第章变频器提升机程序参数样表
- 格式:doc
- 大小:458.00 KB
- 文档页数:18
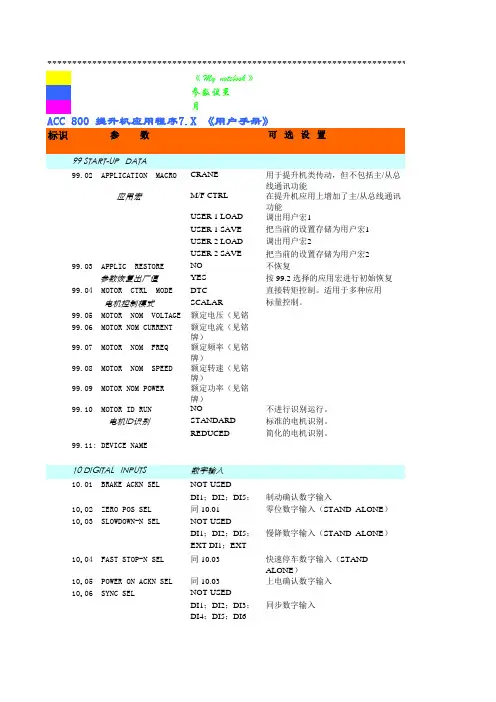
《 My notebook 》标题:ACC 800参数设置时间:2005年11月标识参 数99 START-UP DATA 99.02 APPLICATION MACROCRANE 用于提升机类传动,但不包括主/从总线通讯功能应用宏M/F CTRL 在提升机应用上增加了主/从总线通讯功能USER 1 LOAD 调出用户宏1USER 1 SAVE 把当前的设置存储为用户宏1USER 2 LOAD 调出用户宏2USER 2 SAVE 把当前的设置存储为用户宏299.03 APPLIC RESTORENO 不恢复参数恢复出厂值YES 按 99.2 选择的应用宏进行初始恢复99.04 MOTOR CTRL MODEDTC 直接转矩控制。
适用于多种应用电机控制模式SCALAR 标量控制。
99.05 MOTOR NOM VOLTAGE 额定电压(见铭牌)99.06 MOTOR NOM CURRENT 额定电流(见铭牌)99.07 MOTOR NOM FREQ 额定频率(见铭牌)99.08 MOTOR NOM SPEED 额定转速(见铭牌)99.09 MOTOR NOM POWER 额定功率(见铭牌)99.10 MOTOR ID RUNNO 不进行识别运行。
电机ID识别STANDARD 标准的电机识别。
REDUCED 简化的电机识别。
99.11: DEVICE NAME10 DIGITAL INPUTS 10.01 BRAKE ACKN SEL NOT USEDDI1;DI2;DI5;DI6制动确认数字输入10.02 ZERO POS SEL同 10.01零位数字输入(STAND ALONE )10.03 SLOWDOWN-N SELNOT USEDDI1;DI2;DI5;DI6慢降数字输入(STAND ALONE )EXT DI1;EXT DI2;EXT DI3;EXT DI410.04 FAST STOP-N SEL 同 10.03快速停车数字输入(STAND ALONE )10.05 POWER ON ACKN SEL 同 10.03上电确认数字输入10.06 SYNC SEL NOT USEDDI1;DI2;DI3;DI4;DI5;DI6同步数字输入EXT DI1;EXT DI2;EXT DI3;EXT DI410.07 CHOPPER FLT-N SEL 同 10.06斩波器故障数字输入10.08 STEP REF2 SEL 同 10.03分段给定2数字输入(STAND ALONE )10.09 STEP REF3 SEL 同 10.03分段给定3数字输入(STAND ALONE )10.10 STEP REF4 SEL 同 10.03分段给定4数字输入(STAND ALONE )10.11 HIGH SPEED SEL 同 10.03高速数字输入(STAND ALONE )10.12 SNAG LOAD-N SELNOT USED 异常负载数字输入数字输入**************************************************************************ACC 800 提升机应用程序7.X 《用户手册》可 选 设 置DI1;DI2;DI3;DI4;DI5;DI610.13 ACCELERATE SEL 同 10.03加速数字输入(STAND ALONE )10.14: FB STOPLIM SEL 10.15: ELSHAFT ON SEL 10.16: FAULT RESET SEL 10.17: USER MACRO CH SRC 10.18: EXTERNAL FAULT13 ANALOGUE INPUTS 13.01 SCALE AI10 -----4.000AI1 的换算因子13.02 FILTER AI10S-----4.00S AI1 的滤波时间常数13.03 SCALE AI20 -----4.000AI2 的换算因子13.04 FILTER AI20S-----4.00S AI2 的滤波时间常数13.05 SCALE EXT AI10 -----4.000EXT AI1(NAIO-02)的换算因子13.06 FILTER EXT AI10S-----4.00SEXT AI1(NAIO-02)的换算因子13.07: AI1 0% REF LEV [V]14 RELAY OUTPUTS 14.01 RELAY RO1 OUIPUTNOT USED 继电器输出1内容READY ACC 600处于准备运行状态RUNNING ACC 600启动,速度和转矩调节器工作FAULT 有故障发生FAULT-N当上电时继电器得电,发生故障时释放CONTROL LOC 控制站BRAKE LIFT 用于控制机械制动的信号WATCHDOG-N 正常指示,用于提升机传动的急停信号USER 1 OR 2指示使用了用户宏1或2REVERSE 指示电机反向运行OVERSPEED 电机超速跳闸的故障信号RDY FOR RUN 指示电机已励磁(ON ),等待启动命令14.02 RELAY R02 OUTPUT 见14.0114.03 RELAY R03 OUTPUT 见14.0114.04 EXT1 D01 OUTPUT 见14.01#1 NDIO ,DO1内容14.05 EXT1 D02 OUTPUT 见14.01#1 NDIO ,DO2内容14.06 EXT2 D01 OUTPUT 见14.01#2 NDIO ,DO1内容14.07 EXT2 D02 OUTPUT见14.01#2 NDIO ,DO2内容15 ANALOGUE OUTPUTS 15.Ol ANALOGUE OUTPUT 1NOT USED 模拟输出1内容MEAS SPEED 测量的(NTAC 模块)电机转速SPEED电机速度。
提升机配置及参数型号说明:(2)J K Z双筒卷扬机类矿井提升机凿井专用配置:一、2JK-3.5(75.435吨)主轴装置:卷筒为活滚筒,活刹车盘,便于运输调绳部分为径向齿块调绳,装配形式为洛矿新型标准,主轴转动为滚动轴承。
减速器:为100型行星减速机。
盘形制动器:仿瑞典后置式制动器。
电动机:选用1WV/6KV两用,上海电机厂产(外购)电控:高压部分为1WV/6KV两用,控制部分为我公司研发编程双PLC免维护高性能电控。
其余附件:按洛矿图纸。
发货总量按洛矿发货清单发货。
二、2JKZ-3(72.2吨)主轴装置:本主轴装置为凿井专用提升机,卷筒容绳宽度为1.8m(一个),相对普通提升机,卷筒筒皮加厚,主轴加粗加长,联轴器与3.5米提升机选用同型号,其装配方式为洛矿新型转配方式,主轴转动为滚动轴承。
减速器:选用ZHLR-170(Ⅲ)式XP-80行星减速机。
盘形制动器:仿瑞典后置式(三对头四台)电动机:选用1WV/6KV两用,上海电机厂产(外购)电控:高压部分1WV/6KV两用,控制部分为我公司研发编程双PLC免维护高性能电控。
其余附件:洛矿图纸发货总量按洛矿发货清单发货。
三、JKZ-2.8(51.78吨)主轴装置:本主轴装置为凿井专用提升机,容绳宽度为2.2单筒,联轴器与3.5米提升机选用同型号,其装配方式为洛矿新型装配方式,主轴转动为滚动轴承。
减速器:选用相配套的行星减速机。
盘形制动器:彷瑞典后置式(三对头四台)电动机:选用1WV/6KV两用,上海电机厂产(外购)电控:高压部分为1WV/6KV两用,控制部分为我公司研发编程双PLC免维护高性能电控。
其余附件:按洛矿图纸发货总量按洛矿发货清单发货。
四、JK-2.5 (37.3吨)主轴装置:卷筒为或卷筒可拆开,便于运输,装配方式为洛矿新型装配方式,主轴转动为滚动轴承。
减速器:选用相配套的行星减速器。
盘形制动器:仿瑞典后置式制动器。
电动机:选用1WV/6KV两用,上海电机厂产(外购)电控:高压部分为1WV/6KV两用,控制部分为我公司研发编程双PLC免维护高性能电控。
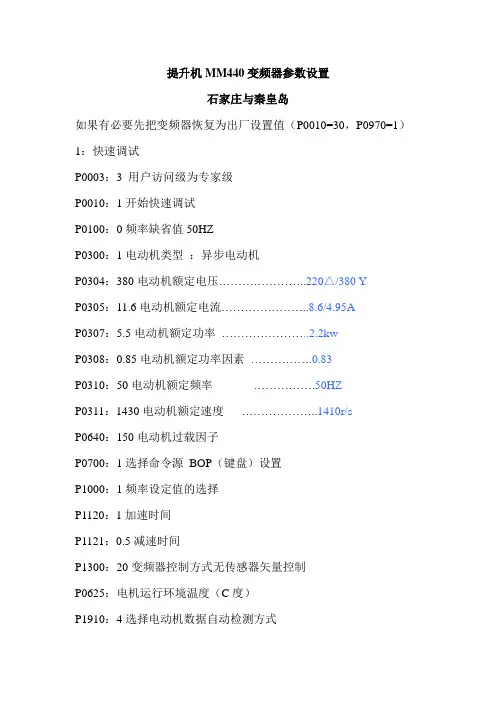
提升机MM440变频器参数设置石家庄与秦皇岛如果有必要先把变频器恢复为出厂设置值(P0010=30,P0970=1)1:快速调试P0003:3 用户访问级为专家级P0010:1开始快速调试P0100:0频率缺省值50HZP0300:1电动机类型:异步电动机P0304:380电动机额定电压…………………..220△/380 YP0305:11.6电动机额定电流…………………..8.6/4.95AP0307:5.5电动机额定功率…………………..2.2kwP0308:0.85电动机额定功率因素…………….0.83P0310:50电动机额定频率…………….50HZP0311:1430电动机额定速度………………..1410r/sP0640:150电动机过载因子P0700:1选择命令源BOP(键盘)设置P1000:1频率设定值的选择P1120:1加速时间P1121:0.5减速时间P1300:20变频器控制方式无传感器矢量控制P0625:电机运行环境温度(C度)P1910:4选择电动机数据自动检测方式P3900:3结束快速调试,进行电动机计算提升机的具体参数P0640:50电动机过载因子P0700:2选择命令源由端子排输入P0701:16固定频率设定值(直接选择+ON命令)P0702:16固定频率设定值(直接选择+ON命令)P0703:16固定频率设定值(直接选择+ON命令)P0704:15固定频率设定值(直接选择)P0705:15固定频率设定值(直接选择)P0731:52.3 变频器故障由变频器制动端子决定731/732为52.C P0732:52.C电动机抱闸(MHB)投入P1000:3频率设定值的选择固定频率P1001:40固定频率(DIN1)由端子排输入下的频率设置P1002:20固定频率(DIN2)P1003:10固定频率(DIN3)P1120:1斜坡上升时间加速时间P1121:0.5—0.7斜坡下降时间减速时间P1215:1抱闸制动使能使能电动机抱闸制动P1216:1.0抱闸制动释放的延迟时间P1217:0.8斜坡曲线结束后的抱闸时间P1237:2动力制动的工作/停止周期20%P1240:2直流电压控制器的配置(0禁止直流电压控制器,1最大直流电压控制器使能,2最小直流电压控制器使能,3最大和最小直流电压控制器使能)P1254:0 Vdc(直流电压)接通电平的自动检测P1310:150连续提升P1311:150加速度提升P1312:150起动提升P1496:0.1加速度预控的标定P1610:150连续转矩提升P1611:150加速度转矩提升P1755:2电动机模型(SLVC)的起始频率1040:面板控制下的频率输出P1910:3、1P1960:1。
JK-2.5×2P 型矿井提升机技术配置书一、执行标准1)《煤矿安全规程》(2016版)。
2)《金属非金属地下矿山安全规程》(G B16424-1996)。
3)《矿井提升机和矿用提升绞车安全要求》(G B20181-2006)4)《煤矿地面多绳摩擦式提升系统设计规范》(M T5021-1997)。
5)《直流传动矿井提升机电控设备第二部分晶闸管电控设备》(JB/T6754.2-93)6)《工业过程测量和控制装置的电磁兼容性》(G B/T13926-92)7)《低压配电设计规范》(G B50054-95)8)《电气设备的抗干扰特性基本测量方法》(G B4859-84)。
9)(89)中煤总生机字第128号文件规定的各项保护及后备保护功能。
10)现行国家电工委员会及其它标准。
11)进口电气设备遵守国际电工委员会 IEC 标准。
12)《3-110K V高压配电装置设计规范》(G B50060-92)。
13)《电力装置的继电保护和自动装置的设计规范》(G B50062-92)。
14)《矿用一般型电气设备》(G B12173-90)。
15)《外壳防护等级的分类》(G B4208-84)。
16)《电能质量公用电网谐波》(GB/T14549-1993)17)《煤矿用单绳缠绕式矿井提升机安全检验规范》(A Q1035-2007)18)《单绳缠绕式矿井提升机》(G B20961-2007)19)《单绳缠绕式矿井提升机》( Q/HBSHM003-2013 )1二、使用条件井筒长度:m进筒倾角:三、机械部分1、JK-2.5×2P 技术参数表序号项目参数备注1提升机型号JK-2.5×2P2减速器型号JC1200双排齿速比31.5740r/min 3电机型号YTS400S2-8功率315KW4卷筒直径2500mm宽度2000mm个数15容绳量一层490m二层986m三层1438m6速度 3.0m/s7钢丝绳直径30mm8最大静张力83KN2提升机计算公式:1、卷筒一层多少米计算公式:卷筒直径 × 3.14 = 钢丝绳一周多长卷筒宽度 ÷钢丝绳直径 = 卷筒一层少圈卷筒一层圈数 ×钢丝绳一周数 = 一层多少米2、提升速度计算公式:电机转速 ÷减速比 ×卷筒的周长 ÷ 60 秒=速度3、提升机提升重量计算公式:0.95 ×电机功率 ÷电机转数 ×减速比 ÷卷筒半径 ÷坡度系数=提升量2、技术要求1)主轴装置卷筒采用有限元法优化设计为厚壳薄支结构,锻打45#钢板焊接成型;卷筒在承载后产生的变形能迅速扩散,应力变形不集中,有效地提高了卷筒的承载能力及抗疲劳强度。
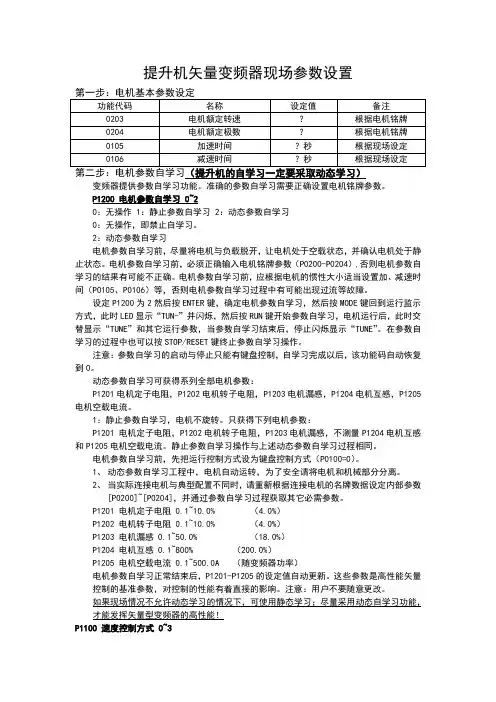
提升机矢量变频器现场参数设置第二步:电机参数自学习(提升机的自学习一定要采取动态学习)变频器提供参数自学习功能。
准确的参数自学习需要正确设置电机铭牌参数。
P1200 电机参数自学习 0~20:无操作 1:静止参数自学习 2:动态参数自学习0:无操作,即禁止自学习。
2:动态参数自学习电机参数自学习前,尽量将电机与负载脱开,让电机处于空载状态,并确认电机处于静止状态。
电机参数自学习前,必须正确输入电机铭牌参数(P0200-P0204),否则电机参数自学习的结果有可能不正确。
电机参数自学习前,应根据电机的惯性大小适当设置加、减速时间(P0105、P0106)等,否则电机参数自学习过程中有可能出现过流等故障。
设定P1200为2然后按ENTER键,确定电机参数自学习,然后按MODE键回到运行监示方式,此时LED显示“TUN-”并闪烁,然后按RUN键开始参数自学习,电机运行后,此时交替显示“TUNE”和其它运行参数,当参数自学习结束后,停止闪烁显示“TUNE”。
在参数自学习的过程中也可以按STOP/RESET键终止参数自学习操作。
注意:参数自学习的启动与停止只能有键盘控制,自学习完成以后,该功能码自动恢复到0。
动态参数自学习可获得系列全部电机参数:P1201电机定子电阻,P1202电机转子电阻,P1203电机漏感,P1204电机互感,P1205电机空载电流。
1:静止参数自学习,电机不旋转。
只获得下列电机参数:P1201 电机定子电阻,P1202电机转子电阻,P1203电机漏感,不测量P1204电机互感和P1205电机空载电流。
静止参数自学习操作与上述动态参数自学习过程相同。
电机参数自学习前,先把运行控制方式设为键盘控制方式(P0100=0)。
1、动态参数自学习工程中,电机自动运转,为了安全请将电机和机械部分分离。
2、当实际连接电机与典型配置不同时,请重新根据连接电机的名牌数据设定内部参数[P0200]~[P0204],并通过参数自学习过程获取其它必需参数。

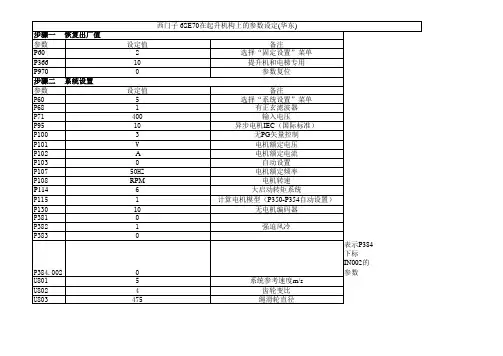
第8章abbacs800变频器(提升机程序参数样表)第8章ACS800变频器提升机软件参数设定表以上是ABB ACS800变频器“提升程序”包含的用户参数,还有些参数是属于ABB 人员通过设定相应的密码才可看到。
对于用户参数来说,只能看到1-99组参数。
其中1-9组参数是实际参数。
我们可以通过1-9组参数,来监视变频器的状态。
其中10-99组参数是需要设定的参数,并不是所有的参数都需要设置和改变,而是需要我们根据实际情况进行相关的参数设定,并且应设定合适正确的参数,如果没有正确的设置参数,有可能导致变频器的损坏。
正确熟练的使用“控制盘”或“DriveWindow”软件将有助于我们快速设置参数。
针对ABB ACS800提升变频器来说,如何更好的理解变频器参数的含义呢我认为应该结合电机的三要素(启动/停止;方向;调速),结合变频器的特点(我认为先了解每个参数组都是干啥的,然后再具体了解这一组参数里每个参数的意思),具体来说,按照顺序掌握如下内容(下面这些参数组都是常用的。
)首要知道一点,无论是ABB标准变频器还是ABB提升变频器,从硬件的角度都是一样的,只是内置的系统软件不一样。
ABB标准变频器内置的是“标准程序”,它可以满足大多数的应用。
ABB提升变频器内置的是“提升机程序”,只针对于起重机的应用。
正因为如此,提升变频器的参数组区别于标准变频器的参数组。
下面来了解下提升变频器的参数组以及参数。
提升变频器都有哪些参数组呢(1)首先第99组参数,这一组参数是所有参数的总纲,它决定了其它参数的默认值。
这一组参数主要有四个方面的要素:应用宏程序、控制方式、电机铭牌数据、电机优化方式。
在这里面,控制方式、电机铭牌参数和电机优化方式和标准的一样;唯独“应用宏程序”和标准不一样。
只有两个“CRANE 和M/F CTRL”。
CRANE 宏包含除主/从总线功能以外的所有的ACC800 应用软件功能。
M/F CTRL 宏包含所有的CRANE 宏的功能,并增加了主/从总线功能(第72组参数)。
变频器参数设置大全!(建议收藏)要知道变频器的参数如何设置,首先要明白变频器是什么东西,用它来做些什么活儿。
变频器是用来调整异步电机转速的一种电源装置,根据转速n=60f/p(1-s)这个公式,变频器本质是输出频率可调的电压源,通过改变电源频率来改变电机转速,而频率改变的同时,为了避免磁通饱和导致电机过热,还要跟着改变电压,也就是保持V/F 比值恒定,所以变频器的参数设置,都是围绕这个核心来进行的。
变频器的设定参数较多,每个参数均有一定的选择范围,使用中常常遇到因个别参数设置不当,导致变频器不能正常工作的现象,因此,必须对相关的参数进行正确的设定。
一控制方式即速度控制、转距控制、PID控制或其他方式。
采取控制方式后,一般要根据控制精度进行静态或动态辨识。
二最低运行频率即电机运行的最小转速,电机在低转速下运行时,其散热性能很差,电机长时间运行在低转速下,会导致电机烧毁。
而且低速时,其电缆中的电流也会增大,也会导致电缆发热。
三最高运行频率一般的变频器最大频率到60Hz,有的甚至到400Hz,高频率将使电机高速运转,这对普通电机来说,其轴承不能长时间的超额定转速运行,电机的转子是否能承受这样的离心力。
四载波频率载波频率设置的越高其高次谐波分量越大,这和电缆的长度,电机发热,电缆发热变频器发热等因素是密切相关的。
五电机参数变频器在参数中设定电机的功率、电流、电压、转速、最大频率,这些参数可以从电机铭牌中直接得到。
6、跳频:在某个频率点上,有可能会发生共振现象,特别在整个装置比较高时;在控制压缩机时,要避免压缩机的喘振点。
变频器两台或多台同步控制参数设置方法:1第一步准备变频器两台、导线两根、电源一个。
2第二步变频器接线,将两个变频器分别定义为主机和从机,主机485A端口接入从机485A端口中,主机485B端口接入从机485B端口中。
如果有第三台,可将第三台的485A和485B一样接入到主机的485A与485B端口中,如有更多以此类推。
通用变频器调试步骤和参数设置快速调试当选择P0010=1〔快速调试〕时,P0003〔用户访问级〕用来选择要访问的参数。
这一参数也可以用来选择由用户定义的进展快速调试的参数表。
在快速调试的所有步骤都已完成以后,应设定P3900=1,以便进展必要的电动机数据的计算,并将其它所有的参数〔不包括P0010=1〕恢复到它们的缺省设置值。
一、快速调试步骤和参数设置二、功能调试1、开关量输入功能2、开关量输出功能可以将变频器当前的状态以开关量的形式用继电器输出,通过输出继电器的状态来监控变频器的部状态3、模拟量输入功能MM440变频器有两路模拟量输入,相关参数以in000和in001区分,可以通过P0756分别设置每个通道属1电压信号2~10V作为频率给定,需要设置:以模拟量通道2电流信号4~20mA作为频率给定,需要设置:注意:对于电流输入,必须将相应通道的拨码开关拨至ON的位置。
4、模拟量输出功能MM440变频器有两路模拟量输出,相关参数以in000和in001区分,出厂值为0~20mA输出,可以标定为4~20mA输出〔P0778=4〕,如果需要电压信号可以在相应端子并联一支500Ω电阻。
需要输出的物理量5、加减速时间加速、减速时间也称作斜坡时间,分别指电机从静止状态加速到最高频率所需要的时间,和从最高频率6、频率限制7、多段速功能多段速功能,也称作固定频率,就是设置参数P1000=3的条件下,用开关量端子选择固定频率的组合,实现电机多段速度运行。
可通过如下三种方法实现: 1〕直接选择〔P0701~ P0706 = 15〕在这种操作方式下,数字量输入既选择固定频率〔见上表〕,又具备起动功能。
3〕二进制编码选择+ON命令〔P0701~P0704 = 17〕8、停车和制动9、闭环PID控制MM4变频器的闭环控制,是应用PID控制,使控制系统的被控量迅速而准确地接近目标值的一种控制手段。
实时地将传感器反应回来的信号与被控量的目标信号相比拟,如果有偏差,如此通过PID的控制作用,使偏差为0,适用于压力控制,温度控制,流量控制等。
ATV71施耐德变频器操作说明一、图形显示终端按钮功能介绍1,图形显示器;2,功能键F1,F2,F3,F4;3,STOP/RESET(停车/复位)按钮;4,RUN(运行)按钮;5,导航按钮;• 按(ENT): - 保存当前值; 1234657- 进入所选菜单或参数;• 转动CW/CCW:- 增大或减小一个值;- 转到下一行或前一行;- 增大或减小给定值,如果通过终端控制功能被激活;6,用于使电机旋转反向的按钮;7,ESC 按钮:中断一个值、一个参数或一个菜单,返回以前的选择。
※注意:如果通过终端控制功能被激活按钮3、4、5 与6 可用于直接控制变频器。
二、图形显示屏描述1,显示行。
在出厂设置模式下显示:变频器状态:如图中RDY;有效控制通道:如图中Term;频率给定值:如图中+0.00Hz;电机内电流:如图中0A。
2,菜单行。
显示当前菜单或子菜单的名称。
3,菜单、子菜单、参数、值、柱状图等在下拉菜单窗口显示,每个窗口最多显示5行。
导航按钮所选的行或值反白显示。
4,显示分配给键F1至F4的功能,与这四个键上下对应,例如:功能键是动态的,且具有前后关系。
功能键可通过【1.6命令】给这些键分配其他功能。
5,6,二〇一二年九月七日星期五三、变频器状态代码四、设置窗口示例第3 页/共10页五、第一次通电-设置语言和访问等级设置为Chinese。
二〇一二年九月七日星期五第5 页/共10页六、以后通电屏幕显示如下二〇一二年九月七日星期五七、访问参数示例:访问加速斜坡八、变频器菜单的操作方法已经设置过参数的变频器上电时,首先显示变频器的型号,3秒钟以后自动转到【变频器菜单】。
若操作者没有进行操作,10秒后自己转入【DISPLAY显示】,显示内容将根据相关参数设置而改变。
通过按导航按钮或ESC键,用户可以进入【主菜单】。
旋转导航按钮选择【变频器菜单】、【访问等级】、【打开/另存为】、【密码】、【语言】等菜单。
一般来说,我们只需要按导航按钮进入【变频器菜单】即可,其余几种很少用。
功能参数一览表(1)代码参数名称功能说明设定范围出厂值00主频率输入设定主频率入来源选择0000:主频率输入由操作面板控制0000 0001:主频率输入由模拟信号输入(0~+10V)+(4~20mA)0002:主频率输入由RS-485通讯界面控制01运转指令来源运转信号来源选择0000:运转指令由操作面板控制0000 0001:运转指令由外部端子控制键盘STOP键有效0002:运转指令由外部端子控制键盘STOP键有效0003:运转指令由RS-485串联通讯界面控制键盘STOP键无效0004:运转指令由RS-485串联通讯界面控制键盘STOP键无效02电机停机方式设定电机停机方式选择0000:以减速制动方式停止00000001:以自由运转方式停止03V/F曲线设定最高操作频率选择~04基频~05基压~06中间频率选择~07中间电压选择~08最低输出频率选择~09启动电压~10加减速时间设定第一加速时间选择~11第一减速速时间选择~12第二加速时间选择~13第二减速速时间选择~14点动加减速时间选择点动加减时间选择~15S-曲线设定S曲线缓加减速选择0~7016多段速运转设定第一段频率选择~17第二段频率选择~18第三段频率选择~19第lh 段频率选择~20第五段频率选择~功能参数一览表(2)代码参数名称功能说明设定范围出厂值21第六段频率选择~22第七段频率选择~23点动频率设定点动频率设定~24反转禁止设定反转禁止功能设定0000:0000 0001:25过电压失速防止功能设定过电压失速防止功能选择0000:00010001:26过电流失速防止功能设定加速中,过电流检出准位50~200%170%27转矩中,过电流检出准位50~200%170%28直流制动功能设定直流制动电流准位设定0~100%0%29启动时直流制动时间设定~30停止时直流制动时间设定~31停止时直流制动制动~32瞬间停电再启动功能设定瞬间停电运转选择0000:瞬间停电后,不继续运转00000001:瞬间停电后,继续运转变频器由停电前速度往下追踪0002:瞬间停电后,继续运转变频器由最小起始速度上追踪33允许停电之最大时间~34复电后追踪之时间~35速度追踪之最大电流设定30~200%150%36输出频率限制设定输出频率上限选择~37输出频率下限选择~38外部运转指令选择二线式/三线式运转控制0000:正转/停止,反转/停止00000001:反转/正转,运转/停止0002:三线式运转控制一0003:三线式运转控制二39多功能输入端子功能设定多功能输入选择一0000:多段指令一000040多功能输入选择二0001:多段指令二0001 41多功能输入选择三0002:多段指令三000242多功能输入选择四0003:点动频率指令0013 0004:加减速禁止指令0005:第一、第二加减速时间切换0006:外部中断,常开接点(NO)输入0007:外部中断,常闭接点(NC)输入0008:上频率指令(Up)功能参数一览表(3)代码参数名称功能说明设定范围出厂值0009:下频率指令(Down)0010:计数器清零0011:正转点动指令0012:反转点动指令0013:外部故障常开接点(NO)输入0014:外部故障常闭接点(NC)输入0015:外部中断,不再启动(NO)输入0016:外部中断,不再启动(NC)输入0017:参数锁定0018:强制运转指令面板给定0019:强制运转指令面板给定0020:无功能43数字频率计数字输出频率倍数设定1~201 44类比输出增益设定类比输出增益设定1~200%100%45多功能输出端子设定多功能输出端子一(MO1)0000:运转中指示000046多功能输出端子二(MO2)0001:设定频率到达指示00010002:任意频率到达指示0003:计数到达指示0004:非零速0005:过转矩指示0006:外部中断指示0007:低电压检出指示0008:变频器超做操作模式0009:故障指示47任意到达频率设定任意到达频率设定~48模拟输入/频率指令曲线设定最高频率模拟设定~49最低频率模拟设定~50模拟输出频率/ 电流信号设定模拟信号输出选择0000:类比频率计(0到最高操作频率)00000001:(0到250%额定电流)51保留52电机运转资料设定电机额定电流设定30~120%100%53电机空载电流设定0~99%40%54转矩补偿设定自动转矩补偿设定0~10% 3%55转差补偿设定自动转矩补偿增益~56保留功能参数一览表(4)代码参数名称功能说明设定范围出厂值57多功能输出接点设定多功能输出接点指示常开接点(A-B) 常闭接点(B-C)0000:故障指示00000001:运转中指示0002:设定频率到达指示0003:任意频率到达指示0004:非零速0005:过转矩指示0006:外部中断指示58电子热续电器指示电子热续电器选择0000:以标准电动机动作00020001:以特殊电机动作0002:不动作59电子人继电器动作时间30~300S6060过转矩检出功能选择过转矩检出功能选择0000:过转矩不检测00000001:定速运转中过转矩检测,过转矩检出(E013)停止运转0002:定速运转中过矩检测,过转矩检出后(E013)继续运转0003:运转中过转矩检测,过转矩检出后(E013)停止运转0004:运转中过转矩检测,过转矩检出后(E013)继续运转61过转矩检出准位30~200%150% 62过转矩检出时间选择~63计数值到达功能设定指定计数值设定1~9999166计数值到达设定1~9999164功能显示项目设定输出物理项目设定0000:显示实际运转频率(P)00000001:显示使用者定义输出物理量(n)0002:显示内部计数器(r)0003:显示输入电压值(u)0004:保留0005:保留0006:保留65比例常数设定比例常数设定~67跳跃频率设定跳跃频率一~68跳跃频率二~69跳跃频率三~70跳跃频率宽度设定~功能参数一览表(5)代码参数名称功能说明设定范围出厂值71PWM频率设定载波频率选择0001:fc=3kHz, 0002:fc=6kHz 0003:fc=9KHz0004:fc=12KHz 0005:fc=15KHz.随规格而设定72故障后,自动重置/启动次数设定0~10073故障记录检查最近第一次故障记录0000:无故障记录(清除故障记录)000074最近第二次故障记录0001:过电流000075最近第三次故障记录0002:过电压00000003:过热0004:过负载0005:过负载10006:外部故障0007:CPU故障10008:CPU故障30009:控制器保护线路故障0010:加速中电流值超过额定电流值二倍0011:减速中电流值超过额定电流值二倍0012:恒速中电流值超过额定电流值二倍0013:接地保护或保险丝熔断0014:保留0015:保留0016:保留0017:外部中断允许0018:过负载20019:保留0020:保留760000:所有的参数值设定为可读/写模式0000 0001:所有的参数设定为仅读模式0002~0009:不使用0010:所有的参数设定为出厂值770000:1200 baud (数据传输速率位元/秒)0002 0001:2400 baud (数据传输速率位元/秒)0002:4800 baud (数据传输速率位元/秒)780000~00300000 790000 80仅可读取**##。
第9章起重专用软件(+N652)简介●起重设备电气控制系统●起重机对电气传动的要求●调速---一般起重机的调速性能是较差的,当需要准确停车时,司机只能采取“点车”的操纵方法,如果“点车”次数很多,不但增加了司机的劳动强度,而且由于电器接电次数和电动机起动次数增加,而使电器、电动机工作年限大为缩短,事故增多,维修量增大。
有的起重机需要准确停车,则必须采用调速方法。
●一般采用电气调速方法:●直流调速:机组/晶闸管整流交流调速:变频调速/变极调速/变转差率调速●起重设备电气控制系统●平稳或快速起制动;●纠偏与电气同步;●机构间的动作协调,比如各机构与电磁铁的配合控制;●起升机构防止“溜钩”;●安全保护:手柄零位保护;●欠压保护●过载和短路;●限位保护;●紧急断电保护;●安全门开关联锁保护;超载保护。
●启/停平稳●变频器控制的启动/制动电流、启动/停车时间可设置,因而大大降低对电网和设备的冲击;传统的接触器-继电器控制系统,电动机的正/反转频繁切换、操作人员为了快速“稳钩”常常快速采用频繁打“反接制动”等对电网、机械设备冲击很大,控制电器(尤其是接触器)的寿命大大缩短,需要经常维护和更换,也影响设备的使用效率;●调速●满足起重工艺要求;提高工作效率---重载时可达到电动机额定速度;轻载时可以让电动机工作电动机额定速度以上工作,提高工作效率。
●提高制动闸的使用寿命和系统安全性变频器控制的各机构,可以在电动机速度降至很低(“零速”)时投入制动闸,避免了传统的接触器-继电器控制系统停车时高速时投入“制动闸”,大大减轻了对制动闸的冲击,从而提高了制动闸的可靠性和使用寿命!从而提高了系统的安全性!●快速起制动采用变频器控制时,电动机在低速情况下可以达到满转矩,保证了起制动的快速性;●纠偏与电气同步成为可能多电动机同时工作,比如大车机构、多主钩/副钩同时工作等情况,常常需要负荷均衡分布,有时需要速度甚至位置同步,这在传统的接触器-继电器系统中往往因为下述原因难以实现:电动机本身的分散性、机械设备的精度比如减速比不可能完全一致、轨道的平整度等等。
第8章ACS800变频器提升机软件参数设定表以上是ABB ACS800变频器“提升程序”包含的用户参数,还有些参数是属于ABB 人员通过设定相应的密码才可看到。
对于用户参数来说,只能看到1-99组参数。
其中1-9组参数是实际参数。
我们可以通过1-9组参数,来监视变频器的状态。
其中10-99组参数是需要设定的参数,并不是所有的参数都需要设置和改变,而是需要我们根据实际情况进行相关的参数设定,并且应设定合适正确的参数,如果没有正确的设置参数,有可能导致变频器的损坏。
正确熟练的使用“控制盘”或“DriveWindow”软件将有助于我们快速设置参数。
针对ABB ACS800提升变频器来说,如何更好的理解变频器参数的含义呢我认为应该结合电机的三要素(启动/停止;方向;调速),结合变频器的特点(我认为先了解每个参数组都是干啥的,然后再具体了解这一组参数里每个参数的意思),具体来说,按照顺序掌握如下内容(下面这些参数组都是常用的。
)首要知道一点,无论是ABB标准变频器还是ABB提升变频器,从硬件的角度都是一样的,只是内置的系统软件不一样。
ABB标准变频器内置的是“标准程序”,它可以满足大多数的应用。
ABB提升变频器内置的是“提升机程序”,只针对于起重机的应用。
正因为如此,提升变频器的参数组区别于标准变频器的参数组。
下面来了解下提升变频器的参数组以及参数。
提升变频器都有哪些参数组呢(1)首先第99组参数,这一组参数是所有参数的总纲,它决定了其它参数的默认值。
这一组参数主要有四个方面的要素:应用宏程序、控制方式、电机铭牌数据、电机优化方式。
在这里面,控制方式、电机铭牌参数和电机优化方式和标准的一样;唯独“应用宏程序”和标准不一样。
只有两个“CRANE 和M/F CTRL”。
CRANE 宏包含除主/从总线功能以外的所有的ACC800 应用软件功能。
M/F CTRL 宏包含所有的CRANE 宏的功能,并增加了主/从总线功能(第72组参数)。
注意:应用宏一改变所有参数设置都将恢复为默认值,除了组99 的参数和存储的电机ID Run 数据外。
因此在进行参数设定前应先选择合适的应用宏,通过选择。
(2)第98组参数:激活可选件模块。
(比如编码器模块、PROFIBUS-DP通讯模块或扩展I/O模块等),有点类似于PLC的硬件组态。
(3)我们先了解“第64组参数CRANE”,为什么呢ABB标准变频器有本地控制和外部控制之说,对于ABB提升变频器也是如此。
对于ABB提升变频器来说,本地控制就是控制盘,当然处于“LOCAL”下;外部控制指的是“端子控制”和“Field Bus 通讯控制”。
在这里,端子控制称为“Stand alone 模式”。
我们通过功能框图了解下本地控制和外部控制。
(在提升机手册第50页)此图在提升机手册第50页。
从这个图中,我们可以对本地控制和外部控制有清楚的认识。
从图中,我们可以看出“提升机功能”,此模块的输入信号:DI1-DI6,EXT DI1-4;AI1、AI2、EXT AI1 (速度修正)。
输出是SPEED REF(速度给定)、TORQUE REF(转矩给定)、ON/START(励磁投入/启动命令)。
A 通过来选择“Stand alone 模式”或“Field Bus 通讯控制方式”。
B 当=YES时,起作用。
即“Stand alone 模式”下,又分为“JOYSTICK”、“RADIO CTRL”、“MOTOR POT”、“STEP JOYST”、“STEP RADIO”、“STEP RADIO”、“FB JOYSTICK”、“BIPOLAR REF”7种控制类型,根据实际情况,来选择正确的控制类型。
下面对每个控制类型作个详细的描述。
操作杆模式(JOYSTICK):当Zero Pos=0,Start Dir A =1,变频器正向启动;当Zero Pos=0,Start Dir B =1,变频器反向启动;遥控模式(RADIO CTRL):电动电位器控制模式(MOTOR POT):分级式操作杆给定模式(STEP JOYST)当分级式操作杆的给定触点用作代替模拟电位器时,应使用STEP JOYST控制模式(参数。
支持多达4 种不同的速度级,由方向命令给出的第一级速度触点+给出三个另外速度级别的触点。
触点可连接到需所选的DI 上(包括I/O 扩展模块),参见参数 STEP REF2 SEL, REF3 SEL 和 STEP REF4 SEL。
相应的速度给定由参数 SPEED REF LEVEL 1 到 SPEED REF LEVEL 4 来设定。
只有较低级的分级触点全部闭合,更高一级的才能被激活。
例:当对应的分级给定4 级的闭合触点闭合时,第2、3 级的触点必须闭合。
注意:在该模式下,需要来自控制杆的零点位置信号,这与JOYSTICK 控制相似。
此时操作杆监测功能也有效。
分级式遥控给定模式(STEP RADIO)当使用带有分级式给定输出触点的遥控器或PLC 时,可使用控制模式STEP RADIO (参数。
最多可有 4 种不同速度等级。
数字输入及速度给定值可参考上述分级式操作杆模式。
本控制模式不需要零点位置输入信号。
且控制杆监测功能无效。
FB JOYSTICK控制模式(FB JOYSTICK)(3)第10组参数:和以上操作模式相关的数字量输入。
(4)第13组参数:模拟量输入,对应于速度给定,转矩给定等。
(5)第14组参数:对应于主控板上的3个继电器输出(DO1、DO2、DO3)。
(6)第15组参数:对应于模拟量输出通道(AO1、AO2 )。
以上四组参数,针对不同的控制类型,相关的参数值也是不一样的。
(7)第16组参数:称之为系统输入参数。
(不需要改变)(8)第20组参数:对电机运行的速度、电流、转矩进行限幅。
(9)第21组参数:确定电机的启动方式。
设置=CNST DC MAGN(不能改变),=500ms(预励磁时间)。
这里只说明了电机的启动方式,那么电机的停止方式是怎么样的呢:给定的最大速度rpm(100%)。
:正向加速时间,从0到最大速度;:正向减速时间,从最大速度到0;:反向加速时间,从0到最大速度;:反向减速时间,从最大速度到0。
=0s时,结合上述参数,按“直线”加减速;不等于0s时,结合上述参数,按“S曲线”加减速。
这里又出现个问题:当正向命令或反向命令取消后,电机应该会减速停车。
为了下次能更快的启动,虽然速度为0,但一直给电机励磁。
我们通过设置第65组参数,来实现此功能。
(13)在电机优化完后,会生成新的PID参数。
注意:电机优化的参数不一定适合负载,为什么呢因为优化电机的时候,是将电机与负载分开进行的。
所以有时候,我们要根据负载的实际运行情况,手动优化“速度环”的PID参数。
所以看下第23组参数。
(实际速度与设定速度的跟随性,主要通过DriveWindow软件看速度和电流曲线,看观察。
若偏差大或电流变化大,则需要手动更改PID参数。
)第23组参数:速度控制PID参数。
可以根据典型的阶跃响应或实际运行情在低速时速度控制的动态性能可以通过增加比例增益和减少积分时间来改善。
速度控制器的输出就是转矩控制器的给定。
转矩给定由参数MAXIMUM TORQUE 和 MINIMUM TORQUE 限定。
(14) 第24组参数:转矩控制。
(不需要改变)(15) 第27组参数:用来激活“制动单元”,当使用内置斩波器时,需要设置此参数。
和标准程序一样。
(16) 第28组参数:仅在“标量”方式下,起作用。
(注:不需要改变)(17) 第30组参数:可以进行可编程的故障,都要根据实际情况进行设置。
接地、缺相、堵转,肯定是“故障”。
注意一点:这一组参数是可进行编程的故障”,有些故障,就是不设置,也要故障,属于系统故障。
(18)第67组参数:抱闸功能。
当通过变频器来控制机械抱闸时,需要此功能,同时要有个DO,设置为“抱闸抬起命令”。
如果通过PLC控制抱闸,那么就不需载来说,关键是看机械抱闸与电机的配合。
如果配合不好,就容易出现下面的现象:A 当正向启动时,抱闸打开,提升力矩小,造成负载下滑;B 当正向启动时,抱闸打开,提升力矩大,造成负载点头;C 当正向运行中,撤销正向命令,抱闸没来的及抱死,造成负载下滑。
D 当反向启动时(此方向表示负载下降),抱闸打开时,负载失速。
E 当反向运行中,撤销反向命令,抱闸没来的及抱死,造成负载下滑。
采用提升变频器控制的好坏,其中一点就是与机械抱闸的配合。
所以,有必要仔细了解下这组参数。
从上图,我们来看一下,提升变频器是如何启动以及停止的。
过程如下:A 首先是励磁命令(ON)有了,这时候,电机先开始励磁,励磁时间由设置;这时候,变频器是“准备运行”状态。
B 励磁时间完毕,这时候,如果有变频器的运行命令,那么“变频器处于运行状态”,开始执行“转矩验证”,“转矩验证OK”信号来了之后,延时一段时间,抱闸打开。
C 当抱闸打开命令来了,确认抱闸打开,实际速度才加速上升到给定的速度值。
=(BRAKE FALL TIME)机械制动的施加时间。
BRAKE FLT TD 信号 BRAKE FAULT 延时。
= BRAKE REOPEN TD 在两次制动抬起命令之间的最少时间间隔。
=5% ZERO SPEED LEV 本参数用于设置ZERO SPEED 指示的速度值。
警告: 不要设为 0% 。
=10MS,ZERO SPEED TIME 当电机速度低于ZERO SPEED LEV 时,信号ZERO SPEED 置”1”前的延时。
=,8SPEED REF TD 速度给定释放给积分单元前的延时。
=AUTO TQ MEM ,(START TORQ SEL)AUTO TQ MEM = 选择自动转矩记忆。
注:参数中设定的值被用于转矩记忆得最小值。
= 启动转矩。
(19) 第50组参数:用来设置“测速编码器”,前提使用“”激活。
(20) 第51组参数:用来设置“PROFIBUS-DP”通讯,前提使用“”激活。
(21) 第72 组参数:用来2个电机(或以上)速度同步或转矩同步。
以上参数是如何使用的,可能还有一些不常用的参数,我们通过一些例子来熟悉。