正激变换器中同步整流驱动分析
- 格式:doc
- 大小:169.00 KB
- 文档页数:5
同步整流面面观:如何用对正激变换器?
1 引言
在电源技术飞速发展的今天,同步整流技术正在低电压、大电流输出的
dc/dc变换器中广泛应用。
在这样的情况下,某些损耗问题也暴露了出来。
例如,对采用1.5V、20A电源的笔记本电脑而言,恢复整流二极管的损耗已经
超过电源输出功率的50%,即使采用低压降的二极管,损耗也达输出功率的18%~40%。
因此,传统的二极管整流电路已成为提高低电压、大电流dc/dc
变换器效率的瓶颈。
由于mosfet不能像二极管那样自动截止反方向电流,因此同步整流器的驱
动是同步整流技术使用的一个关键。
驱动方式的选取不仅关系到变换器能否
正常工作,更决定了变换器性能。
按照驱动方法的不同,同步整流分为自驱
型和外驱型,两者的主要区别在于,自驱型同步整流管的驱动电压一般采用
的是变压器上或辅助绕组上的电压,而外驱型同步整流管的驱动电压是由外部同步整流驱动芯片产生的。
本文将分别讨论两种同步整流驱动的方法,并
阐述了同步整流中需要注意的问题。
由于正激变换器是最简单的隔离降压式dc/dc变换器,其输出端的lc滤波
器非常适合输出大电流,可有效抑制输出电压纹波。
所以,正激变换器成为
低电压大电流功率变换器的首选拓扑结构。
正激变换器必须采用磁复位电路,以确保变压器励磁磁通在每个开关周期开始时已经复位,常见的磁复位方法有:有源钳位、rcd钳位、绕组复位、谐振复位等,如图1所示。
基于有源钳位同步整流技术的正激变换器发布时间:2022-10-18T05:48:31.079Z 来源:《福光技术》2022年21期作者:冯杨1 朱明君2[导读] 为更好的实现节能减排,提高正激变换器的转换效率,提出了转换效率高、可靠性高的330KHz、50W输出正激变换器设计方案。
1.海军装备部驻西安地区军事代表局陕西西安 7100432. 中国航空工业集团公司西安飞行自动控制研究所陕西西安 710065摘要:为更好的实现节能减排,提高正激变换器的转换效率,提出了转换效率高、可靠性高的330KHz、50W输出正激变换器设计方案。
变换器以PWM控制芯片UCC2891为控制芯片,有源钳位为作为变压器磁复位技术,同步整流为副边整流技术,集成了过温保护、欠压保护等功能。
通过II型补偿电压反馈电路进行输出电压调节,对最后的样机进行带载测试,实验证明该样机的效率为93.6%,达到了预期的效果。
关键词:PWM控制;有源钳位;同步整流;电压反馈Forward Converter Based On Active Clamp Synchronous Rectification TechnologyAbstract:In order to achieve better energy conservation and emission reduction,and improve the conversion efficiency of the forward converter,a 330KHz,50W output forward converter design scheme with high conversion efficiency and high reliability is proposed. The converter uses PWM control chip UCC2891 as the control chip,active clamping as the magnetic reset technology of the transformer,and synchronous rectification as the secondary side rectification technology,integrating functions such as over temperature protection and under voltage protection. The output voltage is regulated by type II compensation voltage feedback circuit,and the final prototype is tested on load. The experiment shows that the efficiency of the prototype is 93.6%,and the expected effect is achieved.Key words:PWM control;Active Clamp;Synchronous rectification;V oltage feedback1 引言十四五规划中,国家强调了坚持创新驱动发展、塑造发展新优势、推动绿色发展等新发展理念。
同步整流专利面临问题1、同步整流MOS晶体管在栅极电荷未被及时泄放情况下可双向导通;2、由于MOSFET晶体管反向导通,滤波电容与滤波电感将谐振,使DC-DC变换器输出产生负压,对输入端的有极性电容和负载造成损伤,甚至使敏感负载发生逻辑错误。
3、死区时间的调整控制。
4、同步整流电路的缺点是,由于功率转换器的次级侧的接地切换操作所导致的切换损失以及电磁波干扰问题。
5、自驱动有源钳位正激变换器,其整流管和续流管在关断的时候,其栅极驱动电压是负值,这可能由于整流管和续流管的反向漏电流而产生额外的损耗,从而造成整体变换器效率的下降;另外整流管和续流管的驱动信号之间同样没有死区时间,整流管及续流管共同导通的现象依然没有解决。
6、因寄生效应而在晶体管开关上所产生的电压尖峰或高频振铃7、由于MOSFET开通后可以双向导电,区别于二极管,因此对电路的工作带来影响。
通常的电压模式的驱动方式由于不检测流过MOSFET的电流,因此,在电路中存在电流反向的可能,其驱动信号也是在电路中变压器、电感或者其他相关点得到的波形,会引起轻载条件下效率低下等其他问题。
8、传统的采用电流互感器的方式,其取样电流消耗的能量在电路中直接消耗,导致驱动电路效率低下。
在实际应用中,通常的电流互感器驱动方案需要每个MOSFET带一个电流互感器检测其电流,导致电路成本上升、体积变大。
9、通常自驱动电路采用一个次级辅助绕组来为同步整流管和续流管提供驱动电压,但是,此种驱动方式由于辅助绕组藕合漏感与MOS管的栅极结电容产生振荡,致使驱动波形上升沿和平顶部分振荡,导致驱动损耗增大。
10、在大电流条件下开关电源同步整流电路结构及连接方式存在的连接、散热困难和额外发热等问题。
11、一般用变压器的副边绕组直接驱动MOS管。
这时在占空比比较小的情况下,会出现续流的同步MOS管导通不足的问题。
负载电流会流过MOS管的体二极管,造成较大的损耗。
12、门极通过辅助MOS管Sa至零电位,而同步整流MOS管的门极导通电压一般比较低(2~3V),所以容易受到外界千扰,也会造成共态导通的问题。
同步整流以及电荷保持驱动技术1、为什么我们使用同步整流技术:目前,越来越多的IC芯片都需要低电压供电。
随着功率变换器输出电压的降低,整流损耗成为变换器的主要损耗。
为使变换器达到很高的效率,必须降低整流损耗。
原有整流电路使用肖特基二极管作为整流二极管,但是由于导通压降在低压输出时候相对较大,引起的损耗也是我们不能接受的。
于是我们采用低导通电阻的MOSFET 进行整流,这是提高变换器效率的一种有效途径。
实现这一功能的电路就叫做同步整流电路。
实现同步整流功能的MOSFET 称作同步整流管。
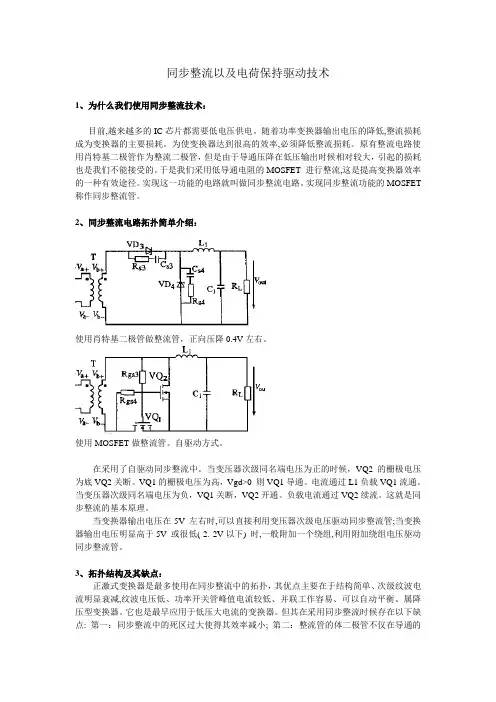
2、同步整流电路拓扑简单介绍:使用肖特基二极管做整流管,正向压降0.4V左右。
使用MOSFET做整流管。
自驱动方式。
在采用了自驱动同步整流中。
当变压器次级同名端电压为正的时候,VQ2的栅极电压为底VQ2关断。
VQ1的栅极电压为高,Vgd>0 则VQ1导通。
电流通过L1负载VQ1流通。
当变压器次级同名端电压为负,VQ1关断,VQ2开通。
负载电流通过VQ2续流。
这就是同步整流的基本原理。
当变换器输出电压在5V 左右时,可以直接利用变压器次级电压驱动同步整流管;当变换器输出电压明显高于5V 或很低( 2. 2V以下) 时,一般附加一个绕组,利用附加绕组电压驱动同步整流管。
3、拓扑结构及其缺点:正激式变换器是最多使用在同步整流中的拓扑,其优点主要在于结构简单、次级纹波电流明显衰减,纹波电压低、功率开关管峰值电流较低、并联工作容易、可以自动平衡、属降压型变换器。
它也是最早应用于低压大电流的变换器。
但其在采用同步整流时候存在以下缺点: 第一:同步整流中的死区过大使得其效率减小; 第二:整流管的体二极管不仅在导通的过程中增加了电路的损耗,而且在关断过程中,由于其反向恢复特征,也会引起能量损耗。
由于死区产生的体二极管导通损耗分析如下:在变压器电压保持为零的死区时间内,输出电流流经续流同步整流管VS2 ,但VS2栅极无驱动电压,所以输出电流必须流经VS2的体二极管。
同步整流技术已经成为现代开关电源技术的标志。
凡是高水平开关电源,必定有同步整流技术。
在使用面上早已不再局限于5V、3.3V、2.5V这些低输出电压领域,现在上至12V,15V,19V至24V以下输出,几乎都在使用同步整流技术。
下面介绍和分析各种同步整流技术的优点、缺点及实现方法。
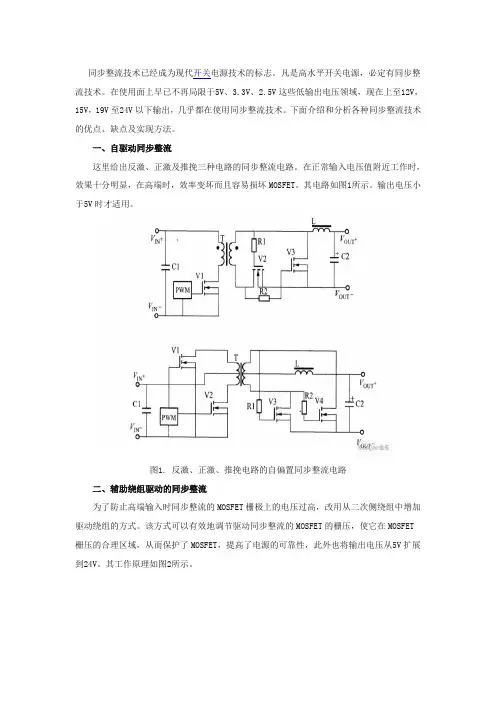
一、自驱动同步整流这里给出反激、正激及推挽三种电路的同步整流电路。
在正常输入电压值附近工作时,效果十分明显,在高端时,效率变坏而且容易损坏MOSFET。
其电路如图1所示。
输出电压小于5V时才适用。
图1. 反激、正激、推挽电路的自偏置同步整流电路二、辅助绕组驱动的同步整流为了防止高端输入时同步整流的MOSFET栅极上的电压过高,改用从二次侧绕组中增加驱动绕组的方式。
该方式可以有效地调节驱动同步整流的MOSFET的栅压,使它在MOSFET栅压的合理区域,从而保护了MOSFET,提高了电源的可靠性,此外也将输出电压从5V扩展到24V。
其工作原理如图2所示。
图2辅助绕组驱动的同步整流电路三、控制IC方式的同步整流为提高驱动同步整流MOSFET的效果,从而设计了各种模式的同步整流的控制驱动IC,也取得了不少成果,它将同步整流MOSFET的栅压调至最佳状态。
将其开启关断也提高了时控精度,其主要的不足在于MOSFET的源极必须接地,这会加大地线上的开关噪声,并传输至电源输出端。
此外其开关时序由自身输出脉冲给出,所以同步整流MOSFET的开启关断通常为硬开关,其时间会与初级侧主开关有些时间差,因此输出电压大体控制在20V以下,ST 公司推出的STSR2、STSR3,以及线性技术公司的LTC3900和LTC3901即是此种控制方式的代表作品。
图3和图4给出其应用电路图。
图3 STSR2,STSR3驱动同步整流的电路图4 LTC3900和LTC3901驱动的同步整流电路四、ZVS、ZCS同步整流该种方式诞生于2002年5月,在全桥或半桥电路中,PWM 输出的信号经信号变压器或高速光耦传递至二次侧,再经过RC网络积分后,经过MOSFET驱动器去驱动同步整流的MOSFET,驱动信号的脉冲宽度几乎不变,保持各50%的占空比,而当DC/DC系统输出电压稳压,一次脉宽调宽以后,二次侧同步整流MOSFET 即工作于ZVS、ZCS条件之下。
正激同步整流变换器分析摘要:同步整流技术的广泛应用促进了低电压大电流技术的发展,但是,使用同步整流技术会造成开关电源在轻载情况下的低效率问题。
以正激式同步整流变换器为例,从电感电流连续和断续两种状态,分析了轻载工况下的工作情况。
关键词:同步整流;CCM;DCM;环路电流;振铃O 引言随着计算机、通讯和网络技术的迅猛发展,低压大电流DC/DC变换器成为目前一个重要的研究课题。
传统的二极管或肖特基二极管整流方式,由于正向导通压降大,整流损耗成为变换器的主要损耗。
功率MOSFET导通电阻低、开关时间短、输入阻抗高,成为低压大电流功率变换器首选的整流器件。
根据MOSFET的控制特点,应运而生了同步整流(Synchronous rectification,SR)这一新型的整流技术。
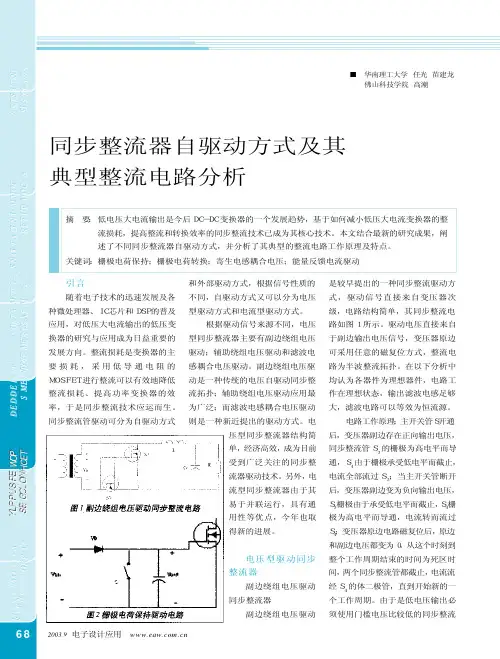
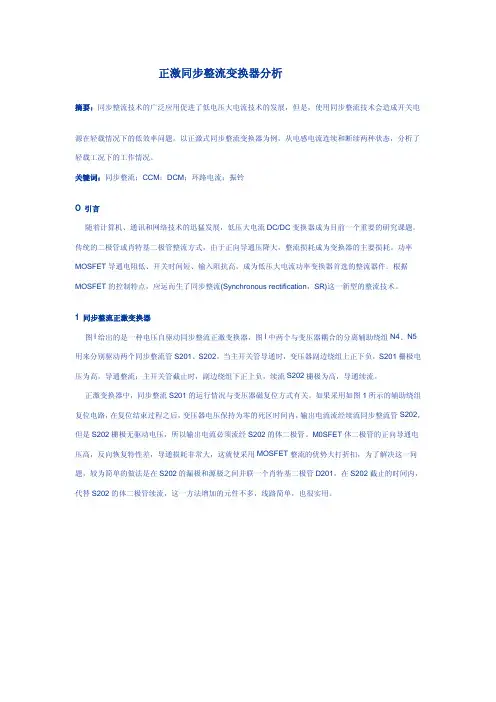
1 同步整流正激变换器图l给出的是一种电压自驱动同步整流正激变换器,图l中两个与变压器耦合的分离辅助绕组N4、N5用来分别驱动两个同步整流管S201、S202。
当主开关管导通时,变压器副边绕组上正下负,S201栅极电压为高,导通整流;主开关管截止时,副边绕组下正上负,续流S202栅极为高,导通续流。
正激变换器中,同步整流S201的运行情况与变压器磁复位方式有关。
如果采用如图1所示的辅助绕组复位电路,在复位结束过程之后,变压器电压保持为零的死区时间内,输出电流流经续流同步整流管S202,但是S202栅极无驱动电压,所以输出电流必须流经S202的体二极管。
M0SFET体二极管的正向导通电压高,反向恢复特性差,导通损耗非常大,这就使采用MOSFET整流的优势大打折扣,为了解决这一问题,较为简单的做法是在S202的漏极和源极之间并联一个肖特基二极管D201,在S202截止的时间内,代替S202的体二极管续流,这一方法增加的元件不多,线路简单,也很实用。
为了优化驱动波形,可以采用分离的辅助绕组来分别驱动两个同步整流管,比起传统的副边绕组直接驱动的同步整流变换器来说,这种驱动方式无工作电流通过驱动绕组,因此不需要建立输出电流的时间,MOSFET能够迅速开通,开通时的死区时间即体二极管导通的时间减少了一半。
同步整流电路分析 Revised by Chen Zhen in 2021同步整流电路分析一、传统二极管整流电路面临的问题近年来,电子技术的发展,使得电路的工作电压越来越低、电流越来越大。
低电压工作有利于降低电路的整体功率消耗,但也给电源设计提出了新的难题。
开关电源的损耗主要由3部分组成:功率开关管的损耗,高频变压器的损耗,输出端整流管的损耗。
在低电压、大电流输出的情况下,整流二极管的导通压降较高,输出端整流管的损耗尤为突出。
快恢复二极管(FRD)或超快恢复二极管(SRD)可达~,即使采用低压降的肖特基二极管(SBD),也会产生大约的压降,这就导致整流损耗增大,电源效率降低。
举例说明,目前笔记本电脑普遍采用甚至或的供电电压,所消耗的电流可达20A。
此时超快恢复二极管的整流损耗已接近甚至超过电源输出功率的50%。
即使采用肖特基二极管,整流管上的损耗也会达到(18%~40%)P O,占电源总损耗的60%以上。
因此,传统的二极管整流电路已无法满足实现低电压、大电流开关电源高效率及小体积的需要,成为制约DC/DC变换器提高效率的瓶颈。
二、同步整流的基本电路结构同步整流是采用通态电阻极低的专用功率MOSFET,来取代整流二极管以降低整流损耗的一项新技术。
它能大大提高DC/DC变换器的效率并且不存在由肖特基势垒电压而造成的死区电压。
功率MOSFET属于电压控制型器件,它在导通时的伏安特性呈线性关系。
用功率MOSFET做整流器时,要求栅极电压必须与被整流电压的相位保持同步才能完成整流功能,故称之为同步整流。
1、基本的变压器抽头方式双端自激、隔离式降压同步整流电路2、单端自激、隔离式降压同步整流电路图1 单端降压式同步整流器的基本原理图基本原理如图1所示,V1及V2为功率MOSFET,在次级电压的正半周,V1导通,V2关断,V1起整流作用;在次级电压的负半周,V1关断,V2导通,V2起到续流作用。
同步整流电路的功率损耗主要包括V1及V2的导通损耗及栅极驱动损耗。
「开关电源电路分析」双管正激同步整流直驱电路分析双管正激同步整流直驱电路分析双管正激变换器电路图如图1 所示。
双管正激变换器结构简单,由开关管VT1、VT2,二极管D1、D2;同步整流管SR1、SR2,变压器,电感L,电容C和负载R组成。
图1 双管正激直驱同步整流电路双管正激直驱同步整流主要波形图电路图双管正激同步整流变换器各点的波形和工作过程如图2 所示。
当双管正激变换器工作在电感电流连续导电模式时,在一个开关周期中,双管正激变换器可以分为三个工作过程。
(1) 第一阶段(t0~t1):在t0时刻,开关管VT1、VT2导通,流过的电流为次级折算到初级电流和励磁电流之和,即iN1=IO/n+im变压器原边绕组的电压为上正下负,D1、D2截止,每个二极管承受电压为Vi;与其耦合的副边绕组电压也为上正下负,且uN2=Vi/ n,SR1栅极电压为Vi/n,SR1导通;SR2的栅源电压Vds1为负值,(Vds1为SR1的导通压降,Vds1值很小可以近似为零)SR2关断,SR2漏源承受的电压为Vi/n。
电感电流线性上升,上升率为(Vi/n-VO)/L。
流过二极管SR1和L的电流相等,流过最大电流为Vo/(nRo,min)。
输入电能通过同步整流SR1传递给负载,同时将部分能量储存在输出回路中的储能电感L中,直到t1时刻,开关管VT1、VT2关断;(2) 第二阶段(t1~t2):t1时刻,VT1、VT2关断后,每个开关管两端所承受的电压为Vi。
原边绕组电压为上负下正,D1、D2导通,存储在漏感中的所有能量通过两个二极管D1、D2回馈给电源,流过D1、D2的电流为励磁电流。
副边绕组电压为上负下正,且uN2=-Vi/n,SR2栅源电压为Vi/ n,SR2导通,流过SR2和L的电流相等;SR1栅极电压为负,SR1关断,承受的反向电压为Vi/n。
此时,储能电感L将储存的磁能变为电能,通过同步续流管SR2继续向负载供电。
单端正激变换器中设计同步整流的内涵编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(单端正激变换器中设计同步整流的内涵)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为单端正激变换器中设计同步整流的内涵的全部内容。
单端正激变换器中设计同步整流的内含同步整流是改善DC/DC变换器效率的一个共用技术,特别对低压输出大电流输出,同步整流的控制在正激电路中可以有不同的方法,从自偏置到完整的控制技术,多数已有的控制技术都容许同步整流MOSFET的体二极管在短时间内传导电流,这样就会降低效率.本设计展望的焦点就是用一种新的控制技术,以消除体二极管参与同步整流,并从一个30W谐振复位正激变换器的实践完成本篇论文.Ⅰ 简介:正激变换器传统用于低输出电压的DC/DC变换器,亦即通讯用的输入电压范围36~75V。
选择这个拓扑的理由是只用单一初级开关,且开关接参考地,并且有几种变压器复位方法。
控制环的动态特性也好,可用扩展标准降压变换器的控制方法来很好地理解.虽然正激拓扑已经相当普及.但它还是有些局限,随着输出电压的减少,效率也就受到整流损耗的限制.整流损耗,实际上即整流器在输出负载电流时的正向压降损耗。
因为变换器占主导地位的损耗,产生在低压大电流输出应用时,虽然肖特基二极管技术有了很大改进,但还是同步整流才能提供更高的效率.功率MOSFET的制造已经由小型封装的低压器件的极低的导通电阻做了回答。
已有3mΩ导通电阻的MOSFET适应同步整流用。
这样如何控制好同步整流即是设计师的主要决定。
Ⅱ 用二极管整流的正激变换器A, 变压器复位选择在讨论同步整流之前,看看用二极管整流的正激变换器是有意义的,正激拓扑基本的功率级示于图1。
正激变换器中同步整流驱动分析摘要:对同步整流的概念进行了定义并按驱动方式将它分为自驱动同步整流和外驱动同步整流;然后对正激变换器中自驱动和外驱动同步整流的特性分别进行了比较分析,在自驱动部分重点分析了RCD 箝位和有源箝位2 种形式的同步整流正激变换器电路;并讨论了影响同步整流效率的因素及提高效率应采取的措施;最后通过实验得出结论,同步整流是低压、大电流电源中提高效率的有效方法。
关键词: 正激变换器; 同步整流; 自驱动; 外驱动计算机、通信交换机等数据处理设备在电路密度和处理器速度不断提高的同时,电源系统也向低压、大电流和更加高效、低耗、小型化方向发展。
如今IC 电压已经从5 V 降为3. 3 V 甚至1. 8 V ,今后还会更低。
在DC2DC 变换器中,整流部分的功耗占整个输出功率的比重不断增大,已成为制约整机效率提高的障碍。
传统整流电路一般采用功率二极管整流,由于二极管的通态压降较高,因此在低压、大电流时损耗很大。
这就使得同步整流技术得到了普遍关注并获得大量应用[1 ,2 ] 。
同步整流技术就是用低导通电阻MOSFET 代替传统的肖特基整流二极管,由于MOSFET 的正向压降很小,所以大大降低了整流部分损耗[2 ] 。
同时对MOSFET 给出开关时序随电路拓扑工作要求作相应变化的门极驱动信号。
由于门极驱动信号与MOSFET开关动作接近同步,所以称为同步整流(Synchronous Rectification ,简称SR) 。
1 正激变换器中的同步整流自驱动同步整流是指直接从变压器副边绕组或副边电路的某一点上获取电压驱动信号,来驱动同步整流管。
外驱动同步整流是指通过附加的逻辑和驱动电路,产生随主变压器副边电压作相应时序变化的驱动信号,驱动SR 管。
这种驱动方法能提供高质量的驱动波形,但需要一套复杂的驱动控制电路。
相比较来说,自驱动同步整流的电路结构简单,所需元件数量较少;同时自驱动同步整流续流二极管靠复位电压驱动,所以工作特性依赖于功率变压器的复位方式。
理想情况是变压器复位时间与主开关管关断时间相等,这样,输出电流将在整个关断期间内通过同步整流管续流[4 ] 。
由于漏源极间PN 结的存在,使MOSFET 漏源极之间存在一个集成的反向并联体二极管。
电路拓扑要求整流管有反向阻断功能,因此MOSFET 作为整流管使用时,流过电流的方向必须是从源极到漏极,而不是通常的从漏极到源极[4 ] 。
实际应用中,2 只SR 管的驱动信号之间应保证足够的死区时间。
因为在2 个SR 管换流期间,如果一只整流管已处于导通态,而另外一只还没有关断,就会造成短路,导致较大的短路电流,可能会烧毁MOS 管。
但死区时间也不能过长,因为在死区时间内,负载电流从SR 管的体二极管流过,完成MOSFET 作为整流管的功能,如果死区时间过长,电路虽然仍能正常工作,但会增加损耗。
因此,从减小损耗的角度考虑,死区时间应设置得足够小。
图1 RCD 箝位自驱动同步整流正激变换器1. 1 RCD 箝位自驱动同步整流正激变换器图1 为输出端采用自驱动同步整流的正激变换器电路。
同步整流管包括SR2 (Q2 和D2) 和SR3 (Q3 和D3) ,它们直接被变压器副边电压驱动,不需要专门的驱动器或控制电路来提供门极驱动信号。
这种自驱动电路是同步整流中较简单的形式,因为SR3 的门极驱动信号来自变压器磁芯复位电压,所以它的工作特性取决于变压器磁芯复位方式。
图2 RCD 箝位自驱动同步整流正激变换器波形图(a) 主开关管门极驱动信号(b) 主开关管漏源极电压(c) 流过同步整流管SR2 的电流(d) 流过同步整流管SR3 的电流图1 电路中原边主开关管的门极驱动信号、漏源极电压波形与副边SRs 管的电流波形分别如图2 所示。
从图2 (c) 波形中可以看出,在变压器磁芯复位结束时,变压器的磁化电流I2m 开始流过SR2 的体二极管D2 。
磁化电流I2m 的大小与变压器的匝比、复位电压和主开关管两端的总电容量的平方根三者的乘积成正比,与变压器磁化电感的平方根成反比。
其中从主开关管两端看过去的总电容量是主开关管输出电容、变压器绕组电容、箝位二极管跨接电容、SR3 的反射输入电容、SR2 的反射输出电容的总和。
同样,从图2 ( d) 波形中可以看出, 在变压器复位完成之后,原来SR3 的晶体管Q3 上流过的负载电流Io 减去磁化电流I2m 后换流到体二极管D3 。
由于SR2 和SR3 的体二极管的正向压降相对较高,所以体二极管的导通以及死区时间( Tdead) 的延续就降低了同步整流的效率。
减少这种损耗的方法是给SR2 与SR3 并联肖特基二极管或减少D2 和D3 的导通时间。
D2 的导通时间可以通过采用新的变压器复位方式使死区时间最小化来缩短;D3 的导通时间可以通过使用外部门极驱动信号驱动Q3 或采用其他复位方式使死区时间最小化来缩短。
由于负载电流Io 比磁化电流I2m 大很多,所以在死区时间内,由D3 导通造成的损耗比D2导通造成的损耗大很多。
例如,对于设计良好的变换器,在输出电流为15~20 A 时, I2m 通常小于2 A ,D2 的导通损耗对输出效率的影响相对来说较小。
SR2 和SR3 的体二极管的导通损耗也与换向时间Toncom和Toffcom有关,如图2 (c) 、图2 (d) 所示。
SR2 的体二极管D2 仅在死区期间和主开关管关断后一个极短的时间内导通。
当死区时间仅由变压器的复位电压决定时,主开关管关断后D2 的转换时间依赖于副边电压的跌落时间和输出电流从二极管D2 到晶体管Q3 的换向时间( Toffcom) 。
变压器副边电感决定换向时间Toffcom ,也决定主开关管开通后,从二极管D3 到晶体管Q2换流所需的换向时间( Toncom) 。
副边电感包括变压器的漏电感、SRs 的封装(寄生或杂散) 电感和副边交互电感。
与D3 在Toncom期间产生的导通损耗对SR3 总体损耗的影响相比,D2 在Toffcom期间产生的导通损耗对SR2的总体损耗的影响要大得多。
为了减少换向时间,副边的电感量应该尽量小,尤其要注意的是减小变压器的漏电感,这对于减少SRs 的门极驱动电压损失特别重要。
SRs 体二极管的导通,不仅增加导通损耗,而且也带来在体二极管关断期间,出现在另一个SR 的体二极管和晶体管之上的由于反向恢复引起的功率损耗。
反向恢复引起的功率损耗与恢复电荷Qrr 、频率和副边电压成比例,一般通过给SR2 和SR3 并联肖特基二极管来消除。
1. 2 有源箝位自驱动同步整流正激变换器图3 有源箝位自驱动同步整流正激变换器如图3 所示为有源箝位复位方式的自驱动正激变换器电路[5 ] 。
它的主要波形如图4 所示。
因为变压器磁芯在几乎整个主开关管关断期间被复位,所以这种复位方式将死区时间减至最小。
结果晶体管Q3 的导通时间被最大化,D2 传导磁化电流的时间被最小化。
因此相对于RCD 箝位方式,有源箝位复位方式变换器的转换效率有所提高。
同时,有源箝位复位方式减小了主开关管上的电压应力。
此外,适当调整变压器的磁化电感,可使主开图4 有源箝位自驱动同步整流正激变换器波形图(a) 主开关管门极驱动信号(b) 主开关管漏源极电压(c) 流过同步整流管SR2 的电流(d) 流过同步整流管SR3 的电流关管在零电压下开通。
与采用RCD 箝位方式的电路相比,有源箝位方式的缺点是需要一个额外的开关管和相应的驱动电路。
所以使用肖特基二极管与SR2 并联来提高RCD 箝位电路效率的方法应该比采用有源箝位方法更简单、经济。
而在需要着重考虑电压应力和软开关的同步整流应用中,有源箝位方法是一个不错的选择。
虽然自驱动同步整流易于实现,但驱动波形质量不如外驱动电路理想,而且不适于在输入电压变化范围较大的情况下使用。
对于在图1 和图3 中所示的自驱动同步整流,最大可接受的输入电压范围很大程度依赖于输出电压。
因为SR2 的门极驱动电压与输入电压成一定比例,所以输出电压越高, 可接受的输入电压范围就越窄。
同样,最小副边电压(如门极驱动电压) 依赖于所需的输出电压和最大占空比。
如果输入电压范围较宽并且输出电压相对较高( > 5 V) ,门极驱动电压在上限有可能超过(或接近) 最大允许门极驱动电压。
可以用一个单独的绕组给Q2 提供门极驱动信号来消除输出电压对门极驱动电压幅度的影响。
同样, 可以通过设置门源极间的电压箝位电路来限定最大门极驱动电压。
但是这些调整需要附加元件或一个多绕组的变压器,增加了自驱动方法的复杂性。
因此,自驱动SRs 比较适于在较窄的输入电压变化范围和较低输出电压的情况下使用。
1. 3 外驱动同步整流正激变换器外驱动同步整流正激变换器的电路如图5 所示,它的主要波形如图6 所示。
在电路中,晶体管Q2 和Q3 被从主开关管门极驱动获得的信号所驱动,因此,同步整流管的导通时间与变压器的复位方式无关,仅取决于门极驱动信号的时间。
从图6 (c) 、图6 (d) 可见,当从控制电路驱动同步整流管时,得到Q3 的最大导通时间,它不影响在死区期间通过二极管D2 的磁化电流的导通时间。
在死区时间内,晶体管Q2 是关闭的(对Q2 的门极驱动较低) ,对于外驱动的同步整流管,在死区时间内,二极管D2 的导通与自驱动完全相同。
在设置SRs 的理想门极驱动时间情况下,除了在死区时间内D2 不可避免导通以外,应该避免体二极管导通。
这就需要非常精确地安排门极驱动时间,即在施加/ 中止一个SR 的门极驱动信号的同时,中止/ 施加另一个SR 门极驱动信号。
但是,这种理想的互补驱动实际上是不可能实现的。
在意外情况下,短暂的门极驱动信号交叠将同时开通2 个SRs ,这会引起副边短路,造成副边电流增大,不仅会使效率降低,甚至会烧毁变换器。
为了避免在实际应用中SRs 同时导通,在2 个门极驱动信号之间一定要加入延迟。
但在延迟期间,因为没有门极驱动信号作用于SRs ,SRs 的体二极管导通,这就增加了导通损耗,而且带来反向恢复损耗。
因此,控制同步整流驱动的效果很大程度上依赖于门极驱动的时间安排。
2 结语讨论了正激变换器同步整流的驱动方法,分析了变压器复位机制对自驱动同步整流效果的影响,在一个输出3. 3 V/ 20 A 的正激变换器中,用同步整流取代传统的肖特基二极管整流,实验结果证明效率提高了1 %~2 %。
这说明,同步整流取代肖特基二极管整流对提高变换器效率的作用是明显的,但效率的提高是有限的,受到包括输出电压、输出电流、SRs 的通态阻抗、SRs 的正向压降等许多因素的限制。
只有把这些限制因素之间的相互作用分析清楚,选择正确的驱动控制方法,才能有效地提高同步整流的效率。