台达电子凸轮设计共37页
- 格式:ppt
- 大小:4.02 MB
- 文档页数:37
【技术资料】台达可编程逻辑控制器plc 电子凸轮基于台达运动控制型PLC电子凸轮功能高速绕线机摘要,介绍台达DVP-20PM00D运动控制器电子凸轮,CAM,功能,阐述高速绕线机工作原理、工艺要求及相关控制程序概要。
关键词,运动控制电子凸轮主轴从轴 CAM Table1 引言本文介绍的全自动无骨架系列空心电磁线圈高速绕线机,可以绕制传动线圈,扬声器线圈,天线线圈以及各种无骨架通用线圈。
设备具有性能可靠,高速高效率,自动化程度高,适合于线圈制造业的批量生产,如图1所示。
图1 空心电磁线圈一般普通绕线机采用内置脉冲功能的小型PLC,通过绕线轴编码器速度输出到PLC内置高速输入点,将绕线轴与排线轴的速比进行简单速度同步,这种方法受 PLC 运算影响,同步精度差,计算量大,CPU处理时间较长,因此会出现绕线不均匀,堆积,塌陷等问题,严重影响绕线成品的质量,举例来说,PLC对绕线轴编码器作高速计数,当到达计数值时利用中断方式控制排线轴电机反向绕制,但受CPU运算处理时间的影响会出现滞后产生误差,在低速的情冴下尚可基本达到绕制要求,但是对于高速绕制多层线圈时就会出现线圈端面不齐整,成品品质下降。
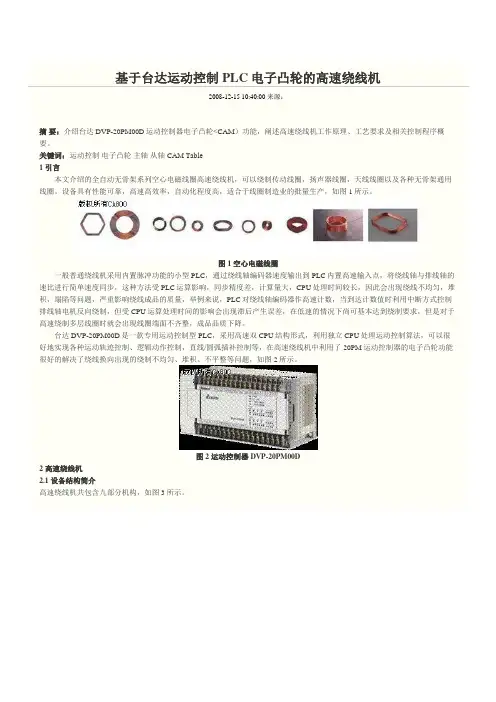
台达DVP-20PM00D是一款专用运动控制型PLC,采用高速双CPU结构形式,利用独立CPU处理运动控制算法,可以很好地实现各种运动轨迹控制、逻辑动作控制,直线/圆弧揑补控制等,在高速绕线机中利用了20PM运动控制器的电子凸轮功能很好的解决了绕线换向出现的绕制不均匀、堆积、不平整等问题,如图2所示。
图2 运动控制器DVP-20PM00D2 高速绕线机2.1 设备结构简介高速绕线机共包含九部分机构,如图3所示。
图3 高速绕线机,1,机架。
机架由角钢框架及不锈钢台面组成,并设置脚轮便于移动,当设备到位后可将支脚调低作为稳定支撑。
,2,张力机构。
安装于进线部分,作为绕线张力调节,保证线圈绕制时维持张力恒定,张力调节器具有调节旋钮可针对不同需求进行张力调节设定,调整完毕后,张力调节器自动控制绕线张力。
基于台达运动控制PLC电子凸轮的高速绕线机2008-12-15 10:40:00 来源:摘要:介绍台达DVP-20PM00D运动控制器电子凸轮<CAM)功能,阐述高速绕线机工作原理、工艺要求及相关控制程序概要。
关键词:运动控制电子凸轮主轴从轴 CAM Table1 引言本文介绍的全自动无骨架系列空心电磁线圈高速绕线机,可以绕制传动线圈,扬声器线圈,天线线圈以及各种无骨架通用线圈。
设备具有性能可靠,高速高效率,自动化程度高,适合于线圈制造业的批量生产,如图1所示。
图1 空心电磁线圈一般普通绕线机采用内置脉冲功能的小型PLC,通过绕线轴编码器速度输出到PLC内置高速输入点,将绕线轴与排线轴的速比进行简单速度同步,这种方法受PLC运算影响,同步精度差,计算量大,CPU处理时间较长,因此会出现绕线不均匀,堆积,塌陷等问题,严重影响绕线成品的质量,举例来说,PLC对绕线轴编码器作高速计数,当到达计数值时利用中断方式控制排线轴电机反向绕制,但受CPU运算处理时间的影响会出现滞后产生误差,在低速的情况下尚可基本达到绕制要求,但是对于高速绕制多层线圈时就会出现线圈端面不齐整,成品品质下降。
台达DVP-20PM00D是一款专用运动控制型PLC,采用高速双CPU结构形式,利用独立CPU处理运动控制算法,可以很好地实现各种运动轨迹控制、逻辑动作控制,直线/圆弧插补控制等,在高速绕线机中利用了20PM运动控制器的电子凸轮功能很好的解决了绕线换向出现的绕制不均匀、堆积、不平整等问题,如图2所示。
图2 运动控制器DVP-20PM00D2 高速绕线机2.1 设备结构简介高速绕线机共包含九部分机构,如图3所示。
图3 高速绕线机<1)机架。
机架由角钢框架及不锈钢台面组成,并设置脚轮便于移动,当设备到位后可将支脚调低作为稳定支撑。
<2)张力机构。
安装于进线部分,作为绕线张力调节,保证线圈绕制时维持张力恒定,张力调节器具有调节旋钮可针对不同需求进行张力调节设定,调整完毕后,张力调节器自动控制绕线张力。