第4章 系统稳定性
- 格式:ppt
- 大小:503.00 KB
- 文档页数:36
第4节生态系统的稳定性学习目标核心素养1.描述生态系统稳定性的概念(重点)2.阐明生态系统具有一定的自我调节能力(难点)3.确立保护生物圈的意识1.科学思维:分析归纳不同生态系统自我调节能力不同的原因2.生命观念:生态系统的结构和功能相适应3.社会责任:保护生态环境【生活小思考】澳洲大陆在长期的演变过程中,形成了自己的生态系统,英国人在40年代引入欧洲野兔,结果繁殖成灾,使草原破坏非常严重,当时的澳洲人常常谈兔色变。
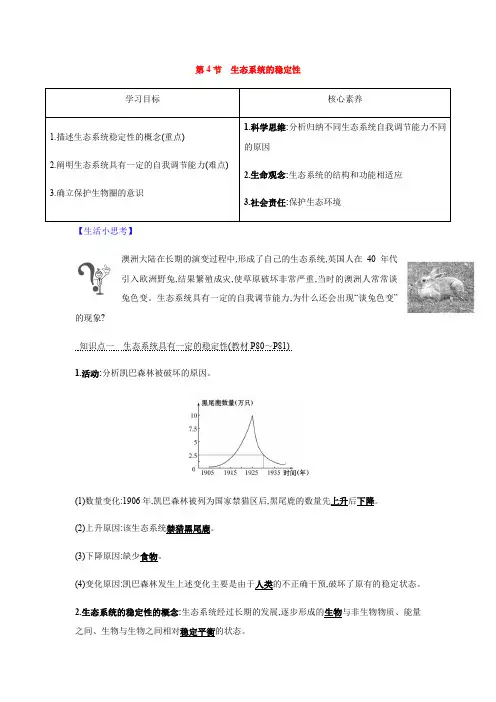
生态系统具有一定的自我调节能力,为什么还会出现“谈兔色变”的现象?知识点一生态系统具有一定的稳定性(教材P80~P81)1.活动:分析凯巴森林被破坏的原因。
(1)数量变化:1906年,凯巴森林被列为国家禁猎区后,黑尾鹿的数量先上升后下降。
(2)上升原因:该生态系统禁猎黑尾鹿。
(3)下降原因:缺少食物。
(4)变化原因:凯巴森林发生上述变化主要是由于人类的不正确干预,破坏了原有的稳定状态。
2.生态系统的稳定性的概念:生态系统经过长期的发展,逐步形成的生物与非生物物质、能量之间、生物与生物之间相对稳定平衡的状态。
【活学巧记】理解生态系统相对稳定的两个方面(1)生态系统内的生物种类和数量相对稳定。
(2)生物与生物以及生物与环境之间的能量流动和物质循环保持相对稳定。
知识点二生态系统具有一定的自我调节能力(教材P81~P82)1.生态系统发生一定的变化或受到外来因素干扰时,可通过生态系统内部的自我调节,克服系统内部的变化和外来干扰因素的影响,维持相对稳定和平衡的状态。
2.深入思考:为什么过度放牧会影响草原生态系统的稳定?提示:过度放牧会使草原上牛羊的数量猛增,超出草原的承载能力,草原生态系统的自我调节能力减弱,导致草原生态系统的稳定性下降。
【活学巧记】调节能力大小(反义词记忆法)(生物)少(结构)简单(能力)小(生物)多(结构)复杂(能力)大知识点三生态系统的自我调节能力是有限的(教材P83)1.稳定性破坏的原因:生态系统的自我调节能力是有限度的,当外来干扰因素超过了这个限度,生态系统就会失去自我调节能力,导致稳定状态被破坏。
第4章稳定性与李雅普诺夫方法稳定性是评估一个系统的重要性能指标,它描述了系统在一定初始条件下是否能够保持其平衡状态。
稳定性分为两种类型,即渐近稳定性和有界稳定性。
渐近稳定性指的是系统随着时间的推移趋向于其中一平衡状态,而有界稳定性指的是系统在任意时刻的状态都保持在其中一有界范围内。
为了评估系统的稳定性,我们可以利用李雅普诺夫方法。
李雅普诺夫方法是一种通过构造李雅普诺夫函数来判断系统稳定性的方法。
李雅普诺夫函数是一个满足特定条件的函数,它的导数反映了系统状态变化的趋势。
通过对李雅普诺夫函数的导数进行分析,我们可以判断系统在任意时刻的状态是否会向着平衡状态演进。
在利用李雅普诺夫方法进行稳定性分析时,通常需要满足以下条件:1.李雅普诺夫函数必须是正定函数,并且在系统的平衡点上取得最小值。
2.李雅普诺夫函数的导数必须是负定函数,即在系统的平衡点附近的任意一点,李雅普诺夫函数的导数都小于等于零。
如果满足以上条件,那么系统就是渐近稳定的。
反之,如果李雅普诺夫函数的导数是正定函数,那么系统就是不稳定的。
除了判断系统的稳定性外,李雅普诺夫方法还可以用于定量的稳定性分析。
通过分析李雅普诺夫函数的导数的大小,我们可以得到系统状态变化的速度。
如果李雅普诺夫函数的导数越小,那么系统的稳定性就越好。
反之,如果李雅普诺夫函数的导数越大,那么系统的稳定性就越差。
在实际应用中,李雅普诺夫方法广泛应用于控制系统、电路系统和机械系统等领域。
通过利用李雅普诺夫方法进行稳定性分析,我们可以评估系统的稳定性,并对系统进行控制,以保持系统的稳定状态。
总之,稳定性是一个评估系统性能的重要指标,通过利用李雅普诺夫方法可以判断系统的稳定性,并定量地分析系统的稳定性。
李雅普诺夫方法在控制系统、电路系统和机械系统等领域有广泛的应用前景。
《机械控制工程基础》课程教学大纲一、课程基本信息1.课程编号:MACH4008012.课程体系 / 类别:专业类/专业核心课3.学时 /学分:56学时/ 3学分4.先修课程:高等数学、积分变换、理论力学、电工电子技术、机械设计基础、大学计算机基础、高级程序设计5.适用专业:机械大类专业(包括机械工程、车辆工程、测控技术与仪器、能源与动力工程和工业工程)二、课程目标及学生应达到的能力《机械控制工程基础》是西安交通大学机械类专业的一门专业核心课程,主要授课内容是运用现代数学知识、自动控制理论和信息技术来分析、设计典型机电控制系统。
旨在培养学生运用科学方法和工具来解决机械工程基本问题的系统分析设计能力、综合创新能力。
本课程的主要任务是通过课堂教学、计算机仿真实训、实验教学等教学方式,使学生掌握实现机械系统自动控制的基本理论;学会典型机电系统的数学建模、运行性能分析和系统设计、校正与补偿等基本知识和基本技能;具有基本的机电控制系统分析设计能力,以及对复杂机械系统的控制问题进行分析、求解和论证的能力,并了解机械控制领域的新理论和新技术,支撑毕业要求中的相应指标点。
课程目标及能力要求具体如下:课程目标 1. 掌握机械控制系统的基本概念和组成原理,具备自动控制原理与系统的基础概念;掌握典型机电传动单元与系统的数学建模方法;掌握机电系统的时域和频域分析设计校正方法。
(毕业要求中的第 1)课程目标 2. 培养学生对机械控制工程中复杂问题的分析能力,能够对复杂机械控制系统进行分析、设计,并能够采用相关软件进行模拟仿真,能够构建实验控制系统进行分析研究,具有研究和解决机械控制工程问题的能力。
(毕业要求中的第 2 、4)课程目标 3. 初步了解机械系统常用的控制方法,以及现代控制和智能控制的原理,了解机械控制理论的现状与发展趋势。
培养学生运用机械控制工程领域新技术新方法对复杂机械工程中的系统控制问题进行理论分析、实验研究的能力。
稳定性当系统承受这种干扰之后,能否稳妥地保持预定的运动轨迹或者工作状态,这就是稳定性。
使问题简化,而不得不忽略某些次要因素。
近似的数学模型能否如实反映实际的运动,在某种意义上说,也是稳定性(鲁棒性)问题。
平衡状态(4-2)受扰运动:平衡状态:(4-5)0 x t t"³?是李雅普诺夫意义下稳定的。
李雅普诺夫稳定性就是要研究微分方程的解在tÎ[t,+¥)上的有界性。
1. 此处d 随着e 、t 0而变化;时有‖x (t ;t 0,x 0)‖<e "t ≥t 0成立初值变化充分小时,解的变化(t ≥ t 0)可任意小(不是无变化);(t 0,e )£e 。
edt0x (t 0)d (t 0,e )x 0x (t )李雅普诺夫意义下稳定的几何意义(t 0)‖一致稳定:(4-9)00(,,)0(,,)T t T t m d m d >()S e ()H e 0x x()S d ()S e 0x ()x t T()S d t固定的吸引区,不是<m ,t >t 0+ T(m ,t 0,x 0)t 0mt 0+ T(m , t 0, x 0)e00lim (,,)0®¥=t x t t x数量吸引区局部幸好,就我们所讨论的线性系统而言,全局和局部是一致的。
可见,即使初始值很大地偏离了平衡状态,系统最终0x1otl nx 非线性系统的解,),<。
故系统是李氏稳定的。
又与t d ddx xdt tttd<,,故其零解一致稳定。
又0t t 0t t()S e 0x ()x t ()S d cx ()e指数渐近稳定稳定渐近稳定一致渐近稳定一致稳定第一方法线性化的间接第二方法直接判断直接法李雅普诺夫第二方法目前仍是研究非线性、时变系统最有效的方法,是许多系统控制律设计李雅普诺夫第二法的主要定理(4-16)李雅普诺夫函数充分条件4-17)),则称系统原点平衡状态为大范围一致渐近稳定。