑制导弹末制导时,一般有且显然可以降低端点需用过载值。
另外可以在数学上证明:当末制导段制导弹的弹道倾角的取值θ随时间递减,即有且过重力补偿值取值合适,并忽略制导弹的速度变化引起的过载变化时,制导弹的需用过载最大值与最小值,为端点值。
忽略制导弹末制导段速度的变化,设取值均为常数,且3≤N≤6,末制导段时则式(5)对时间求导有(6)令f (t)为等号右第一项,g(t)为等号右第二项。
则,当K1≥0时,有f (t)≤0, g(t)<0,则需用过载值n为单调递减函数,最大值与最小值在端点处取得。
当K1<0时,有f (t)>0, g(t)<0。
此时存在两种情况:当f (t)+g(t)=0成立时,情况较为复杂,不再引申证明,其需用过载最大值点可能存在于函数中段;当等式条件不成立时,因t→T,有f (t)→0+,则有f (t)+g(t)<0,此时需用过载值n亦为单调递减函数,最大值点与最小值在端点处取得。
综上,在上述假设条件下,C使得K1≥0的全部取值,与K1≤0的部分取值,可以使需用过载最大值与最小值为设计的端点值,证毕。
由上述证明可知,K1的取值比较重要,其取值本质由K,C决定,不考虑速度引起过载变化时,由K,C取值便可设计需用过载最大值为设计端点值的导引律,这可以极大简化运算,便于工程使用。
由上述分析,提出改进导引律形式如下(7)参考文献:[2]的处理方法,将分解为控制分量和重力分量,即(8)其中为重力影响引起的弹道倾角变化率(9)联立式(7)、式(8)、式(9),并令c g=gC/(KV)得(10)其中:K为比例导引系数;c g为过重力补偿项,为常值;为控制系统提供的弹道倾角变化率。
因而问题可转化为求得参数K,c g的合适取值,以使得导引律满足需用过载最小。
2 导引律参数优化设计由上节可知,导引律的设计问题,可以转化为两变量取值的最优化问题,此类问题使用智能优化算法能够较好地解决。
其中杂交粒子群算法是一种较好的最优化计算方法。
2.1 杂交粒子群算法粒子群优化(particle swarm optimization,PSO)算法是由Eberhart博士和Kennedy 博士于1995年提出的一类基于群体智能的随机优化算法。
PSO算法的研究最早源于对鸟群觅食行为的观察,鸟群通过个体间的协作与竞争,实现复杂空间的搜索。
粒子群算法,易于实现,收敛速度较好,但是容易陷入局部最优,收敛精度不高,后期收敛速度较慢。
针对以上缺点,学者们提出了若干种方法提高其全局搜索能力,其中杂交粒子群算法(HPSO)是较为有效的一种方法。
该法借鉴了遗传算法的杂交概念原理,具有标准PSO的特点,提高了全局搜索能力,能在较少的代数范围内取得最优值[10]。
杂交粒子群算法的步骤简要介绍如下:1) 随机初始化种群各粒子的位置和速度;2) 对每个粒子计算适应度函数,得出个体极值和全局极值;3) 更新每个粒子位置和速度;4) 计算每个粒子适应度,更新适应度个体极值和全局极值。
5) 根据杂交概率选取指定数量的粒子放入杂交池内,池中的粒子随机两两杂交产生同样数目的子代粒子,子代的位置和速度计算公式如下(11)6) 若满足停止条件,搜索停止并输出结果,否则返回第三步继续搜索。
2.2 导引律优化设计数学模型过重力补偿比例导引律优化设计模型的建立,主要为以下过程:确定优化设计目标函数:根据以上算法过程及导引律机理,确定优化设计目标函数为需用过载值。
期望需用过载值尽可能较低,选择为优化目标设计函数。
确定优化设计变量:对于公式(7)所示的导引律,其优化设计变量为K,c g,此两处变量一旦确定,在弹道倾角、弹丸初速、目标位置确定的情况下,即可求解出唯一的弹道。
确定约束关系:对于比例导引系数K,其取值为3~6,过重力补偿项c g,由上节证明可知,不应超过启动控制时目标视线角速率,此处取值0~0.02。
由目标函数、优化设计变量和约束函数的确定,建立导引律优化设计数学模型为(12)其中为控制段弹道计算所得需用过载值的最大值。
式中:Z∈R,Z为向量,对应K,c g,约束域R为(13)约束域与优化设计变量,通过六自由度弹道运动方程、弹目相对运动方程、导引方程联系起来,共同构成导引律优化设计数学模型,采用杂交粒子群算法即可对其求解。
3 仿真验证在Matlab/Simulink环境下搭建系统六自由度模型[11]。
本论文仅讨论铅锤平面情况,在标准炮兵气象条件下,PGK初速V0=320 m/s,射角θ0=45°,在此初始条件下自由落点位置为7 103 m。
综合考虑PGK修正能力等限制条件,取目标点为固定目标,位置为7 200 m。
启动控制点设定为弹道倾角θ≤-30°时,在弹目距离小于50 m时终止控制。
对于杂交粒子群算法,选取粒子数目为20,迭代次数为20次;选取杂交算法中的杂交频率为0.8,杂交池的比例为0.2。
粒子学习因子为0.2,惯性权重为0.5。
进行仿真运算,结果如表1所示。
表1 参数优化结果根据得到的参数优化结果得出的导引律,与计及重力补偿比例导引律 [2]进行对比仿真。
其中计及重力补偿导引律如下(14)过重力补偿导引律中的参数取表1中的HPSO算法数据,进行仿真,得出结果如图2~图5所示。
图2 末制导段弹道曲线图3 末制导段弹道倾角随时间变化曲线由图2可知,所有导引律均可准确命中目标点。
计及重力补偿比例导引弹道较为平直。
经过优化设计的过重力补偿比例导引律弹道曲度稍大。
由图3可知,计及重力补偿的比例导引律,命中点弹着角小于过重力补偿的比例导引律命中点弹着角。
由图4从目标视线角速度曲线可以看出,计及重力补偿的比例导引律表现出了典型比例导引弹道特征,目标视线角速率逐渐收敛于零。
而过重力补偿的比例导引律则收敛于设定的值Kc g/(K-2)。
由图5过载时间曲线来看,计及重力补偿的比例导引需用过载取值由负转正,需用过载绝对最大值在命中点处取得,达到n=0.692 0;过重力补偿的比例导引律过载表现非常出色,远优于计及重力补偿的比例导引律。