ABS控制策略与算法研究
- 格式:doc
- 大小:120.00 KB
- 文档页数:3
《基于ESP与ABS协调控制的汽车转向稳定控制研究》篇一一、引言汽车稳定控制技术作为现代汽车安全系统的重要组成部分,对提升驾驶安全性及稳定性起着至关重要的作用。
在汽车行驶过程中,电子稳定程序(ESP)和防抱死刹车系统(ABS)的协同工作对于保持车辆稳定尤为关键。
本文将重点研究基于ESP与ABS协调控制的汽车转向稳定控制技术,探讨其工作原理、控制策略及实际应用效果。
二、ESP与ABS系统概述(一)电子稳定程序(ESP)电子稳定程序(ESP)是一种先进的汽车主动安全技术,通过传感器实时监测车辆行驶状态,对车辆的行驶方向进行自动调整,从而在紧急情况下帮助驾驶员保持车辆稳定。
ESP主要依赖于传感器、执行器和控制系统三部分实现其功能。
(二)防抱死刹车系统(ABS)防抱死刹车系统(ABS)是另一项重要的汽车安全技术,通过实时调节刹车力度,避免车轮在刹车过程中抱死,从而提高车辆在紧急制动时的操控性和稳定性。
ABS系统主要依赖于传感器、制动压力调节器和控制模块等部分实现其功能。
三、ESP与ABS协调控制策略(一)传感器信息融合为了实现ESP与ABS的协调控制,需要充分利用各种传感器信息。
包括转向角度传感器、轮速传感器、加速度传感器等,通过信息融合技术将各传感器数据整合,为控制策略提供准确、实时的车辆状态信息。
(二)控制策略设计基于传感器信息融合的结果,设计合适的控制策略是关键。
在转向过程中,ESP与ABS需根据车辆状态实时调整控制参数,确保车辆在各种路况和驾驶条件下都能保持稳定。
此外,还需考虑系统的响应速度、稳定性及能效等方面的要求。
(三)协调控制算法协调控制算法是实现ESP与ABS协同工作的核心。
通过优化算法,使两者在车辆转向过程中相互配合,共同维护车辆的稳定性和操控性。
在算法设计过程中,需充分考虑车辆动力学特性、路面条件、驾驶员意图等多种因素。
四、汽车转向稳定控制技术研究(一)转向稳定性分析在汽车转向过程中,稳定性分析是评估车辆性能的重要指标。
汽车 ABS 系统的 PID 控制策略及仿真分析*李香桂(甘肃畜牧工程职业技术学院 , 甘肃武威 733006摘要 :运用汽车动力学理论 , 建立了 PID 控制器模型、制动时整车动力学模型、车轮模型。
提出了以滑移率为控制目标的 ABS 系统的控制仿真分析 , 将 PID 控制器应用于单个 ABS 系统控制研究 , 以车轮滑移率为控制目标 , 通过轮速与车速传感器采集汽车速度、车轮转速 , 计算出汽车各轮胎实际滑移率 , 与期望滑移率进行比较后 , 将二者的偏差作为 PID 控制器的输入量 ,反复调节控制器的控制参数 , 使其实际滑移率始终处于最佳滑移率附近 , 通过PID 控制最终使汽车在最佳滑移率所对应的地面制动力下进行制动。
关键词 :汽车 ; ABS ; 控制 ; 仿真分析中图分类号 :U463文献标识码 :A文章编号 :1007-4414(2011 05-0020-03PID control strategy and simulation analysis of ABS systermLi Xiang -gui(Gansu vocational and technical college of animal husbandry , Wuwei Gansu 733006, ChinaAbstract :In this thesis , using vehicle dynamics theory , PID controller model , dynamic model of vehicle braking , the wheel model are established.The simulation ofABS control system which is aimed at the slip ratio is proposed.PID controller is used in the individual ABS system , the control objective is slip rate of wheel.The actual slip ratio is calculated through the wheel speed and vehicle speed which is acquired by the sensor.Compared the actual slip rate with the expected slip ratio , The deviation of them is put in the PID controller.In the end , the actual slip ratio is always near the best slip rate , by repeatedly adjusting the control parameters.At last , the motor vehicle is braked with the best power which is corresponding to the best slip rate .Key words :car ; ABS ; control ; simulation analysis1课题研究的必要性防抱制动系统 ABS (Anti -lock Braking System ,在汽车制动时能根据轮胎与路面间附着力 , 自动调节车轮制动力大小 , 防止车轮抱死滑移 , 保证汽车侧向稳定性和转向操纵性 , 同时缩短制动距离。
汽车ABS的控制算法与仿真研究的开题报告一、题目汽车ABS的控制算法与仿真研究二、研究背景和意义随着汽车工业的不断发展,人们对汽车安全性能的要求也越来越高。
在汽车行驶中,制动系统是非常重要的安全设施,它可以帮助驾驶员在紧急情况下及时减速或停车,从而避免交通事故的发生。
而ABS系统作为制动系统的重要组成部分,其控制算法的优劣直接影响着汽车行驶的安全性能。
因此,ABS系统的控制算法和仿真研究具有重要的研究意义和实际应用价值。
三、研究内容和目标本文的研究内容主要包括以下几个方面:1. 分析ABS系统的结构和工作原理,总结其控制算法的特点和优缺点。
2. 基于MATLAB/Simulink软件,建立汽车ABS系统的仿真模型,验证不同控制算法的性能表现。
3. 进一步改进ABS系统的控制算法,提高其效率和稳定性。
本文的研究目标如下:1. 深入了解ABS系统的控制算法,掌握其工作原理和特点。
2. 建立基于MATLAB/Simulink软件的ABS仿真模型,通过仿真评估不同控制算法的性能表现和优缺点。
3. 提出改进ABS控制算法的方法和方案,从而提高制动效率和驾驶稳定性。
四、研究方法和步骤针对本研究的目标和内容,本文主要采用以下研究方法和步骤:1. 文献综述:首先对ABS系统的结构、工作原理和控制算法等方面进行深入研究和总结,了解相关国内外研究现状和存在的问题。
2. 建立ABS仿真模型:基于MATLAB/Simulink软件,建立完整的汽车ABS仿真模型,模拟不同工况下的制动过程。
在模型中引入合适的干扰项,以验证仿真模型的可靠性和精度。
3. 仿真分析和评估:通过仿真实验,对比不同的ABS控制算法,分析其性能表现和优缺点。
重点考察制动效率和驾驶稳定性等方面的指标。
4. 改进控制算法:结合仿真结果,提出改进ABS控制算法的方法和方案,重点优化制动效率和驾驶稳定性。
5. 结论和展望:总结研究成果,提出结论和建议,指出这项研究的不足和未来方向。
江苏大学
硕士学位论文
基于车轮滑移率的ABS控制算法研究
姓名:李开春
申请学位级别:硕士
专业:控制理论与控制工程
指导教师:朱伟兴
20060601
汪苏大喾磺士学位论交
可以给出控制蹙为
狂=-Ksgnsin(gs/a)
取参数p一0.25:K=0.08:A=15;B=10。
由予~淤系统酌动态稚瘫缀快,应该选择较小的g德,因此在仿真实验中取搿=O,2并且设蔗(o)=O,5,仿真结果如图4。
1所尔。
豳4,1搬馕寻优控制系镜蛹应熙线
从图4.1所示的极值寻优控制系统的响应曲线可以着出系统可以在有限时间内寻找到其最佳工撵点,著鼹持在聚臻工佟点螅邻域内,越时毪麓指褥变璧鞠应地到达最大蕊且保持在最大僮数邻域内。
4.1.3ABS潇移率寻优
从圜2。
1掰示豹汽车轻脍黔热型燃蕾系数她线可以蜇出,ASS系统挎剃是~个典型的极毯寻谯控划阏题,其最健工接点在入∞处,此对其性能搬标纵向嫩饕系数pB到达其难一极大僚点峰瞌辩篱系数#BP。
褒ABS实裕痰瘸中,庆予浚露盔按测量辩餐系数熬方法,餐蔗缀两辩着系数与车辆羰速瘦之闻有一一对寝关系,聪车轮减运菠霹激遴过穗。

摘要汽车防抱死制动系统是在制动时防止车轮抱死的一种机电一体化系统。
逻辑门限值控制方式的特点是不需要建立具体系统的数学模型,并且对系统的非线性控制很有效。
本文依据ABS的工作原理,利用车轮加减角速度门限值及参考滑移率的组合, 构成控制逻辑, 把滑移率调整在峰值附着系数附近波动。
采用Matlab/Simulink 仿真环境, 对不同附着路面下有、无ABS逻辑门限值控制的制动效果进行仿真对比分析,验证了基于逻辑门限值的ABS的控制效果:减小了制动距离和制动时间,增大了制动减速度。
关键词:制动防抱死系统;逻辑门限值控制;仿真;ABSTRACTAutomobile anti-lock braking system is at the time of braking to prevent wheel lock is a mechanical and electrical integration system. Logic threshold control method features no need to establish specific mathematical model of the system, and the system nonlinear control is very effective. On the basis of the working principle of ABS, using wheel and angular velocity threshold value and reference slip ratio combination, constitute the control logic, the slip rate adjustment in friction coefficient near fluctuation. The use of Matlab/Simulink simulation environment, roads of different adhesion coefficients under, no ABS logic threshold control braking effect compared with simulation analysis, verification based on logic threshold value ABS control effects: reduce the braking distance and braking time, increase the braking deceleration.Key word:anti-lock brake system; logic threshold control ; simulation目录第一章绪论 (1)1.1ABS的概念与意义 (1)1.1.1汽车行驶的安全性 (1)1.1.2汽车ABS系统 (2)1.1.3汽车ABS系统的意义 (2)1.2汽车ABS系统的发展 (3)1.2.1国外ABS系统的发展状况 (3)1.2.2国内ABS系统的发展概况 (3)1.2.3ABS防抱死系统的特点 (4)1.3ABS控制理论概论 (5)1.4结论 (7)第二章汽车制动的基本原理 (8)2.1车轮制动时受力分析 (8)2.2地面制动力、制动器制动力与附着力的关系 (9)2.3汽车制动时滑移率与附着系数的关系 (10)2.4汽车制动车轮抱死时的运动状况分析 (12)第三章汽车ABS逻辑门限值法原理与关键技术 (15)3.1逻辑门限值法 (15)3.2单一门限值的控制方法 (15)3.3逻辑门限值法原理 (15)第四章控制逻辑设计与仿真实验 (17)4.1控制逻辑 (17)4.2仿真分析 (18)4.2.1高附着路面仿真 (19)4.2.2低附着路面仿真 (22)结束语 (27)致谢 (28)参考文献 (29)第一章绪论1.1ABS的概念与意义1.1.1汽车行驶的安全性影响汽车行驶安全性的因素有很多,例如:1)汽车状况,如汽车的配备程度、轮胎状况和磨损现象等;2)天气、道路和交通状况,如侧向风、铺装路面状况、交通流量;3)驾驶员素质,即驾驶员的能力和健康状况。
题目汽车ABS逻辑门限值控制算法仿真研究摘要汽车防抱死制动系统是在制动时防止车轮抱死的一种机电一体化系统。
逻辑门限值控制方式的特点是不需要建立具体系统的数学模型,并且对系统的非线性控制很有效。
本文依据ABS的工作原理,利用车轮加减角速度门限值及参考滑移率的组合, 构成控制逻辑, 把滑移率调整在峰值附着系数附近波动。
采用Matlab/Simulink 仿真环境, 对不同附着路面下有、无ABS逻辑门限值控制的制动效果进行仿真对比分析,验证了基于逻辑门限值的ABS的控制效果:减小了制动距离和制动时间,增大了制动减速度。
关键词:制动防抱死系统;逻辑门限值控制;仿真;ABSTRACTAutomobile anti-lock braking system is at the time of braking to prevent wheel lock is a mechanical and electrical integration system. Logic threshold control method features no need to establish specific mathematical model of the system, and the system nonlinear control is very effective. On the basis of the working principle of ABS, using wheel and angular velocity threshold value and reference slip ratio combination, constitute the control logic, the slip rate adjustment in friction coefficient near fluctuation. The use of Matlab/Simulink simulation environment, roads of different adhesion coefficients under, no ABS logic threshold control braking effect compared with simulation analysis, verification based on logic threshold value ABS control effects: reduce the braking distance and braking time, increase the braking deceleration.Key word:anti-lock brake system; logic threshold control ; simulation目录第一章绪论 (1)1.1ABS的概念与意义 (1)1.1.1汽车行驶的安全性 (1)1.1.2汽车ABS系统 (2)1.1.3汽车ABS系统的意义 (2)1.2汽车ABS系统的发展 (3)1.2.1国外ABS系统的发展状况 (3)1.2.2国内ABS系统的发展概况 (3)1.2.3ABS防抱死系统的特点 (4)1.3ABS控制理论概论 (5)1.4结论 (7)第二章汽车制动的基本原理 (8)2.1车轮制动时受力分析 (8)2.2地面制动力、制动器制动力与附着力的关系 (9)2.3汽车制动时滑移率与附着系数的关系 (10)2.4汽车制动车轮抱死时的运动状况分析 (12)第三章汽车ABS逻辑门限值法原理与关键技术 (15)3.1逻辑门限值法 (15)3.2单一门限值的控制方法 (15)3.3逻辑门限值法原理 (15)第四章控制逻辑设计与仿真实验 (17)4.1控制逻辑 (17)4.2仿真分析 (18)4.2.1高附着路面仿真 (19)4.2.2低附着路面仿真 (22)结束语 (27)致谢 (28)参考文献 (29)第一章绪论1.1ABS的概念与意义1.1.1汽车行驶的安全性影响汽车行驶安全性的因素有很多,例如:1)汽车状况,如汽车的配备程度、轮胎状况和磨损现象等;2)天气、道路和交通状况,如侧向风、铺装路面状况、交通流量;3)驾驶员素质,即驾驶员的能力和健康状况。

制动系统控制策略研究制动系统是汽车安全性的重要组成部分,其重要性不言而喻。
制动系统的控制策略是制动系统保证安全、稳定运行的重要因素之一。
本文旨在探讨制动系统控制策略的研究,分析目前市场上常见的制动系统控制策略,探讨其优缺点,并提出未来制动系统控制策略的研究方向。
一、常见的制动系统控制策略目前,市场上常见的制动系统控制策略包括:1.防抱死制动系统(ABS)2.制动力分配系统(EBD)3.牵引力控制系统(TCS)4.车身稳定控制系统(ESP)以上四种系统是目前市场上最为常见的制动系统控制策略,下面我们将逐一探讨其优缺点。
1.防抱死制动系统(ABS)ABS是一种通过智能控制系统防止车轮在刹车时抱死的技术,它能够保证车辆在制动时能够保持方向稳定,避免车辆发生侧滑及失控。
优点:有效避免车轮抱死,提高了刹车效果,大大提高了车辆的安全性。
缺点:ABS技术较为复杂,制造成本较高。
2.制动力分配系统(EBD)EBD是一种通过智能控制系统控制前后轮刹车的力分配比例,以达到防止车辆侧滑的目的,提高了车辆在转弯或急转弯时的稳定性。
优点:能够有效控制前后轮刹车的力分配,大大提高了车辆的稳定性和安全性。
缺点:制动力分配系统需要根据不同车辆的重心、载荷情况进行精确调整,较难精准调控,导致制造成本较高。
3.牵引力控制系统(TCS)TCS是一种通过智能控制系统控制车轮牵引力,防止车辆轮胎打滑的技术,能够有效提高车辆的牵引力和稳定性。
优点:能够有效避免轮胎打滑,提高车辆的牵引力和稳定性,大大提高了车辆的安全性。
缺点:需要根据不同路况和天气环境调整,对于不同的车辆而言,调控过程较复杂。
4.车身稳定控制系统(ESP)ESP是一种通过智能控制系统控制车辆转向的技术,能够有效避免车辆在高速转弯时失去稳定性,提高车辆的安全性。
优点:能够有效避免车辆失去平衡,提高转弯时的稳定性,大大提高了车辆行驶的安全性。
缺点:制造成本较高,需要进行精确调整。
城市车辆防抱死制动系统(Antilock Braking System,以下简称ABS)能良好地保证汽车在制动时的操纵稳定性和制动效果,大大提高汽车的行驶安全性,在发达国家ABS已成为汽车标准配置,我国也将ABS列为重点开发内容。
所以,开展对防抱制动装置的研究具有十分重要的现实意义。
本文从车辆动力学分析着手,提出了基于路面附着系数的ABS控制算法。
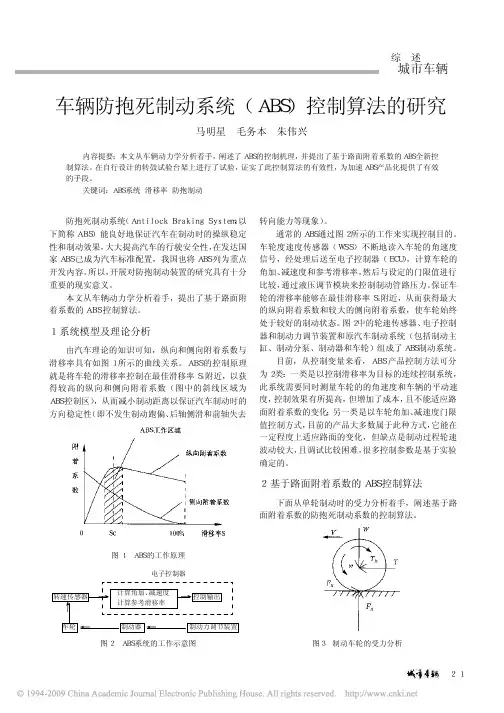
1 系统模型及理论分析由汽车理论的知识可知,纵向和侧向附着系数与滑移率具有如图1所示的曲线关系。
ABS的控制原理就是将车轮的滑移率控制在最佳滑移率Sc附近,以获得较高的纵向和侧向附着系数(图中的斜线区域为ABS控制区),从而减小制动距离以保证汽车制动时的方向稳定性(即不发生制动跑偏、后轴侧滑和前轴失去车辆防抱死制动系统(ABS)控制算法的研究马明星 毛务本 朱伟兴内容提要:本文从车辆动力学分析着手,阐述了ABS的控制机理,并提出了基于路面附着系数的ABS全新控制算法。
在自行设计的转鼓试验台架上进行了试验,证实了此控制算法的有效性,为加速ABS产品化提供了有效的手段。
关键词:ABS系统 滑移率 防抱制动转向能力等现象)。
通常的ABS通过图2所示的工作来实现控制目的。
车轮度速度传感器(WSS)不断地读入车轮的角速度信号,经处理后送至电子控制器(ECU),计算车轮的角加、减速度和参考滑移率,然后与设定的门限值进行比较,通过液压调节模块来控制制动管路压力。
保证车轮的滑移率能够在最佳滑移率Sc附近,从而获得最大的纵向附着系数和较大的侧向附着系数,使车轮始终处于较好的制动状态。
图2中的轮速传感器、电子控制器和制动力调节装置和原汽车制动系统(包括制动主缸、制动分泵、制动器和车轮)组成了ABS制动系统。
目前,从控制变量来看,ABS产品控制方法可分为2类:一类是以控制滑移率为目标的连续控制系统,此系统需要同时测量车轮的的角速度和车辆的平动速度,控制效果有所提高,但增加了成本,且不能适应路面附着系数的变化;另一类是以车轮角加、减速度门限值控制方式,目前的产品大多数属于此种方式,它能在一定程度上适应路面的变化,但缺点是制动过程轮速波动较大,且调试比较困难,很多控制参数是基于实验确定的。
《基于ESP与ABS协调控制的汽车转向稳定控制研究》篇一一、引言随着汽车工业的快速发展,汽车安全性能的优化和提升已成为研究的热点。
特别是在高速行驶和复杂路况下,汽车的转向稳定控制显得尤为重要。
电子稳定程序(ESP)和防抱死刹车系统(ABS)作为现代汽车的重要安全技术,其协调控制对于提升汽车的转向稳定性和行驶安全性具有关键作用。
本文将针对基于ESP与ABS协调控制的汽车转向稳定控制进行研究,旨在提高汽车的操控性和安全性。
二、ESP与ABS技术概述ESP是一种通过传感器实时监测车辆的行驶状态,并根据需要进行主动干预的控制系统。
它能够实时调整发动机输出和刹车系统的工作状态,以保持车辆的稳定性和行驶方向。
而ABS是一种防止车轮在紧急刹车时抱死的系统,通过控制刹车压力,使车轮保持在最佳滑移率,以保持车辆的操控性。
三、汽车转向稳定控制的重要性汽车在高速行驶和复杂路况下的转向过程,是汽车安全性能的重要体现。
如果汽车的转向稳定性不足,很容易导致车辆失控、侧翻等事故。
因此,通过ESP和ABS的协调控制,可以实时监测车辆的行驶状态,调整发动机和刹车系统的工作状态,提高汽车的转向稳定性,从而提升行驶安全性。
四、基于ESP与ABS协调控制的汽车转向稳定控制研究针对汽车转向稳定控制的需求,本研究采用ESP和ABS的协调控制策略。
首先,通过传感器实时监测车辆的行驶状态,包括车速、方向盘角度、轮胎力等数据。
然后,通过算法对这些数据进行处理和分析,得出车辆的行驶状态和可能存在的风险。
接着,根据不同的行驶环境和风险等级,调整ESP和ABS的工作模式,通过调整发动机输出和刹车压力,保持车辆的稳定性和行驶方向。
在协调控制策略中,ESP和ABS的协同作用是关键。
ESP主要负责对车辆的行驶状态进行实时监测和调整,而ABS则负责在紧急刹车时防止车轮抱死。
两者的协同作用可以更好地保持车辆的稳定性和操控性。
此外,本研究还采用了模糊控制、神经网络等先进算法,提高了系统的响应速度和准确性。
汽车ABS逻辑门限值控制算法研究与实现【摘要】汽车防抱死制动系统(ABS)是一种能够有效缩短制动时间和制动距离,保证车辆制动过程中方向稳定性的主动安全装置。
ABS控制算法是系统的核心部分,由于国内没有完全掌握ABS的核心控制算法,国内市场的大部分被国外品牌所垄断,因此开发具有自主知识产权的防抱死控制系统势在必行。
本文围绕自主研发汽车防抱死制动系统这一主题,对汽车ABS逻辑门限值控制算法中的关键技术进行了深入研究。
在分析BOSCH控制逻辑的基础上,对多种路面下的控制策略进行了详细的设计,并通过台架仿真试验和实车道路试验对所设计的控制策略进行了性能验证。
论文的主要内容有:1.论文在对国内外常用ABS控制方法分析的基础上,总结了各种控制方法的优缺点,并指出了ABS控制算法开发过程中的几个难点。
2.对逻辑门限值法中的关键技术进行了分析,重点对单轮控制逻辑、参考车速估算方案和路面辨识方案进行了设计。
3.对多种路面附着系数下的控制策略进行了研究。
单一附着系数路面下前轮采用增压同步控制,后轮采用独立控制;左右分离附着系数路面下,前轮采用修正低选控制,后轮根据所处路面进行单轮控制;对制动过程中路面附着系数发生变化时的相关特征值进行了分析,并对相应... 更多还原【Abstract】 Automobile anti-lock braking system (ABS) is anactive safety device to shorten the braking time and braking distance, and to ensure the directional stability in thebraking process. ABS control algorithm is the core of the system, because the core of ABS control algorithm has not been grasped completely in China, and most of the domestic market has been monopolized by foreign brands, so the development of independent sciential property rights of anti-lock control system is imperative. This pape... 更多还原【关键词】ABS控制算法;逻辑门限值;参考车速;路面辨识;控制策略;【Key words】ABS control algorithm;logical threshold;reference speed;road identification;control strategy;【索购硕士论文全文】Q联系Q:138113721 139938848 即付即发目录摘要4-5Abstract 5-6第一章绪论9-161.1 汽车ABS概述9-111.1.1 ABS系统的作用和意义91.1.2 ABS的发展和应用9-111.2 国内外现有ABS控制方法简介11-131.2.1 PID控制111.2.2 滑动模态变结构控制11-121.2.3 最优控制121.2.4 神经网络控制121.2.5 模糊控制12-131.2.6 耗散功率控制法131.2.7 逻辑门限值控制131.3 汽车ABS控制算法开发过程中的难点13-141.4 论文选题的背景和意义14-151.5 论文的结构和内容15-16第二章汽车ABS逻辑门限值法原理与关键技术16-322.1 ABS控制原理16-172.2 逻辑门限值法17-192.2.1 单一门限值的控制方法172.2.2 车轮角加速度辅助参考滑移率的控制方法17-182.2.3 逻辑门限值法原理18-192.3 ABS控制逻辑设计19-232.3.1 BOSCH控制逻辑分析192.3.2 单轮控制逻辑及流程19-232.4 参考车速估算方案设计23-282.4.1 参考车速估算方法23-242.4.2 峰值连线法的可行性24-252.4.3 改进的峰值连线法25-262.4.4 改进峰值连线法的峰值捕捉26-282.5 路面辨识方案设计28-312.5.1 利用轮速峰峰值连线斜率值辨识282.5.2 利用保压段中车轮角加速度值的辨识28-292.5.3 利用首次增压次数与轮速降值结合的辨识方法29-312.6 本章小结31-32第三章多种路面附着系数下的控制策略32-483.1 单一附着系数路面下的控制策略32-363.1.1 前轮增压同步控制32-353.1.2 后轮控制35-363.2 左右分离附着系数路面下的控制策略36-383.2.1 前轮控制36-383.2.2 后轮控制383.3 制动中路面附着系数变化时的控制策略38-463.3.1 高附着路面跃变到低附着路面的控制38-403.3.2 高附着路面跃变到对开路面的控制40-413.3.3 低附着路面跃变到高附着路面的控制41-433.3.4 低附着路面跃变到对开路面的控制43-443.3.5 对开路面跃变到高附着路面的控制44-453.3.6 对开路面跃变到低附着路面的控制45-463.4 ABS故障时的控制策略46-473.4.1 轮速传感器故障时的控制46-473.4.2 电磁阀故障时的控制473.5 本章小结47-48第四章仿真台架测试与验证48-564.1 重庆卡福ABS仿真台架介绍48-494.2 系统上位机49-504.3 试验结果与分析50-554.3.1 单一附着系数路面下的制动试验50-524.3.2 左右分离附着系数路面下的制动试验52-534.3.3 对接路面下的制动试验53-554.4 本章小结55-56第五章实车道路试验验证56-695.1 试验场地565.2 试验用车及主要试验设备56-575.3 试验结果与分析57-655.3.1 参考车速估算准确性的验证57-585.3.2 单一附着系数路面下制动试验58-615.3.3 左右分离附着系数路面下的制动试验61-635.3.4 由高附着系数路面驶向低附着系数路面的制动试验63-645.3.5 由低附着系数路面驶向高附着系数路面的制动试验64-655.4 汽车防抱制动性能检测65-685.5 本章小结68-69第六章全文总结与展望69-716.1 全文总结69-706.2 研究展望70-71致谢71-72参考文献。
abs的mpc算法
"abs"是指绝对值函数,它将输入的任何数值取其绝对值。
而"MPC"代表"Model Predictive Control"(模型预测控制),它是一种用于控制系统的高级控制算法。
绝对值函数在数学中表示为abs(x),其中x是一个实数。
它的定义如下:
abs(x) = |x|
MPC算法是一种优化控制方法,通过使用一个预测模型来对系统行为进行建模,并通过优化算法来生成最优的控制策略。
在MPC中,通常会定义一个代价函数,该函数衡量系统偏离期望状态的程度,并根据这个代价函数对控制信号进行调整。
如果你想应用MPC算法对绝对值函数进行控制,你需要定义一个合适的模型来描述这个问题。
这可能涉及到对绝对值函数进行近似或者引入其他的参数来描述函数行为。
然后,你可以使用MPC算法来优化控制策略,使得系统的输出尽可能接近期望的绝对值函数输出。
具体的MPC算法实现会涉及到许多细节和数学公式,在此我无法提供完整的代码。
然而,你可以参考相关的MPC文献和资料,了解如何将MPC算法应用于特定的控制问题。
汽车ABS控制算法及基于ARM的控制器开发研究的开题报告一、研究背景ABS(Anti-lock Braking System)即“防抱死刹车系统”,主要是利用电脑及传感器控制车轮的旋转,使汽车在强力制动过程中避免车轮因过度制动而抱死,从而确保汽车在制动状态下仍能充分掌控车辆的方向性和稳定性,从而避免或减少交通事故的发生。
ABS控制算法的研究与开发是现代汽车电子技术和汽车控制技术发展的重要领域。
目前,ABS控制算法主要由欧洲、美国和日本等汽车产业发达国家进行研究和开发,并且其应用广泛。
对于我国汽车产业而言,开发优秀的ABS控制算法和相应的控制器,具有重要的意义。
其一,可以提高我国汽车安全性能和竞争力;其二,对于汽车发展“中国制造2025”战略来说,也是有着很大的帮助。
目前,国内市场上的ABS控制器大多为由欧洲、美国等国外厂商生产的,使用的ABS控制算法也以国外厂商的为主,因此,开发基于ARM芯片的ABS控制器,并进行适应我国实际路况和驾驶环境的控制算法研究与开发,并具有较高的现实意义。
二、研究目的及内容本文旨在研究ABS控制算法及其在基于ARM芯片的控制器开发中的应用。
具体研究内容包括:1. ABS控制算法的原理及分类。
阐述ABS控制算法的基本原理和分类,比较几种主流的ABS控制算法优缺点。
2. 基于ARM芯片的ABS控制器的设计与开发。
介绍基于ARM的控制器硬件选型、系统架构设计、软件开发及调试等内容。
3. 适应我国实际路况和驾驶环境的ABS控制算法的研究。
重点研究我国道路状况复杂和驾驶环境特点,提出适应性更好的ABS控制算法,为基于ARM芯片的控制器的应用提供技术支撑。
三、研究方法及进度安排本文采取文献研究法和实验法相结合的研究方法。
首先,从国内外公开的文献中查阅ABS控制算法和基于ARM芯片的控制器开发的相关资料,分析其优缺点及研究现状。
其次,通过对ABS控制器硬件选型、系统架构设计、软件开发及调试等方面的研究,开发基于ARM芯片的ABS控制器。
制动防抱死控制系统(Anti-Lock brake system 简称ABS)是一种车辆主动安全
控制系统,它可以使车辆在紧急制动过程中,车轮仍然可以滚动,保证转向轮的可操
纵性,同时防止由于后轮抱死而导致的汽车侧滑甩尾,提高制动方向稳定性;有效地
利用轮胎与路面间的附着能力,缩短制动距离;减少轮胎的磨损,提高轮胎使用寿命,
同时减少粉尘对空气的污染、
原理:由装在车轮上的转速传感器采集四个车轮的转速信号,送到电子控制单元计算出每
个车轮的转速成,进而推算出车辆的减速度及车轮的滑移率。
?ABS电子控制单元根据计算出的参数,通过液压控制单元调节制动过程的制动压力,达到防止车轮的抱死的目的,在ABS不起作用时,电子制动力分配系统仍可调节后轮制动力,保证后轮不会先于前轮抱死,以保证车辆的安全
ABS控制方法
1.逻辑门限值控制方法
在逻辑门限值控制方法中,选取车轮滑移率和车轮减速度作为调节参数,在控制软件中分别对这两个调节参数预置多个逻辑门限值,ABS的控制软件根据车轮滑移率和车轮减速度是否达到某一设定的门限值,来识别车轮的运动状态,进而采取相应的增压、保压或减压措施
2.基于制动器耗散功率的ABS控制方法
基于制动器耗散功率的ABS控制方法的思路是:汽车减速制动的过程,实质是
将汽车的运动动能转化为其他形式的能量耗散掉的过程。
在应急制动时,安装摩擦式
制动器的汽车的运动动能主要通过制动器摩擦力作功和轮胎与地面摩擦力作功两种
方式转化为热能耗散掉。
由于不希望车轮抱死,轮胎与地面摩擦力应适当;而制动器
的耗散功率应最大,即汽车的动能通过制动器摩擦力作功转化为热能的速率最快,则
有可能保证汽车具有较好的制动性能。
据此推理,若取制动器耗散功率为目标函数,
利用最优控制的方法调节制动力矩,使得目标函数取得最大值,则有可能将车轮滑移
率控制在理想的范围内,实现ABS的控制功能
车身速度确定的算法
1)斜率法
随着路面附着状况不同,汽车紧急制动时的平均车身减速度不同,但在同一路面上进行紧急制动时,车身速度几乎均匀变化。
通过确定初始制动速度
接下来车身减速度的
确定:直道上,在不同工况下(不同路面、不同初始速度、不同载荷、不同驾驶员等)利用
五轮仪传感车身速度,利用自制的车速采集板采集车身速度,利用安装在制动管路上的4个压力传感器分别测量前、后、左、右4个制动管路的制动液压力,对大量的车身速度试验数据进行统计分析,可确定在直道上各种紧急制动工况下的车身减速度大小.。
初始制动速度v0的确定
汽车在直线行驶过程中施加紧急制动,制动过程可以分为两个阶段,如图4所示。
第一阶段为制动踏板空行程消除和制动管路压力初始建立阶段,在此阶段由于制动器制动力矩较小,地面制动力也较小,导致车轮减速度较小和车身减速度较小,车轮滑移率维持在较小值范围内,但车轮减速度和车身减速度处于渐增过程中
第二阶段由于制动器制动力矩和地面制动力都较大,导致车身速度快速下降,但在此阶段由于地面制动力稳定,使得车身减速度变化较小。
从图4中可以看出,在两阶段分界点处,车轮减速度发生突变,此时的车轮速度较接近车身速度,而后车身速度几乎按直线规律减小,故可以将此时的车轮速度作为初始制动速度v0。
在实际工程应用过程中,通过车轮减速度的突变来识别两阶段的分界点,并且通过经验数据补偿车轮速度和车身速度的差值
2.汽车在行驶过程中施加制动时,由于车轮滑移率的存在并且当车轮滑移率大于零
时,车轮速度就会小于车身速度,但四个车轮轮速的最大值最接近于实际车身速度,
故将其作为车身速度的估计值
路面识别
1.利用仪器识别路面,通过试验仪器直接对路面附着系数进行测量是一种最简单的方法
2.利用传感器识别路面,通过对采自特定路面的数字图像和噪声信号进行分析处理并从中抽取路面特征的方法是近年来在车辆所处道路状况识别及分类研究中较新的途径
3.
路面识别
制动力矩数据来源于车轮扭矩传感器,车速数据来源于五轮仪。
轮速数据和制动压力数据来源于试验车上安装的磁电式轮速传感器和压力传感器。
驾驶员紧急踩下制动踏板,控制器根据控制参数对车轮进行保压控制试验,发现紧急制动时,同种路面上车身减速度几乎为常量;对车轮进行保压控制后,同种路面上车轮减速度
几乎为常量;对车轮进行保压控制后,车轮速度的斜率和车身速度的斜率几乎相等。
所以本
文提出了基于估计车身减速度的路面识别方法。