差分后处理
- 格式:pptx
- 大小:5.50 MB
- 文档页数:26

测绘技术中的GPS差分处理方法GPS(全球定位系统)是一种利用卫星信号来测量地球上任意位置坐标的技术。
它在现代测绘和导航中起着举足轻重的作用。
然而,由于GPS信号在传输过程中会受到多种误差的影响,单靠普通的GPS接收器很难获得高精度的测量结果。
为了解决这个问题,差分处理技术应运而生。
差分处理技术是一种将参考站点的测量结果作为基准,用以校正其他接收器观测数据误差的方法。
它通过比较基准站和移动站的观测数据来计算和校正GPS信号受到的各种误差,从而提高测量精度。
下面将介绍几种常见的差分处理方法。
首先是实时差分处理方法。
该方法要求基准站和移动站同时进行测量,并通过无线通信将基准站的观测数据传输给移动站。
移动站根据基准站和自身的观测数据,使用差分算法计算出误差校正值,并将其应用于自身的测量结果。
实时差分处理方法可以实现即时纠正,适用于需要快速获取高精度测量结果的应用,如地震监测和导航等。
其次是后处理差分处理方法。
该方法要求基准站和移动站在不同的时间进行测量,移动站在测量完成后将观测数据传输给后处理软件进行差分计算。
后处理软件使用基准站和移动站的观测数据进行计算,得出误差校正值,并将其应用于移动站的测量结果。
后处理差分处理方法具有较高的精度和灵活性,适用于需要获取更高精度测量结果或者对数据进行深入分析的应用,如地质勘探和测绘绘图。
另外,还有一种差分处理方法称为网络差分处理。
该方法利用多个基准站同时进行观测,并将观测数据上传至一个中心服务器进行计算。
移动站通过访问服务器获取误差校正值,并将其应用于自身的测量结果。
网络差分处理方法具有较高的可扩展性和覆盖范围,适用于大范围测量和监测应用,如城市规划和农业精准测量。
除了差分处理方法,还有一些其他技术可以用于提高GPS测量的精度。
例如,多频段接收器技术可以利用不同频率的信号来抵消电离层延迟误差;多路径抑制技术可以通过使用方向性天线和信号处理算法来减少多路径效应对测量结果的影响;精密时钟技术可以通过使用高稳定性的时钟设备来减少钟差误差等。

提高点位坐标精度的gnss差分修正方法及应用
GNSS差分修正是通过利用两个或多个接收机之间的差分信号来提高
定位精度的方法。
一般来说,差分修正可以分为实时差分修正和后处理差
分修正。
实时差分修正可使接收器在实时环境下获得更准确的定位结果,
而后处理差分修正则可以在数据后处理期间对有关数据进行精细矫正。
对于点位坐标精度较高的定位应用,推荐使用实时差分修正方法。
该
方法的流程如下:
1.在ASCII格式的文本文件中输入基准站的数据,如时钟偏差、星历、码偏差等。
2.连接两个或多个接收器,选择其中一个作为移动接收器,另一个或
多个作为基准站接收器。
3.移动接收器从基准站接收器中接收到差分信号和基准站数据。
4.差分信号将移动接收器的信号与基准站接收器的信号进行比较,并
通过计算将移动接收器的位置矫正。
5.通过此修正可使移动接收器在实时环境下获得更准确的定位结果,
从而提高点位坐标精度。
对于对点位坐标精度要求不高的应用,如地图展示、轨迹记录等,建
议使用后处理差分修正方法。
该方法的流程如下:
1.收集经纬度数据。
2.将数据输入到差分比较软件中进行差分计算。
3.可以选择多种算法对数据进行处理,例如 Kalman 筛选器、最小二乘法等。
4.校正完后,数据即可在地图上进行展示,或者生成轨迹记录。
总之,GNSS差分修正是提高点位坐标精度的重要方法之一。
根据不同的应用场景,可以选择实时差分修正或后处理差分修正等方法,以提高定位的准确性。

高精度后差分解算操作手册一、软件的安装1、“Hi-Target GPS后处理软件3.0 ”的安装(见《Hi-Target TM Solution GPS数据处理软件Ⅲ》使用手册)2、高精度后处理软件的安装将“高精度后处理软件”文件夹下的所有文件“Hit.exe、rtkWin.exe、InstDrv.exe、GPS$$$.TMP、register.txt”拷贝到安装目录(\Hi-Target Solution\Bin)下,且覆盖掉原文件Hit.exe。
二、软件的操作1、将“Hi-Target GPS后处理软件3.0 ”软件狗和“高精度后处理软件”软件狗一起插在电脑的并口。
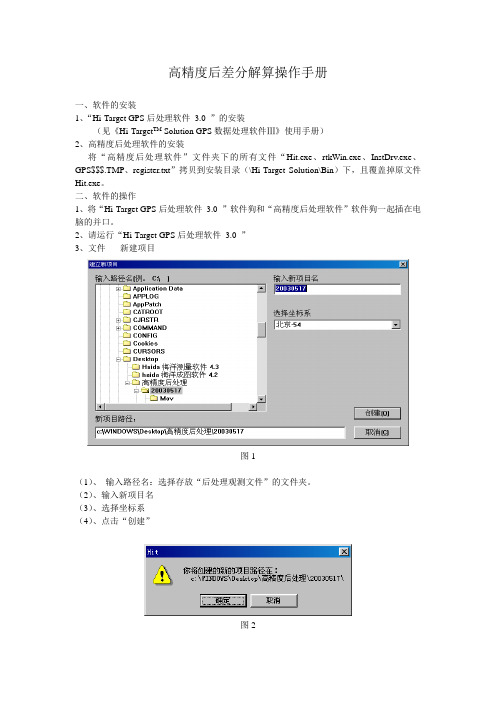
2、请运行“Hi-Target GPS后处理软件3.0 ”3、文件-----新建项目图1(1)、输入路径名:选择存放“后处理观测文件”的文件夹。
(2)、输入新项目名(3)、选择坐标系(4)、点击“创建”图2(5)、点击“确定”4、文件------导入(1)、选择“观测文件格式”,点击“确定”图3 (2)、选择“观测文件”,点击“打开”图4 5、输入基站坐标图5(1)、转换到“树形视图(图5)”(用“查看”菜单)(2)、点击“观测站点”(3)、在右边的区域里选择基准站,点击鼠标右键,在弹出的菜单里选择“属性”(4)、在弹出的对话框里的“已知点坐标”(图6)标签页选择“固定方式”,输入固定坐标,并开启“约束”(使其打勾)图66、输入中央子午线(网平差------网平差设置)图77、动态差分-------动态数据处理设置一定要开启“应用载波相位解到输出文件”图88、解算动态路线(1)、在“树形视图里”点击左边的“动态路线”,再在右边选择要解算的路线,点击鼠标右键(图9)(2)、在弹出的对话框里(图10)选择“载波相位解算这条路线”图10(3)、随后弹出如图11对话框图11A、设置-----配置设置参数,一般用默认值。
图12B、数据分析------卫星轨迹查看卫星轨迹,卫星轨迹和右边图例颜色、卫星号对应(图13)。

卫星导航系统精度评估方法分析卫星导航系统是一种基于卫星定位技术的导航系统,可以为用户提供准确的位置、速度和时间信息。
对于卫星导航系统的用户来说,精度是其最为关注的性能指标之一。
因此,评估卫星导航系统的精度是至关重要的。
卫星导航系统的精度评估方法有多种,可以从不同的角度对其进行评估。
以下是几种常用的卫星导航系统精度评估方法:1. 静态测试法静态测试法是在已知的参考点上进行测试,通过与参考点测量结果的比对来评估卫星导航系统的精度。
这种方法通常可用于评估卫星导航系统的位置精度。
在测试过程中,可以选择多个参考点分布在不同区域,以全面评估卫星导航系统的覆盖范围和位置测量的精度。
2. 动态测试法动态测试法是在不同的移动场景下进行测试,通过与地面真实测量结果的比对来评估卫星导航系统的精度。
这种方法通常可用于评估卫星导航系统的速度和位置精度。
在测试过程中,可以模拟不同的运动轨迹和速度,以全面评估卫星导航系统在不同条件下的精度表现。
3. 差分处理法差分处理法是在已知参考站点与测试站点之间建立差分基线,通过比对差分结果来评估卫星导航系统的精度。
这种方法可以使用实时差分或者后处理差分两种方式进行。
实时差分方法通常用于实时导航应用,后处理差分方法通常用于精密定位应用。
差分处理法的优点是能够消除卫星导航系统和接收机的各种误差,提高测量结果的精度。
4. 数学模型法数学模型法是通过建立卫星导航系统的误差模型来评估其精度。
这种方法通常需要对卫星导航系统的误差源进行建模,并利用数学方法对误差进行估计和处理。
数学模型法的优点是能够对卫星导航系统的各种误差进行分析和优化,提高其精度。
综上所述,卫星导航系统的精度评估方法包括静态测试法、动态测试法、差分处理法和数学模型法等多种方法。
不同的评估方法适用于不同的评估场景和需求。
在评估卫星导航系统的精度时,可以选择合适的方法或者采用多种方法相互验证,以保证评估结果的准确性和可靠性。
需要注意的是,在进行精度评估时,还需考虑到卫星导航系统本身的性能特点、测量误差和环境干扰等因素的影响。

北斗实时后处理静态高精度差分的技术介绍北斗卫星导航系统是我国自主研发的卫星导航系统,具有全球覆盖、高精度、高可靠等特点。
在北斗系统的应用中,实时后处理静态高精度差分技术是一项重要的技术,本文将对其进行介绍。
一、实时后处理静态高精度差分技术的概念实时后处理静态高精度差分技术是指在接收北斗卫星信号的同时,对接收到的数据进行实时处理,得到高精度的位置信息。
该技术主要应用于静态测量,如测量基准点、地形地貌等。
二、实时后处理静态高精度差分技术的原理实时后处理静态高精度差分技术的原理是基于差分定位原理。
差分定位是指将一个接收机的位置作为参考点,通过与其他接收机的信号进行比较,得到相对于参考点的位置信息。
在实时后处理静态高精度差分技术中,通过将一个接收机作为基准站,将其他接收机的信号与基准站的信号进行比较,得到相对于基准站的位置信息。
三、实时后处理静态高精度差分技术的优势实时后处理静态高精度差分技术具有以下优势:1.高精度:通过差分定位原理,可以得到高精度的位置信息。
2.实时性:实时后处理技术可以在接收信号的同时进行处理,得到实时的位置信息。
3.适用性广:该技术适用于静态测量,如测量基准点、地形地貌等。
4.成本低:相对于实时动态差分技术,实时后处理技术的设备成本较低。
四、实时后处理静态高精度差分技术的应用实时后处理静态高精度差分技术在测绘、地质勘探、地震监测等领域有着广泛的应用。
1.测绘:在测绘中,实时后处理静态高精度差分技术可以用于测量基准点、地形地貌等。
2.地质勘探:在地质勘探中,实时后处理静态高精度差分技术可以用于测量地下水位、地下岩层等。
3.地震监测:在地震监测中,实时后处理静态高精度差分技术可以用于测量地震震级、震源位置等。
五、实时后处理静态高精度差分技术的发展趋势随着北斗卫星导航系统的不断完善,实时后处理静态高精度差分技术也在不断发展。
未来,该技术将更加普及,应用范围也将更加广泛。
同时,随着技术的不断进步,实时后处理静态高精度差分技术的精度也将不断提高。
数据差分处理数据差分处理是一种常见的数据处理方法,尤其在时间序列分析和图像处理中广泛应用。
简单来说,差分处理可以让我们更好地了解数据的变化、趋势和周期性。
下面我将从差分的定义、应用、常用方法以及注意事项等方面进行详细阐述。
一、差分的定义差分就是数列中相邻两个数字的差值。
比如,数列{1,2,3,5,6}的差分序列为{1,1,2,1},即2-1=1,3-2=1,5-3=2,6-5=1。
差分的定义仅仅是简单地计算相邻两个数字的差值。
但如果差分处理应用得当,可以在一定程度上突出数据的特性,方便进行进一步的分析。
二、差分的应用1、该方法可以去除季节性因素和趋势性因素,可以更好地捕捉数据的周期变化。
例如,在销售数据中,我们可以进行差分处理,来了解产品在某个季度的销售情况,并通过差分绘制折线图来反映其趋势。
2、这种方法常用于图像处理中,用于计算图像中相邻像素值之间的差异。
例如,三维重建中,我们可以对图像进行差分,以获得不同深度具有不同颜色的图像。
三、差分的常用方法1、一阶差分:为相邻两个数字的差值,可以通过diff()函数实现。
2、二阶差分:一次对原序列做一阶差分可以得到一阶差分序列,而一次对一阶差分序列做差分可以得到二阶差分序列。
二阶差分常用于数据平稳性检验中,可以通过diff(diff())函数实现。
3、移动平均差分:先将序列进行移动平均计算,再对移动平均后的序列进行差分,可以通过diff(movavg())函数实现。
四、差分处理应注意的问题1、样本量要足够大,以保证计算出来的结果的稳健性和可靠性。
2、差分时所选择的相邻数字的间隔时间应该合理,以便于能够明显地观察到数据的周期性变化。
3、差分后的结果也应当在某种程度上能反映出原始数据的意义和特性。
综上,数据差分处理作为一种基本的数据处理方法,在时间序列分析和图像处理中得到广泛应用。
其应用简单,实现较为方便,可以突出数据特性,便于进行动态分析和预测。
但使用时也要注意样本量、间隔时间和差分后结果的含义等问题,以避免使用误导性的数据进行分析。
前言GPS(GlobalPositionSystem)即为全球定位系统的简称。
它的含义是:利用导航卫星进行测时和测距,以构成全球定位系统,它具有全球性、全天候、连续性、实时性导航定位和定时功能,而且具有良好的抗干扰性和保密性,能为各类用户提供精密的三维坐标、速度和时间。
近年来,随着GPS接收机性能和数据处理技术逐渐完善,其应用领域也不断拓宽。
GPS后差分处理系统的功能基于南方测绘公司的北极星9200 型GPS接收机,采用走走停停后处理差分模式。
由于不通过数据链实时传输数据,因此不会受到电磁波传播的影响,具有精度高,抗干扰性强,作用距离长等特点,适合于不需要实时处理的各项测量工作。
9200便携式后差分测量系统轻巧,便于携带野外输入方便,可直接输入属性采集数据自动进入南方CASS成图软件,无需转换。
后差分行业解决方案:▲国土资源部地籍处:土地权属调查,有力推动国土资源管理数字化;▲国土资源部地矿处:地矿资源调查,提高矿权管理工作水平,实现矿权登记坐标标准化、管理自动化、数字化;▲水利部门:江河、水库水面区域调查,库容调查,水土保持、水土流失调查;▲农场:土地面积测量,作物规划,农场的范围确定;▲交通部门:公路、铁路、各种管线普查;▲林业部门:各种植被覆盖面积的调查,林业资源调查;▲海洋管理部门:海洋区域面积测量,海洋资源调查;▲大规模小比例尺的绘制;等。
经过我们在学校内、河滨公园的多次的实验,我们得出了GPS 后差分在应用上得一些心得,使我们在应用得时候更加得心应手。
不过我们在许多地方还存在不足,在这一点我会继续努力探索。
在实习期间我们曾经做过多次数字化测图和矿区面积、距离测量等工作,在实践中我们发现,用GPS后差分作业,有着很多优势,在本文中我会一一做详细论述。
2008年1月在鲁山马楼乡的一个铁矿尾矿库测地形图,就是我们应用GPS后差分的一个成功例子。
另外2008年3月我们在汝洲运用这项技术测量两矿边界和与临近村庄的距离,精度良好,完全符合标准,很好的完成了任务。
南方RTK静态后差分处理软件说明1.双击打开软件2.在文件---新建---输入“项目名称”、“施工单位”、选择“坐标系”和“控制网等级”,然后点确定。
3.在数据输入---增加观测数据文件---找到观测数据所在的文件夹---全选(有的文件如果不参与解算就不必选择)---确定。
4.等所有的点和基线全部出现后,选择“基线解算”---全部解算---完毕后如果所有的基线都是红色,表明全部合格,不合格的基线会显示灰色。
5.然后查看左侧列表中“基线简表”和“闭合环”是否有不合格的,如果有不合格的会显示“X”,这时就需要右键点击那条不合格的基线,在弹出的对话框中更改“高度截止角”和“历元间隔”,改成多少都可以,每次修改的幅度不要太大,每修改一次,就需要解算一次,直到右侧“方差比”大于3,合格了为止。
6.在数据输入---坐标数据录入---在点名栏选择已知点点号---在状态栏选择XYZ,如果已知点没有高程,就选择XY---然后依次输入此点的X、Y、Z,有几个已知点就选择几个,最后确定。
7.在平差处理中依次选择---自动处理---重复基线---闭合环闭合差(所有基线)---闭合环闭合差(使用基线)---手工计算闭合差---三维平差---二维平差---高程拟合---网平差计算,所有操作结束后,屏幕上会出现一个平差报告。
8.把平差报告往下拖动,重点看是否有绿色的字体(意味着超限),还有“三维自由网平差单位权中误差”,以及“二维网单位权中误差”,查看精度怎么样。
一般情况下这两个数值没有固定要求。
9.最后在“成果”---网平差成果---中选择你要输出的格式(包括“工程之星COT,也就是RTK手簿中的参数文件,还有平差报告WORD),选择好保存路径,然后点击输出就可以了。
GPS后差分数据处理通过人工进行处理,涉及到两个软件GNSS Solution (3.10.06版)和Teqc.exe。
分数据采集、数据转换和数据处理三步。
一、数据采集(一)工具:WinCommWinComm在GNSS Solution中的Tools中。
图1-1 进入WinComm工具(二)采集过程:1、进入WinComm,如图1-1。
2、设置com口参数,如图1-2。
图1-2 通讯设置注意:必须与现场GPS采集设备对应的com口参数设置一致。
设定好后可以通过Save Settings保存设置。
2010年4月1日现场端口设定所有接收到的数据均显示在这个窗口中。
图1-3 WinComm主界面3、选择可编程模式WinComm 提供了“简单模式(Simple GPS Recorder )”,该模式下,直接把数据保存到Director 位置下的File Name 文件中。
根据项目实际,我们选择“可编程模式(Programmable GPS recorder )”。
图1-4 采集参数图1-4 采集参数4、一个窗口只能采集一个Com口的数据,为采集多个监测点的GPS数据,必须开多个窗口。
每个窗口对应各自的Com口(串口参数必须与现场设备一致)。
允许开始采集时间有间隔,但采集时长必须相同!预先设定现场设备每15~30S向外发送一次数据,采集30min钟以上,得到的GPS数据精度较高,前提是:采集时段每个监测点都能收到5颗星以上的有效数据,且这些卫星指的是同一批卫星。
(三)输出格式会在Direction下生成.Raw的二进制数据文件(文件名:File Name)。
二、数据转换(一)工具:Teqc.exe。
(二)过程1、开始->运行,打开Dos2、进入teqc.exe所在文件夹。
3、运行命令T eqc –ash s –O.obs L1C1D1S1 +Nav *.nav *.raw >*.obs(1)-ash[tech] codecode = d for B-file survey datacode = s for streamed (MBEN/DBEN) data (RS232)code = r for R-file format datacode = u for U-file format data(2)-O.obs[_types]list of observables and the observables themselves in the data portion of the file .There are also a few other options that can be used to input information, but are never output +config or ++config:在文件的数据部分,列出观测值类型列表。