导线测量技术要求
- 格式:doc
- 大小:1006.50 KB
- 文档页数:46
3.3导线测量(Ⅰ)导线测量的主要技术要求3.3.1导线测量的主要技术要求说明如下:1随着全站仪在我国的普及应用,工程测量部门对中小规模的控制测量大部分采用导线测量的方法。
基于控制测量的技术现状和应用趋势的考虑,本规范修订时,维持《93规范》规范导线测量精度等级的划分和主要技术要求不变,将导线测量方法排列三角形网测量之前;导线测量的主要技术要求,是根据多数工程测量单位历年来实践经验、理论公式估算以及规范的科研课题试验验证,基于以下条件确定的。
1)三、四等导线的测角中误差采用同等级三角形网测量的测角中误差值;2)导线点的密度应比三角形网密一些,故三、四等导线的平均边长采用同等级三角测量平均边长的0.7倍左右(参见3.3.3条文说明);3)测距中误差是按常用电磁波测距仪器标称精度的估算值,特别是近年来电磁波测距仪器的精度都相应提高,该指标是容易满足的;4)设计导线时,中间最弱点点位中误差采用50mm;起始误差和测量误差对导线中点的影响按“等影响”处理。
2关于导线的总长限差说明:对于导线中点(最弱点)即有:最弱点点位中误差:中点的测量误差又包含纵向误差和横向误差两部分,即有:附合与高级点间的等边直伸导线,平差后中点纵横向误差可按下列公式计算:(3.6)(3.7)式中:n 为导线边数,〔S〕为导线总长。
则,所求的导线长度的理论公式为:(3.8)分别将各等级的、S及值代入式(3.8),解出[S],即得导线长度。
3关于相对闭合差限差的说明:理论和计算证明,中点和终点的横向误差比值约为1:4,纵向误差和起始数据的误差比值为1:2。
则有,导线终点的总误差的理论公式为:(3.9)取2倍导线终点的总误差作为限值。
则,求导线相对闭合差公式为:(3.10)按1~3款计算,并适当取舍整理,得出导线测量的主要技术要求如规范表3.3.1。
以上导线测量的主要技术要求,与在某测区的试验报告所提指标基本相符合。
4关于测角仪器和测距仪器的分级与命名:由于工程测量规范的编写,一直沿用我国光学经纬仪的系列划分方法,即划分为DJ05、DJ1、DJ2、DJ6等。
3.3导线测量(Ⅰ)导线测量的主要技术要求3.3.1导线测量的主要技术要求说明如下:1随着全站仪在我国的普及应用,工程测量部门对中小规模的控制测量大部分采用导线测量的方法。
基于控制测量的技术现状和应用趋势的考虑,本规范修订时,维持《93规范》规范导线测量精度等级的划分和主要技术要求不变,将导线测量方法排列三角形网测量之前;导线测量的主要技术要求,是根据多数工程测量单位历年来实践经验、理论公式估算以及规范的科研课题试验验证,基于以下条件确定的。
1)三、四等导线的测角中误差采用同等级三角形网测量的测角中误差值;2)导线点的密度应比三角形网密一些,故三、四等导线的平均边长采用同等级三角测量平均边长的0.7倍左右(参见3.3.3条文说明);3)测距中误差是按常用电磁波测距仪器标称精度的估算值,特别是近年来电磁波测距仪器的精度都相应提高,该指标是容易满足的;4)设计导线时,中间最弱点点位中误差采用50mm;起始误差和测量误差对导线中点的影响按“等影响”处理。
2关于导线的总长限差说明:对于导线中点(最弱点)即有:最弱点点位中误差:中点的测量误差又包含纵向误差和横向误差两部分,即有:附合与高级点间的等边直伸导线,平差后中点纵横向误差可按下列公式计算:(3.6)(3.7)式中:n 为导线边数,〔S〕为导线总长。
则,所求的导线长度的理论公式为:(3.8)分别将各等级的、S及值代入式(3.8),解出[S],即得导线长度。
3关于相对闭合差限差的说明:理论和计算证明,中点和终点的横向误差比值约为1:4,纵向误差和起始数据的误差比值为1:2。
则有,导线终点的总误差的理论公式为:(3.9)取2倍导线终点的总误差作为限值。
则,求导线相对闭合差公式为:(3.10)按1~3款计算,并适当取舍整理,得出导线测量的主要技术要求如规范表3.3.1。
以上导线测量的主要技术要求,与在某测区的试验报告所提指标基本相符合。
4关于测角仪器和测距仪器的分级与命名:由于工程测量规范的编写,一直沿用我国光学经纬仪的系列划分方法,即划分为DJ05、DJ1、DJ2、DJ6等。
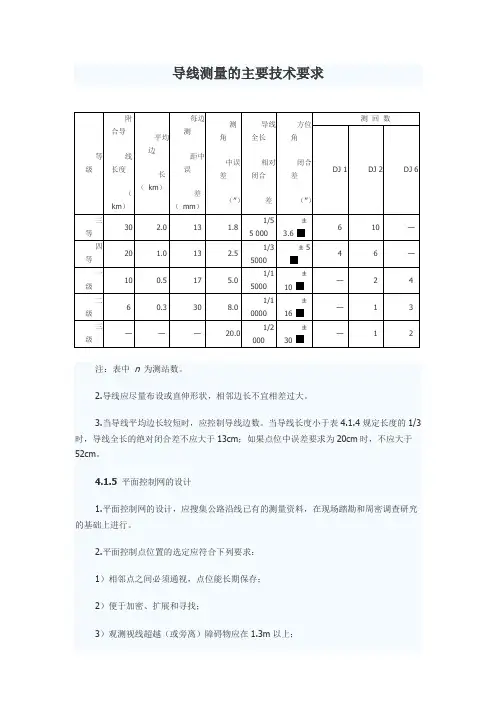
导线测量的主要技术要求注:表中n 为测站数。
2.导线应尽量布设或直伸形状,相邻边长不宜相差过大。
3.当导线平均边长较短时,应控制导线边数。
当导线长度小于表4.1.4规定长度的1/3时,导线全长的绝对闭合差不应大于13cm;如果点位中误差要求为20cm时,不应大于52cm。
4.1.5 平面控制网的设计1.平面控制网的设计,应搜集公路沿线已有的测量资料,在现场踏勘和周密调查研究的基础上进行。
2.平面控制点位置的选定应符合下列要求:1)相邻点之间必须通视,点位能长期保存;2)便于加密、扩展和寻找;3)观测视线超越(或旁离)障碍物应在1.3m以上;4)平面控制点位置应沿路线布设,距路中心的位置宜大于50m且小于300m,同时应便于测角、测距及地形测量和定测放线;5)路线平面控制点的设计,应考虑沿线桥梁、隧道等构造物布设控制网的要求。
在大型构造物的两侧应分别布设一对平面控制点。
4.1.6 水平角观测1.水平角观测应采用不低于DJ 6 型的经纬仪。
使用前应进行下列检验:1)照准部旋转轴正常,各位置气泡读数较差,DJ 1 型经纬仪不得超过两格;DJ 2 型不得超过一格。
2)光学测微器行差与隙动差,DJ 1 型经纬仪不得大于1″;DJ 2 型不得大于2″。
3)垂直微动螺旋使用时,视准轴在水平方向上不得产生偏移。
4)照准部旋转时,仪器底座位移所产生的系统误差,DJ 1 型经纬仪不得超过0.3″;DJ 6 型不得超过1.0″。
5)水平轴不垂直于垂直轴之差,DJ 1 型经纬仪不得超过10″;DJ2型不得超过15″;DJ 6 型不得超过20″。
6)光学对点器的对中误差不得大于1mm 。
2.水平角方向观测的作业要求:1)水平角观测方向数不多于3个时可不归零。
各测回应均匀地分配在度盘和测微器的不同位置上。
2)水平角方向观测应在通视良好、成像清晰稳定时进行。
全部测回宜在一个时间段内测完。
3)观测过程中,气泡中心位置偏离不得超过1格;气泡偏离接近1格时,应在测回间重新整置仪器。
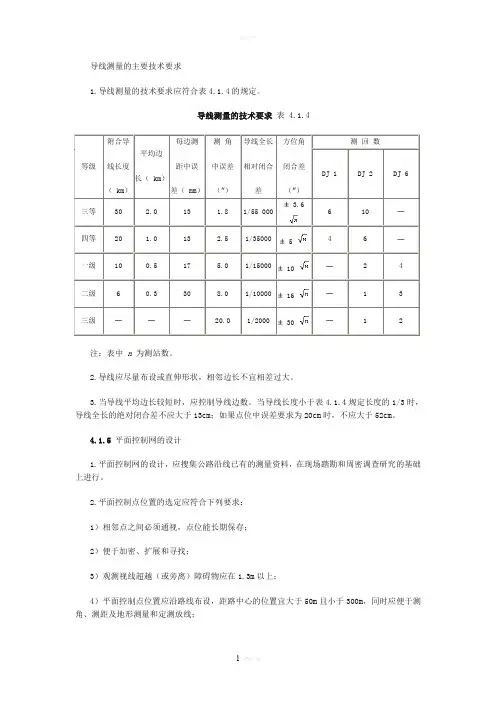
导线测量的主要技术要求1.导线测量的技术要求应符合表4.1.4的规定。
导线测量的技术要求表 4.1.45101630注:表中n 为测站数。
2.导线应尽量布设或直伸形状,相邻边长不宜相差过大。
3.当导线平均边长较短时,应控制导线边数。
当导线长度小于表4.1.4规定长度的1/3时,导线全长的绝对闭合差不应大于13cm;如果点位中误差要求为20cm时,不应大于52cm。
4.1.5 平面控制网的设计1.平面控制网的设计,应搜集公路沿线已有的测量资料,在现场踏勘和周密调查研究的基础上进行。
2.平面控制点位置的选定应符合下列要求:1)相邻点之间必须通视,点位能长期保存;2)便于加密、扩展和寻找;3)观测视线超越(或旁离)障碍物应在1.3m以上;4)平面控制点位置应沿路线布设,距路中心的位置宜大于50m且小于300m,同时应便于测角、测距及地形测量和定测放线;5)路线平面控制点的设计,应考虑沿线桥梁、隧道等构造物布设控制网的要求。
在大型构造物的两侧应分别布设一对平面控制点。
4.1.6 水平角观测1.水平角观测应采用不低于DJ 6 型的经纬仪。
使用前应进行下列检验:1)照准部旋转轴正常,各位置气泡读数较差,DJ 1 型经纬仪不得超过两格;DJ 2 型不得超过一格。
2)光学测微器行差与隙动差,DJ 1 型经纬仪不得大于1″;DJ 2 型不得大于2″。
3)垂直微动螺旋使用时,视准轴在水平方向上不得产生偏移。
4)照准部旋转时,仪器底座位移所产生的系统误差,DJ 1 型经纬仪不得超过0.3″;DJ 6 型不得超过1.0″。
5)水平轴不垂直于垂直轴之差,DJ 1 型经纬仪不得超过10″;DJ2型不得超过15″;DJ 6 型不得超过20″。
6)光学对点器的对中误差不得大于 1mm 。
2.水平角方向观测的作业要求:1)水平角观测方向数不多于3个时可不归零。
各测回应均匀地分配在度盘和测微器的不同位置上。
2)水平角方向观测应在通视良好、成像清晰稳定时进行。
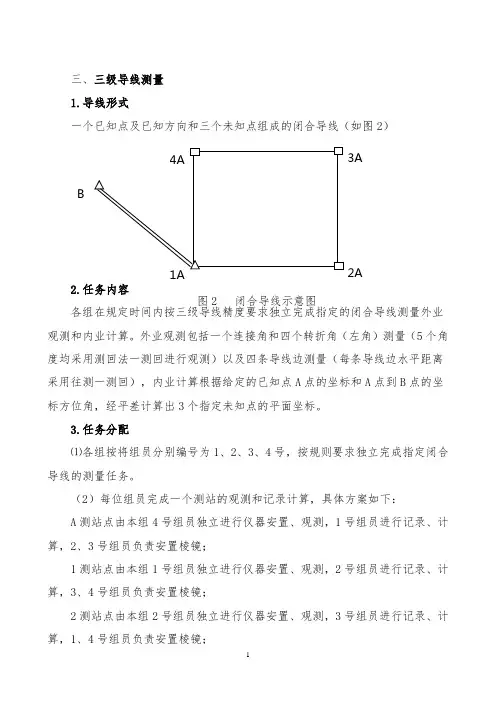
三、三级导线测量 1.导线形式一个已知点及已知方向和三个未知点组成的闭合导线(如图2)2.任务内容各组在规定时间内按三级导线精度要求独立完成指定的闭合导线测量外业观测和内业计算。
外业观测包括一个连接角和四个转折角(左角)测量(5个角度均采用测回法一测回进行观测)以及四条导线边测量(每条导线边水平距离采用往测一测回),内业计算根据给定的已知点A 点的坐标和A 点到B 点的坐标方位角,经平差计算出3个指定未知点的平面坐标。
3.任务分配⑴各组按将组员分别编号为1、2、3、4号,按规则要求独立完成指定闭合导线的测量任务。
(2)每位组员完成一个测站的观测和记录计算,具体方案如下: A 测站点由本组4号组员独立进行仪器安置、观测,1号组员进行记录、计算,2、3号组员负责安置棱镜;1测站点由本组1号组员独立进行仪器安置、观测,2号组员进行记录、计算,3、4号组员负责安置棱镜;2测站点由本组2号组员独立进行仪器安置、观测,3号组员进行记录、计算,1、4号组员负责安置棱镜;B 2A3A图2 闭合导线示意图3测站点由本组3号组员独立进行仪器安置、观测,4号组员进行记录、计算,1、2号选手负责安置棱镜。
(3)外业观测时水平角观测1测回,起始方向水平度盘须设置为0°01′12″附近,角度观测和计算单位取至秒;导线边水平距离测量1测回,读数3次(3次读数可以通过盘左、盘右分别观测得到,也可以只通过盘左或盘右观测得到),只进行往测,不进行返测,边长取至0.001m。
(4)数据记录要求记录规范完整、符合记录规定、计算准确;水平角观测数据不得改动秒值,度、分不得连环涂改(5)各组独立进行导线平差内业计算。
内业计算所用的闭合导线测量成果计算表(见附件表5),计算表的辅助计算栏中必须填入导线的方位角闭合差、坐标增量闭合差和导线全长相对闭合差。
(6)仪器操作应符合要求。
观测顺序按先测连接角,再分别按序号进行导线前进方向左角的测量。
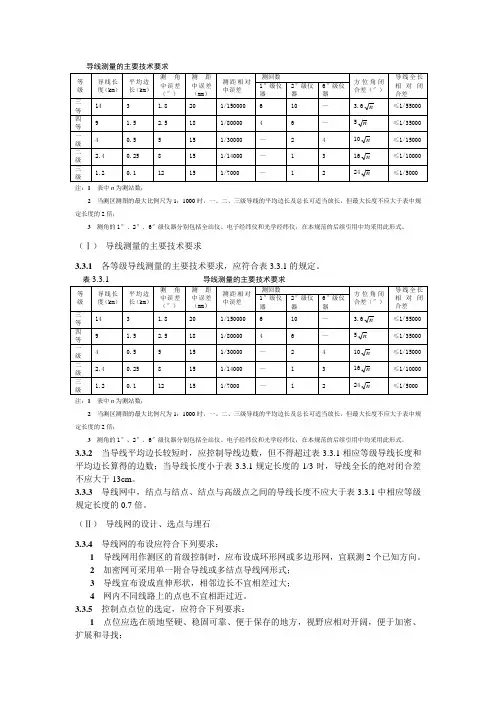
导线测量的主要技术要求注:1 表中n为测站数;2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的平均边长及总长可适当放长,但最大长度不应大于表中规定长度的2倍;3测角的1″、2″、6″级仪器分别包括全站仪、电子经纬仪和光学经纬仪,在本规范的后续引用中均采用此形式。
(Ⅰ)导线测量的主要技术要求3.3.1各等级导线测量的主要技术要求,应符合表3.3.1的规定。
表3.3.1导线测量的主要技术要求注:1 表中n为测站数;2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的平均边长及总长可适当放长,但最大长度不应大于表中规定长度的2倍;3测角的1″、2″、6″级仪器分别包括全站仪、电子经纬仪和光学经纬仪,在本规范的后续引用中均采用此形式。
3.3.2当导线平均边长较短时,应控制导线边数,但不得超过表3.3.1相应等级导线长度和平均边长算得的边数;当导线长度小于表3.3.1规定长度的1/3时,导线全长的绝对闭合差不应大于13cm。
3.3.3导线网中,结点与结点、结点与高级点之间的导线长度不应大于表3.3.1中相应等级规定长度的0.7倍。
(Ⅱ)导线网的设计、选点与埋石3.3.4导线网的布设应符合下列要求:1导线网用作测区的首级控制时,应布设成环形网或多边形网,宜联测2个已知方向。
2加密网可采用单一附合导线或多结点导线网形式;3导线宜布设成直伸形状,相邻边长不宜相差过大;4网内不同线路上的点也不宜相距过近。
3.3.5控制点点位的选定,应符合下列要求:1点位应选在质地坚硬、稳固可靠、便于保存的地方,视野应相对开阔,便于加密、扩展和寻找;2相邻点之间应通视良好,其视线距障碍物的距离,三、四等不宜小于1.5m;四等以下宜保证便于观测,以不受旁折光的影响为原则;3当采用电磁波测距时,相邻点之间视线应避开烟囱、散热塔、散热池等发热体及强电磁场;4相邻两点之间的视线倾角不宜太大;5充分利用旧有控制点。
3.3.6导线点埋石规格及埋设要求,见附录B。
导线测量规范Ⅰ导线测量的主要技术要求各等级导线测量的主要导线测量是一种用于测量导线长度和导线位置的技术手段,广泛应用于建筑、电力、通信等领域。
导线测量的主要技术要求包括测量精度、测量方法、测量仪器、影响测量精度的因素等。
在不同的等级导线测量中,还有一些特定的技术要求。
一、测量精度导线测量的首要要求是要求准确、可靠、可重复。
测量精度通常受到仪器精度和环境因素的影响。
因此,要选择适当的测量仪器,并提供合适的环境条件,确保测量结果的准确性。
二、测量方法导线测量有多种方法,包括直测法、差测法、反向测量法等。
不同的方法适用于不同的测量任务。
在测量过程中,要根据需要选择合适的测量方法,并进行相应的校准和修正。
三、测量仪器导线测量通常使用的仪器包括全站仪、平板仪、测量带等。
测量仪器的选择应根据测量任务的要求,选择精度高、功能全面的仪器。
在使用仪器时,要进行仪器的校准和定期检查,确保测量结果的准确性。
四、影响测量精度的因素导线测量的精度受到多种因素的影响,包括气象条件、地形条件、测量方法、仪器精度等。
在进行导线测量时,要充分考虑这些因素,进行相应的修正和校正,提高测量精度。
五、不同等级导线的特定要求不同等级的导线测量有一些特定的要求。
例如,在高精度导线测量中,要求使用高精度的仪器和测量方法,进行多次测量并取平均值,以提高测量精度。
而在一般等级导线测量中,要求采用较为简便的测量方法和仪器,考虑测量精度和测量成本的平衡。
综上所述,导线测量的主要技术要求包括测量精度、测量方法、测量仪器、影响测量精度的因素等。
在不同等级导线测量中,还有一些特定的要求。
通过合理选择测量方法和仪器,并进行相应的修正和校正,可以确保导线测量的准确性和可靠性。
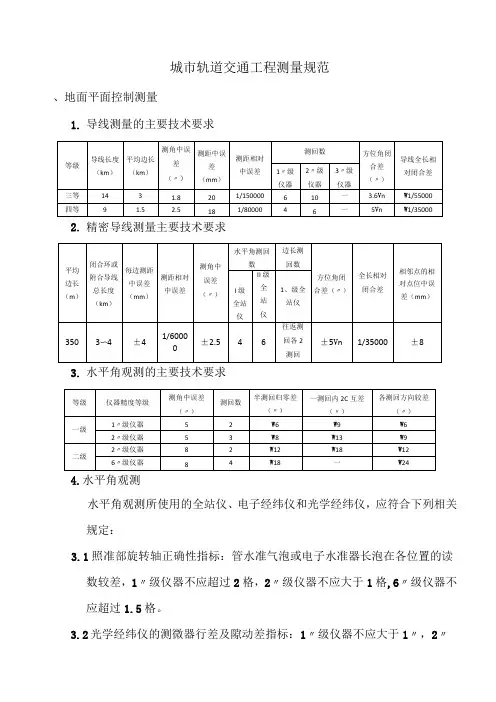
城市轨道交通工程测量规范、地面平面控制测量1.导线测量的主要技术要求2.精密导线测量主要技术要求3.水平角观测的主要技术要求4.水平角观测水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:3.1照准部旋转轴正确性指标:管水准气泡或电子水准器长泡在各位置的读数较差,1〃级仪器不应超过2格,2〃级仪器不应大于1格,6〃级仪器不应超过1.5格。
3.2光学经纬仪的测微器行差及隙动差指标:1〃级仪器不应大于1〃,2〃级仪器不应大于2〃。
3.3水平轴不垂直于垂直轴之差指标:1〃级仪器不应超过10〃,2〃级仪器不应超过15〃,6〃级仪器不应超过20〃。
3.4仪器的基座在照准部旋转时的位移指标:1〃级仪器不应超过0.3〃,2〃级仪器不应超过1〃,6〃级仪器不超过1.5〃。
3.5光学对中器的视轴与竖直的重合度不应大于1mm。
4.水平角方向观测法的技术要求二、地面高程控制测量水准测量的主要技术要求水准网测量的主要技术要求水准测量测站的视线长度、视距差、视线高度的要求(m)水准测量的测站观测限差(mm)各等水准测量的主要技术指标(mm)光电测距三角高程导线技术要求三、联系测量1.隧道贯通前的联系测量工作不少于3次,宜在隧道掘进到100m、300m以及距贯通面100〜200m时分别进行一次。
当地下起始方位角较差小于12〃时,可取各次测量成果的平均值作为后续测量的起算数据指导隧道贯通。
2.隧道内定向边边长应大于60m,视线距隧道边墙的距离应大于0.5m。
3.隧道内控制点间平均边长宜为150m。
曲线隧道控制点间距不应小于60m。
4.水准线路往返较差、附和或闭合差为土8V Lmm o5.水准测量应在隧道贯通前进行三次,并应与传递高程测量同步进行。
重复测量的高程点间的高程较差应小于5mm,满足要求时,应取逐步平均值作为控制点的最终成果指导隧道掘进。
四、暗挖隧道、车站施工测量1.地下施工高程测量采用水准测量方法,水准点宜每50m设置一个。
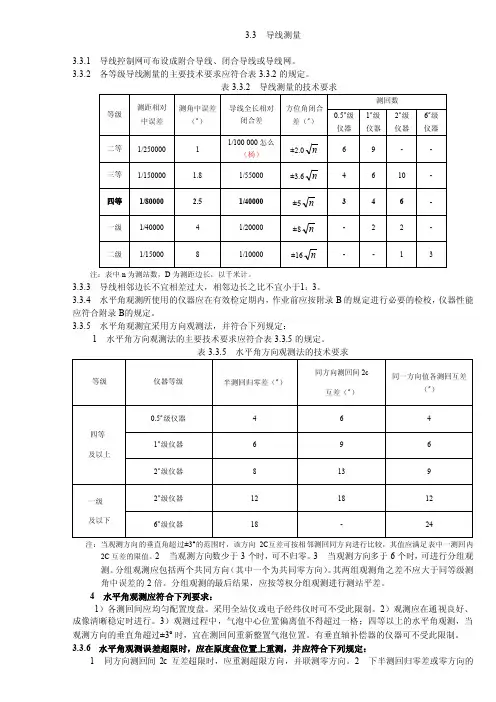
3.3 导线测量3.3.1 导线控制网可布设成附合导线、闭合导线或导线网。
3.3.2 各等级导线测量的主要技术要求应符合表3.3.2的规定。
表3.3.2 导线测量的技术要求等级测距相对中误差测角中误差(″)导线全长相对闭合差方位角闭合差(″)测回数0.5″级仪器1″级仪器2″级仪器6″级仪器二等1/250000 1 1/100 000怎么(杨)±2.0n 6 9 - -三等1/150000 1.8 1/55000±3.6n 4 6 10 -四等1/80000 2.5 1/40000±5n 3 4 6 -一级1/40000 4 1/20000±8n- 2 2 -二级1/150008 1/10000±16n- - 1 3注:表中n为测站数,D为测距边长,以千米计。
3.3.3 导线相邻边长不宜相差过大,相邻边长之比不宜小于1:3。
3.3.4 水平角观测所使用的仪器应在有效检定期内,作业前应按附录B的规定进行必要的检校,仪器性能应符合附录B的规定。
3.3.5 水平角观测宜采用方向观测法,并符合下列规定:1 水平角方向观测法的主要技术要求应符合表3.3.5的规定。
表3.3.5 水平角方向观测法的技术要求等级仪器等级半测回归零差(″)同方向测回间2c互差(″)同一方向值各测回互差(″)四等及以上0.5″级仪器 4 6 4 1″级仪器 6 9 6 2″级仪器8 13 9一级及以下2″级仪器12 18 12 6″级仪器18 - 24注:当观测方向的垂直角超过±3°的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
2 当观测方向数少于3个时,可不归零。
3 当观测方向多于6个时,可进行分组观测。
导线测量的主要技术要求导线测量是工程测量中一个重要的内容,其主要技术要求包括以下几个方面。
一、准确性要求:导线测量的主要目的是获取导线的准确位置和长度,因此测量结果必须具有高精度和高准确性。
准确性的要求主要包括两个方面,即距离准确性和角度准确性。
在导线距离测量中,应用高精度的仪器和技术手段,控制误差在可接受范围内,以确保测量结果的准确度。
在角度测量中,应用精密水平仪和全站仪等仪器,保证角度测量的准确度。
二、稳定性要求:导线测量需要在一段时间内持续进行,因此要求测量设备和仪器具有良好的稳定性。
测量设备的稳定性主要包括温度稳定性和时间稳定性。
温度稳定性要求仪器在不同温度条件下具有相对稳定的测量性能,避免温度变化对测量结果的影响。
时间稳定性要求仪器在长时间的测量过程中,其性能和测量结果具有良好的稳定性。
三、可靠性要求:导线测量往往在各种复杂的环境中进行,包括山区、水域、城市等不同的地形和地貌条件。
因此,导线测量的仪器和设备必须具有良好的可靠性和适应性。
仪器和设备应具备防水、防尘、抗震等功能,以确保在恶劣环境下测量的正常进行。
此外,仪器的操作性要求简单方便,使测量人员能够快速掌握并熟练操作。
四、经济性要求:导线测量涉及到大量的仪器和设备,以及人力和物力资源的投入。
在测量过程中,要求以最经济的方式完成测量任务。
在仪器设备选择上,要综合考虑准确性、稳定性和可靠性等因素,选择适合的测量仪器。
在测量方法选择上,要基于实际情况进行合理的规划和设计,以节约时间和成本。
五、安全要求:导线测量可能存在一定的危险性,如高空作业、水域测量等。
因此,要求测量人员具有一定的安全意识和防范意识,遵循相关的安全规范和要求。
在高空作业中,应使用安全防护设施,做好安全防护工作。
在水域测量中,必须配备救生设备,确保人员和仪器的安全。
此外,还要做好仪器的维护和保养工作,确保仪器的正常运行和使用安全。
综上所述,导线测量的主要技术要求包括准确性、稳定性、可靠性、经济性和安全性。
导线测量的主要技术要求(n)导线⽹的设计、选点与埋⽯ 3.3.43.3.51扩展和寻找;导线⽹的布设应符合下列要求:导线⽹⽤作测区的⾸级控制时,应布设成环形⽹或多边形⽹,宜联测加密⽹可采⽤单⼀附合导线或多结点导线⽹形式;导线宜布设成直伸形状,相邻边长不宜相差过⼤;⽹内不同线路上的点也不宜相距过近。
控制点点位的选定,应符合下列要求:点位应选在质地坚硬、稳固可靠、便于保存的地⽅,视野应相对开阔,2个已知⽅向。
便于加密、导线测量的主要技术要求电⼦经纬仪和光学经纬仪,在本规范的后续引⽤中均采⽤此形式。
(I )导线测量的主要技术要求3.3.1各等级导线测量的主要技术要求,表 3.3.1注:表中为测站数;2当测区测图的最⼤⽐例尺为 1 : 1000时,⼀、⼆、三级导线的平均边长及总长可适当放长,但最⼤长度不应⼤于表中规定长度的2倍;3测⾓的T 、2"、6级仪器分别包括全站仪、电⼦经纬仪和光学经纬仪,在本规范的后续引⽤中均采⽤此形式。
3.3.2当导线平均边长较短时,应控制导线边数,但不得超过表3.3.1相应等级导线长度和平均边长算得的边数;当导线长度⼩于表 3.3.1规定长度的1/3时,导线全长的绝对闭合差不应⼤于13cm 。
3.3.3导线⽹中,结点与结点、结点与⾼级点之间的导线长度不应⼤于表规定长度的0.7倍。
注:1表中n 为测站数;⼆、三级导线的平均边长及总长可适当放长,但最⼤长度不应⼤于表中规 2当测区测图的最⼤⽐例尺为 1:1000时,⼀定长度的2倍;3测⾓的T 、2"、6级仪器分别包括全站仪、应符合表 3.3.1的规定。
导线测量的主要技术要求3.3.1中相应等级2 相邻点之间应通视良好,其视线距障碍物的距离,三、四等不宜⼩于下宜保证便于观测,以不受旁折光的影响为原则;3当采⽤电磁波测距时,相邻点之间视线应避开烟囱、散热塔、散热池等发热体及强电磁场; 4相邻两点之间的视线倾⾓不宜太⼤; 5 3.3.6需要⽽定。
导线测量规范Ⅰ导线测量的主要技术要求各等级导线测量的主要Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】导线测量规范(Ⅰ)导线测量的主要技术要求注:1 表中n为测站数。
2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2 当导线平均边长较短时,应控制导线边数不超过表相应等级导线长度和平均边长算得的边数;当导线长度小于表规定长度的1/3时,导线全长的绝对闭合差不应大于13㎝。
3.3.3 导线网中,结点与结点、结点与高级点之间的导线段长度不应大于表中相应等级规定长度的倍。
(Ⅲ)水平角观测3.3.7 水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:1 照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过格。
2 光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3 水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4 补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5 垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6 仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过秒,2秒级仪器不应超过1秒,6秒级仪器不应超过秒。
7 光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8 水平角观测宜采用方向观测法,并符合下列规定:1 方向观测法的技术要求,不应超过表3.3.8的规定。
注;1 全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2 当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
测量工程师的导线测量规范要求与技术导线测量是测量工程师在测绘和土木工程中常用的技术之一。
它对于确保工程的精确性和稳定性至关重要。
本文将介绍测量工程师在导线测量中遵循的规范要求和技术。
一、导线测量概述导线测量是一种利用测量仪器和技术手段来确定地面点之间距离和方位关系的测量方法。
它通常用于测绘和土木工程中,以确定地面上各种建筑物、道路、桥梁、管线等的位置和相互关系。
二、测量工程师的职责作为测量工程师,对于导线测量有着重要的责任和职责。
首先,他们需要熟悉并遵守测量规范和标准。
其次,他们需要选择合适的测量仪器和技术手段,并确保其准确性和可靠性。
此外,测量工程师还需要分析和处理测量数据,提供准确的测量结果。
三、导线测量规范要求1. 精确性要求:导线测量需要达到一定的精确性,以确保工程的准确性。
根据不同的测量需求和工程标准,测量工程师需要确定测量的精度要求,并采取相应的措施来保证精确性。
2. 测量仪器要求:测量工程师应使用经过校准和验证的仪器设备,确保其精确性和准确性。
他们还需要了解不同仪器的使用方法和操作技巧,以及对仪器进行常规维护和校准的要求。
3. 测量技术要求:导线测量可以使用多种技术手段,如全站仪、电子经纬仪、全球定位系统(GPS)等。
测量工程师需要根据实际情况选择合适的技术,并熟悉其操作和应用要点。
4. 数据处理要求:导线测量产生的数据需要进行处理和分析,以获得准确的测量结果。
测量工程师需要熟悉测量数据的处理方法和软件,确保数据的质量和准确性。
四、导线测量技术1. 导线布设:在进行导线测量前,测量工程师需要进行导线布设,确定测量线路和测量点。
布设过程需要根据工程要求,考虑地形地貌和测量精度要求,合理选择点位和线路,并做好标记。
2. 角度测量:角度测量是导线测量中的关键环节。
测量工程师可以使用全站仪等仪器进行角度测量。
在进行测量前,需要校准仪器,并选择合适的测量方法和参考点,以确保角度测量的准确性。
导线测量规范(I)导线测量的主要技术要求各等级导线测量的主要技术要求,应符合表3.3.1的规定。
2当测区测图的最大比例尺为1 : 1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
332当导线平均边长较短时,应控制导线边数不超过表 3.3.1相应等级导线长度和平均边长算得的边数;当导线长度小于表 3.3.1规定长度的1/3时,导线全长的绝对闭合差不应大于13 cm o3.3.3导线网中,结点与结点、结点与高级点之间的导线段长度不应大于表331中相应等级规定长度的0.7倍。
(川)水平角观测3.3.7水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:1照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过1.5格。
2光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过0.3秒,2秒级仪器不应超过1秒,6秒级仪器不应超过 1.5秒。
7光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1伽。
3.3.8水平角观测宜采用方向观测法,并符合下列规定:1方向观测法的技术要求,不应超过表 3.3.8的规定。
注;1全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2当观测方向的垂直角超过土3°的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
2当观测方向不多于3个时,可不归零。
城市轨道交通工程测量标准、地面平面限制测量1.导线测量的主要技术要求2.精密导线测量主要技术要求3.水平角观测的主要技术要求4.水平角观测水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合以下相关规定:3.1照准部旋转轴正确性指标:管水准气泡或电子水准器长泡在各位置的读数较差,1〃级仪器不应超过2格,2〃级仪器不应大于1格,6〃级仪器不应超过1.5格.3.2光学经纬仪的测微器行差及隙动差指标:1〃级仪器不应大于1〃,2〃级仪器不应大于2〃.3.3水平轴不垂直于垂直轴之差指标:1〃级仪器不应超过10〃,2〃级仪器不应超过15 〃,6〃级仪器不应超过20 〃.3.4仪器的基座在照准部旋转时的位移指标:1〃级仪器不应超过0.3〃,2〃级仪器不应超过1〃,6〃级仪器不超过1.5 〃.3.5光学对中器的视轴与竖直的重合度不应大于1mm.4.水平角方向观测法的技术要求二、地面高程限制测量水准测量的主要技术要求水准网测量的主要技术要求水准测量测站的视线长度、视距差、视线高度的要求〔m〕三、1.隧道贯穿前的联系测量工作不少于3次,宜在隧道掘进到100m、300m 以及距贯穿面100〜200m时分别进行一次.当地下起始方位角较差小于12〃时,可取各次测量成果的平均值作为后续测量的起算数据指导隧道贯穿.2.隧道内定向边边长应大于60m,视线距隧道边墙的距离应大于0.5m.3.隧道内限制点间平均边长宜为150m.曲线隧道限制点间距不应小于60m.4.水准线路往返较差、附和或闭合差为±8 J Lmm.5.水准测量应在隧道贯穿前进行三次,并应与传递高程测量同步进行.重复测量的高程点间的高程较差应小于5mm,满足要求时,应取逐步平均值作为限制点的最终成果指导隧道掘进.四、暗挖隧道、车站施工测量1.地下施工高程测量采用水准测量方法,水准点宜每50m设置一个.2.施工高程测量可采用不低于DS3级水准仪和区格式木质水准尺,并按城市四等水准测量技术要求进往返观测,其闭合差为±20 J Lmm 〔L以千米计〕.3.施工竖井、斜井等地面放样,应设结构四角或十字轴线,放样后应进行检核.临时结构放样中误差为±50mm,永久结构放样中误差为±20mm.4.车站采用分层开挖施工时,宜在各层测设地下限制点或基线,各限制点或基线点的测量中误差为±5mm.有条件时各层应进行贯穿测量.5.采用双侧壁〔桩〕及梁柱导洞法施工时,应根据施工导线测设壁〔桩〕的位置,其测量允许误差为±5mm.6.车站钢管柱的位置,应根据车站线路中线点测定,其测设允许误差为土3mm.钢管柱安装过程中监测其垂直度,安装就位后应进行检核测量.7,始发井中,线路中线、反力架及导轨测量限制点的三维坐标测设置与设计值较差应小于3mm.8.衬砌环完成壁后注浆后,宜在管片出车架后进行测量内容宜包括衬砌环中央坐标、底部高程、水平直径、垂直直径和前端面里程.测量误差为±3mm.9.暗、明挖隧道和高架结构横向贯穿测量中误差为±50mm,高程贯穿测量中误差为± 25mm.五、明挖隧道、车站施工测量1.检测成果与原成果较差:精密导线点应小于10mm、二等水准点应小于5mm、线路中线限制点应小于15mm o2.基坑围护结构施工测量2.1连续墙的中央线放样中误差应为±10mm;2.2内外导墙应平行于地下连续墙中线,其放样允许误差应为土5mm;2.3连续墙竣工后,应测定其实际中央位置与设计中央线的偏差,偏差值应小于30mm.3.结构施工测量3.1结构底板绑扎钢筋前,应依据线路中线,在底板垫层上标定出钢筋摆放位置,放线允许误差应为±10mm.3.2结构边墙、中墙模板支立前,应按设计要求,依据线路中线放样边墙内侧和中墙两侧线,放样允许偏差为0〜+5mm.3.3顶板模板安装过程中,应将线路中线点和顶板宽度测设在模板上, 并应测量模板高程,其高程测量允许误差为0〜+10mm,中线测量允许误差为± 10mm,宽度测量允许误差为-10〜+15mm.3.4采用盖挖逆作法的结构施工测量应按以下方法进行:1.顶板立模,应在连续墙或桩墙的顶面,每5m测量一个高程点并标定其位置,同时在连续墙或桩墙的侧面标出顶板底面设计高程线,其测量允许误差为0〜10mm;2.中板施工前,应对顶板上的线路中线限制点和高程限制点进行检测,并通过顶板上的预留孔或预留口将这些限制点的坐标和高程传递到中板的基坑面上,作为支立中板模板和钢筋的依据;在浇筑混凝土前应对标定在模板上的线路中线限制点和高程点进行检核,其中线测量允许误差为±10mm,高程允许误差为0〜+10mm;3.底板的施工测量方法同中板,其中线允许误差应为±10mm,高程允许误差应在-10〜0mm之内.六、结构断面测量1.结构横断面及底板纵断面测量应以贯穿平差后的施工平面和高程限制点及调整后的线路中线点为依据,按设计或工程需要进行.直线段每6m、曲线段每5m测量一个横断面和底板高程点,结构横断面变化处和施工偏差较大段应加侧断面.2.结构横断面测量可采用不低于III级全站仪或断面测量仪等测量设备进行测量.横断面里程中误差为±50mm,断面点与线路中线法距的测量中误差为±10mm,断面点高程的测量中误差为±20mm.3.底板纵断面高程点可使用不低于DS3级水准仪测量,里程中误差为土50mm,高程测量中误差为±20mm.七、铺轨基标测量1.限制基标在线路直线段宜每120m设置一个,曲线段除在曲线要素点上设置限制基标外,曲线要素点间距较大时还宜每60m设置一个.2.限制基标埋设完成后,应对其进行检测,检测内容、方法与各项限差应满足以下要求:2.1检测限制基标间夹角时,其左、右角各测两个测回,左右角平均值之和与360°较差应小于6〃;距离往返观测各测两个测回测回较差及往返较差应小于5mm;2.2直线段限制基标间夹角与180°较差应小于8〃,实测距离与设计距离较差应小于10mm;曲线段限制基标间夹角与设计值较差计算出的线路横向偏差应小于2mm,弦长测量值与设计值较差应小于5mm;2.3限制基标高程测量应起算于施工高程限制点,按二等水准测量技术要求施测;限制基标高程实测值与设计较差应小于2mm,相邻限制基标间高差与设计值得高差较差应小于2mm.八、隧道施工测量1.隧道工程的贯穿限差2.隧限差道限制测量对贯穿中误差影响值3.隧道洞内外平面限制测量的等级4.隧道洞内、洞外高程限制测量的等级5.洞内平面限制网导线的边长宜近似相等,直线段不宜短于200m,曲线段不宜短于70m;导线边距离洞内设施不小于0.2m.6.洞内高程限制水准测量应往返进行,且每隔200〜500m应设立一个水准点.。