Canny算子的三个最优准则
- 格式:docx
- 大小:28.41 KB
- 文档页数:1
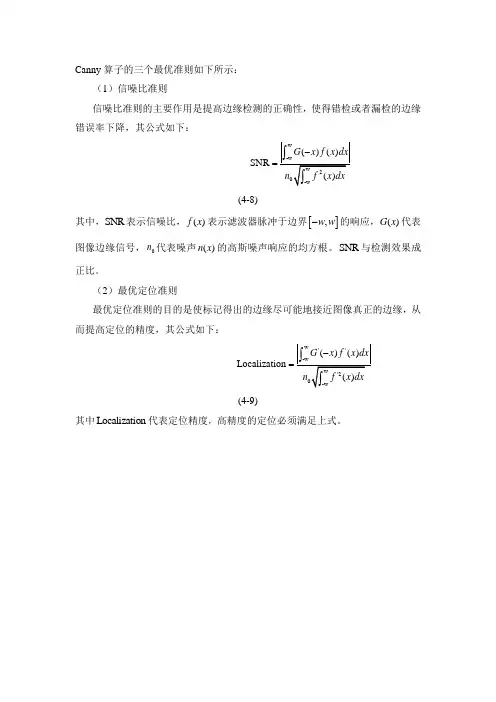
Canny 算子的三个最优准则如下所示:
(1)信噪比准则 信噪比准则的主要作用是提高边缘检测的正确性,使得错检或者漏检的边缘错误率下降,其公式如下:
SNR = (4-8)
其中,SNR 表示信噪比,()f x 表示滤波器脉冲于边界[],w w -的响应,()G x 代表图像边缘信号,0n 代表噪声()n x 的高斯噪声响应的均方根。
SNR 与检测效果成正比。
(2)最优定位准则
最优定位准则的目的是使标记得出的边缘尽可能地接近图像真正的边缘,从而提高定位的精度,其公式如下:
Localization = (4-9)
其中Localization 代表定位精度,高精度的定位必须满足上式。
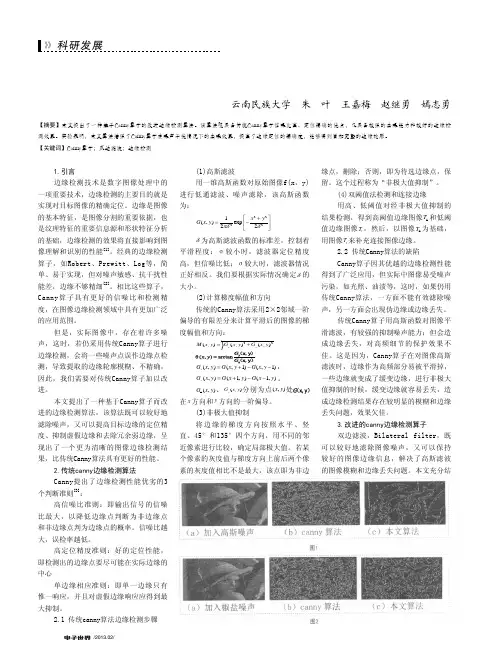
自适应阈值Canny边缘检测算法研究作者:徐亮吴海涛孔银昌来源:《软件导刊》2013年第08期摘要:对Canny边缘检测算法进行了对比研究,分析了传统Canny算法存在的缺陷,提出了一种改进的自适应阈值Canny边缘检测算法。
首先利用具有边缘保留功能的双边滤波器滤除噪声,然后运用基于梯度幅值的类间方差最大化算法(OSTU)来确定Canny算子的高低阈值,最后进行边缘检测与连接。
实验结果表明,该改进算法很好地解决了传统Canny算法存在的缺陷,而且对光照的变化和场景变化具有很强的自适应能力,进一步扩展了Canny算法的应用范围。
关键词关键词:Canny算子;自适应阈值;边缘检测;双边滤波中图分类号:TP312 文献标识码:A 文章编号文章编号:16727800(2013)0080062020 引言边缘检测是图像分析与计算机视觉领域一直研究的热点,传统的边缘检测算子如Roberts、Sobel、Prewitt、Kirsch、LOG、Canny等,由于算法自身存在着种种不足,在实际应用中效果并不十分理想。
1986年,John Canny提出了最佳边缘检测算子的3个准则,并推导出了一个最优边缘检测算子的近似实现——Canny算法[1]。
Canny算子具有比较好的检测效果,并得到了广泛的应用,但是在应用Canny进行边缘检测时,一方面,应用高斯滤波器对原图像进行滤波后,在一定程度上对噪声起到了抑制作用,却也对图像的边缘信息进行了平滑,使得边缘信息丢失;另一方面,在进行边缘点的选取时,需要人工设定高低两个阈值,当光照或场景发生变化时,需要人工来改变此双阈值,这使得Canny算法不具有自适应性。
针对Canny算法存在的上述问题,许多学者提出了自己的改进算法。
针对采用高斯滤波器可能造成原图像的边缘信息丢失问题,文献[2]提出采用中值滤波代替高斯平滑滤波,并对混有椒盐噪声的图像进行处理,取得了比较好的效果;文献[3]提出自适应空间域平滑方式清除图像的椒盐噪声,达到了较好的去噪效果。
网络天地171改进的Canny 图像边缘检测算法分析◆王 娟1 边缘检测的过程边缘检测主要用于解决图像边缘的真假,边缘的定向定位。
以此来初步分析图像和识别图像。
想要做好边缘检测,需要遵循以下五个方面的过程进行检测分析:(1)首先要明确的了解图像检测时图像的特性变化形式,运用合适的检测方法。
(2)根据特殊情况需求,利用多算子综合计算方法。
提取多范围的变化特性,以便检测图像上的所有特性变化。
(3)由于噪声的影响,使检测有一定的局限性。
检测时需要尽可能的滤除噪音。
还需要考虑到噪音的条件检测,进一步检测参数变化。
(4)尽可能用多种方法进行组合。
例如在检测时,先找到边缘,然后利用函数近似的放法,利用内插获得高精度定位。
(5)检测时,首先对原图像进行平滑处理,然后再进行边缘检测。
一方面可以有效地抑制噪音,另一方面也可以对边缘进行精准定位。
2 传统Canny 算子的基本工作原理由于系统固有的低筒滤波对实际的图像进行平滑,以至于边缘不明显。
所以,这就需要边缘检测通过寻找出图像局部具有最大梯度值的一些像素点。
同时由于摄影机以及周围环境的干扰,因此图片边缘检测必须满足两个条件:①逼近必须能够抑制噪音效应;②必须尽量精准的确定边缘的位置。
以高定位精准、高信噪比、单一边缘响应位判断标准。
Canny 算子的基本流程:输入原始图像→转为灰度图像→ 高斯平滑→ 梯度计算→ 非极大值抑制→ 双阈值检测→ 连接边缘→ 输出边缘图像。
作为一阶微分滤波器的Canny 算子属于边缘检测,有三大显著优点:1、最优过零点定位准则2、多峰值响应准则3、最大信噪比准则。
Canny 算子基本的工作原理首先便是利用高斯平滑滤波器对图像进行平滑处理,目的是为了去除噪音的影响,然后通过计算梯度差值,来完成领域局部强度值。
利用高阈值和低阈值以及双阈值的计算方法对图像边缘进行检测已达到增强边缘的效果。
3 Canny 算子的实现步骤Canny 算子在整体运算的过程中,其需要结合多个运算步骤进行整体的运算。
边缘检测-edge detection1.问题描述边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点。
图像属性中的显著变化通常反映了属性的重要事件和变化。
这些包括(i)深度上的不连续、(ii)表面方向不连续、(iii)物质属性变化(iv)场景照明变化。
边缘检测是图像处理和计算机视觉中,尤其是特征提取中的一个研究领域。
边缘检测的评价是指对边缘检测结果或者边缘检测算法的评价。
诚然,不同的实际应用对边缘检测结果的要求存在差异,但大多数因满足以下要求:1)正确检测出边缘2)准确定位边缘3)边缘连续4)单边响应,即检测出的边缘是但像素的2.应用场合图像边缘检测大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。
有许多方法用于边缘检测,它们的绝大部分可以划分为两类:基于查找一类和基于零穿越的一类。
基于查找的方法通过寻找图像一阶导数中的最大和最小值来检测边界,通常是将边界定位在梯度最大的方向。
基于零穿越的方法通过寻找图像二阶导数零穿越来寻找边界,通常是Laplacian过零点或者非线性差分表示的过零点。
3.研究历史和现状边缘检测作为图像处理的一个底层技术,是一个古老又年轻的课题,有着悠久的历史。
早在1959年,B.Julez就提到过边缘检测,随后,L.G.Robert于1965年对边缘检测进行系统的研究。
3.1一阶微分算子一阶微分算子是最原始,最基本的边缘检测方法,它的理论依据是边缘是图像中灰度发生急剧变化的地方,而图像的提督刻画了灰度的变化速率。
因此,通过一阶微分算子可以增强图像中的灰度变化区域,然后对增强的区域进一步判断边缘。
在点(x,y)的梯度为一个矢量,定义为:梯度模值为:梯度方向为:根据以上理论,人们提出了许多算法,经典的有:Robert算子,Sobel算子等等,这些一阶微分算子的区别在于算子梯度的方向,以及在这些方向上用离散化数值逼近连续导数的方式和将这些近似值合成梯度的方式不同。
经典边缘检测算子比较一各种经典边缘检测算子原理简介图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。
灰度或结构等信息的突变处称为边缘。
边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。
需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。
由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。
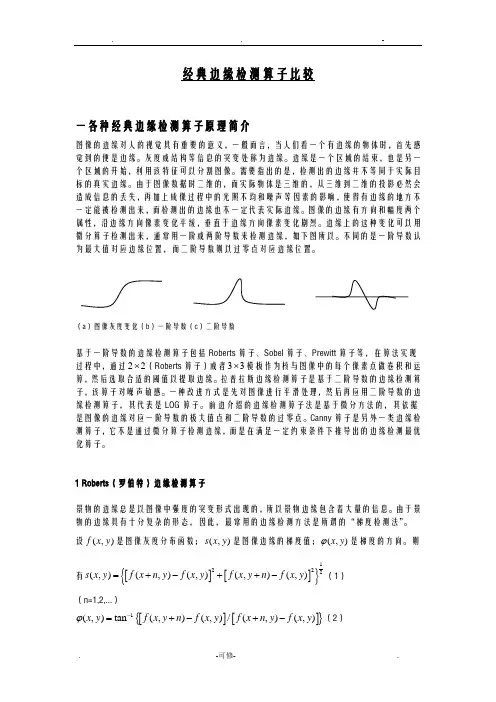
图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。
边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。
不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。
(a )图像灰度变化(b )一阶导数(c )二阶导数基于一阶导数的边缘检测算子包括Roberts 算子、Sobel 算子、Prewitt 算子等,在算法实现过程中,通过22⨯(Roberts 算子)或者33⨯模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。
拉普拉斯边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。
一种改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是LOG 算子。
前边介绍的边缘检测算子法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数的过零点。
Canny 算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。
1 Roberts (罗伯特)边缘检测算子景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。
由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法是所谓的“梯度检测法”。
设(,)f x y 是图像灰度分布函数;(,)s x y 是图像边缘的梯度值;(,)x y ϕ是梯度的方向。
matlab 中canny算法什么是Canny算法?Canny算法是一种常用于图像边缘检测的计算机视觉算法。
它由约翰·Canny在1986年提出,目的是在保持最佳信噪比的同时准确地检测出图像中的边缘。
Canny算法的步骤是什么?Canny算法包括以下几个步骤:1. 噪声抑制:由于图像中常常存在噪声,因此第一步是对图像进行平滑处理以抑制噪声。
常用的方法是应用高斯滤波器。
2. 计算梯度:通过计算图像的梯度来确定边缘的强度和方向。
梯度计算通常使用Sobel算子,它可以有效地检测图像中的边缘。
3. 非极大值抑制:在计算梯度之后,需要对梯度幅度图像进行非极大值抑制。
这一步的目的是去除那些不是真正边缘的像素。
4. 双阈值检测:在经过非极大值抑制之后,需要对幅度图像进行阈值处理。
Canny算法使用双阈值检测来确定强边缘和弱边缘。
任何高于高阈值的像素被认为是强边缘,低于低阈值的像素被认为是弱边缘。
5. 边缘跟踪:最后一步是利用边缘跟踪算法来连接强边缘。
边缘跟踪算法基于弱边缘像素与强边缘像素的连接关系,通过追踪弱边缘像素与强边缘像素的路径来确定最终的边缘。
Canny算法的优缺点是什么?Canny算法有以下几个优点:1. 准确性:Canny算法能够准确地检测图像中的边缘,尤其在边缘区域有噪声的情况下。
2. 低错误率:相比于其他边缘检测算法,Canny算法的错误率较低,能够有效地排除非边缘像素。
3. 单一边缘:Canny算法仅提取单一像素的边缘,不会将边缘模糊化。
虽然Canny算法有许多优点,但也存在一些缺点:1. 计算量大:Canny算法需要进行多次计算,包括高斯滤波、梯度计算和非极大值抑制等,因此计算量较大。
2. 参数选择:Canny算法涉及到多个参数的选择,如高斯滤波器的大小和标准差、双阈值检测的高低阈值等。
不同的参数选择可能导致不同的结果。
3. 边缘连接:Canny算法在边缘连接过程中可能会产生断裂的边缘。
摘要本文从原理和应用效果上对经典的图像分割方法如边缘检测、阈值分割技术和区域增长等进行了分析。
对梯度算法中的Roberts算子、Sobel算子、Prewitt算子、拉普拉斯(Laplacian)算子、LoG(Laplacian-Gauss)算子、坎尼(Canny)算子的分割步骤、分割方式、分割准则相互比较可以看出根据坎尼(Canny)边缘算子的3个准则得出的边缘检测结果最满意。
而阈值分割技术的关键在于阈值的确定,只有阈值确定好了才能有效的划分物体与背景,但这种方法只对于那些灰度分布明显,背景与物体差别大的图像的分割效果才明显。
区域增长的基本思想是将具有相似性质的像素集合起来构成新区域。
与此同时本文还分析了图像分割技术研究的方向。
关键词:图像处理图像分割AbstractThis article analyses the application effect to the classics image segmentation method like the edge examination, territory value division technology, and the region growth and so on.For comparing the Roberts operator, Sobel operator, Prewitt operator, the operator of Laplacian and the operator of LoG(Laplacian-Gauss),Canny operator in gradient algorithm,the step, the way and the standard of the image segmentation,we can find out the three standard of Canny edge operator the edge detection result of reaching most satisfy. And the key point of threshold segmentation lie in fixing the threshold value, it is good to have only threshold value to determine it then can be effective to divide object and background,but this kind of method is good to those gray scales,the big difference image effect between the background and obiect. The basic idea of area is to form the new region from similar nature.And also, this paper analyses the research direction of image segmentation technology at the same time.Key words: image processing image segmentation operator目录(一般目录要求最多是三级目录,不要出现四级目录)第一章绪论 (1)1.1数字图像处理的基本特点 (1)1.1.1数字图像处理的信息大多是二维信息,处理信息量很大(三级标题有问题)1 1.1.2数字图像处理占用的频带较宽 (2)1.1.3数字图像中各个像素是不独立的,其相关性大 (2)1.1.4作合适的假定或附加新的测量 (2)1.1.5数字图像处理后的图像受人的因素影响较大 (2)1.2数字图像处理的优点 (2)1.2.1再现性好 (2)1.2.2处理精度高 (3)1.2.3适用面宽 (3)1.2.4灵活性高 (3)1.3数字图像处理的应用 (4)1.3.1航天和航空技术方面的应用 (4)1.3.2生物医学工程方面的应用 (5)1.3.3通信工程方面的应用 (5)1.3.4工业和工程方面的应用 (5)1.3.5军事公安方面的应用 (5)1.3.6文化艺术方面的应用 (6)1.4数字图像分割技术的发展概况 (6)1.4.1 基于分形的图像分割技术 (6)1.4.2 基于神经网络的图像分割技术 (7)1.5本文的主要流程图 (8)第二章数字图像处理的处理方式 (9)2.1图像变换 (9)2.2图像编码压缩 (9)2.3图像增强和复原 (9)2.4图像分割 (9)2.5图像描述 (10)2.6图像分类(识别) (10)第三章 MATLAB平台及其开发环境 (11)3.1.MATLAB的组成 (11)3.1.1MATLAB主要有以下几个部分 (11)a.数值计算功能 (12)b.符号计算功能 (12)c.数据分析功能 (12)d.动态仿真功能 (12)e.程序借口功能 (13)f.文字处理功能 (13)3.2MATLAB的特点 (13)3.2.1功能强大,可扩展性强 (13)3.2.2界面友好,编程效率高 (14)3.2.3图像功能,灵活且方便 (14)3.3MATLAB在图像处理中的应用 (14)第四章图像分割概念及算法研究 (16)4.1图像分割的基本概念 (16)4.1.1图像分割定义 (16)4.2边缘检测方法(4.1和4.2之间不是并行关系) (17)4.2.1边缘检测概述 (17)4.2.2边缘检测梯度算法 (19)a.梯度边缘检测算法基本步骤及流程图 (19)b.Robert算子 (20)c.Sobel算子 (21)d.Prewitt算子 (21)4.2.3拉普拉斯(Laplacian)算子 (22)4.2.4LoG(Laplacian-Gauss)算子 (24)4.2.5坎尼(Canny)算子 (25)4.3灰度阈值分割 (27)4.3.1阈值分割介绍 (28)a.阈值化分割原则 (28)b.阈值分割算法分类 (29)4.3.2全局阈值 (30)a.极小值点阈值 (31)b.最优阈值 (31)c.迭代阈值分割 (33)4.3.3动态阈值 (34)a.阈值插值 (35)b.水线阈值算法 (35)4.4区域分割 (37)4.4.1区域生长的基本原理、步骤及流程图 (37)4.4.2生长准则和过程 (40)a.灰度差准则 (40)b.灰度分布统计准则 (41)c.区域形状准则 (42)4.4.3分裂合并 (43)第五章总结 (45)5.1对于图像边缘检测的分析 (45)5.2对于图像阈值分割的分析 (45)5.3对于图像区域分割的分析 (46)5.4改进意见(改进可另外做为一章比如说某某算法等的若干改进等,不要放入总结一章中)(总结是对整篇文章的一个概述,应该是写比如得出些什么结论,一些算法间比较等相关问题。
基于改进Canny算子与图像形态学融合的边缘检测方法赵洁;李玮;郝志鹏;彭慧卿【摘要】传统Canny算法采用高斯滤波会造成图像的过度光滑,容易导致缓变边缘的丢失,而且梯度幅值的计算方法没有充分考虑到3x3邻域内周围像素对中心像素的影响.针对上述存在的问题与不足,结合小波融合技术的优势,提出了一种基于改进Canny算子与图像形态学融合的边缘检测方法,利用改进的Canny算子和图像形态学分别对图像进行边缘检测,然后应用小波融合技术把两种方法检测出来的边缘进行图像融合,得到最终的图像边缘.仿真结果表明,该算法具有较好的抗噪能力,有效地提高了边缘检测的准确性和完整性.【期刊名称】《微型机与应用》【年(卷),期】2011(030)010【总页数】4页(P44-47)【关键词】Canny算子;图像形态学;边缘检测;图像融合【作者】赵洁;李玮;郝志鹏;彭慧卿【作者单位】天津城市建设学院电子与信息工程系,天津300384;天津城市建设学院电子与信息工程系,天津300384;天津城市建设学院电子与信息工程系,天津300384;天津城市建设学院电子与信息工程系,天津300384【正文语种】中文【中图分类】TP301.6边缘检测是图像分割、目标区域识别和特征提取等数字图像分析领域中的重要技术,目前已经成为机器视觉研究领域最活跃的热点课题之一。
传统边缘检测方法包括Roberts算子、Sobel算子等一阶微分算子,以及Laplacian算子、LOG算子等二阶微分算子[1]。
这类算法以满足一阶导数极大值点或者二阶导数过零点作为图像的候选边缘点,通过人为设定的全局阈值作为评价标准去除噪声与弱边缘点,将梯度值小于阈值的候选边缘点删除。
由于微分运算对噪声比较敏感,抗噪声性能差,提取的边缘不够精细,因此在实际应用中受到了限制[2]。
对于边缘检测算子性能优劣,Canny提出了三个评价准则[2]:高信噪比准则、定位精准准则和单一边缘唯一响应准则,并据此提出了Canny边缘检测算子。
边缘分割(Canny算⼦)最近有⽤到Canny算⼦做边缘检测。
回顾⼀下Canny算⼦的基本原理:总的来说,图像的边缘检测必须满⾜两个步骤(1)有效的抑制噪声,使⽤⾼斯算⼦对图像进⾏平滑;(2)尽量精确的确定边缘的位置;Canny算⼦的边缘检测可以分为三个步骤:Step 1: ⾼斯平滑函数。
⽬的是为了平滑以消除噪声;Step 2:⼀阶差分卷积模板。
⽬的是为了达到边缘增强。
该步骤有点类似于与两个⽅向模板进⾏卷积运算。
这两个⽅向模板为(a)和(b)所⽰:左图体现的是在X⽅向上的差异,右图体现的是在y⽅向上的差异。
同时获得梯度幅值的⼤⼩以及⽅向⾓。
通过该步,获得在边缘位置处特征被加强的图像。
Step 3:⾮极⼤值抑制(NMS)。
⽬的是保留梯度⽅向上的最⼤值。
这⼀步是⽐较关键的⼀点:仅仅得到全局的梯度并不⾜以确定边缘,因此为确定边缘,必须保留局部梯度最⼤的点,⽽抑制⾮极⼤值图2⾮极⼤值抑制四个扇区的标号为0到3,对应3*3邻域的四种可能组合。
在每⼀点上,邻域的中⼼象素M与沿着梯度线的两个象素相⽐。
如果M的梯度值不⽐沿梯度线的两个相邻象素梯度值⼤,则令M=0。
——假设上⼀步骤得到的梯度图为G(x,y);对G(x,y)进⾏初始化:N(x,y)=G(x,y)——在梯度和反梯度⽅向上各找n个像素点。
若G(x,y)不是这些点中的最⼤点,则将N(x,y)置为0,否则保持N(x,y)不变。
Step4: 双线性阈值⾸先是⼀个较⼤的阈值:Nmax.使⽤该阈值⼆值化后的图像含有较少的假的边缘点,但是端点较多!使⽤较⼩的阈值:Nmin,使⽤该阈值⼆值化后的图像含有较多的假的边缘点;通过上⼀步获取的边缘点,判断其8邻域内有⽆第⼆步获得的边缘点,然后进⾏连接!另⼀种简单的⽅法是,把梯度⽅向简化为4个⽅向:『0,45,90,135』最后⼀步为对N(x,y)进⾏阈值化处理:⼤的阈值会得到——少量的边缘点以及众多的空隙⼩的阈值会得到——⼤量的边缘点以及众多的错误检测。
一种提取印鉴方法的研究摘要:文中提出了一种票据印鉴预处理、特征提取的方法。
该方法包括从包含文本、数字的票据中对印鉴图像的二值化、边缘检测、形态学处理、特征提取等;利用每种印鉴拥有固定的面积大小,避免了复杂背景下的噪声干扰和人为因素的干扰,实验数据表明在误识率和快速性之间具有良好的平衡性和算法的鲁棒性,有利于票据数字化存储。
关键词:印鉴提取图像处理特征识别中图分类号:tp391 文献标识码:a 文章编号:1007-9416(2012)11-0121-03印鉴的提取是银行印鉴自动识别系统中的瓶颈,由于待验印鉴是由客户盖上去的,受到用力不均匀,油墨质量,光照等因素的影响,印章会出现颜色深浅不均,图像模糊等现象,从而丢失部分印章信息,再加上票据本身还有底图和不同灰度,不同颜色的文字,因此依据印章的特征直接进行提取的方法在实际中不能取得很好的效果。
印鉴识别主要难点在于:第一,印鉴有不同形状:方形、圆形、椭圆形、三角形等,没有一个统一的方法适用于各种形状的印鉴。
第二,由于票据在各种场合应用中背景变得异常复杂,有效的提取印鉴本身对其识别很关键;另外由于人为的因素,同一枚印章所盖出的印鉴也存在填充度、均匀度、笔画宽度等的不同;第三,印鉴附着的纸张等介质上的背景签名、介质在流通时污染产生的污点等等,造成图像质量较差,这些因素对印鉴图像的提取造成了很大的干扰,影响识别结果。
通过扫描仪或者其它录入设备获取票据图像信息。
国内票据在某个地区布局上具有统一性,这为印鉴的提取提供了必要的支持,印章作为一个单位或个人的标志,都是要使用特殊的颜色进行盖印,一般为红色或者紫色。
所以,有些方法是基于颜色空间分布特征,但是如果是极度模糊,或者印鉴颜色被多种颜色干扰,该方法提取效率不高。
因此本文从面积大小的角度研究印鉴提取方法。
1、彩色票据图像预处理首先通过扫描录入一张rgb色彩的票据原图,然后对原图进行预处理主要包括图像灰度化、灰度线性变换、灰度图二值化以及噪声去除,从而尽可能地将票据的各个部分的数据都保留在图像上。
计算机视觉机器视觉和图像处理三者之间主要有什么关系图像处理是计算机视觉的一个子集。
计算机视觉系统利用图像处理算法对人体视觉进行仿真。
例如,如果目标是增强图像以便以后使用,那么这可以称为图像处理。
如果目标是识别物体、汽车自动驾驶,那么它可以被称为计算机视觉。
ImageProcessing更多的是图形图像的一些处理,图像像素级别的一些处理,包括3D的处理,更多的会理解为是一个图像的处理;而机器视觉呢,更多的是它还结合到了硬件层面的处理,就是软硬件结合的图形计算的能力,跟图形智能化的能力,我们一般会理解为他就是所谓的机器视觉。
而我们今天所说的计算机视觉,更多的是偏向于软件层面的计算机处理,而且不是说做图像的识别这么简单,更多的还包括了对图像的理解,甚至是对图像的一些变换处理,当前我们涉及到的一些图像的生成,也是可以归类到这个计算机视觉领域里面的。
所以说计算机视觉它本身的也是一个很基础的学科,可以跟各个学科做交叉,同时,它自己内部也会分的比较细,包括机器视觉、图像处理。
图像分割技术之图像边缘检测:我对图像边缘检测的理解:人的视觉上就是把图像中的一座房子的边缘给画出来,大多数是房子的线条,这是宏观上的理解。
让我们抽象到微观世界中,为什么能够检测出一条线呢?那是因为存在灰度级间断,就是说这条线两边的像素点都处于一个阶跃跳变状态(一部分显示黑,一部分显示白色,可以想象成一个台阶吧),那是理想模型,往往是因为物理硬件问题是无法达到骤变的效果,而是一个斜坡式的上升。
那么我们可以对它进行求导了。
一阶导数:可以判断是否是边界二阶导数:可以判断是在黑的那部分还是白的那部分。
明白了抽象状态的边缘组成状况,那么可以去拿算子来对图片进行检测了。
简单说一下算子吧,可以理解为一个模(mu)子,也就是个模型,你拿着这个模子从图像的左上角,从左往右,一行一行的进行匹配,中间会进行一个计算,算出的值如果大于阈值的话那么就会报警说:“我是边缘“,然后把那个像素的值改成256,如果不是边缘的话,那就把值设置成0。
第36卷第11期 光电工程V ol.36, No.11 2009年11月Opto-Electronic Engineering Nov, 2009 文章编号:1003-501X(2009)11-0106-06改进的自适应阈值Canny边缘检测雒 涛1, 2,郑喜凤1,丁铁夫1( 1. 中国科学院长春光学精密机械与物理研究所,长春130033;2. 中国科学院研究生部,北京100039 )摘要:针对传统Canny边缘检测算法的阈值需要人为设定的缺陷,本文提出了一种新的自适应改进方法。
该方法根据梯度直方图信息,提出梯度差分直方图的概念,同时,对图像进行自适应分类处理,使得算法不仅不需要人工设定阈值参数,而且还能有效地避免Canny算法在边缘寻找中的断边和虚假边缘现象。
对边缘信息丰富程度不同的灰度图和彩色图像运用该方法寻找边缘的实验结果表明,对于在目标与背景交界处的多数像素梯度幅值较大的图片,该算法具有边缘检测能力强、自适应能力强的优点。
关键词:Canny算法;自适应;边缘检测;图像处理中图分类号:TN247;TP391 文献标志码:A doi:10.3969/j.issn.1003-501X.2009.11.022 Improved Self-adaptive Threshold Canny Edge DetectionLUO Tao1, 2,ZHENG Xi-feng1,DING Tie-fu1( 1. Changchun Institute of Optics, Fine Mechanics and Physics,Chinese Academy of Sciences, Changchun 130033, China;2. Graduate School of Chinese Academy of Sciences, Beijing 100039, China )Abstract: The two thresholds of classical Canny operator need to be set manually, which limits the application of this algorithm. Therefore, many researches about how to choose threshold adaptively are done to solve this problem. Based on the gradient histogram, a method of threshold-adaptable edge detection is proposed. This method is on the basis of gradient histogram difference diagram with adaptive image classification techniques. It not only automatically sets the two thresholds, but also avoids disconnected or false edges in detection. Experiments prove that the method is threshold-adaptive and advantageous for edge detection in color image whose pixels of larger gradient amplitude are mainly located in the edge between the target and background.Key words: Canny operator; threshold-adaptive; edge detection; image process0 引 言边缘是重要的图像特征。
Canny 算子的三个最优准则如下所示:
(1)信噪比准则 信噪比准则的主要作用是提高边缘检测的正确性,使得错检或者漏检的边缘错误率下降,其公式如下:
SNR = (4-8)
其中,SNR 表示信噪比,()f x 表示滤波器脉冲于边界[],w w -的响应,()G x 代表图像边缘信号,0n 代表噪声()n x 的高斯噪声响应的均方根。
SNR 与检测效果成正比。
(2)最优定位准则
最优定位准则的目的是使标记得出的边缘尽可能地接近图像真正的边缘,从而提高定位的精度,其公式如下:
Localization = (4-9)
其中Localization 代表定位精度,高精度的定位必须满足上式。