交流伺服系统常见故障及处理
- 格式:pdf
- 大小:525.47 KB
- 文档页数:45
交流伺服电机常见故障交流伺服系统包括:伺服驱动器、伺服电机和一个反馈传感器(一般伺服电机自带光电编码器)。
所有这些部件都在一个控制闭环系统中运行;驱动器从外部接收参数信息,然后将一定电流输送给电机,通过电机转换成扭矩带动负载,负载根据自己的特性进行动作或加减速,传感器测量负载的位置,使驱动装置对设定信息值和实际位置值进行比较,然后通过改变电机电流使实际位置值和设定信息值保持一致,当负载突然变化引起速度变化时,编码器获知这种速度变化后会马上反应给伺服驱动器,驱动器又通过改变提供给伺服电机的电流值来满足负载的变化,并重新返回到设定的速度。
交流伺服系统是一个响应非常高的全闭环系统,负载波动和速度矫正之间的时间滞后响应是非常快的。
二、交流伺服电机振动故障分析以下对交流伺服电机振动故障的分析主要从机械方面和电气方面进行。
1. 机械方面(1)电机两端和丝杠轴承座上的轴承磨损后间隙过大,或者轴承缺少润滑脂后轴承滚动体和保持架磨损严重造成负载过重。
轴承磨损后间隙过大会造成电机转子中心和丝杠中心存在同轴度误差,使机械系统产生抖动。
轴承滚动体和保持架磨损严重会造成摩擦力增加导致“堵转”,“堵转”在不至于导致“过载报警”的情况下,由于负载过重,会增加伺服系统的响应时间产生振动;(2)电机转子不平衡,电机转子的动平衡制造时有缺陷或使用后变差,就会产生形如“振动电机”一样的振动源;(3)转轴弯曲,转轴弯曲的情况类似于转子不平衡,除了会产生振动源也会产生电机转子中心和丝杠中心的同轴度误差,使机械传动系统产生抖动;(4)联轴器制造缺陷或使用后磨损会造成联轴器两部分的同轴度误差,特别是使用铸造的刚性联轴器,由于本身的制造精度差,更容易产生同轴度误差导致振动;(5)导轨的平行度在制造时较差会导致伺服系统无法到达指定位置到无法停留在指定位置,这时伺服电机会不停的在努力寻找位置和系统反馈间徘徊,使电机连续的振动;(6)丝杠与导轨平面的平行度误差,丝杠在安装过程中与导轨所在平面有平行度误差也会使电机由于负载不均匀产生振动;(7)丝杠弯曲,丝杠弯曲后丝杠除了受到轴向推力外还会受到变化的径向力,弯曲大时径向力大,弯曲小时径向力小,同样这种不应该存在的径向力也会使机械传动系统产生振动。
伺服电机常见故障与维修伺服电机常见故障与维修伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
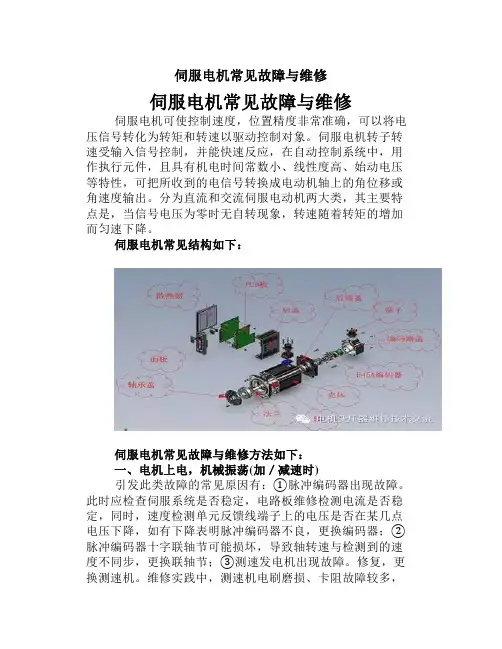
伺服电机常见结构如下:伺服电机常见故障与维修方法如下:一、电机上电,机械振荡(加/减速时)引发此类故障的常见原因有:①脉冲编码器出现故障。
此时应检查伺服系统是否稳定,电路板维修检测电流是否稳定,同时,速度检测单元反馈线端子上的电压是否在某几点电压下降,如有下降表明脉冲编码器不良,更换编码器;②脉冲编码器十字联轴节可能损坏,导致轴转速与检测到的速度不同步,更换联轴节;③测速发电机出现故障。
修复,更换测速机。
维修实践中,测速机电刷磨损、卡阻故障较多,此时应拆下测速机的电刷,用纲砂纸打磨几下,同时清扫换向器的污垢,再重新装好。
二、电机上电,机械运动异常快速(飞车)出现这种伺服整机系统故障,应在检查位置控制单元和速度控制单元的同时,还应检查:①脉冲编码器接线是否错误;②脉冲编码器联轴节是否损坏;③检查测速发电机端子是否接反和励磁信号线是否接错。
一般这类现象应由专业的电路板维修技术人员处理,负责可能会造成更严重的后果。
三、主轴不能定向移动或定向移动不到位出现这种伺服整机系统故障,应在检查定向控制电路的设置调整、检查定向板、主轴控制印刷电路板调整的同时,还应检查位置检测器(编码器)的输出波形是否正常来判断编码器的好坏(应注意在设备正常时测录编码器的正常输出波形,以便故障时查对)。
四、坐标轴进给时振动应检查电机线圈、机械进给丝杠同电机的连接、伺服系统、脉冲编码器、联轴节、测速机。
五、出现NC错误报警NC报警中因程序错误,操作错误引起的报警。
伺服电机常见故障代码分析及处理方法伺服电机是通过控制回路来实现精确定位和控制转速的电机,常见故障代码可能会导致电机无法工作或者无法达到预期的运动效果。
以下是一些常见故障代码及其处理方法:1.报警代码E01:驱动过流保护。
这通常是由于电机受力过大或者电机驱动器故障引起的。
处理方法是检查电机负载是否正常,可以通过减小负载或增加驱动器容量来解决。
2.报警代码E02:驱动过热保护。
这可能是由于电机驱动器温度过高引起的。
处理方法是检查驱动器是否通风良好,并确保散热器没有堵塞。
还可以降低电机负载或者增加驱动器的容量。
3.报警代码E03:驱动器故障。
这可能是由于驱动器的故障引起的,例如驱动器损坏或者通讯故障。
处理方法是检查驱动器是否正常工作,可以尝试重新启动驱动器或更换驱动器。
4.报警代码E04:位置超差。
这可能是由于位置误差超过了设定的阈值引起的。
处理方法是检查位置传感器的准确性,可以通过重新校准位置传感器来解决。
5.报警代码E05:速度超差。
这可能是由于速度误差超过了设定的阈值引起的。
处理方法是检查速度传感器的准确性,并确保传感器与驱动器的通讯正常。
6.报警代码E06:电机过载。
这可能是由于电机受力过大引起的。
处理方法是检查电机负载是否正常,可以通过减小负载或增加驱动器容量来解决。
7.报警代码E07:电机过热。
这可能是由于电机温度过高引起的。
处理方法是检查电机是否通风良好,并确保散热器没有堵塞。
还可以降低电机负载或者增加驱动器的容量。
除了以上常见故障代码,还可能会出现其他故障,例如电机无法运动、电机运动不匀速等。
在处理这些故障时,可以先检查电机驱动器及其控制系统是否正常工作,然后逐步检查电机及其相关传感器的准确性,最后根据具体情况采取相应的措施。
总结起来,伺服电机常见故障代码分析及处理方法主要包括检查电机负载、驱动器温度及散热情况、驱动器及通讯故障、位置及速度传感器准确性、电机温度等方面,并根据具体情况采取相应的修复措施。
伺服电机系统常见故障及维修一、电机不转或转动无力的故障可能原因及维修方法1.1 电机供电异常电机供电异常可能是由于电源线路的接触不良或电源开关故障引起的。
首先,检查电源线路是否插好,是否存在破损或接触不良的情况,若有问题,重新连接或更换电源线路。
同时,检查电源开关是否正常工作,如有问题,及时维修或更换。
1.2 控制器故障控制器故障可能导致电机无法正常工作。
检查控制器的指示灯是否点亮,若无亮灯提示,说明可能存在控制器故障。
此时应先尝试重新启动控制器,如果问题仍然存在,需要检查控制器的电路板和连接线路是否损坏,如有损坏,可尝试修复或更换。
1.3 电机零部件损坏电机零部件损坏也会导致电机无法正常转动或转动无力。
常见的损坏部件包括电刷、轴承和绕组等。
若发现电刷磨损、轴承磨损或绕组烧毁等情况,需要及时更换损坏部件。
二、电机发热过高的故障可能原因及维修方法2.1 过载工作过载工作是导致电机发热过高的常见原因之一。
检查电机负载是否超过额定工作范围,如果超载,则需要减小负载或更换功率较大的电机。
2.2 电机通风不良电机通风不良会导致散热不畅,进而引发过热问题。
检查电机周围是否存在堵塞物或灰尘等,清除堵塞物并保持通风良好。
2.3 绕组短路或接触不良绕组短路或接触不良会导致电流过大,进而使电机发热过高。
检查电机绕组是否存在损坏或接触不良的情况,如有问题,需重新绝缘或修复绕组。
三、电机震动较大的故障可能原因及维修方法3.1 电机不平衡电机不平衡是导致震动的常见原因之一。
检查电机固定是否牢固,如发现松动,需重新固定电机。
3.2 机械部件损坏机械部件损坏也会导致电机震动较大。
检查电机的传动装置,如发现齿轮磨损、轴承松动等情况,应及时更换损坏部件。
3.3 电机负载不均衡电机负载不均衡也可能导致电机震动。
检查负载的均衡性,如需要,调整或重新安装负载,以平衡电机负载。
综上所述,伺服电机系统常见故障主要包括电机不转或转动无力、电机发热过高和电机震动较大等问题。
常见的伺服系统故障及其解决方法是什么伺服系统在工业自动化中扮演着重要角色,能够精确控制运动系统,提高生产效率和产品质量。
然而,伺服系统也存在一些常见的故障问题,如电机运行异常、传感器信号异常等。
本文将介绍几种常见的伺服系统故障,并提供相应的解决方法。
一、电机运行异常电机运行异常是伺服系统故障中最常见的问题之一。
可能的原因包括电机绕组断线、电机轴承磨损、电机电缆接触不良等。
解决这些问题的方法如下:1. 检查电机绕组:使用万用表或欧姆表检查电机绕组是否有断线或短路。
如果发现问题,需要修复或更换绕组。
2. 检查电机轴承:观察电机轴承是否转动灵活,有无异响。
如发现轴承磨损,应及时更换。
3. 检查电缆接触不良:检查电机电缆是否牢固连接在驱动器和电机上。
如果接触不良,要重新紧固连接。
二、传感器信号异常传感器信号异常是导致伺服系统故障的另一个常见问题。
可能的原因包括传感器损坏、接线错误或传感器信号干扰。
以下是解决方法:1. 检查传感器状态:使用测试仪器检查传感器输出信号是否正常。
如果信号异常,需要更换传感器。
2. 检查接线:根据传感器的接线图,检查传感器的接线是否正确。
如果接线错误,要重新进行正确的接线。
3. 降低信号干扰:将传感器与其他电源线隔离,可以降低信号干扰的可能性。
另外,可以使用屏蔽线缆来减少干扰。
三、驱动器故障驱动器故障也是伺服系统常见的问题之一。
可能的原因包括驱动器过载、驱动器配置错误等。
以下是解决方法:1. 调整驱动器参数:检查驱动器的参数配置是否正确,包括电机额定电流、电机类型等。
根据实际情况,调整参数配置。
2. 检查电源电压:检查驱动器所使用的电源电压是否稳定。
如果电源电压过高或过低,可能导致驱动器故障,需要进行调整或更换电源。
3. 隔离过载源:如果驱动器过载,可以尝试隔离过载源,如减小负载、增加驱动器容量等。
综上所述,常见的伺服系统故障包括电机运行异常、传感器信号异常和驱动器故障。
解决这些问题的方法涉及到检查电机绕组、电机轴承和电缆接触状态,检查传感器状态和接线情况,调整驱动器参数和电源电压等。
常见的伺服驱动器故障及处理方法伺服驱动器是一种控制电机运动的装置,用于将控制信号转换为电机运动。
然而,由于各种原因,伺服驱动器可能会发生故障,导致电机无法正常运转。
以下是一些常见的伺服驱动器故障及处理方法:1.电源故障:伺服驱动器的电源供应不稳定或无法正常工作,可能导致电机运动异常或停止。
处理方法包括检查电源连接是否稳定,更换或修复电源供应设备。
2.控制信号故障:伺服驱动器的控制信号传输发生故障,使电机无法按预期进行运动。
处理方法包括检查信号线是否连接正确,信号是否在传输过程中受到干扰,更换或修复信号传输设备。
3.电机故障:伺服驱动器无法正确控制电机运动的一个常见原因是电机本身出现故障。
处理方法包括检查电机是否受损或烧毁,更换故障电机。
4.参数设置错误:伺服驱动器的参数设置与实际应用要求不匹配,导致电机无法正常工作。
处理方法包括检查伺服驱动器的参数设置是否正确,根据实际需求重新配置参数。
5.过载保护:伺服驱动器可能会出于过载保护的目的停止电机运动。
处理方法包括检查负载是否过重或电机是否存在其他故障,减少负载或修复电机问题。
6.温度过高:伺服驱动器长时间工作可能导致温度过高而停止运行。
处理方法包括检查散热设备是否正常工作,增加散热效果或降低工作负载。
7.通讯故障:伺服驱动器与其他设备之间的通讯故障可能导致电机无法正常运行。
处理方法包括检查通讯线路是否连接正确,通讯协议是否一致,修复或替换通讯设备。
8.机械部件故障:伺服驱动器的机械结构或传动部件出现故障可能导致电机无法运动。
处理方法包括检查机械部件是否受损或磨损,修复或更换故障部件。
9.乱码或干扰:伺服驱动器可能会受到外部干扰或电磁干扰导致运动异常。
处理方法包括检查干扰源并采取隔离措施,加装屏蔽设备或更换信号处理设备。
10.软件故障:伺服驱动器的控制软件可能出现错误或崩溃,导致电机无法正常运行。
处理方法包括重启伺服驱动器,重新安装或更新软件。
伺服驱动器常有故障的原由及对策伺服驱动器因为长时间的使用,不免会出现故障,最重要的是实时查找出原由,对应解决故障,提早恢复正常使用。
小编在这整理伺服驱动器常有的故障原由及对策供大家参考。
1、伺服电机在有脉冲输出时不运行,怎样办理?①监督控制器的脉冲输出目前值以及脉冲输出灯能否闪耀,确认指令脉冲已经执行并已经正常输出脉冲 ;②检查控制器到驱动器的控制电缆,动力电缆,编码器电缆能否配线错误,损坏或许接触不良 ;③检查带制动器的伺服电机其制动器能否已经翻开;④监督伺服驱动器的面板确认脉冲指令能否输入;⑤ Run 运行指令正常 ;⑥控制模式务必选择地点控制模式;⑦伺服驱动器设置的输入脉冲种类和指令脉冲的设置能否一致;⑧保证正转侧驱动严禁,反转侧驱动严禁信号以及偏差计数器复位信号没有被输入,脱开负载而且空载运行正常,检查机械系统。
2、伺服电机高速旋转时出现电机偏差计数器溢犯错误,怎样办理?①高速旋转时发生电机偏差计数器溢犯错误;对策:检查电灵活力电缆和编码器电缆的配线能否正确,电缆能否有损坏。
②输入较长指令脉冲时发生电机偏差计数器溢犯错误;对策:a. 增益设置太大,从头手动调整增益或使用自动调整增益功能;b. 延伸加减速时间 ;c. 负载过重,需要从头选定更大容量的电机或减少负载,加装减速机等传动机构提高负荷能力。
③运行过程中发生电机偏差计数器溢犯错误。
对策:a. 增大偏差计数器溢出水平设定值;b. 减慢旋转速度 ;c. 延伸加减速时间 ;d. 负载过重,需要从头选定更大容量的电机或减少负载,加装减速机等传动机构提升负载能力。
3、伺服电机做地点控拟订位严禁,怎样办理?① 第一确认控制器实质发出的脉冲目前值能否和预料的一致,如不一致则检查并修正程序 ;② 监督伺服驱动器接收到的脉冲指令个数能否和控制器发出的一致,如不一致则检查控制线电缆 ;③检查伺服指令脉冲模式的设置能否和控制器设置得一致,如CW/CCW仍是脉冲+方向;④伺服增益设置太大,试试从头用手动或自动方式调整伺服增益;⑤ 伺服电机在进行来去运动时易产生积累偏差,建议在工艺同意的条件下设置一个机械原点信号,在偏差高出同意范围以行进行原点搜寻操作;⑥机械系统自己精度不高或传动机构有异样( 如伺服电机和设施系统间的联轴器部发生偏移等 ) 。
伺服电机常见故障分析及处理三相交流伺服电机应用广泛,但经过长期运行后,会发生各种故障。
及时判断故障原因,进行相应处理,是防止故障扩大,保证设备正常运行的一项重要工作。
一电机编码器报警01故障原因①接线错误;②电磁干扰;③机械振动导致的编码器硬件损坏;④现场环境导致的污染;02故障排除①检查接线并排除错误;②检查屏蔽是否到位,检查布线是否合理并解决,必要时增加滤波器加以改善;③检查机械结构,并加以改进;④检查编码器内部是否受到污染、腐蚀(粉尘、油污等),加强防护;03安装及接线标准①尽量使用原装电缆;②分离电缆使其尽量远离污染接线,特别是高污染接线;③尽可能始终使用内部电源。
如果使用开关电源,则应使用滤波器,确保电源达到洁净等级;④始终将公共端接地;⑤将编码器外壳与机器结构保持绝缘并连接到电缆屏蔽层;⑥如果无法使编码器绝缘,则可将电缆屏蔽层连接到编码器外壳和驱动器框架上的接地 (或专用端子)。
二电机断轴01故障原因①机械设计不合理导致径向负载力过大;②负载端卡死或者严重的瞬间过载;③电机和减速机装配时不同心。
02故障排除①核对电机样本中可承受的最大径向负载力,改进机械设计;②检查负载端的运行情况,确认实际的工艺要求并加以改进;③检查负载运行是否稳定,是否存在震动,并加以改进机械装配精度。
三电动机空载电流不平衡,三相相差大01 故障原因①绕组首尾端接错;②电源电压不平衡;③绕组存在匝间短路、线圈反接等故障。
02故障排除①检查并纠正;②测量电源电压,设法消除不平衡;③消除绕组故障。
四电动机运行时有异响01 故障原因①轴承磨损或油内有砂粒等异物;②转子铁芯松动;③轴承缺油;④电源电压过高或不平衡。
02故障排除①更换轴承或清洗轴承;②检修转子铁芯;③加油;④检查并调整电源电压。
五电动机起动困难,额定负载时,电动机转速低于额定转速较多01 故障原因①电源电压过低;②面接法电机误接;③转子开焊或断裂;④转子局部线圈错接、接反;③修复电机绕组时增加匝数过多;⑤电机过载。
常见的伺服驱动器故障及处理方法伺服驱动器是一种用于控制伺服电机的装置,通常用于工业自动化领域。
由于长时间运行和受各种条件的影响,伺服驱动器可能会出现各种故障。
以下是一些常见的伺服驱动器故障及其处理方法。
1.电压不稳定:当电压波动较大时,可能导致伺服驱动器无法正常工作。
解决方法是使用稳压器来稳定电压,或者使用电压稳定器来提供稳定的电压。
2.过载保护:当负载超过伺服驱动器的额定功率时,可能会触发过载保护,导致伺服驱动器停止工作。
解决方法是检查负载是否超过额定功率,并相应调整负载或更换更高功率的伺服驱动器。
3.温度过高:长时间运行或工作环境温度过高可能导致伺服驱动器过热,从而影响其性能和寿命。
解决方法是确保伺服驱动器安装在通风良好的位置,并定期清理散热器或风扇,以确保良好的散热。
4.通信故障:伺服驱动器通常通过串口或以太网进行通信。
当通信线路中断或存在故障,伺服驱动器可能无法接收或发送指令。
解决方法是检查通信线路是否连接良好,并确保使用可靠的通信设备。
5.编码器故障:编码器是伺服驱动器用于检测电机位置和速度的关键部件。
编码器故障可能导致伺服电机无法准确运动。
解决方法是检查编码器连接是否正确,并进行必要的校准或更换编码器。
6.电源故障:伺服驱动器的电源故障可能导致其无法正常工作。
解决方法是检查电源连接是否稳定,并检查电源是否符合伺服驱动器的要求。
7.控制信号故障:伺服驱动器的控制信号故障可能导致无法实现所需的运动。
解决方法是检查控制信号线路是否连接正确,并确保使用可靠的控制设备。
8.软件故障:伺服驱动器的软件故障可能导致其无法正常运行或反应迟缓。
解决方法是重新启动伺服驱动器,并更新或重新安装软件。
9.机械故障:伺服驱动器与机械设备紧密结合,机械故障可能导致伺服驱动器无法正常工作。
解决方法是检查机械部件是否损坏,并进行必要的修复或更换。
总之,及时识别和解决伺服驱动器故障是确保其正常工作和延长寿命的关键。
通过定期维护、良好的使用环境和合理操作,可以减少伺服驱动器故障的发生,并确保其在工业自动化生产中的稳定运行。
伺服电机常见故障处理技巧伺服电机是一种控制系统中常用的电动机,它能够根据输入的控制信号来精确控制电机的运动。
然而,由于长时间的使用以及其他原因,伺服电机也会出现一些常见故障,下面将介绍一些常见故障的处理技巧。
首先,伺服电机可能会出现电机无法正常启动的故障。
在这种情况下,可以首先检查电源线是否接触良好,并确保电源电压是否正常。
如果电源电压正常,则可以通过检查伺服驱动器的报警灯来确定是否有故障代码显示。
如果有故障代码显示,可以根据伺服驱动器的说明书查找故障原因,并采取相应的措施进行处理。
其次,伺服电机可能会出现无法精准定位的故障。
在这种情况下,可以首先检查接口线是否连接正确,并确保控制信号是否正常。
如果控制信号正常,则可以通过测量伺服电机的反馈信号来确定是否出现误差。
如果误差较大,则可能是伺服电机的编码器出现问题,此时可以尝试重新校准编码器或更换编码器来解决问题。
此外,伺服电机可能会出现运动过程中速度不稳定的故障。
在这种情况下,可以首先检查伺服驱动器的参数设置是否正确,并确保伺服电机的负载是否合适。
如果参数设置正确且负载合适,则可能是伺服电机的控制器出现问题,此时可以尝试进行控制器重新初始化或更换控制器来解决问题。
另外,伺服电机还可能会出现温升过高的故障。
在这种情况下,可以首先检查伺服电机的散热系统是否正常,并清理散热器上的灰尘和污垢。
如果散热系统正常,则可能是伺服电机的驱动器出现问题,此时可以尝试减小负载或更换驱动器来解决问题。
最后,伺服电机还可能会出现噪音过大的故障。
在这种情况下,可以首先检查伺服电机的连接部位是否有松动,并检查传动部件是否正常工作。
如果连接部位正常且传动部件正常工作,则可能是伺服电机的轴承出现问题,此时可以尝试润滑轴承或更换轴承来解决问题。
综上所述,伺服电机常见故障的处理技巧包括:检查电源线和控制信号的连接情况,确保电源电压和控制信号正常;根据伺服驱动器的报警代码或测量反馈信号确定故障原因;检查参数设置和负载情况,尝试重新校准编码器或更换控制器;检查伺服电机的散热系统和连接部位,尝试清理灰尘和润滑轴承。
FANUC交流伺服驱动系统故障维修举例例244~245.加工过程中出现过热报警的故障维修例244.故障现象:某配套FANUC 0T MATE系统的数控车床,在加工过程中,经常出现伺服电动机过热报警。
分析与处理过程:本机床伺服驱动器采用的是FANUC S系列伺服驱动器,当报警时,触摸伺服电动机温度在正常的范围,实际电动机无过熟现象。
所以引起故障的原因应是伺服驱动器的温度检测电路故障或是过热检测热敏电阻的不良。
通过短接伺服电动机的过热检测热敏电阻触点,再次开机进行加工试验,经长时间运行,故障消失,证明电动机过热是由于过热检测热敏电阻不良引起的,在无替换元件的条件下,可以暂时将其触点短接,使其系统正常工作。
例245.故障现象:某配套FANUC 0T MATE系统的数控车床,在加工过程中,经常出现X轴伺服电动机过热报警。
分析与处理过程:故障分析过程同上例,经检查X轴伺服电动机外表温度过高,事实上存在过热现象。
测量伺服电动机空载工作电流,发现其值超过了正常的范围。
测量各电枢绕组的电阻,发现A相对地局部短路;拆开电动机检查发现,由于电动机的防护不当,在加工时冷却液进入了电动机,使电动机绕阻对地短路。
修理电动机后,机床恢复正常。
例246.驱动器出现OVC报警的故障维修故障现象:某配套FANUC 0T-C系统、采用FANUC S系列伺服驱动的数控车床,手动运动X轴时,伺服电动机不转,系统显示ALM414报警。
分析与处理过程:FANUC 0T-C出现ALM 414报警的含义是“X轴数字伺服报警”,通过检查系统诊断参数DGN720~723,发现其中DGN720 bit5=l,故可以确定本机床故障原因是X轴OVC(过电流)报警。
分析造成故障的原因很多,但维修时最常见的是伺服电动机的制动器未松开。
在本机床上,由于采用斜床身布局,所以X轴伺服电动机上带有制动器,以防止停电时的下滑。
经检查,本机床故障的原因确是制动器未松开:根据原理图和系统信号的状态诊断分析,故障是由于中间继电器的触点不良造成的,更换继电器后机床恢复正常。
伺服电机常见故障分析及处理伺服电机是一种能够实现精确控制的电机,其常见故障分析及处理如下:1.电机无法启动或无转动-检查电机的供电电压是否正常,如果不正常,检查电源系统并修复。
-检查电机的连接线路是否松动或损坏,如有问题,重新连接或更换电缆。
-检查电机的驱动器或控制器是否正常,如有故障,修复或更换。
-检查电机本身是否损坏,如有需要,修理或更换电机。
2.电机转速不稳定或不一致-检查控制器或驱动器的参数设置是否正确,如有问题,调整参数进行稳定控制。
-检查电机的传感器或编码器是否损坏或松动,如有问题,修复或重新固定。
-检查电机的机械连接部分是否松动或损坏,如有问题,进行调整或更换。
-检查电机的绕组或定子是否损坏,如有需要,修理或更换电机。
3.电机运行过热或发热-检查电机供电电压是否过高,如有问题,调整电压。
-检查电机负载是否过大,如有需要,减少负载。
-检查电机的冷却系统是否正常,如有问题,修复或更换冷却设备。
-检查电机的绝缘是否损坏,如有需要,修理或更换电机。
4.电机震动或噪音过大-检查电机的机械部分是否松动或损坏,如有问题,进行调整或更换。
-检查电机的轴承是否损坏或干涉,如有需要,修理或更换轴承。
-检查电机的定子或转子是否不平衡,如有问题,进行平衡处理。
-检查电机的绕组是否损坏,如有需要,修理或更换电机。
5.电机的定位精度不高-检查控制器或驱动器的参数设置是否正确,如有问题,调整参数进行精确控制。
-检查电机的传感器或编码器是否损坏或松动,如有需要,修复或重新固定。
-检查电机的机械连接部分是否松动或损坏,如有问题,进行调整或更换。
-检查控制系统的反馈回路是否正常,如有问题,修复或更换。
伺服系统的常见故障及处理方法伺服系统是一种广泛应用于工业自动化领域的控制系统,它通过精确控制电机的速度和位置来实现对机械设备的精密控制。
然而,由于长时间使用、操作误差或环境影响等原因,伺服系统也会出现一些常见故障。
本文将介绍几种常见的伺服系统故障,并提供相应的处理方法。
一、电机运转异常1. 电机不转动或转动困难:处理方法:首先检查电机的电源连接是否正确,确认电源供应是否正常。
其次,检查是否存在电机线圈或转子损坏等机械故障。
最后,检查驱动器参数设置是否正确,如转速、转矩控制参数等。
2. 电机转速不稳定:处理方法:检查伺服系统的反馈装置,如编码器、脉冲计数器等,确保其正常工作。
同时,调整驱动器的速度环参数,提高伺服系统的控制精度。
另外,确保电机的供电电压稳定,避免电压波动对转速造成影响。
二、编码器信号异常1. 编码器信号丢失或不稳定:处理方法:检查编码器连接是否牢固,确保连接处没有松动。
同时,检查编码器接口的信号线是否受到干扰,如存在干扰源应及时消除。
另外,还可以通过更换编码器线缆、增加抗干扰滤波器等方式来提高信号的稳定性。
2. 编码器信号误码:处理方法:首先检查编码器光电栅片或磁栅片是否损坏,如果损坏应及时更换。
其次,调整编码器信号校正参数,以提高信号的准确性。
此外,检查编码器接口的连接是否正确,确保与驱动器的匹配性。
三、驱动器故障1. 电机震动:处理方法:检查驱动器的震动抑制功能是否开启,并适当调整其参数。
此外,检查电机的负载情况,是否超过了驱动器的额定输出能力。
2. 驱动器过热:处理方法:确保驱动器的散热设备正常工作,如风扇是否畅通,散热片是否清洁。
另外,调整驱动器的过载保护参数,避免超负荷工作导致过热。
四、控制系统故障1. 控制信号丢失或干扰:处理方法:检查控制信号的连接是否良好,避免控制线路与电源线路或高功率干扰源相交叉。
同时,增加控制系统的抗干扰设备,如光电隔离器、滤波电容等。
2. 控制系统响应慢或不灵敏:处理方法:检查控制器的采样周期是否设置合理,过大的采样周期会导致系统响应慢。
伺服系统的故障分析与维修伺服系统是一种通过传感器和控制器来监测和调整机械运动的技术。
它广泛应用于工业自动化领域,如机械加工、装配线、印刷机械等。
然而,由于各种原因,伺服系统可能会出现故障。
本文将分析伺服系统的常见故障原因,并提供一些维修和排除故障的建议。
一、故障原因分析:1.电源问题:伺服系统需要稳定的电源供应才能正常工作。
如果电源电压不稳定或存在供电故障,伺服系统可能会失去反馈控制,导致运动失控或停止。
解决方法:检查电源线路是否连接正确,检查电压是否稳定。
如有必要,可以添加稳压器或备用电源。
2.传感器故障:伺服系统使用传感器来监测和反馈运动状态。
如果传感器损坏或出现连接问题,伺服系统将无法正常工作。
解决方法:检查传感器的连接是否牢固,检查传感器的工作状态。
如有必要,更换损坏的传感器。
3.控制器故障:伺服系统的控制器是核心部件,负责接收和处理传感器反馈信号,控制电机和执行器的运动。
解决方法:检查控制器的供电和通信线路是否正常。
如有必要,可以尝试重新启动控制器或更换故障的控制器。
4.电机故障:伺服系统的电机是实现机械运动的关键部件。
如果电机出现故障或损坏,伺服系统将无法正常工作。
解决方法:检查电机的供电线路和连接是否正常。
如有必要,可以检查电机的绝缘和转子,或者更换故障的电机。
5.机械故障:伺服系统的机械部件如传动装置和负载可能会出现故障或损坏,导致伺服系统无法正常运动。
解决方法:检查机械部件的连接和润滑情况。
如果发现故障或损坏的机械部件,及时修复或更换它们。
二、维修和排除故障建议:1.定期维护:定期检查和维护伺服系统,包括清洁机械部件、检查电源和传感器连接、校准控制器等,可以减少故障发生的可能性。
2.故障排除步骤:当伺服系统出现故障时,应按照以下步骤进行排除:(a)检查电源和供电线路的状态和连接;(b)检查传感器和控制器的连接和工作状态;(c)检查电机和负载的连接和工作状态;(d)检查机械部件的连接和润滑情况;(e)根据故障现象和排除步骤的结果,判断故障原因并采取适当的修复措施。