电容式动态张力传感器的研究与设计
- 格式:pdf
- 大小:85.13 KB
- 文档页数:3
引言硅压力传感器具有精度高、稳定性好等优点,在工业中广泛应用。
但是,由于硅材料本身的限制,使其无法用于高温和腐蚀等特殊环境中。
而陶瓷电容式压力传感器采用特殊陶瓷材料制作,具有抗腐蚀、耐高温等优点,弥补了硅压力传感器的上述缺点,可用于高温、腐蚀等特殊环境下。
现今,国内有大量的需求,但是还没有国内厂家能够生产。
因此,开发出一种实用的陶瓷压力传感器具有非常重要的现实意义。
陶瓷压力传感器通常采用多电容结构,在陶瓷膜片上同时烧结两个电容,一个作为参考电容,以消除温度对传感器输出的影响;另一个为测量电容,其变化量与传感器所受压力的变化量近似成正比,通过检测变化量就能得到传感器所受的压力。
沈阳大学课程设计- 1 -1 电容式传感器设计的目的与任务1.1电容式传感器设计的目的⑴巩固所学知识,加强对传感器原理的进一步理解;⑵理论与实际相结合,“学以致用”;⑶综合运用知识,培养独立设计能力;⑷着重掌握典型传感器的设计要点,方法与一般过程;⑸培养学生精密机械与测控电路的设计能力。
1.2电容式传感器设计的要求⑴设计时必须从实际出发,综合考虑实用性、经济性、安全性、先进性及操作维修方便。
如果可以用比较简单的方法实现要求,就不必过分强调先进性。
并非是越先进越好。
同样,在安全性、方便性要求较高的地方,应不惜多用一些元件或采用性能比较好的元件,不能单纯考虑简单、经济;⑵独立完成作业。
设计时可以收集、参考传感器同类资料,但必须深入理解,消化后再借鉴。
不能简单地抄袭;⑶在课程设计中,要随时复习传感器的工作原理。
积极思考。
不能直接向老师索要答案和图纸。
⑷设计传感器测头机械机构方案,绘制总装图(CAD为工具),编写传感器设计说明书。
沈阳大学课程设计- 2 -沈阳大学课程设计 - 3 -2 传感器设计方案的选择设计一台电容式传感器 设计要求如下: ⑴量程范围:0~25Mpa ⑵工作电压 5V ⑶相应时间 <1ms ⑷稳定性 <0.2% ⑸温度范围 -40~125℃ ⑹抗绝缘性 >2KV ⑺相对误差 1% ⑻张力 S=100×106N/m一种测量介质介电常数变化的电容式传感器结构如图。
一种张力传感器弹性体结构设计与分析摘要:为提高张力传感器标定测试精度,设计一种十字梁张力传感器的弹性体,对其力学性能进行分析。
首先,根据弹性体结构特点建立力学模型,对弹性体进行受力分析,求解出弹性体基本结构参数。
其次,对弹性体进行有限元分析,对弹性体结构参数进行验证并优化。
最后,通过样机试验证明了弹性体结构设计的合理性,为提高张力传感器标定测试精度奠定了基础关键词:多路输出力矩传感器弹性体有限元0引言张力传感器广泛应用于航天、航空及机器人领域,用于检测机械臂末端执行动作时的所受张力载荷,为力控系统提供载荷信息,从而完成规定复杂、精细动作。
张力传感器的标定测试精度是影响机械臂末端执行器控制精度和智能化的重要因素,弹性体结构作为提供力感信息的核心部件,其结构和尺寸设计非常重要。
本文通过理论分析和有限元仿真计算,对张力传感器的弹性体进行分析与优化设计。
1弹性体设计1.1弹性体结构设计弹性体为十字梁式结构,中间应变梁横向两侧为应变溅射面,用于敏感丝栅的溅射。
中心圆柱体结构(刚度较高的硬质中心)为力传导机构,圆柱体下端为十字梁结构。
当中间圆柱结构受到载荷作用,中间圆柱体产生沿着自身轴向方向的位移,并使十字梁发生弯曲变形,故该传感器为正应力型传感器。
十字梁式弹性体具有结构简单、外形体积小、重量轻、灵敏度高(利用量的弯曲应力,较小的载荷就可以产生较大的应变)、设计与制造比较简单等优点。
图5中L为弹性体有效直径,P为额定载荷,h为应变梁厚度,b为应变梁宽度。
图1 力矩传感器弹性体结构图1.2弹性体力学模型由于十字应变梁的的周边和中间圆柱体的刚度远远大于应变梁的刚度,因此在力学分析中可以把每根应变梁看成是双固支点梁,其受力分析和梁的弯矩图及梁上表面的应力图如图6所示。
图2 弹性体力学模型参考图2弹性体力学模型建立弹性体弯矩M、弯曲应力σ、弯曲应变ε和灵敏度S的关系,具体关系如公式(1)~(5)所示。
矩形的弯曲截面系数记作W,则式中,P 为外载荷,L 为应变梁有效长度,b 为应变梁宽度,h 为应变梁厚度,E 为弹性体材料的弹性模量,K 为应力计算系数,K=2。
电容传感器动态特性实验报告电容传感器动态特性实验报告引言:电容传感器是一种常见的传感器,广泛应用于工业自动化、仪器仪表、医疗设备等领域。
了解电容传感器的动态特性对于优化传感器的工作性能和提高测量精度具有重要意义。
本实验旨在通过实际操作和数据分析,研究电容传感器的动态特性。
实验装置:本次实验所使用的电容传感器为平行板电容传感器。
实验装置包括电容传感器、信号发生器、示波器、数据采集卡等设备。
实验步骤:1. 连接电路:将信号发生器的输出端与电容传感器的输入端相连,将示波器的输入端与电容传感器的输出端相连,使用数据采集卡将示波器的输出信号记录下来。
2. 设置信号参数:通过信号发生器设置不同的频率和幅值,以模拟实际工作环境下的电容传感器。
3. 数据采集:使用数据采集卡记录示波器输出信号的振幅和相位差。
4. 数据分析:根据采集到的数据,分析电容传感器的动态特性,包括频率响应、幅频特性、相频特性等。
实验结果与分析:1. 频率响应:通过改变信号发生器的频率,记录示波器输出信号的振幅变化。
实验结果显示,电容传感器的输出信号随着频率的增加而逐渐减小,说明电容传感器在高频率下的灵敏度较低。
2. 幅频特性:保持信号发生器的频率不变,改变信号发生器的幅值,记录示波器输出信号的振幅变化。
实验结果显示,电容传感器的输出信号随着信号幅值的增加而线性增加,但当信号幅值达到一定值后,电容传感器的输出信号增加速度变慢,出现饱和现象。
3. 相频特性:通过改变信号发生器的频率,记录示波器输出信号的相位差变化。
实验结果显示,电容传感器的输出信号相位差随着频率的增加而逐渐增大,说明电容传感器的相位响应较慢。
实验讨论:1. 频率响应与幅频特性:电容传感器的频率响应和幅频特性受到传感器自身特性和外部环境的影响。
传感器本身的结构和材料会影响传感器的频率响应和幅频特性,而外部环境的温度、湿度等因素也会对传感器的动态特性产生影响。
2. 相频特性:电容传感器的相频特性与传感器的响应速度有关。
2005年第24卷第10期 传感器技术(Jou rna l of T ransduce r Technology)电容式微位移传感器设计及其应用研究孙立宁,晏祖根(哈尔滨工业大学机器人研究所,黑龙江哈尔滨150001)摘 要:介绍了基于误差补偿的机器人系统原理,采用等电位环和驱动屏蔽电缆技术,设计了电容式微位移传感器及其信号调理电路。
该电路包括改进型的电容运算放大器检测电路、精密全波整流电路和滤波电路等。
试验结果表明:该电容式传感器的分辨力优于0.1μm,全量程非线性度小于0.2%;利用该电容式传感器测试偏摆误差,并进行偏摆误差补偿,机器人的性能得到提高。
关键词:电容式传感器;信号调理电路;微位移测量;机器人中图分类号:TP212 文献标识码:B 文章编号:1000-9787(2005)10-0013-03Design of capacit ance m i cro-d is p l ace m ent sensor and its applicati onSUN Li-ning,YAN Zu-gen(Rob otic Inst,H arb i n In st itu te of Techn ol ogy,H arb i n150001,Ch ina)Ab stract:T he principle o f t he robot sy ste m ba sed on erro r co m pensa tion is presented.The m icro-displace m en tcapacit ance sens o r and its si gna l conditioni ng circuit are desi gned by adopti ng equ i po t enti a l annulus techno logyand dr i v i ng cab le techno logy.Experi menta l re s u lts s how t ha t t he sensor’s non linearit y o f0.2%and reso l u tion o f0.1μm can be achieved.The dev i a tion of t he robo t sy st em is test ed and compensated u sing capacitance senso r,and t he perfor m ance o f the robot is i m proved.K ey word s:capacitance senso r;si gna l cond itioning c ircuit;m icro-displace m en tm easurem en t;robo t0 引 言随着机器人的广泛应用和发展,人们不断追求高速高精度、大行程机器人,基于伺服电机+滚珠丝杠驱动、光栅位置反馈的XY-T ab l e型机器人是其一种。
电容式传感器湖南工业大学科技学院电气0801班23号刘超摘要:电子技术的发展,解决了电容式传感器存在的许多技术问题,使电容式传感器不但广泛应用于精确测量位移、厚度、角度、振动等物理量,还应用于测量力、压力、差压、流量、成分、液位等参数,在自动检测与控制系统中也常常用来作为位置信号发生器。
Abstract:The development of electronic technology, capacitive sensor existence solve many of the technical problem, make capacitive sensor not only widely used in accurate measurement of the displacement, thickness, Angle, vibration, etc, also used in measuring physical force, stress and pressure, flow, composition, liquid level, the parameters such as in the automatic detection and control system is also often used to as position signal generator。
1 电容式传感器的工作原理和结构形式1.1电容式传感器的工作原理电容式传感器是一个具有可变参量的电容器,将被测非电量变化成为电容量。
多数情况下,电容式传感器是指以空气为介质的两个平行金属极板组成的可变电容器。
由两平行极板组成一个电容器,若忽略其边缘效应,则它的电容量可用下式表示C= єS/δ= є0єr S/δ式中 S ——极板相互遮盖面积(m2);δ——两平行板间距离(m);єr ——极板间介质的相对介电常数;电容式传感器结构є0 ——真空的介电常数(8.85×10-12F/m)。
电容式传感器电路设计及非接触测量技术优化随着科技的不断发展,电感式传感器已经成为现代工业和生活中广泛使用的测量技术。
电容式传感器是其中一种常见的测量技术,它利用电容的变化来实现对物理量的测量。
本文将详细介绍电容式传感器电路的设计原理及非接触测量技术的优化。
电容式传感器电路的设计原理电容式传感器基于电容量的测量原理。
电容是一种储存电荷的元件,它由两个带电板之间的电介质隔开。
当电介质发生变化时,电容的值就会发生变化。
因此,通过测量电容的变化,我们可以间接地测量电容器所测量的物理量。
在电容式传感器电路的设计中,有两种常见的方案。
一种是采用可变电容器,在测量物理量时调整电容的值。
另一种是采用固定电容器,通过改变电介质的特性来改变电容的值。
对于第一种方案,电容式传感器电路会将可变电容器的电容值转换为与被测量物理量相关的电信号。
这个电信号可以是电压、电流或频率的改变。
其中,最常见的是采用电压变换的方式。
通过电压传感器来测量电容的变化可以更加稳定和精确。
对于第二种方案,电容式传感器电路通过改变电介质的特性来改变电容的值。
例如,采用柱状固定电容器,通过改变柱状电介质的长度或直径来改变电容的值。
这种方案在一些特殊应用中具有优势,例如在液位测量中可以采用液位高度来改变电容的值。
非接触测量技术的优化非接触测量技术在电容式传感器中起着重要的作用。
它通过无需物理接触的方式来测量被测量物理量,提高了使用安全性和可靠性。
下面将介绍一些优化非接触测量技术的方法。
首先,可以采用无线传输的方式来实现非接触测量。
例如,可以使用无线传感器网络(WSN)来进行数据传输。
这样可以避免传统有线连接带来的布线麻烦,提高了测量的灵活性和便利性。
其次,可以采用无源传感器的方式来实现非接触测量。
无源传感器不需要外部电源供电,而是通过采集环境中的能量来驱动传感器。
这样可以减少电池更换和维护的成本,提高了系统的可靠性和寿命。
另外,可以采用通信协议的优化来提高非接触测量技术的性能。
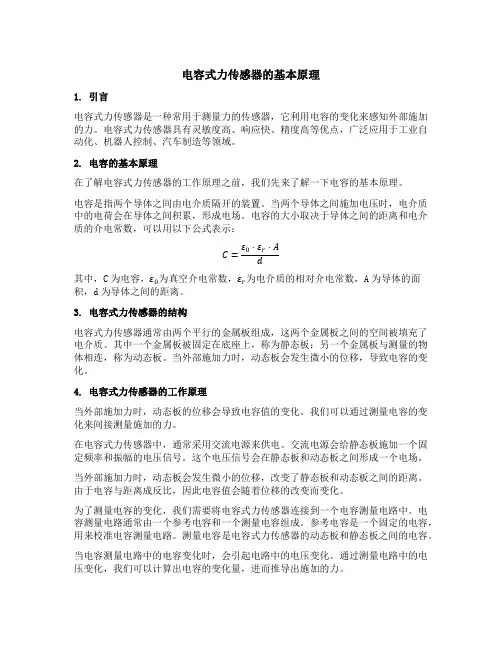
电容式力传感器的基本原理1. 引言电容式力传感器是一种常用于测量力的传感器,它利用电容的变化来感知外部施加的力。
电容式力传感器具有灵敏度高、响应快、精度高等优点,广泛应用于工业自动化、机器人控制、汽车制造等领域。
2. 电容的基本原理在了解电容式力传感器的工作原理之前,我们先来了解一下电容的基本原理。
电容是指两个导体之间由电介质隔开的装置。
当两个导体之间施加电压时,电介质中的电荷会在导体之间积累,形成电场。
电容的大小取决于导体之间的距离和电介质的介电常数,可以用以下公式表示:C=ε0⋅εr⋅Ad其中,C为电容,ε0为真空介电常数,εr为电介质的相对介电常数,A为导体的面积,d为导体之间的距离。
3. 电容式力传感器的结构电容式力传感器通常由两个平行的金属板组成,这两个金属板之间的空间被填充了电介质。
其中一个金属板被固定在底座上,称为静态板;另一个金属板与测量的物体相连,称为动态板。
当外部施加力时,动态板会发生微小的位移,导致电容的变化。
4. 电容式力传感器的工作原理当外部施加力时,动态板的位移会导致电容值的变化。
我们可以通过测量电容的变化来间接测量施加的力。
在电容式力传感器中,通常采用交流电源来供电。
交流电源会给静态板施加一个固定频率和振幅的电压信号。
这个电压信号会在静态板和动态板之间形成一个电场。
当外部施加力时,动态板会发生微小的位移,改变了静态板和动态板之间的距离。
由于电容与距离成反比,因此电容值会随着位移的改变而变化。
为了测量电容的变化,我们需要将电容式力传感器连接到一个电容测量电路中。
电容测量电路通常由一个参考电容和一个测量电容组成。
参考电容是一个固定的电容,用来校准电容测量电路。
测量电容是电容式力传感器的动态板和静态板之间的电容。
当电容测量电路中的电容变化时,会引起电路中的电压变化。
通过测量电路中的电压变化,我们可以计算出电容的变化量,进而推导出施加的力。
5. 电容式力传感器的特点电容式力传感器具有以下特点:•灵敏度高:电容式力传感器能够感知微小的力,具有较高的灵敏度。
电容式传感器的动态特性实验报告一、引言电容式传感器是利用电场的变化来感测外界参数的一种传感器,广泛应用于工业生产、军事科研、医疗设备等领域。
本次实验旨在探究电容式传感器的动态特性,了解其响应时间、误差等参数,以此加深对传感器的理解和应用。
二、实验原理电容式传感器是一种基于电容原理的传感器,通常由两个导电板和介质组成。
当传感器测量的物理量发生变化时,介质的电容性质发生变化,电容值也会随之改变。
在本次实验中,我们使用的是基于压电陶瓷的电容式传感器。
这种传感器的结构类似于普通电容式传感器,但是介质是压电陶瓷,可以将物理参数的变化转化为电容值的变化。
实验中测量的物理量是压电陶瓷电容的电容值。
压电陶瓷电容与外界存在一定的机械耦合关系,当传感器遭受外力冲击时,电容值会发生变化。
通过测量电容值的变化,我们可以得到传感器的响应时间和误差等参数。
三、实验步骤1. 搭建实验电路。
将电容式传感器与电容传感器信号调理模块连接,然后将模块的输出信号连接至示波器。
2. 给传感器施加冲击。
运用手掌等方式对传感器进行外力冲击,记录传感器响应的示波器输出信号。
3. 重复多次测量,获得数据。
对传感器进行多次冲击测试,记录测得的数据,计算平均值、方差等参数。
4. 对数据进行分析。
根据实验获得的数据,分析得出传感器的响应时间、误差等参数。
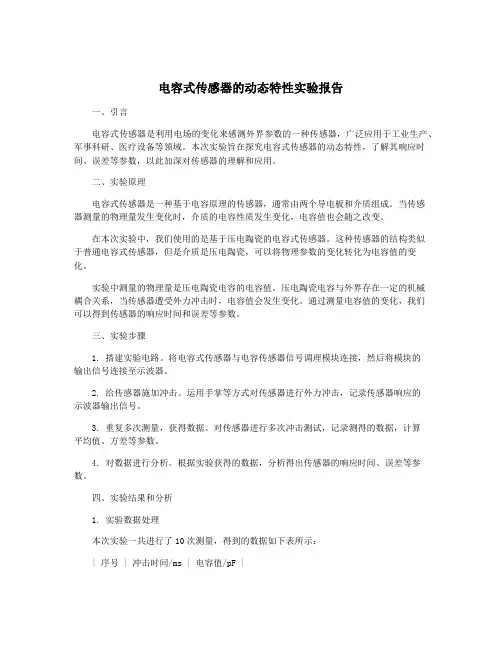
四、实验结果和分析1. 实验数据处理本次实验一共进行了10次测量,得到的数据如下表所示:| 序号 | 冲击时间/ms | 电容值/pF ||-----|------------|-----------|| 1 | 0.5 | 66.3 || 2 | 0.4 | 64.5 || 3 | 0.7 | 66.9 || 4 | 0.6 | 63.6 || 5 | 0.35 | 61.8 || 6 | 0.5 | 66.0 || 7 | 0.45 | 64.2 || 8 | 0.6 | 63.9 || 9 | 0.7 | 66.8 || 10 | 0.4 | 64.8 |根据以上数据,我们可以计算出传感器的平均响应时间和标准差:平均响应时间(τ)= 0.52 ms标准差(σ)= 0.12 ms(1)响应时间:从数据和计算结果可以看出,电容式传感器的响应时间较短,平均为0.52ms。
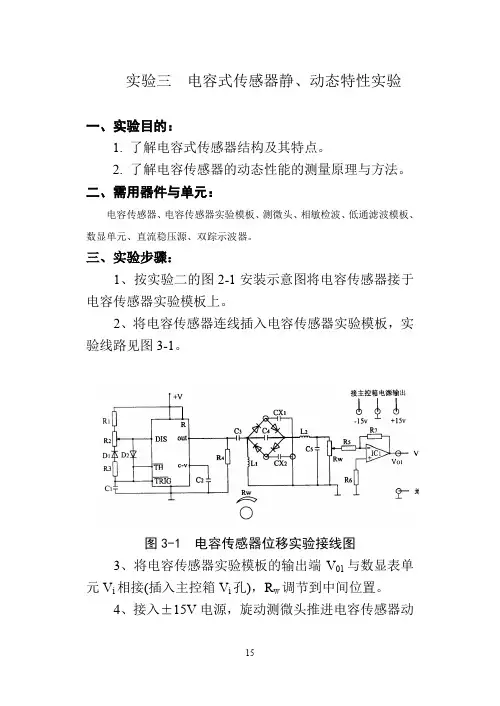
实验三电容式传感器静、动态特性实验一、实验目的:1. 了解电容式传感器结构及其特点。
2. 了解电容传感器的动态性能的测量原理与方法。
二、需用器件与单元:电容传感器、电容传感器实验模板、测微头、相敏检波、低通滤波模板、数显单元、直流稳压源、双踪示波器。
三、实验步骤:1、按实验二的图2-1安装示意图将电容传感器接于电容传感器实验模板上。
2、将电容传感器连线插入电容传感器实验模板,实验线路见图3-1。
图3-1 电容传感器位移实验接线图3、将电容传感器实验模板的输出端V01与数显表单元V i相接(插入主控箱V i孔),R w调节到中间位置。
4、接入±15V电源,旋动测微头推进电容传感器动极板位置,每间隔0.2mm记下位移X与输出电压值,填入表3-1。
5、根据表3-1的数据计算电容传感器的系统灵敏度S和非线性误差δf。
6、传感器安装图同实验二图2-1,按图3-1接线。
实验模板输出端V01 接滤波器输入端。
滤波器输出端V,接示波器一个通道(示波器X轴为20ms/div、Y轴示输出大小而变)。
调节传感器连接支架高度,使V01输出在零点附近。
7、主控箱低频振荡器输出端与振动源低频输入相接,振动频率选6~12Hz之间,幅度旋钮初始置0。
8、输入±15V电源到实验模板,调节低频振荡器的频率与幅度旋钮使振动台振动幅度适中,注意观察示波器上显示的波形。
9、保持低频振荡器幅度旋钮不变,改变振动频率,可以用数显表测频率(将低频振荡器输出端与数显Fin输入口相接,数显表波段开关选择频率档)。
从示波器测出传感器输出的V01峰-峰值。
保持低频振荡器频率不变,改变幅度旋钮,测出传感器输出的V01峰-峰值。
四、思考题:1、试设计利用ε的变化测谷物湿度的传感器原理及结构?能否叙述一下在设计中应考虑哪些因素?2、为了进一步提高电容传器灵敏度,本实验用的传感器可作何改进设计?如何设计成所谓容栅传感器?3、根据实验所提供的电容传感器尺寸,计算其电容量C O和移动0.5mm时的变化量,(本实验外圆半径R=8mm,内圆柱外半径r=7.25mm,外圆筒与内圆筒覆盖部分长度1=16mm。
电容式传感器应用与发展姓名(系09级自动化专业,0905075015)摘要:随着传感器不断的发展与成熟,电容式传感器广泛应用于压力、液位、位移等各种检测中,在农业、工业等领域的发展作出突出贡献。
电容式传感器作为一项前途广阔的新型技术,日益受到人们的重视。
关键词:电容传感器粮食水分液位前景0 引言电容传感技术投入应用已长达一个世纪,它具有结构简单、动态响应快、易实现非接触测量等突出的优点,具有着十分广泛的应用前景,它不仅在工业、农业、军事、环境、医疗等传统领域有具有巨大的运用价值,在未来还将在许多新兴领域体现其优越性。
1电容式传感器的应用1.1电容式传感器在农业上的应用在农业生产中,长期以来,粮食水分检测一直依靠手搓、嘴咬、眼观为主要的判别方法,人为影响很大。
但是国家在粮食收购过程中开始推行收购统一化、标准化,其中就包括粮食水分检测的标准化,因此设计一套粮食水分快速检测仪是十分必要的。
传统的电烘箱恒重法是利用电阻炉加热并根据失去的质量来测量粮食的含水量,因此可以实现粮食水分的在线测量,并可以作为其它水分仪标定的标准装置。
但它是一种间歇式的测量装置,测量周期较长,大约需要.40S,不能实现对粮食水分的连续测量,不利于提高控制指标。
在研究了粮食的导电浴盆效应的基础上提出了用电容式传感器测量粮食的水分。
这种方法把粮食作为电介质,通过测量粮食的介电常数来测量粮食的含水量。
由于用电容式传感器测量电容时,在电容两端还有一个并联的电导成分,因此总的变化是由电容(C)与电导(G)的比值来反映的,又由于C/G 的值与相角有确定的函数关系,因此只要测量出相角的值即可以测量出水分的含量。
用这种方法设计出的测量装置结构简单、成本低,并可以连续的在线测量。
在设计中采用电容式传感器作为测量器件。
该传感器是根据变介质型电容式传感器设计的。
被测粮食放入电容式传感器两极板间时,由于粮食的含水量不同,从而使电容式传感器的相对介电常数发生变化,即引起了电容值变化。