目视和仪表程序设计规范_vol3(Doc8168)
- 格式:pdf
- 大小:2.82 MB
- 文档页数:69

最全的仪表规范,你值得拥有!物位测量仪表物位测量仪表一般安排如下:1、物位测量仪表的仪表连接头 (管嘴) 位置应避开进入设各物流的冲击。
2、仪表的观测面应朝向操作通道,周围不应有妨碍维修仪表的物件。
物位测量仪表宜安装在平台一端,或加宽平台。
3、物位测量仪表的仪表连接头 (管嘴) 如在设备的底部,应伸入设备100mm。
4、测量界位时,物位测量仪表的上部仪表连接头 (管嘴) 必须位于液相层内。
5、数个液位计组合使用时,宜采用连通管安装型式。
玻璃板 (管) 液位计的安装要求如下:1、用玻璃板(管) 液位计和浮球(浮筒) 液位计测量同一液时,玻璃板 (管) 液位计的测量范围应包括浮球 (浮筒) 液位计的测量范围。
2、数个液位计组合使用时,相邻的两个液位计在垂直方向应重迭150~250mm ,其水平间距宜为200mm。
3、数个液位计组合使用时,宜采用外接连通管安装,连通管两端应装切断阀,玻璃板 (管) 液位计装在此管上,可不另装切断阀。
外浮筒液位计的安装要求如下:1、液位计两端应装切断阀。
2、液位计测量范围的中间位置。
3、顶底式法兰式液位计,上下仪表连接头 (管嘴) 的间距应至少比测量范围多500mm。
内浮筒液位计的安装要求如下:1、正常液位应在浮筒的中间位置。
2、液位波动较大时,应加防波管。
内浮球液位计的安装要求如下:1、液位计安装法兰的水平中心线应与正常液位一致。
2、在浮球活动范围内不应有障碍物,在物流冲击较大的场合应加防冲板。
磁致伸缩式液位计的安装要求如下:1、磁致伸缩式液位计宜安装于容器顶部或容器侧面引出的连通管顶部。
2、安装于拱顶罐或球罐顶部的磁致伸缩液位计宜采用法兰安装方式,法兰式仪表连接头 (管嘴)的内径应大于浮子直径。
3、当安装于容器外的连通管上时,连通管内径应大于浮子外径,连通管应采用非导磁材料 (如不锈钢、铝或合金) 制作。
超声波及微波 (雷达) 液 (料) 位计的安装要求如下:1、测量液位的场合,宜垂直向下检测安装。

仪表工作安全技术操作规程模版第一章总则第一条为保障仪表工作人员的安全,规范仪表工作的操作行为,防止事故的发生,特制定本安全技术操作规程。
第二条本规程适用于所有参与仪表工作的人员,包括仪表操作人员、维护人员等。
第三条仪表工作包括仪表的操作、维护、维修等工作。
第四条仪表工作必须按照国家相关法律法规、标准和企业制定的安全技术操作规程进行,并接受必要的培训。
第五条仪表工作人员必须熟悉本单位的工作环境、设备设施和工作程序,并按规定进行操作。
第二章仪表操作安全第六条仪表操作人员必须配备必要的个人防护装备,包括防护眼镜、耳塞、手套等,在操作过程中必须佩戴。
第七条仪表操作人员必须检查仪表的工作状态,确保仪表正常运行后方可进行操作。
第八条仪表操作人员在操作前必须仔细阅读仪表的操作手册,熟悉操作方法和注意事项,并按照要求进行操作。
第九条仪表操作人员必须按照操作手册中的要求进行仪表的开启、关闭、调整等操作,并时刻注意仪表的工作状态。
第十条仪表操作人员在操作过程中必须注意安全距离,禁止将身体部位靠近仪表的运动部件。
第十一条仪表操作人员在仪表操作过程中发现异常情况,应立即停止操作,并及时向上级报告。
第三章仪表维护安全第十二条仪表维护人员必须按照维护手册中的要求进行维护工作,确保仪表的正常使用。
第十三条仪表维护人员在进行维护工作前必须切断供电,并进行相关安全措施。
第十四条仪表维护人员必须检查仪表的安全装置,确保安全装置的正常运行。
第十五条仪表维护人员在维护过程中必须佩戴个人防护装备,切勿随意触摸仪表的运动部件。
第十六条仪表维护人员在维护过程中必须注意故障排除方法,并按照程序进行修复。
第十七条仪表维护人员在维护工作结束后必须清理现场,确保工作环境的整洁与安全。
第四章仪表维修安全第十八条仪表维修人员必须具备相应的维修技术和知识,并熟悉仪表的结构和工作原理。
第十九条仪表维修人员必须在维修前进行安全检查,并切断供电及相关管道。
第二十条仪表维修人员必须佩戴个人防护装备,并按照安全操作规程进行维修工作。

长安汽车(集团)有限责任公司技术规范— XXXX仪表板总成开发规范200 X - XX - XX 实施2006-03-10 发布长安汽车(集团)有限责任公司发布—200 x本规范按照长安汽车(集团)有限责任公司技术规范的标准格式的规定进行编写。
本规范由长安汽车(集团)有限责任公司提出。
本规范由长安汽车(集团)有限责任公司科技委管理。
本规范起草单位:长安汽车工程研究院本规范主要起草人:苏忠、王晓、苏童本规范批准人:(五号宋体)1—200x2引言汽车的自主开发是中国汽车业健康发展的必经之路。
也是长安车的生存之本。
在汽车内外饰开发设计中,仪表板总成设计是最难的,它代表着内外饰件自主开发设计的水平和标准。
在此,特编写此规范——《仪表板总成设计规范》,希望将自己多年来对仪表板设计的理解及经验与大家共同分享,更希望对对那些刚刚接触到仪表板开发的人员和对长安公司的自主开发有一些帮助。
本规范尚有许多不足之处,希望大家能给予指正。
—200 x仪表板总成开发规范1 范围本规范规定了汽车仪表板总成在开发设计过程中应遵守一些要求和标准,规定了仪表板总成开发的一般过程、材料的选择、结构及生产工艺等。
本规范适用于注塑成型为主、搪塑、吸塑软化生产工艺的M1 、N1 类车辆。
2 规范性引用文件下列文件中的条款通过本规范的引用而成为本规范的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本规范,然而,鼓励根据本规范达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本规范。
GB 4094-1999汽车操纵件、指示器及信号装置的标志GB 11552-1999轿车内部凸出物GB 11555-1994汽车风窗玻璃除霜系统的性能要求及试验方GB 11556-1994汽车风窗玻璃除霜系统的性能要求及试验方法GB 11562-1994汽车驾驶员前方视野要求及测量方法CM VR A01 -01车辆识别代号(VIN )管理规则QC/T 29089 -92汽车软化仪表板表皮GB8410汽车内饰材料燃烧特性试验方法GBT1040塑料拉伸试验方法HG 2-167塑料撕裂强度试验方法GB7 141塑料热空气老化试验方法(热老化箱法)通则GB 9344塑料氙灯光源曝露试验方法GB 2410透明塑料透光率和雾度试验方法CM VR A01 -01车辆识别代号(VIN )管理规则GB/T 15585-1995热塑性塑料成型收缩率的测定塑料变形温度的测定(通用试验方法)GB/T1843-1996塑料悬臂梁冲击试验方法塑料弯曲性能试验方法GB9342-19884QC/T15-1992 塑料洛氏硬度试验方法QC/T17-1992 汽车塑料制品通用试验方法3设计内容设计输入市场定位及设计任务书市场定位:根据制造厂对整车的市场定位,包括市场预测、销售目标人群、确定仪表板的整体风格、目标价格及档次。

仪表安全操作规程范本第一章总则第一条为了保障使用仪表的安全,在仪表操作过程中减少事故的发生,制定本规程。
第二章仪表的基本安全要求第二条仪表操作人员必须具备岗位所需的相关专业知识和经验,了解仪表的基本构造、原理、性能及操作方法。
第三条仪表必须符合国家和行业标准,且经过合格检验、校准及试验,取得合格证书并定期复验。
第四条仪表在运输、搬运、安装及使用过程中应注意防震、防尘、防爆、防水等要求,合理保护仪表的机械结构及各类传感器、元件等。
第五条仪表操作环境必须符合安全要求,确保操作人员和仪表的安全。
第三章仪表的操作流程及要求第六条仪表操作人员在正式操作仪表之前,必须仔细阅读仪表的使用说明书和安装、调试文件,并掌握相关知识和技能。
第七条仪表操作人员必须正确使用仪表,严禁以身试仪或进行不符合操作规程的行为。
第八条仪表操作人员在操作仪表时,必须佩戴符合要求的个人防护装备,如手套、护目镜、防护服等。
第九条仪表的操作人员必须按照仪表的操作流程进行操作,不得随意更改参数、关闭重要保护功能等。
第十条仪表操作人员在操作过程中如发现异常情况,应立即停止操作,并及时报告相关部门。
第四章仪表的日常维护第十一条仪表操作人员应定期检查仪表的外观,确保仪表的完好无损,并清理仪表的周围环境,防止灰尘、水汽等影响仪表的正常工作。
第十二条仪表操作人员应按照规定的方法对仪表进行校准,并记录校准结果,确保仪表的准确可靠。
第十三条仪表操作人员应定期维护仪表的传感器、元件等关键部件,保证其正常工作,并及时更换老化、损坏的部件。
第十四条仪表操作人员应定期进行仪表的保养,包括清洁、润滑等,以延长仪表的使用寿命,并记录维保情况。
第十五条仪表的维护工作必须由经过培训合格的人员进行,确保维护的有效性和安全性。
第五章仪表事故的处理与报告第十六条仪表操作人员在发生仪表事故时,必须立即停止操作,并采取安全措施处理事故,如切断电源、隔离现场等。
第十七条仪表操作人员必须及时报告仪表事故,并按照相关规定向上级部门汇报。
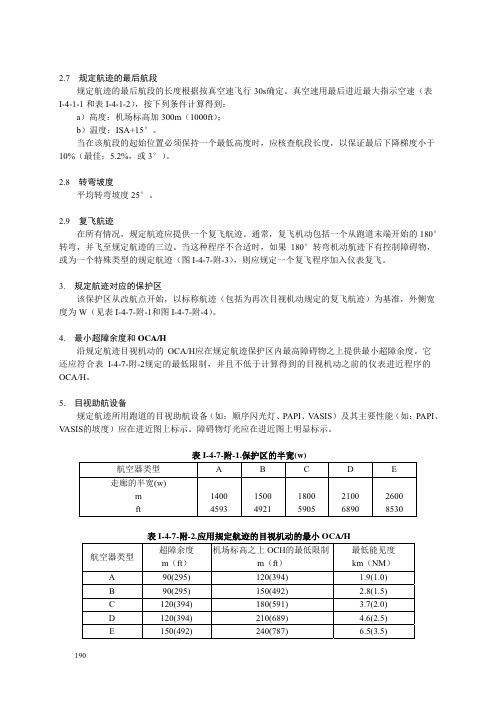
第三篇 程序设计1. 离场程序1.1 总则1.1.1 适用范围1.1.1.1 本章说明了RNAV和RNP程序的离场准则DŽ1.1.1.2 第一部分第三篇和第三部分第一ǃ二篇经本章准则补充或修改后适用于RNAV和RNP离场程序DŽ1.1.2 副区副区原则适用于直线段˄见第一部分第二篇1.2和1.3˅DŽ只限主区总宽度至少等于第一个航路点处的保护区半宽˄见表III-3-1-1˅的程序有副区˄见图III-3-1-1˅DŽ1.1.3 航段最短长度航段最短长度见本部分第二篇1表中DŽ平均飞行航径的设计见第一部分第三篇3附录DŽ1.1.4 保护区宽度1.1.4.1 连接有关定位点处的不同保护区宽度得到基于VOR/DMEǃDME/DME或GNSS的RNAV保护区总宽度DŽ保护区宽度的计算和计算中使用的基本容差见第一篇有关导航源的ĀXTTǃATT和保护区半宽ā章节DŽ即˖a˅VOR/DME˖见本部分第一篇 4.5˗b˅DME/DME˖见本部分第一篇 3.6˗c˅基本GNSS˖见本部分第一篇 2.5DŽ1.1.4.2 对于基于RNP的RNAVˈ公布的RNP值根据程序的位置减小时ˈ从起点RNP值至终点RNP值ˈ本部分第一篇7.5规定的保护区总宽度在中心线两侧按照30q收敛角减小DŽ1.2 直线离场初始离场航迹的对正˄Dİ15q˅由位于跑道起飞末端˄DER˅后面的第一个航路点位置确定DŽ1.3 开始离场的保护区宽度1.3.1 开始离场的保护区宽度ˈ适用一般准则˄见第一部分第三篇˅ˈ直至扩展边界与假想区˄见图III-3-1-1˅外边界相交ˈ随后保持假想区宽度至离场程序第一个航路点DŽ假想区从DER开始延伸至第一个航路点ˈ其在DER和第一个航路点的保护区半宽随导航源类型不同而不同˄见表III-3-1-1˅DŽ表III-3-1-1.假想区保护区半宽程序类型保护区半宽 km(NM)RNP2XTT+0.93(0.50)SBAS 1.85(1.00)基本GNSS9.26(5.00)VOR/DME或DME/DME 下列较大值˖a˅1.5XTT+0.93(0.50)b˅1.85(1.00)1.3.2 从DER开始扩展后ˈ基本GNSS保护区半宽保持不变ˈ直到距机场基准点56km˄30NM˅为止DŽ在56km˄30NM˅处ˈ保护区再次扩张˄扩张角15q˅ˈ直至保护区半宽达到14.82km˄8.00NM˅˄见图III-3-1-3˅DŽ3431.4 转弯离场1.4.1 总则1.4.1.1 可以规定四种转弯˖a˅在Ā旁切ā航路点转弯˗b˅在Ā飞越ā航路点转弯˄相当于指定TP转弯˅˗c˅在一个高度˄高˅转弯˄对RNP程序无效˅˗和d˅固定半径转弯˄只用于RNP程序˅DŽ注1˖对某些GNSS系统ˈĀ在一个高度˄高˅转弯ā不能在数据库中编码ˈ但如果运行上需要ˈ可规定在一个高度˄高˅转弯并以人工方式执行DŽ注2˖S BAS的转弯只能规定为旁切或飞越DŽ1.4.1.2 只要超障余度和其他考虑因素允许ˈ应使用在Ā旁切ā航路点转弯DŽ否则ˈ应避免使用在一个高度˄高˅转弯ˈ以防止转弯后航迹分布过散DŽ1.4.1.3 为使航空器正确实施转弯ˈ每一个规定的转弯最小为5qˈ最大不应大于120qDŽ但是最大值120q不适用于˄在一个高度˄高˅或在指定TP˅自由折返至航路点的转弯DŽ1.4.1.4 假定导航设备有预计转弯能力ˈ则不要求建立坡度的3s容差ˈ而只需考虑3s驾驶员反应时间DŽ1.4.1.5 对于SBASˈ转弯中的直线段最大保护区宽度为11.10km˄6.0NM˅DŽ1.4.2 在旁切航路点转弯1.4.2.1 总则在旁切航路点转弯时ˈ在航路点前要加上距离为rtan(A/2)的考虑转弯提前量DŽ这样ˈ得到点S ˄见图III-3-1-4˅DŽ最早转弯点˄在KüK线上˅位于点S前距离为ATT处DŽ本篇1.3的准则适用至˖a˅转弯外侧˖点S后距离为ATT加c处˗b˅转弯内侧˖最早TP˄在点S前距离为ATT处˅DŽ其中c为相当于3s驾驶员反应时间的距离DŽ1.4.2.2 转弯外边界1.4.2.2.1 在转弯外侧ˈ转弯区从下列位置处的主区边界开始˖a˅小于等于90q的转弯˖在航路点前面ˈ距离为˖rtan(A/2)ˉATTˉc˗b˅大于90q的转弯˖在航路点前面ˈ距离为˖rˉATTˉc˗式中˖c为相当于3s驾驶员反应时间的距离˗r为转弯半径DŽ1.4.2.2.2 按照第一部分第二篇3规定的画法ˈ从上述位置作风螺旋线或边界圆ˈ从而确定转弯主区DŽ1.4.2.2.3 另外ˈ为保护在要求速度范围内的航空器ˈ对主区外边界予以延长ˈ直到与平行于转弯后标称航迹的风螺旋线˄或边界圆˅切线相交DŽ转弯后ˈ用与转弯后标称航迹成30q收敛角的直线将主区和随后航段的主区相连DŽ1.4.2.2.4 转弯过程中ˈ副区保持固定宽度DŽ1.4.2.2.5 如果转弯的主区或副区边界在随后航段的保护区内ˈ则按照与转弯后标称航迹成15q的交角向外扩展此边界DŽ1.4.2.3 转弯内边界在转弯内侧ˈ主区边界始于KüK线DŽ主区和副区的边界分别与随后航段的对应部分按下列规则连接˖344a˅如果要连接的点在随后航段保护区之外ˈ则边界按照与转弯后标称航迹成一半转角˄A/2˅的角度收敛DŽb˅如果要连接的点在随后航段保护区之内ˈ则边界按照与转弯后标称航迹成15q的角度扩张DŽ1.4.3 在飞越航路点转弯1.4.3.1 规定转弯点˄T P˅为Ā飞越ā航路点DŽ本篇1.3的准则适用至˖a˅转弯外侧˖标称航路点后距离为ATT+c处˗b˅转弯内侧˖在标称航路点前距离为ATT处得最早TPDŽ其中c为相应于3s驾驶员反应时间的距离˄见图III-3-1-5˅DŽ1.4.3.2 转弯内边界和外边界在转弯外侧ˈ从TP后ATT+c˄3s˅对应的距离处作风螺旋线DŽ副区在转弯过程中保持固定宽度ˈ并与随后航路点的副区相连DŽ内边界的划设见本篇1.4.2.3DŽ1.4.4 在一个高度˄高˅转弯1.4.4.1 这类转弯不适用于RNP程序DŽ本篇1.3的准则适用于转弯起始区DŽ此后的转弯适用非RNAV 转弯离场的一般准则DŽ1.4.4.2 转弯内边界划设如下˖a˅从跑道起点之后600m侧方垂直于跑道中线的150m处的一点˄P˅开始ˈ做一条直线过目标航路点˗并且b˅在转弯一侧ˈ从第一个点˄P˅作垂直于此直线的RNAV保护区宽度DŽ1.4.4.3 从上述步骤新得到的点˄P c˅开始ˈ作圆心位于目标航路点的圆的切线DŽ该圆半径应等于使用飞行航迹上下一个航路点的XTT计算出来的½A/W˄见图III-3-1-6˅DŽ1.4.5 固定半径转弯1.4.5.1 本条只适用于RNP离场DŽ固定半径转弯˄也称为RF边˅是由下列因素规定的半径保持不变的环形路径˄见图III-3-1-7˅˖a˅转弯结束时的切点˗b˅转弯中心˗c˅转弯半径DŽ1.4.5.2 这种转弯要求航空器应能够使用不同的坡度消除风的影响ˈ并能保持相应于RNP的导航精度沿预定航迹飞行DŽ因此ˈ转弯半径r由下式确定˖r =(V+Vw)2 127094.tan T式中˖r单位为千米˗V和Vw单位为千米每小时(V+Vw)2r =68626.tan T式中˖r单位为海里˗V和Vw单位为节˗V为航空器最大真空速˗Vw为最大风速˗T为该飞行阶段的最大坡度DŽ˄假定最大坡度等于有关不同飞行阶段的各章节中规定的平均坡度再加上5q˅1.4.5.3 转弯边界的划设划设RF转弯保护区要先为主区定边界ˈ再在其两侧各加一个副区DŽa˅主区外边界主区外边界由环形段确定˖1˅圆心位于O点˗2˅半径为˖345346r+˄ATT+0.46˅/cos45q km ˗或 r +˄ATT+0.25˅/cos45q ΝΜ˗3˅范围由相邻直线段的边界界定˄J 点和 M 点˅˄见图 III-3-1-7˅DŽb ˅主区内边界主区内边界由环形段确定˖1˅半径为 r ˗2˅圆心位于距转弯中心˄O 点˅˄ATT+0.46˅/cos45q km 或˄ATT+0.25˅/cos45q NM 的 I 点˗3˅范围由相邻直线段的边界界定˄P 点和 R 点˅DŽc ˅转弯过程中的副区在主区边界上加上副区得到转弯的内ǃ外边界DŽ副区宽度保持 ATT 加 0.46km(0.25NM)不变DŽ图 III-3-1-1. 直线离场üü保护区第一部分的边界在第一个航路点之前与假假想区边界相交的情况图 III-3-1-2. 直线离场üü保护区第一部分的边界在第一个航路点之前没有达到假想区边界的情况347图 III-3-1-3. GNSS直线离场图 III-3-1-4. 在旁切航路点转弯图III-3-1-5.在飞越航路点转弯348图III-3-1-6.在一个高度˄高˅转弯后飞向一个航路点˄基本GNSS的例子˅349350图III-3-1-7.转弯离场üü固定半径转弯˄RF转弯˅2. 进场和进近程序2.1 总则2.1.1 适用范围2.1.1.1 本章规定了RNA V和RNP程序的进场ǃ进近和最后复飞准则DŽ最后进近和起始ǃ中间复飞的准则随进近类型˄NPAǃAPV和精密进近˅不同而不同ˈ各用一章予以规定DŽ2.1.1.2 第一部分ǃ第三部分第一ǃ二篇由本章作补充或修改后适用于RNA V和RNP进近程序DŽ2.1.1.3 起始进近点与结束复飞航段的航路点之间ˈRNA V进近程序使用的航路点不应超过9个DŽ2.1.2 副区适用副区的一般准则ˈ见第一部分第二篇1.2和1.3DŽ2.1.3 航段最短长度见本部分第二篇1DŽ2.1.4 保护区宽度2.1.4.1 保护区宽度的计算和计算中使用的基本容差见第一篇有关导航源的ĀXTTǃATT和保护区半宽ā章节DŽ即˖a˅VOR/DME˖见本部分第一篇4.5˗b˅DME/DME˖见本部分第一篇3.6˗c˅基本GNSS˖见本部分第一篇2.5˗d˅对于基于RNP的RNA Vˈ公布的RNP值根据程序的位置减小时ˈ从起点RNP值至终点RNP 值ˈ本部分第一篇7.5规定的保护区总宽度在中心线两侧按照30q收敛角减小DŽ2.1.5 RNA V程序的Y或T型设计概念基于ĀYā或ĀTā型概念的非精密进近的具体规定见第三部分第二篇3DŽ2.2 进场航线2.2.1 总则应使用进场超障准则至起始或中间进近定位点˄见第一部分第四篇2˅DŽ2.2.2 最低扇区高度或终端进场高度终端进场高度见本部分第二篇4DŽ如果没有提供TAAˈ应公布最低扇区高度ˈ见第一部分第四篇8的规定DŽ但对于GNSSˈ应只建立单一的全向扇区DŽ扇区中心为机场基准点的经纬坐标DŽ2.2.3 VOR/DME和DME/DME的保护区宽度2.2.3.1 VOR/DME和DME/DME的保护区从进场航段起点的宽度以最大收敛角30q缩小至IAF˄或适当的IF˅处的宽度˄见图III-3-2-1˅DŽ2.2.3.2 航段起点处的保护区宽度根据其至IAF˄或适当的IF˅的距离不同而不同DŽa˅进场航线起点距IAF大于46km˄25NM˅DŽ保护区起点处的½A/W取下列较大值˖1˅9.26km˄5.0NM˅˗2˅1.5XTT加3.70km(2.00NM)ˈXTT由FTTüü3.70km(2.00NM)确定DŽb˅进场航线起点距IAF小于等于46km˄25NM˅DŽ保护区起点处的½A/W取下列较大值˖1˅9.26km˄5.0NM˅˗或2˅1.5XTT加1.85km(1.00NM)ˈXTT由FTTüü1.85km(1.00NM)确定DŽ2.2.4 基本GNSS保护区宽度除了第一部分第四篇2的一般进场准则ˈ适用下面的准则DŽ基本GNSS保护区半宽见第三部分第一篇2.5DŽ在以机场基准点˄ARP˅为圆心56km˄30NM˅为半径的弧与标称航迹的交点ˈ保护区宽度从垂直于该点的位置以30q收敛角从中心线两侧缩小DŽ与一般进场准则相反ˈ在距ARP56km ˄30NM˅以外应使用航路宽度˄见图III-3-2-2和图III-3-2-3˅DŽ3512.2.5 RNP保护区宽度RNP进场˖a˅直到IAF前46km˄25NM˅ˈ应使用航路保护区半宽˗和b˅距IAF46km˄25NM˅及以内ˈ应使用起始进近保护区半宽DŽ保护区半宽见第一部分第一篇7.5DŽ保护区宽度在中心线两侧从Ā航路ā值以30q收敛角减小到Ā起始进近ā值˄见图III-3-2-4 a˅和b˅˅DŽ2.3 起始进近航段2.3.1 直线段2.3.1.1 起始进近的对正起始进近航迹与另一条起始进近航迹或中间进近航迹的交角不应大于120q。
仪表安全技术规程范本一、引言本仪表安全技术规程旨在保障仪表设备的安全运行并防止潜在的安全风险。
本规程适用于公司内各类仪表设备的安装、维护、操作和报废等工作。
通过严格执行本规程,能够确保仪表设备的稳定性和可靠性,最大程度地预防事故的发生,充分保护员工和设备的安全。
二、安全管理职责2.1 公司管理层应制定仪表安全管理制度,并组织落实有关培训,确保仪表安全技术规程的有效执行。
2.2 各部门负责人应明确各自的仪表安全责任,加强仪表设备的日常管理和维护工作,确保设备的正常运行。
2.3 工程技术人员应具备专业知识和技能,负责仪表设备的选型、安装和调试等工作,并制定相应的操作规程。
2.4 维修工人应具备维修技能和安全意识,严格按照维修规程和安全操作程序进行工作,保证维修质量和人员安全。
三、仪表设备的选型和安装3.1 在选型阶段,应根据工艺要求、环境条件和安全规范,选择合适的仪表设备,并进行必要的技术评估和比较。
3.2 安装仪表设备之前,应进行安全检查,确保现场环境安全和设备的完好性。
如发现安全隐患,应及时处理并报告相关负责人。
3.3 仪表设备的安装应符合相关安装规范和标准,如采用焊接连接方式,应满足焊接工艺的要求,确保连接的牢固和可靠。
3.4 安装完成后,应进行设备的初步调试和功能测试,确保设备的正常运行和准确性。
四、仪表设备的维护和保养4.1 定期维护是确保仪表设备长期稳定运行的重要措施,应按照维护计划进行维修和保养工作。
4.2 维护工作应严格按照维护规程进行,包括清洁、校准、紧固件检查和易损件更换等,确保设备的性能和精度。
4.3 在维护过程中,应采取必要的安全措施,如佩戴防护设备、切断电源等,以避免意外事故的发生。
4.4 维修人员应及时记录维护情况,并将维护结果进行反馈和评估,为后续的维护工作提供参考依据。
五、仪表设备的操作和使用5.1 操作人员应经过专业培训和考核合格后,方可操作仪表设备,并持有有效的操作证书。
《石油化工项目可行性研究报告编制规定》可研的主要要求:(着重说明)1、说明装置的自动化水平、控制规模和主要的控制方案。
2、按照先进、适用的原则,提出项目拟采用的先进控制系统和选用的主要仪表,提出配套增加的信息基础设施,信息控制和管理系统,并列出推荐方案的仪表一览表。
3、说明控制室、仪表供电、仪表用气方案。
4、对于新建厂和全厂性技术改造项目,说明如果用信息技术提升企业管理和运营水平。
《石油化工装置基础工程设计内容规定》SHSG-033-20087 仪表7.1 仪表的基础工程设计文件应有:仪表设计说明,仪表设计规定,仪表索引表,仪表规格书,仪表盘(柜)规格书,在线分析器室规格书,仪表及主要材料汇总表,控制室平面布置图,气体检测器平面布置图,仪表电缆主槽板敷设图或走向图,安全仪表系统逻辑框图、顺序控制系统逻辑框图或顺序控制系统时序框图、复杂控制回路图或其说明。
当采用分散控制系统(DCS)、安全仪表系统(SIS)、可编程序控制系统(PLC)、过程数据采集系统(SCADA)、过程计算机系统(PCS)时,应有相应的系统规格书。
7.2 仪表设计说明应包括下列内容:a) 生产装置对仪表和控制系统的要求,生产过程自动化水平,原料、中间产品、最终产品计量仪表的设置和精度要求;b) 检测和控制方案,包括特殊测量仪表、复杂控制、顺序控制、先进过程控制、安全仪表系统等的简要说明;c) 操作站、打印机、辅助操作台、仪表盘、各种机柜的规格、数量等;d) 为保证操作人员和生产装置的安全,根据装置情况设置安全仪表系统;在爆炸危险区内安装的电气仪表应符合的防爆要求;在可燃或有毒气体泄漏的地方设置可燃气体或有毒气体检测报警器;e) 仪表的防护、保温、保冷、隔热、防堵、防腐蚀、接地、防电磁干扰、防雷、防辐射等的措施;f) 仪表电源、气源和仪表伴热介质的来源和数量;g) 随设备成套供应的仪表及控制系统范围。
7.3 仪表设计规定应对规定的适用范围,仪表和控制系统的选用原则,环境和动力要求,选用的标准规范和控制室、现场仪表的安装及安装材料等设计原则作出规定,应包括如下内容:a) 设计选用的标准规范,信号传输标准,测量单位。
第三篇 程序设计1. 离场程序1.1 总则1.1.1 适用范围1.1.1.1 本章说明了RNAV和RNP程序的离场准则DŽ1.1.1.2 第一部分第三篇和第三部分第一ǃ二篇经本章准则补充或修改后适用于RNAV和RNP离场程序DŽ1.1.2 副区副区原则适用于直线段˄见第一部分第二篇1.2和1.3˅DŽ只限主区总宽度至少等于第一个航路点处的保护区半宽˄见表III-3-1-1˅的程序有副区˄见图III-3-1-1˅DŽ1.1.3 航段最短长度航段最短长度见本部分第二篇1表中DŽ平均飞行航径的设计见第一部分第三篇3附录DŽ1.1.4 保护区宽度1.1.4.1 连接有关定位点处的不同保护区宽度得到基于VOR/DMEǃDME/DME或GNSS的RNAV保护区总宽度DŽ保护区宽度的计算和计算中使用的基本容差见第一篇有关导航源的ĀXTTǃATT和保护区半宽ā章节DŽ即˖a˅VOR/DME˖见本部分第一篇 4.5˗b˅DME/DME˖见本部分第一篇 3.6˗c˅基本GNSS˖见本部分第一篇 2.5DŽ1.1.4.2 对于基于RNP的RNAVˈ公布的RNP值根据程序的位置减小时ˈ从起点RNP值至终点RNP值ˈ本部分第一篇7.5规定的保护区总宽度在中心线两侧按照30q收敛角减小DŽ1.2 直线离场初始离场航迹的对正˄Dİ15q˅由位于跑道起飞末端˄DER˅后面的第一个航路点位置确定DŽ1.3 开始离场的保护区宽度1.3.1 开始离场的保护区宽度ˈ适用一般准则˄见第一部分第三篇˅ˈ直至扩展边界与假想区˄见图III-3-1-1˅外边界相交ˈ随后保持假想区宽度至离场程序第一个航路点DŽ假想区从DER开始延伸至第一个航路点ˈ其在DER和第一个航路点的保护区半宽随导航源类型不同而不同˄见表III-3-1-1˅DŽ表III-3-1-1.假想区保护区半宽程序类型保护区半宽 km(NM)RNP2XTT+0.93(0.50)SBAS 1.85(1.00)基本GNSS9.26(5.00)VOR/DME或DME/DME 下列较大值˖a˅1.5XTT+0.93(0.50)b˅1.85(1.00)1.3.2 从DER开始扩展后ˈ基本GNSS保护区半宽保持不变ˈ直到距机场基准点56km˄30NM˅为止DŽ在56km˄30NM˅处ˈ保护区再次扩张˄扩张角15q˅ˈ直至保护区半宽达到14.82km˄8.00NM˅˄见图III-3-1-3˅DŽ3431.4 转弯离场1.4.1 总则1.4.1.1 可以规定四种转弯˖a˅在Ā旁切ā航路点转弯˗b˅在Ā飞越ā航路点转弯˄相当于指定TP转弯˅˗c˅在一个高度˄高˅转弯˄对RNP程序无效˅˗和d˅固定半径转弯˄只用于RNP程序˅DŽ注1˖对某些GNSS系统ˈĀ在一个高度˄高˅转弯ā不能在数据库中编码ˈ但如果运行上需要ˈ可规定在一个高度˄高˅转弯并以人工方式执行DŽ注2˖S BAS的转弯只能规定为旁切或飞越DŽ1.4.1.2 只要超障余度和其他考虑因素允许ˈ应使用在Ā旁切ā航路点转弯DŽ否则ˈ应避免使用在一个高度˄高˅转弯ˈ以防止转弯后航迹分布过散DŽ1.4.1.3 为使航空器正确实施转弯ˈ每一个规定的转弯最小为5qˈ最大不应大于120qDŽ但是最大值120q不适用于˄在一个高度˄高˅或在指定TP˅自由折返至航路点的转弯DŽ1.4.1.4 假定导航设备有预计转弯能力ˈ则不要求建立坡度的3s容差ˈ而只需考虑3s驾驶员反应时间DŽ1.4.1.5 对于SBASˈ转弯中的直线段最大保护区宽度为11.10km˄6.0NM˅DŽ1.4.2 在旁切航路点转弯1.4.2.1 总则在旁切航路点转弯时ˈ在航路点前要加上距离为rtan(A/2)的考虑转弯提前量DŽ这样ˈ得到点S ˄见图III-3-1-4˅DŽ最早转弯点˄在KüK线上˅位于点S前距离为ATT处DŽ本篇1.3的准则适用至˖a˅转弯外侧˖点S后距离为ATT加c处˗b˅转弯内侧˖最早TP˄在点S前距离为ATT处˅DŽ其中c为相当于3s驾驶员反应时间的距离DŽ1.4.2.2 转弯外边界1.4.2.2.1 在转弯外侧ˈ转弯区从下列位置处的主区边界开始˖a˅小于等于90q的转弯˖在航路点前面ˈ距离为˖rtan(A/2)ˉATTˉc˗b˅大于90q的转弯˖在航路点前面ˈ距离为˖rˉATTˉc˗式中˖c为相当于3s驾驶员反应时间的距离˗r为转弯半径DŽ1.4.2.2.2 按照第一部分第二篇3规定的画法ˈ从上述位置作风螺旋线或边界圆ˈ从而确定转弯主区DŽ1.4.2.2.3 另外ˈ为保护在要求速度范围内的航空器ˈ对主区外边界予以延长ˈ直到与平行于转弯后标称航迹的风螺旋线˄或边界圆˅切线相交DŽ转弯后ˈ用与转弯后标称航迹成30q收敛角的直线将主区和随后航段的主区相连DŽ1.4.2.2.4 转弯过程中ˈ副区保持固定宽度DŽ1.4.2.2.5 如果转弯的主区或副区边界在随后航段的保护区内ˈ则按照与转弯后标称航迹成15q的交角向外扩展此边界DŽ1.4.2.3 转弯内边界在转弯内侧ˈ主区边界始于KüK线DŽ主区和副区的边界分别与随后航段的对应部分按下列规则连接˖344a˅如果要连接的点在随后航段保护区之外ˈ则边界按照与转弯后标称航迹成一半转角˄A/2˅的角度收敛DŽb˅如果要连接的点在随后航段保护区之内ˈ则边界按照与转弯后标称航迹成15q的角度扩张DŽ1.4.3 在飞越航路点转弯1.4.3.1 规定转弯点˄T P˅为Ā飞越ā航路点DŽ本篇1.3的准则适用至˖a˅转弯外侧˖标称航路点后距离为ATT+c处˗b˅转弯内侧˖在标称航路点前距离为ATT处得最早TPDŽ其中c为相应于3s驾驶员反应时间的距离˄见图III-3-1-5˅DŽ1.4.3.2 转弯内边界和外边界在转弯外侧ˈ从TP后ATT+c˄3s˅对应的距离处作风螺旋线DŽ副区在转弯过程中保持固定宽度ˈ并与随后航路点的副区相连DŽ内边界的划设见本篇1.4.2.3DŽ1.4.4 在一个高度˄高˅转弯1.4.4.1 这类转弯不适用于RNP程序DŽ本篇1.3的准则适用于转弯起始区DŽ此后的转弯适用非RNAV 转弯离场的一般准则DŽ1.4.4.2 转弯内边界划设如下˖a˅从跑道起点之后600m侧方垂直于跑道中线的150m处的一点˄P˅开始ˈ做一条直线过目标航路点˗并且b˅在转弯一侧ˈ从第一个点˄P˅作垂直于此直线的RNAV保护区宽度DŽ1.4.4.3 从上述步骤新得到的点˄P c˅开始ˈ作圆心位于目标航路点的圆的切线DŽ该圆半径应等于使用飞行航迹上下一个航路点的XTT计算出来的½A/W˄见图III-3-1-6˅DŽ1.4.5 固定半径转弯1.4.5.1 本条只适用于RNP离场DŽ固定半径转弯˄也称为RF边˅是由下列因素规定的半径保持不变的环形路径˄见图III-3-1-7˅˖a˅转弯结束时的切点˗b˅转弯中心˗c˅转弯半径DŽ1.4.5.2 这种转弯要求航空器应能够使用不同的坡度消除风的影响ˈ并能保持相应于RNP的导航精度沿预定航迹飞行DŽ因此ˈ转弯半径r由下式确定˖r =(V+Vw)2 127094.tan T式中˖r单位为千米˗V和Vw单位为千米每小时(V+Vw)2r =68626.tan T式中˖r单位为海里˗V和Vw单位为节˗V为航空器最大真空速˗Vw为最大风速˗T为该飞行阶段的最大坡度DŽ˄假定最大坡度等于有关不同飞行阶段的各章节中规定的平均坡度再加上5q˅1.4.5.3 转弯边界的划设划设RF转弯保护区要先为主区定边界ˈ再在其两侧各加一个副区DŽa˅主区外边界主区外边界由环形段确定˖1˅圆心位于O点˗2˅半径为˖345346r+˄ATT+0.46˅/cos45q km ˗或 r +˄ATT+0.25˅/cos45q ΝΜ˗3˅范围由相邻直线段的边界界定˄J 点和 M 点˅˄见图 III-3-1-7˅DŽb ˅主区内边界主区内边界由环形段确定˖1˅半径为 r ˗2˅圆心位于距转弯中心˄O 点˅˄ATT+0.46˅/cos45q km 或˄ATT+0.25˅/cos45q NM 的 I 点˗3˅范围由相邻直线段的边界界定˄P 点和 R 点˅DŽc ˅转弯过程中的副区在主区边界上加上副区得到转弯的内ǃ外边界DŽ副区宽度保持 ATT 加 0.46km(0.25NM)不变DŽ图 III-3-1-1. 直线离场üü保护区第一部分的边界在第一个航路点之前与假假想区边界相交的情况图 III-3-1-2. 直线离场üü保护区第一部分的边界在第一个航路点之前没有达到假想区边界的情况347图 III-3-1-3. GNSS直线离场图 III-3-1-4. 在旁切航路点转弯图III-3-1-5.在飞越航路点转弯348图III-3-1-6.在一个高度˄高˅转弯后飞向一个航路点˄基本GNSS的例子˅349350图III-3-1-7.转弯离场üü固定半径转弯˄RF转弯˅2. 进场和进近程序2.1 总则2.1.1 适用范围2.1.1.1 本章规定了RNA V和RNP程序的进场ǃ进近和最后复飞准则DŽ最后进近和起始ǃ中间复飞的准则随进近类型˄NPAǃAPV和精密进近˅不同而不同ˈ各用一章予以规定DŽ2.1.1.2 第一部分ǃ第三部分第一ǃ二篇由本章作补充或修改后适用于RNA V和RNP进近程序DŽ2.1.1.3 起始进近点与结束复飞航段的航路点之间ˈRNA V进近程序使用的航路点不应超过9个DŽ2.1.2 副区适用副区的一般准则ˈ见第一部分第二篇1.2和1.3DŽ2.1.3 航段最短长度见本部分第二篇1DŽ2.1.4 保护区宽度2.1.4.1 保护区宽度的计算和计算中使用的基本容差见第一篇有关导航源的ĀXTTǃATT和保护区半宽ā章节DŽ即˖a˅VOR/DME˖见本部分第一篇4.5˗b˅DME/DME˖见本部分第一篇3.6˗c˅基本GNSS˖见本部分第一篇2.5˗d˅对于基于RNP的RNA Vˈ公布的RNP值根据程序的位置减小时ˈ从起点RNP值至终点RNP 值ˈ本部分第一篇7.5规定的保护区总宽度在中心线两侧按照30q收敛角减小DŽ2.1.5 RNA V程序的Y或T型设计概念基于ĀYā或ĀTā型概念的非精密进近的具体规定见第三部分第二篇3DŽ2.2 进场航线2.2.1 总则应使用进场超障准则至起始或中间进近定位点˄见第一部分第四篇2˅DŽ2.2.2 最低扇区高度或终端进场高度终端进场高度见本部分第二篇4DŽ如果没有提供TAAˈ应公布最低扇区高度ˈ见第一部分第四篇8的规定DŽ但对于GNSSˈ应只建立单一的全向扇区DŽ扇区中心为机场基准点的经纬坐标DŽ2.2.3 VOR/DME和DME/DME的保护区宽度2.2.3.1 VOR/DME和DME/DME的保护区从进场航段起点的宽度以最大收敛角30q缩小至IAF˄或适当的IF˅处的宽度˄见图III-3-2-1˅DŽ2.2.3.2 航段起点处的保护区宽度根据其至IAF˄或适当的IF˅的距离不同而不同DŽa˅进场航线起点距IAF大于46km˄25NM˅DŽ保护区起点处的½A/W取下列较大值˖1˅9.26km˄5.0NM˅˗2˅1.5XTT加3.70km(2.00NM)ˈXTT由FTTüü3.70km(2.00NM)确定DŽb˅进场航线起点距IAF小于等于46km˄25NM˅DŽ保护区起点处的½A/W取下列较大值˖1˅9.26km˄5.0NM˅˗或2˅1.5XTT加1.85km(1.00NM)ˈXTT由FTTüü1.85km(1.00NM)确定DŽ2.2.4 基本GNSS保护区宽度除了第一部分第四篇2的一般进场准则ˈ适用下面的准则DŽ基本GNSS保护区半宽见第三部分第一篇2.5DŽ在以机场基准点˄ARP˅为圆心56km˄30NM˅为半径的弧与标称航迹的交点ˈ保护区宽度从垂直于该点的位置以30q收敛角从中心线两侧缩小DŽ与一般进场准则相反ˈ在距ARP56km ˄30NM˅以外应使用航路宽度˄见图III-3-2-2和图III-3-2-3˅DŽ3512.2.5 RNP保护区宽度RNP进场˖a˅直到IAF前46km˄25NM˅ˈ应使用航路保护区半宽˗和b˅距IAF46km˄25NM˅及以内ˈ应使用起始进近保护区半宽DŽ保护区半宽见第一部分第一篇7.5DŽ保护区宽度在中心线两侧从Ā航路ā值以30q收敛角减小到Ā起始进近ā值˄见图III-3-2-4 a˅和b˅˅DŽ2.3 起始进近航段2.3.1 直线段2.3.1.1 起始进近的对正起始进近航迹与另一条起始进近航迹或中间进近航迹的交角不应大于120q。