1
ss 0.5s1 s
解:1)调整K
G0 s
ss
1
0.5s1
s
Kv
lim
s0
G0
s
K
5s 1
2)作未校正系统的Bode图
G1 jω
jω1
5
j0.5ω1
jω
ωc 2.15,γ 20
系统不稳定
2023/12/21
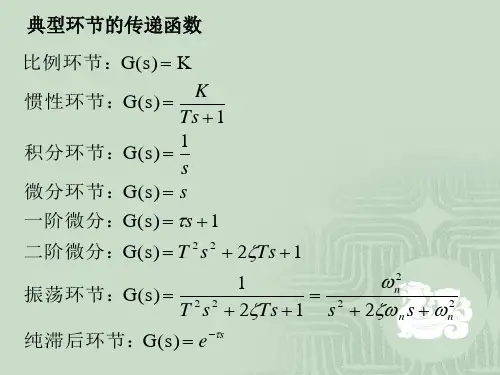
第六章 控制系统的校正
15
自动控制理论
3)选择新的ωc
φ 180 γ ε 180 40 12 128
系数Kv=20s-1,r=50°,20lgKg=10dB
解:
令Gc s
K c
1 Ts
1 Ts
K
1 Ts
1 Ts
1)调整开环增益K,满足Kv的要求
校正前开环传递函数为
G1 s
KG0 s
4K
ss 2
Kv
lim
s0
s4K
ss 2
2K
20 ,
K
10
校正前系统的开环频率特性为
2023/12/21
G1 jω
K v
2s1
2023/12/21
第六章 控制系统的校正
图6-9
4
自动控制理论
2)确定希望的闭环极点
由ωn 4, ξ 0.5,求得sd 2 j2 3,
3)计算超前校正装置在sd处产生的超前角
arg
4
ss
2
ssd
210
超前角: φ 30
4)确定超前校正装置的零、极点
根据θ 60 ,φ 30 ,求得γ 45.按最大α值的设计法,由图解得
基于频率法的滞后-超前校正