机械原理 凸轮机构及其设计
- 格式:doc
- 大小:4.24 MB
- 文档页数:26
机械原理课程教案一凸轮机构及其设计一、教学目标及基本要求1了解凸轮机构的基本结构特点、类型及应用,学会根据工作要求和使用场合选择凸轮机构。
2.了解凸轮机构的设计过程,对凸轮机构的运动学、动力学参数有明确的概念。
3.掌握从动件常用运动规律的特点及适用场合,了解不同运动规律位移曲线的拼接原则与方法。
4.掌握凸轮机构基本尺寸设计的原则,学会根据这些原则确定移动滚子从动件盘形凸轮机构的基圆半径、滚子半径和偏置方向,摆动从动件盘形凸轮机构的摆杆长、中心距以及移动平底从动件平底宽度。
5.熟练掌握应用反转法原理设计平面凸轮廓线,学会凸轮机构的计算机辅助设计方法。
二、教学内容及学时分配第一节概述第二节凸轮机构基本运动参数设计第三节凸轮机构基本尺寸设计(第一、二、三节共2学时)第四节凸轮轮廓曲线设计(15学时)第五节凸轮机构从动件设计(1学时)第六节凸轮机构的计算机辅助设计(0.5学时)三、教学内容的重点和难点重点:1.凸轮机构的型式选择。
2.从动件运动规律的选择及设计。
3.盘形凸轮机构基本尺寸的设计,凸轮轮廓曲线设计的图解法和解析法。
4.从动件的设计,包括高副元素形状选择,滚子半径和平底宽度的确定。
难点:凸轮轮廓曲线设计的图解法四、教学内容的深化与拓宽空间凸轮机构与高速凸轮机构简介。
五、教学方式与手段及教学过程中应注意的问题充分利用多媒体教学手段,围绕教学基本要求进行教学。
在教学过程中应强调凸轮机构的运动学参数与结构参数的概念及其选用设计;应用反转法原理进行凸轮轮廓曲线的图解法设计时凸轮转角的分度,要注意从动件反转方向;正确确定偏置移动从动件凸轮机构在反转过程中从动件所依次占据的位置线;滚子从动件凸轮机构理论轮廓曲线与实际轮廓曲线的联系和区别等。
要注意突出重点,多采用启发式教学以及教师和学生的互动。
六、主要参考书目1黄茂林,秦伟主编.机械原理.北京:机械工业出版社,2010 2申永胜主编.机械原理教程(第2版).北京:清华大学出版社,20053孙桓,陈作模、葛文杰主编.机械原理(第七版).北京:高等教育出版社,20064石永刚,徐振华.凸轮机构设计.上海:上海科学技术出版社,1995七、相关的实践性环节凸轮机构运动参数测试实验。
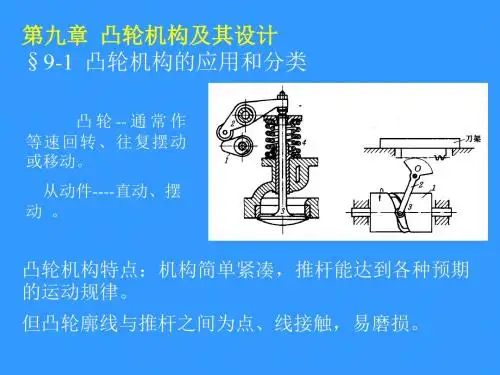
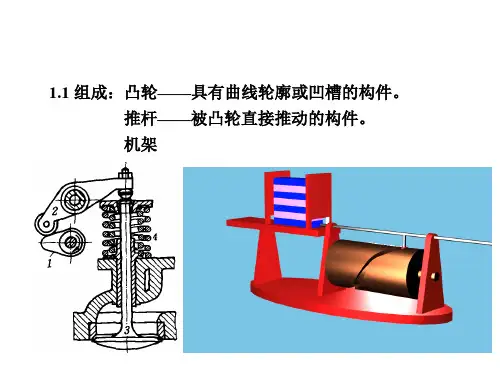
第六讲凸轮机构及其设计(一)凸轮机构的应用和分类一、凸轮机构1.组成:凸轮,推杆,机架。
2.优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。
缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。
二、凸轮机构的分类1.按凸轮的形状分:盘形凸轮圆柱凸轮2.按推杆的形状分尖顶推杆:结构简单,能与复杂的凸轮轮廓保持接触,实现任意预期运动。
易遭磨损,只适用于作用力不大和速度较低的场合滚子推杆:滚动摩擦力小,承载力大,可用于传递较大的动力。
不能与凹槽的凸轮轮廓时时处处保持接触。
平底推杆:不考虑摩擦时,凸轮对推杆的作用力与从动件平底垂直,受力平稳;易形成油膜,润滑好;效率高。
不能与凹槽的凸轮轮廓时时处处保持接触。
3.按从动件的运动形式分(1)往复直线运动:直动推杆,又有对心和偏心式两种。
(2)往复摆动运动:摆动推杆,也有对心和偏心式两种。
4.根据凸轮与推杆接触方法不同分:(1)力封闭的凸轮机构:通过其它外力(如重力,弹性力)使推杆始终与凸轮保持接触,(2)几何形状封闭的凸轮机构:利用凸轮或推杆的特殊几何结构使凸轮与推杆始终保持接触。
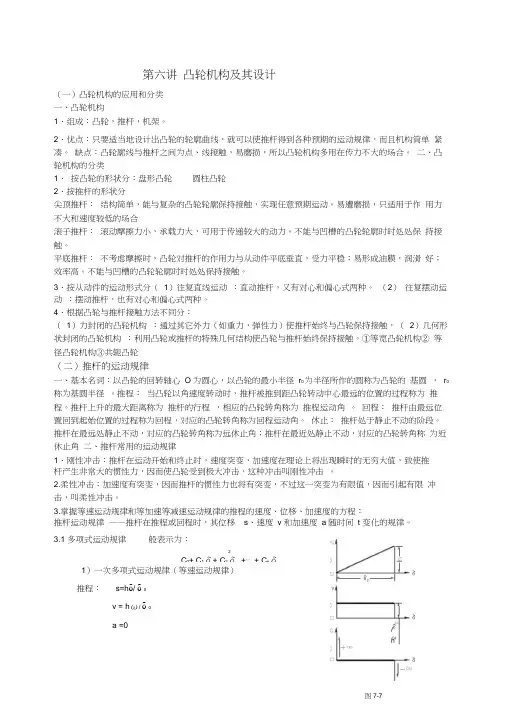
①等宽凸轮机构② 等径凸轮机构③共轭凸轮(二)推杆的运动规律一、基本名词:以凸轮的回转轴心O 为圆心,以凸轮的最小半径r0为半径所作的圆称为凸轮的基圆,r0 称为基圆半径。
推程:当凸轮以角速度转动时,推杆被推到距凸轮转动中心最远的位置的过程称为推程。
推杆上升的最大距离称为推杆的行程,相应的凸轮转角称为推程运动角。
回程:推杆由最远位置回到起始位置的过程称为回程,对应的凸轮转角称为回程运动角。
休止:推杆处于静止不动的阶段。
推杆在最远处静止不动,对应的凸轮转角称为远休止角;推杆在最近处静止不动,对应的凸轮转角称为近休止角二、推杆常用的运动规律1.刚性冲击:推杆在运动开始和终止时,速度突变,加速度在理论上将出现瞬时的无穷大值,致使推杆产生非常大的惯性力,因而使凸轮受到极大冲击,这种冲击叫刚性冲击。
机械原理第九章凸轮机构及设计凸轮机构是一种非常常见且重要的机械原理,广泛应用于各种机械、自动化设备以及机械工程中。
凸轮机构主要由凸轮、从动件和工作件组成,通过凸轮的转动,从动件与工作件之间的运动关系被确定,从而实现特定的机械工作。
在凸轮机构的设计过程中,需要考虑凸轮的形状、尺寸和运动规律,以及从动件与工作件的连接方式和相对运动关系等因素。
凸轮的形状通常是基于工作要求和约束条件而确定的,常见的凸轮形状包括圆形凸轮、倒头凸轮、冷凸轮等。
凸轮机构的设计需要根据具体的工作要求和条件来确定凸轮的运动规律。
常见的凸轮运动规律包括简谐运动、等角速度运动和等距离运动等。
在设计过程中,需要根据工作要求来选择合适的凸轮运动规律,以确保机构的工作稳定性和精度。
凸轮机构设计的关键是确定从动件与工作件之间的连接方式和相对运动关系。
常见的从动件与工作件的连接方式包括滑块连接、摆杆连接和球头连接等。
这些连接方式的选择需要考虑凸轮运动规律、工作要求和机构的设计要求等因素。
而从动件与工作件之间的相对运动关系则可以通过凸轮的形状和凸轮运动规律来确定。
凸轮机构设计还需要考虑诸如凸轮的材料、强度和润滑等问题。
凸轮的材料通常选择硬度高、耐磨性好的材料,以保证凸轮的使用寿命和稳定性。
凸轮的强度可以通过强度计算和有限元分析等方法来确定,以确保凸轮在工作过程中不会发生破坏。
润滑问题也需要考虑,选择合适的润滑方式和润滑剂,以减少凸轮机构的摩擦和磨损。
总之,凸轮机构的设计是一个综合考虑凸轮形状、尺寸、运动规律、连接方式、相对运动关系、材料、强度和润滑等多方面因素的过程。
只有充分考虑这些因素,并结合具体的工作要求和条件,才能设计出稳定、高效的凸轮机构。
凸轮机构的设计不仅需要具备丰富的机械原理知识和设计经验,还需要进行大量的实验和验证,以确保机构的可靠性和性能。
第六讲凸轮机构及其设计(一)凸轮机构的应用和分类一、凸轮机构1.组成:凸轮,推杆,机架。
2.优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。
缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。
二、凸轮机构的分类1.按凸轮的形状分:盘形凸轮圆柱凸轮2.按推杆的形状分尖顶推杆:结构简单,能与复杂的凸轮轮廓保持接触,实现任意预期运动。
易遭磨损,只适用于作用力不大和速度较低的场合滚子推杆:滚动摩擦力小,承载力大,可用于传递较大的动力。
不能与凹槽的凸轮轮廓时时处处保持接触。
平底推杆:不考虑摩擦时,凸轮对推杆的作用力与从动件平底垂直,受力平稳;易形成油膜,润滑好;效率高。
不能与凹槽的凸轮轮廓时时处处保持接触。
3.按从动件的运动形式分(1)往复直线运动:直动推杆,又有对心和偏心式两种。
(2)往复摆动运动:摆动推杆,也有对心和偏心式两种。
4.根据凸轮与推杆接触方法不同分:(1)力封闭的凸轮机构:通过其它外力(如重力,弹性力)使推杆始终与凸轮保持接触,(2)几何形状封闭的凸轮机构:利用凸轮或推杆的特殊几何结构使凸轮与推杆始终保持接触。
①等宽凸轮机构②等径凸轮机构③共轭凸轮(二)推杆的运动规律一、基本名词:以凸轮的回转轴心O为圆心,以凸轮的最小半径r0为半径所作的圆称为凸轮的基圆,r0称为基圆半径。
推程:当凸轮以角速度转动时,推杆被推到距凸轮转动中心最远的位置的过程称为推程。
推杆上升的最大距离称为推杆的行程,相应的凸轮转角称为推程运动角。
回程:推杆由最远位置回到起始位置的过程称为回程,对应的凸轮转角称为回程运动角。
休止:推杆处于静止不动的阶段。
推杆在最远处静止不动,对应的凸轮转角称为远休止角;推杆在最近处静止不动,对应的凸轮转角称为近休止角二、推杆常用的运动规律1.刚性冲击:推杆在运动开始和终止时,速度突变,加速度在理论上将出现瞬时的无穷大值,致使推杆产生非常大的惯性力,因而使凸轮受到极大冲击,这种冲击叫刚性冲击。
2.柔性冲击:加速度有突变,因而推杆的惯性力也将有突变,不过这一突变为有限值,因而引起有限回程: s =h (1-δ/δ0ˊ) v =-h ω/δ0ˊ a =0图示为其推程运动线图。
由图可知,有刚性冲击。
(2)二次多项式运动规律(等加等减速运动规律) 推程增速段: s = 2h δ2/δ02v = 4h ωδ/δ02a = 4h ω2/δ02推程减速段: s = h -2h (δ0-δ)2/δ02v = 4h ω(δ0-δ)/ δ02 a = -4h ω2/δ2由图知,有柔性冲击。
(3)五次多项式运动规律其位移方程式为:s =54433561510δδδδδδhhh+- 既没有柔性冲击,也没有刚性冲击。
2.2 三角函数运动规律(1)余弦加速度运动规律(又称简谐运动规律) 推程运动方程式为⎪⎭⎪⎬⎫==-=200220002/)/cos(2/)/sin(2/)]/cos(1[δδπδωπδδπδωπδπδh a h v h s 回程运动方程式为⎪⎭⎪⎬⎫-=-=+=20022000'2/)'/cos('2/)'/sin(2/)]'/cos(1[δδπδωπδδπδωπδπδh a h v h s由图知,亦有柔性冲击,只是冲击的次数有所减少。
(2)正弦加速度运动规律(又称摆线运动规律) 推程运动方程式为⎪⎭⎪⎬⎫=-=-=20020000/)/2sin(2/)]/2cos(1[]2/)/2sin()/[(δδπδωπδδπδωπδπδδδh a h v h s回程运动方程式为⎪⎭⎪⎬⎫-=-=+-=20020000'/)'/2sin(2'/]1)'/2[cos(2/)'/2sin()'/(1[δδπδωπδδπδωπδπδδδh a h v h s由图知,既没有刚性冲击,也没有柔性冲击。
常见题型:1.(15分)设一对心直动尖顶推杆盘形凸轮机构推杆的行程16h mm =,推程运动角0120δ︒=。
试分别绘出等速运动规律、等加速等减速运动规律和余弦加速度运动规律在推程段的推杆位移线(s δ-)图;并简述该三种运动规律对凸轮机构产生的冲击情况;若凸轮以等角速度逆时针回转,基圆半径030r mm =,试以余弦加速度运动规律绘出在推程段的凸轮轮廓曲线。
(山科2009)2.(山科2010)3.(15分)如图6所示为凸轮机构推程阶段的运动线图。
设凸轮以等角速度ω转动,在推程时,凸轮的运动角为o δ,推杆完成行程h ,该推杆运动规律为哪一种运动规律?试推导出该推杆推程的运动方程,并分析受到的冲击情况。
图6(三)凸轮轮廓曲线的设计一、凸轮廓线设计方法的基本原理1.原理:反转法。
在设计凸轮廓线时,可假设凸轮静止不动,而使推杆相对于凸轮作反转运动,同时又在其导轨内作预期运动,作出推杆在这种复合运动中的一系列位置,则其尖顶轨迹就是所求的凸轮廓线。
一般步骤:(1)作出推杆在反转中依次占据的位置。
(2)根据选定的运动规律,求出推杆在预期运动中依次占据的位置。
(3)作出轮廓线。
二、用作图法设计凸轮轮廓1.对心直动尖顶推杆盘形凸轮机构已知:基圆半径,凸轮等ω逆时针转动,运动规律已知要求:设计一对心直动尖顶推杆盘形凸轮机构。
步骤:(1)画位移线图,并对其作等分。
(2)取适当比例尺,根据已知作出基圆。
(3)确定推杆在反转中占据的各位置(相应于运动线图对基圆作相应等分)(4)确定推杆尖顶在预期运动中占据的各位置。
(5)连接各点成光滑曲线。
2.偏置直动尖顶推杆盘形凸轮机构3.偏置直动滚子推杆盘形凸轮机构已知:基圆半径,滚子半径,凸轮等ω逆时针转动,运动规律已知要求:设计一偏置直动滚子推杆盘形凸轮机构。
★说明:(1)理论轮廓线:滚子中心的轨迹线。
(2)实际轮廓线:与滚子直接接触的凸轮轮廓曲线,又称工作廓线。
(3)凸轮的基圆半径是指理论廓线的基圆半径。
4.对心直动平底推杆盘形凸轮机构已知:基圆半径,凸轮等ω逆时针转动,运动规律已知。
要求:设计一对心直动平底推杆盘形凸轮机构。
图5.18所示为对心直动平底从动件盘形凸轮机构,其设计基本思路与上述滚子从动件盘形凸轮机构相似。
轮廓曲线具体作图步骤如下:取平底与从动件轴线的交点A当作从动件的尖顶,按照上述尖顶从动件盘形凸轮轮廓曲线的设计方法,求出该尖顶反转后的一系列位置A1、A2、…、A15;然后过点A1、A2、…、A15作一系列代表平底的直线,则得到平底从动件在反转过程中的一系列位置,再作这一系列位置的包络线即得到平底从动件盘形凸轮的实际轮廓曲线。
5.摆动尖顶推杆盘形凸轮机构已知:基圆半径,位移曲线,摆杆长,机架距OA。
要求:作一摆动尖顶推杆盘形凸轮机构。
分析:要注意到这儿的位移曲线的位移是指角度。
(四)凸轮机构的基本尺寸的确定一、凸轮机构的压力角及其校核1.压力角:推杆在与凸轮接触点处所受正压力的方向(接触点法线方向)与该点速度方向之间的锐角。
2压力角的数学表达式的推导(要会推导):正确偏置:导路位于与凸轮旋转方向ω相反的位置。
(即逆转右偏,顺转左偏)注意:用偏置法可减小推程压力角,但同时增大了回程压力角, 故偏距 e 不能太大。
3.凸轮基圆半径的确定对于偏置尖顶直动从动件盘形凸轮机构,如果限制推程的压力角α≤[α], 则可由式压力角的公式导出基圆半径的计算公式为提问:在设计一对心凸轮机构时,当出现α≥[α] 的情况,在不改变运动规律的前提下,可采取哪些措施来进行改进?1)加大基圆半径r 0 :r 0↑ →α↓ 2)将对心改为正偏置:e ↑ →α↓ 3)采用平底从动件,α=0 4滚子半径的确定对于外凸轮廓,要保证正常工作,应使:ρmin > r r 第一类:直动尖顶从动件偏心圆凸轮机构1.如图所示,有一对心直动尖顶从动件偏心圆凸轮机构,O 为凸轮几何中心,O 1为凸轮转动中心,直线AC ⊥BD ,O 1O =12OA ,圆盘半径R = 60 mm 。
试根据上述条件确定基圆半径r0、行程h,C 点压力角α c 和D 点接触时的位移hD 、压力角α D 。
(要求在图中画出并同时计算出)220)][/(e s tg ed ds r +--≥αδ解:(1)r O A0130==mm ;(2)h OC O A=-=1160mm ;(3)αC=0 ;(4)h OO OD O AD=+-=12213708.mm(5)αDO OOD==arctg().126572 图(a)所示对心直动尖底从动件偏心圆盘凸轮机构,O为凸轮几何合中心,O1为凸轮转动中心,直线AC⊥BD,O1O=OA/2,圆盘半径R=OA=60mm。
(1)根据图(a)及上述条件确定基园半径r0,行程h,C点压力角αc和D点接触时的压力角αD,位移hD;(2)若偏心圆盘凸轮几何尺寸不变,仅将从动件由尖底改为滚子,见图(b),滚子半径rT=10mm。
试问,上述参数r0,h,αc,和hD,αD是否改变?对于有改变的参数试分析其增大还是减小?3.一偏置直动尖顶推杆盘形凸轮机构如图所示。
已知凸轮为一偏心圆盘,圆盘半径R=30mm,几何中心为A,回转中心为O,推杆偏距OD=e=10mm,OA=10mm,凸轮以等角速度ω逆时针方向转动。
当凸轮在图示位置,即AD⊥CD时,试求:(1)凸轮的基圆半径r0;(2)图示位置的凸轮机构压力角α;(3)图示位置的凸轮转角φ;(4)图示位置的推杆的位移s;(5)该凸轮机构中的推杆偏置方向是否合理,为什么?河北工业2012 第二类:滚子从动件盘形凸轮机构2图示为对心直动滚子从动件盘形凸轮机构,凸轮为一偏心圆盘。
已知圆盘半径40=R mm ,该圆盘的回转中心与几何中心间的距离AO =25mm ,滚子半径r r =10 mm 。
试求:(1)该凸轮的基圆半径 r 0; (2)从动件的行程h ; (3)推程中的最大压力角αmax(4)推程压力角为最大时所对应的从动件的位移 s 为多少?(1)求r 0 即凸轮理论轮廓曲线的最小向径 理论轮廓曲线η 连接OA 并延长交η于C 点,AC l 即为理论廓线上的最小向径mm l l r OA OC 2525)1040(0=-+=-=(2)从动件升程即上升的最大距离,为η的最大和最小向径之差Bαmm r r l h T OA 5025104025)(0=-++=-++=γ(3)OA 水平时出现最大压力角,5.05025sin max ===OB AO l l α 0m a x 30=α (4)3252/3=⨯=OB ABl l mm S 3.18)102540(325=+--=对于图 (a)所示的凸轮机构,要求: (1)写出该凸轮机构的名称; (2)在图上标出凸轮的合理转向。