IPM自举电路设计难题探讨
- 格式:doc
- 大小:7.51 KB
- 文档页数:3
文章编号:CAR216变频空调智能功率模块自举电路设计过程中的若干关键问题研究宋洪强 范永盛 陆汉宁(海信科龙空调有限公司)摘 要 介绍了家用变频空调中用于压缩机驱动的智能功率模块自举电路的基本拓扑结构和原理。
在理论分析的基础上,对外部门极电阻、自举电阻、自举二极管和自举电容的选型方法进行了研究和探讨,并围绕电路的可靠性和适应性对各关键器件的参数进行了优化。
为了避免自举电容初始充电时的电流冲击,文章给出了优化的初始充电方法。
实验测试表明经过优化的自举电路具有较高的可靠性和较好的适应性。
关键词 自举电路 自举电阻 自举二极管 自举电容 外部门极电阻0 引言当前,智能功率模块(Intelligent Power Module:IPM)已经广泛应用于家用变频空调压缩机驱动电路中。
IPM 模块通过将功率器件、驱动电路和保护电路高度集成在一块很小封装基板上,在大大简化了压缩机驱动电路复杂性的同时有效提高了电路的可靠性。
为了简化设计,驱动电路已普遍采用单控制电源方案。
这样既要保证控制电源能够为P 侧功率器件提供正确的门极偏置电压又要保证直流母线上的高压不致串到控制电源电路而烧坏元器件。
能够实现这一目的的方法很多,本文将重点讨论自举电路法。
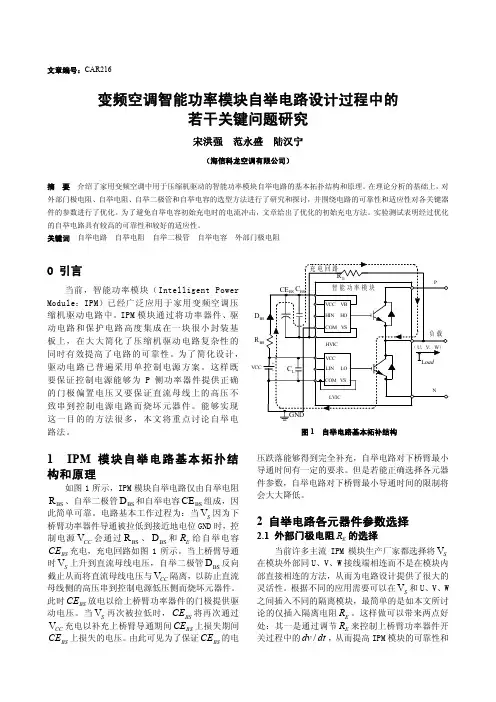
1 IPM 模块自举电路基本拓扑结构和原理如图1所示,IPM 模块自举电路仅由自举电阻BS R 、自举二极管BS D 和自举电容BS CE 组成,因此简单可靠。
电路基本工作过程为:当V S 因为下桥臂功率器件导通被拉低到接近地电位GND 时,控制电源V CC 会通过BS R 、BS D 和E R 给自举电容BS CE 充电,充电回路如图1所示。
当上桥臂导通时V S 上升到直流母线电压,自举二极管BS D 反向截止从而将直流母线电压与V CC 隔离,以防止直流母线侧的高压串到控制电源低压侧而烧坏元器件。
此时BS CE 放电以给上桥臂功率器件的门极提供驱动电压。
当V S 再次被拉低时,BS CE 将再次通过V CC 充电以补充上桥臂导通期间BS CE 上损失期间BS CE 上损失的电压。
600v单片集成ipm高压侧栅极驱动电路设计
设计一个600V单片集成IPM(智能功率模块)高压侧栅极驱动电路需要考虑到多个因素,包括电压等级、驱动能力、隔离要求、电磁兼容性等。
以下是一个基本的设计步骤和考虑因素:
1. 电压等级和安全裕量:考虑到600V的电压等级,设计时应留有足够的
安全裕量。
通常,实际应用中的电压可能高于或低于标称值,因此设计时应考虑这些极端情况。
2. 驱动能力:栅极驱动电路需要能够提供足够的电流来驱动IPM的功率开关。
这需要根据具体的IPM规格来确定。
3. 隔离要求:在高压应用中,隔离是关键。
需要考虑使用光耦、磁耦或者
其他隔离技术来确保电路的安全运行。
4. 电磁兼容性(EMC):设计时需要考虑到EMC问题,如减小噪声、防
止电磁干扰等。
这可能涉及到滤波、屏蔽等措施。
5. 集成单片设计:考虑到单片集成的要求,应选择合适的芯片工艺和封装
形式。
同时,电路设计应尽量简洁高效,以减小芯片面积和成本。
6. 可靠性:在设计时应考虑采用一些可靠性措施,如降额设计、热设计等,以增强电路的稳定性。
7. 保护功能:考虑加入过流保护、过压保护、欠压保护等功能,以防止电
路在异常情况下受损。
8. 测试与验证:在设计完成后,需要进行充分的测试和验证,以确保电路的功能和性能满足要求。
具体设计时,还需要根据具体的IPM规格书和实际应用需求来进行调整。
如果需要更详细的设计指导或者具体电路图,建议寻求专业电子工程师的帮助。
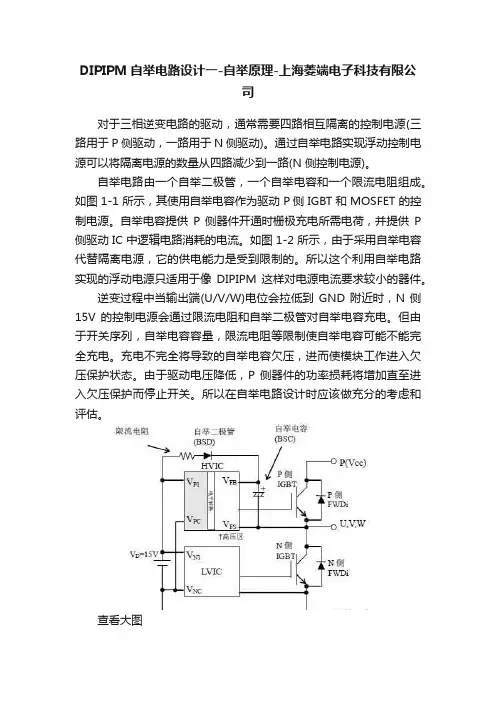
DIPIPM自举电路设计一-自举原理-上海菱端电子科技有限公司对于三相逆变电路的驱动,通常需要四路相互隔离的控制电源(三路用于 P 侧驱动,一路用于 N 侧驱动)。
通过自举电路实现浮动控制电源可以将隔离电源的数量从四路减少到一路(N 侧控制电源)。
自举电路由一个自举二极管,一个自举电容和一个限流电阻组成。
如图 1-1 所示,其使用自举电容作为驱动 P侧 IGBT 和 MOSFET 的控制电源。
自举电容提供P 侧器件开通时栅极充电所需电荷,并提供P 侧驱动 IC 中逻辑电路消耗的电流。
如图 1-2 所示,由于采用自举电容代替隔离电源,它的供电能力是受到限制的。
所以这个利用自举电路实现的浮动电源只适用于像DIPIPM 这样对电源电流要求较小的器件。
逆变过程中当输出端(U/V/W)电位会拉低到GND 附近时,N 侧15V 的控制电源会通过限流电阻和自举二极管对自举电容充电。
但由于开关序列,自举电容容量,限流电阻等限制使自举电容可能不能完全充电。
充电不完全将导致的自举电容欠压,进而使模块工作进入欠压保护状态。
由于驱动电压降低,P 侧器件的功率损耗将增加直至进入欠压保护而停止开关。
所以在自举电路设计时应该做充分的考虑和评估。
查看大图查看大图自举电路工作原理:电压自举,就是利用电路自身产生比输入电压更高的电压。
基于电容储能的电压自举电路通常是利用电容对电荷的存储作用来实现电荷的转移,从而实现电压的提升。
电压自举电路利用电荷转移的方式进行工作,通过存储电容,把电荷从输入转移到输出,提供负载所需要的电流。
Vbs(驱动电路Vb 和Vs 管脚之间的电压差)给集成电路高端驱动电路提供电源。
该电源电压必须在10-20V之间,以确保驱动集成电路能够完全地驱动MOS栅极器件(IGBT)。
Vbs电源是悬浮电源,附加在Vs 电压上(Vs通常是一个高频的方波)。
有许多方法可以产生Vbs悬浮电源,其中一种如本文中介绍的自举方式。
这种方式的好处是简单、低廉,但也有局限性。
ipm模块自举电容短路
如果IPM模块的自举电容出现短路,可能会导致以下问题:
1. 自举电路无法正常工作:自举电容是用于给IPM模块提供激励电压的关键组件。
如果自举电容短路,就无法为IPM模块提供所需的电压,导致自举电路无法正常工作。
2. IPM模块无法启动:自举电容短路会导致IPM模块无法启动。
自举电容通过充电和放电过程提供激励电压,使IPM模块能够正常工作。
如果自举电容短路,就无法正常充电,使IPM模块无法启动。
3. 电路故障:如果自举电容短路,可能会导致电路的其他部分出现故障。
短路会引起过大的电流流动,可能会对其他电路元件产生过大的压力和电压,导致其损坏。
在发现IPM模块的自举电容出现短路时,应立即停止使用该模块,并进行维修或更换。
ipm自举电压波形
IPM(Intelligent Power Module,智能功率模块)的自举电压波形是指IPM在自举过程中的电压变化情况。
自举是指IPM在无外部电源的情况下,通过内部的电路来产生所需的驱动电压。
在IPM中,通常有一个内部的高压电源,通过一定的电路来将该高压电源转换为所需的驱动电压。
自举电压波形通常包括两个阶段:充电阶段和放电阶段。
在充电阶段,IPM的内部电路将高压电源的电能储存起来,以便在后续的放电阶段使用。
在这个阶段,电压波形通常呈现出逐渐上升的趋势,直到达到所需的驱动电压。
在放电阶段,IPM的内部电路将储存的电能释放出来,为后续的功率开关操作提供所需的电压。
在这个阶段,电压波形通常呈现出稳定的平台状态,以保持驱动电压的稳定性。
需要注意的是,IPM的自举电压波形受到IPM内部电路设计和控制策略的影响,因此具体的波形特征可能会有所不同。
此外,由于IPM的自举电压是通过内部电路产生的,因此其电压范围和稳定性可能会受到一些限制。
IPM驱动和保护电路的研究摘要:介绍了IPM的基本工作特性和常用IPM驱动和保护电路的设计方法,并给出了一个驱动和保护电路的设计实例。
关键词:IGBT(绝缘栅双极性晶体管) IPM(智能功率模块) PIC(功率集成电路)智能功率模块(IPM)是Intelligent Power Module的缩写,是一种先进的功率开关器件,具有GTR(大功率晶体管)高电流密度、低饱和电压和耐高压的优点,以及MOSFET(场效应晶体管)高输入阻抗、高开关频率和低驱动功率的优点。
而且IPM内部集成了逻辑、控制、检测和保护电路,使用起来方便,不仅减小了系统的体积以及开发时间,也大大增强了系统的可靠性,适应了当今功率器件的发展方向——模块化、复合化和功率集成电路(PIC),在电力电子领域得到了越来越广泛的应用。
本文以三菱公司PM100DSA120为例,介绍IPM的基本特性,然后着重介绍IPM的驱动和保护电路的设计。
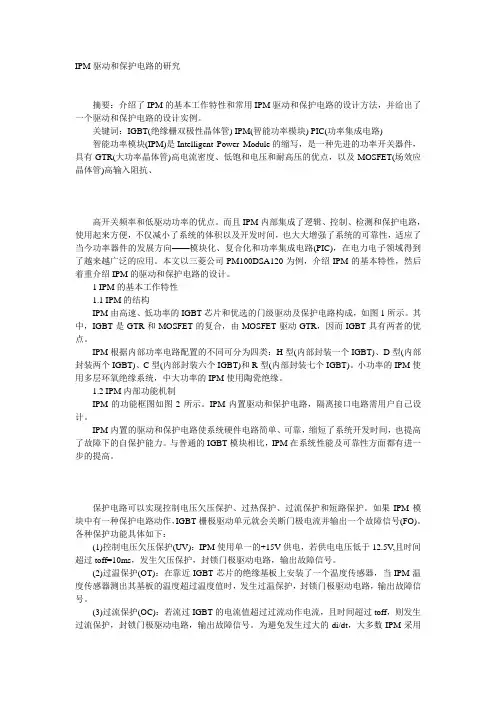
1 IPM的基本工作特性1.1 IPM的结构IPM由高速、低功率的IGBT芯片和优选的门级驱动及保护电路构成,如图1所示。
其中,IGBT是GTR和MOSFET的复合,由MOSFET驱动GTR,因而IGBT具有两者的优点。
IPM根据内部功率电路配置的不同可分为四类:H型(内部封装一个IGBT)、D型(内部封装两个IGBT)、C型(内部封装六个IGBT)和R型(内部封装七个IGBT)。
小功率的IPM使用多层环氧绝缘系统,中大功率的IPM使用陶瓷绝缘。
1.2 IPM内部功能机制IPM的功能框图如图2所示。
IPM内置驱动和保护电路,隔离接口电路需用户自己设计。
IPM内置的驱动和保护电路使系统硬件电路简单、可靠,缩短了系统开发时间,也提高了故障下的自保护能力。
与普通的IGBT模块相比,IPM在系统性能及可靠性方面都有进一步的提高。
保护电路可以实现控制电压欠压保护、过热保护、过流保护和短路保护。
如果IPM模块中有一种保护电路动作,IGBT栅极驱动单元就会关断门极电流并输出一个故障信号(FO)。
ipm自举电压波形-回复什么是IPM自举电压波形?IPM自举电压波形是指集成功率模块(Integrated Power Module,简称IPM)在自举电压条件下的电压波形。
自举电压是指通过IPM内部的驱动电路来驱动IPM的功率开关管,在闭环控制下产生一定的输出电压波形。
IPM自举电压波形对于电力系统的稳定性和无功补偿具有重要作用。
下面将一步一步回答您对IPM自举电压波形的一些问题。
1. IPM自举电压波形的作用是什么?IPM自举电压波形在电力系统中起到了重要的作用,具体包括:(1) 提供稳定的驱动电压:IPM自举电压波形可以通过控制IPM内部的电路来提供稳定的驱动电压,确保功率开关管的正常工作,从而保持电力系统的稳定性。
(2) 实现电流的准确控制:IPM自举电压波形可以通过控制IPM内部的电路来实现对电流的准确控制,从而实现对电力系统的无功补偿,提高电力系统的功率因数。
(3) 保护电力设备:IPM自举电压波形可以通过控制IPM内部的电路来保护电力设备,如过流保护、过温保护等,从而延长电力设备的使用寿命。
2. IPM自举电压波形是如何产生的?IPM自举电压波形的产生过程主要包括以下几个步骤:(1) 输入电压检测:IPM首先通过电压传感器检测输入电压的大小。
(2) 控制信号生成:根据输入电压的大小,IPM内部的驱动电路会生成相应的控制信号,用于控制功率开关管的通断动作。
(3) IPM自举电压累积:控制信号通过驱动电路传递给IPM内部的自举电路,产生一定的自举电压。
(4) 电压波形调整:根据需要,IPM可以通过控制驱动电路的工作方式来调整自举电压的波形,使其满足电力系统的要求。
(5) 输出电压反馈:IPM会对输出电压和电流进行检测,并通过反馈信号控制驱动电路,实现闭环控制和电流的准确控制。
3. 如何优化IPM自举电压波形?为了优化IPM自举电压波形,可以从以下几个方面进行考虑:(1) 驱动电路设计:合理设计IPM内部的驱动电路,确保其能够快速、准确地产生自举电压,并具有较好的稳定性。
IPM自举分析与研究
李勇;李园园
【期刊名称】《电力设备管理》
【年(卷),期】2024()6
【摘要】IPM是一种新型的半导体功率开关模块,集成了保护、驱动、控制等功能,广泛应用于工业、家电、电动车等领域。
IPM模块如果要可靠运行,自举电路的设计就显得尤为重要。
本文首先分析了自举电路的结构以及工作过程;接下来详细分析了自举电路初始化充电中单脉冲和多脉冲的充电路径以及波形;然后分析了系统运行时充电时自举电容的电压波动过程;最后根据自举电容的电压波动、提出了根据电压波动计算充电电容大小的方法,以及如何选择限流电阻的阻值的依据。
【总页数】3页(P222-224)
【作者】李勇;李园园
【作者单位】中山职业技术学院
【正文语种】中文
【中图分类】TM9
【相关文献】
1.IPM自举电路设计过程中的关键问题研究
2.TMS320VC5416 DSP自举引导方法的分析与研究
3.江浙沪能源消费与经济增长关系的研究——基于自举面板因果检验和VAR模型的实证分析
4.金融发展与储蓄投资转化率研究r——基于我国省级面板数据自举因果检验的实证分析
因版权原因,仅展示原文概要,查看原文内容请购买。
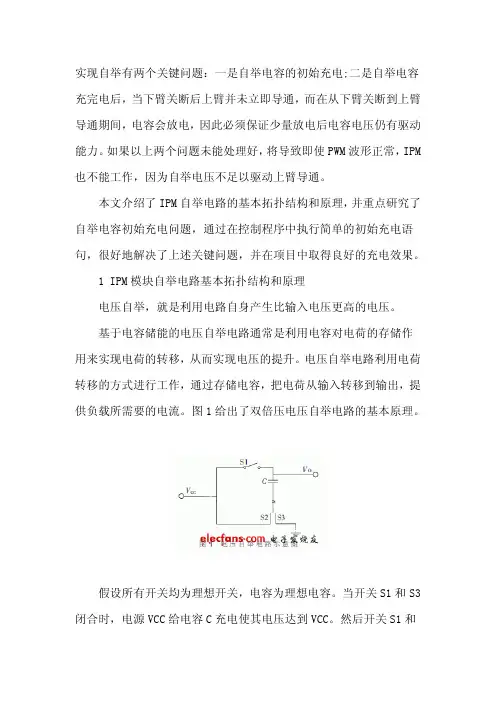
实现自举有两个关键问题:一是自举电容的初始充电;二是自举电容充完电后,当下臂关断后上臂并未立即导通,而在从下臂关断到上臂导通期间,电容会放电,因此必须保证少量放电后电容电压仍有驱动能力。
如果以上两个问题未能处理好,将导致即使PWM波形正常,IPM 也不能工作,因为自举电压不足以驱动上臂导通。
本文介绍了IPM自举电路的基本拓扑结构和原理,并重点研究了自举电容初始充电问题,通过在控制程序中执行简单的初始充电语句,很好地解决了上述关键问题,并在项目中取得良好的充电效果。
1 IPM模块自举电路基本拓扑结构和原理电压自举,就是利用电路自身产生比输入电压更高的电压。
基于电容储能的电压自举电路通常是利用电容对电荷的存储作用来实现电荷的转移,从而实现电压的提升。
电压自举电路利用电荷转移的方式进行工作,通过存储电容,把电荷从输入转移到输出,提供负载所需要的电流。
图1给出了双倍压电压自举电路的基本原理。
假设所有开关均为理想开关,电容为理想电容。
当开关S1和S3闭合时,电源VCC给电容C充电使其电压达到VCC。
然后开关S1和S3断开,S2闭合,直接接到电容C的低压端,此时电容C上仍然保持有前一个相位存储的电荷VCC×C。
由于在S2闭合时,电容C上的电荷量不能突变,因此有:(V0-VCC)×C=VCC×C,即V0=2VCC。
在没有直流负载的情况下,通过图1所示的电路,在理想情况下,输出可达到输入电压的两倍。
2 自举电路设计中的关键问题研究本项目的IPM型号选用IGCM20F60GA[2]。
图2是IPM自举电路原理图。
由图2可知,自举元件一端接电路的输入部分,另一端接到同相位的输出电路部分,借输入、输出的同相变化,把自己抬举起来,即自举元件引入的是正极性的反馈。
对原理图中第一路自举电路进行分析[3-4]。
IPM模块自举电路仅由自举电阻R62、自举二极管D9和自举电容E1组成,因此简单可靠。
其电路基本工作过程为:当VS因为下桥臂功率器件导通被拉低到接近地电位GND时,控制电源VCC会通过R62和D9给自举电容E1充电。
基于PWM控制器和IPM模块的变频电源设计1. 摘要:采用智能型、高精度PWM控制器SA866和智能功率模块PS21255,设计了小功率变频电源。
该系统硬件电路简单,器件减少,结构紧凑,具有较高的性价比和灵活的适应性,安全可靠。
1前言随着电力电子技术、微电子技术和控制理论的发展,逆变器的稳定性和可靠性大幅度提高,各种逆变器在各行业中应用十分广泛,变频调速技术发展日新月异。
目前最常用的是采用正弦脉宽调制技术SPWM的变频电源,利用这种变频电源驱动的电力拖动系统,具有效率高、转矩波动小、噪声低、响应快、调速特性好、运行可靠、控制特性优良等优点。
SPWM技术及其控制性能越来越完善,专用PWM集成电路相继问世,在变频电源和调速控制中应用越来越广,使系统电路简单,控制调节方便,具有很高的智能性。
常用的电力电子全控型功率半导体器件有晶闸管、功率场效应管、双极型晶体管等。
功率场效应管具有开关速度高、电压控制实现简单等优点,但是器件导通时压降较大,且电压、电流容量相对较小;双极型晶体管的优缺点则正好与功率场效应管的优缺点相反。
绝缘栅一双极型晶体管(简称IGBT)是功率场效应管与双极型晶体管所形成的复合器件,综合了两者的优点,广泛应用于各种大中型电力电子装置中。
各种分立型功率器件需要设计专门的驱动电路才能实现使器件工作在开关状态并获得较低的动静态损耗的效果。
而随着功率器件工作频率不断提高,分立元件固有的引线电感、寄生电容等对器件造成了更大的电应力,主要表现为过电压、过电流尖峰。
因此在电源设计中采用智能功率模块(IPM),将功率器件、驱动电路和各种保护电路集成到同一模块内,较好地解决了寄生电感和电容的影响。
IPM模块对电源电路和驱动电路的引线设计进行了优化处理,所以浪涌电压、门极振荡、噪声干扰等问题得到有效控制,能够实现更快的开关速度,降低系统的复杂性并提高系统的可靠性。
2 变频电源的系统结构变频电源的主电路采用交一直一交电压型变频电路,主要由整流、滤波、逆变组成。
ipm自举电压波形-回复标题:探索电压波形的魅力:IPM自举电压波形解析导言:在电子领域的发展中,电压波形是一个重要的研究方向。
其中,IPM自举电压波形是一种应用广泛的技术,本文将以此为主题,对IPM自举电压波形进行深入分析,旨在阐明其原理、特点及在实际应用中的优势。
第一部分:IPM自举电压波形的定义及原理1.1 IPM自举电压波形的定义IPM自举电压波形即Isolated Gate Bipolar Transistor(隔离栅极双极性晶体管)自举电压波形,是一种用于电子器件中的电压波形。
1.2 IPM自举电压波形的原理IPM自举电压波形的原理是通过特殊的电路设计将输出电压自动引导到输入电压上,从而实现电压波形的变换。
这种原理通过开关和电阻之间的配合实现,在输入电压相对较低的情况下,IPM自举电压波形可提供一个较高的输出电压,实现电子设备的正常运行。
第二部分:IPM自举电压波形的特点及应用2.1 IPM自举电压波形的特点IPM自举电压波形具有以下几个显著特点:- 高效性:IPM自举电压波形通过电路的设计,能够在输入电压较低的条件下,提供一个相对较高的输出电压,从而使得电子设备能够正常工作。
- 稳定性:IPM自举电压波形的电路设计经过精心调试,能够保证输出电压的稳定性,在电子器件中具有非常重要的应用价值。
- 灵活性:IPM自举电压波形可以根据不同的实际需求进行设计和调整,适应不同场景下的电子设备工作要求。
2.2 IPM自举电压波形的应用IPM自举电压波形主要应用于电子设备中,包括但不限于以下领域:- 电源供应:IPM自举电压波形能够为电子设备提供稳定的电源供应,使得设备能够正常运行,应用广泛。
- 通信设备:在无线通信设备中,IPM自举电压波形能够提供可靠的电源供应,保证通信设备的正常传输。
- 工业自动化:在工业自动化设备中,IPM自举电压波形能够提供高效、稳定的电压输出,为设备的正常运行提供保障。
IPM 智能模块的电路设计原理1、引言电力系统中大功率电力电子装置的开关元件主要是晶闸管和GTO。
但是,随着近年来双极功率晶体管及功率MOSFET的问世以及生产技术的成熟,这些开关元件凭借自身优越的性能逐渐替代了晶闸管和GTO,并朝着节能、轻便、小型化的方向迅速发展。
IGBT-IPMIntelligent Power Module)智能模块正是其中的代表之一,它将IGBT单元、驱动电路、保护电路等结合在一个模块之中,利用这些优越的特性可极大地提高实际应用系统的稳定性,同时可简化设计的难度,缩小装置的体积。
N B W V U P图1 IPM内部结构图前置驱动前置驱动前置驱动前置驱动前置驱动前置驱动前置驱动16121415101378945611123过热保护电路图10-12、IGBT智能模块的主要特点与过去IGBT模块和驱动电路的组合电路相比,IGBT-IPM内含驱动电路且保护功能齐全,因而可极大地提高应用系统整机的可靠性。
本文将要介绍的是富士电机最新推出的R系列IPM智能功率模块7MBP100RA-120的主要特点和使用情况。
它除了具有体积小、可靠性高、价格低廉等优点以外,还具有以下主要功能:●内含驱动电路。
该模块同时具有软开关特性,可控制IGBT开关时的dV/dt和浪涌电压;用单电源驱动时,无需反向偏压电源;并可防止误导通。
关断时,IGBT栅极低阻抗接地可防止噪音等引起VGE上升而误导通;模块中的每个IGBT的驱动电路都设计了最佳的驱动条件。
●内含各种保护电路。
每个IGBT都具有过流保护(OC)、负载短路保护(SC)、控制电源欠压保护(UV)和过热保护(OH)等功能。
反例:DC电路连接正例:三极管CE 与光耦连接图10-2●内含报警输出功能。
当出现上述保护动作时,可向控制IPM的微机系统输出报警信号。
●包含有制动电路。
内含制动单元的IPM模块,用此单元可以抑制PN端子间的电压升高。
图10-1为该IGBT-IPM智能模块的内部结构图,图中的前置驱动部分包括驱动放大、短路保护、过流保护、欠压闭锁、管心过热保护等功能电路。
电机驱动电路模块IPM模块自动测试平台的研究及实现自动测试平台的研究及实现IPM作者:王小妮,杨根兴摘要: IPM测试需测试多个参数,这些不同的参数需不同的测试平台。
本文研究了对各种不同参数的测试方法及其所需平台,进一步研究并实际实现了自动测试平台。
关键词:智能功率模块;IGBT;自动测试平台问题的提出火车机车动力系统中普遍使用智能功率模块IPM(Intelligent Power Module)。
IPM是电力集成电路(Power Integrated Circuit——PIC)的一种,集功率器件(IGBT)、驱动电路和保护功能于一体,内部含有门极驱动控制、故障检测和多种保护电路,其核心器件是IGBT。
实际使用过程中,由于没有简单的方法判断出IPM质量的好坏,一旦IPM出现了质量疑问就只能丢弃,造成了极大的浪费。
因此,对IPM器件的性能测试有着重要的实际意义。
本测试中的IPM器件型号为PM300DSA120,根据测量出的各个参数值参考各个参数标准来评定这种器件的好坏。
此IPM器件测试系统受北京铁路局有关部门委托开发,现已投入实际使用。
IPM测试系统的各种测试参数对IPM—PM300DSA120器件进行有关参数测试。
测试参数见下表:表一IPM PM300DSA120型号参数表序号符号参数条件典型值1 Vce(sat) 集电极-发射极饱和电压 VD=15V,VCIN=0V 2.3VIC=300A 常量2 Ices 集电极发射极截止电流 VCE=VCES,VCIN=5V <1mA3 Vces 栅极发射极短路时, VD=15V,VCIN=0V >1200V集电极-发射极电压 ICE给定值,测VCE4 ton, 开通时间(0.5us VD=15V,VCIN=0-5V 1.4ustrr, 上升时间(trr<0.4us) VCC=600V,IC=300A 0.2ustc(on), 开通延迟时间(tc(on)<1.0us) 常温 0.4ustoff, 关断时间(toff<3.5us) 2.5ustc(off) 关断延迟时间(tc(off)<1.1us) 0.6us多种测试平台的需求由于要测量的IPM器件具有两个性能完全相同,但极性相反的IGBT(N块和P 块)组成,因此在设计测试平台时应注意按两套独立的电路,即N模块及P模块测试电路设计。
IPM自举电路设计难题探讨
自举电路自举电路自举电路的基本拓扑结构和原理,并重点研究了自举电容初始充电问题,通过在控制程序中执行简单的初始充电语句,很好地解决了上述关键问题,并在项目中取得良好的充电效果。
1 IPM模块自举电路基本拓扑结构和原理
电压自举,就是利用电路自身产生比输入电压更高的电压。
基于电容储能的电压自举电路通常是利用电容对电荷的存储作用来实现电荷的转移,从而实现电压的提升。
电压自举电路利用电荷转移的方式进行工作,通过存储电容,把电荷从输入转移到输出,提供负载所需要的电流。
图1给出了双倍压电压自举电路的基本原理。
假设所有开关均为理想开关,电容为理想电容。
当开关S1和S3闭合时,电源VCC给电容C充电使其电压达到VCC。
然后开关S1和S3断开,S2闭合,直接接到电容C的低压端,此时电容C上仍然保持有前一个相位存储的电荷VCC×C。
由于在S2闭合时,电容C上的电荷量不能突变,因此有:(V0-VCC)×C=VCC×C,即V0=2VCC。
在没有直流负载的情况下,通过图1所示的电路,在理想情况下,输出可达到输入电压的两倍。
2 自举电路设计中的关键问题研究
本项目的IPM型号选用IGCM20F60GA[2]。
图2是IPM自举电路原理图。
由图2可知,自举元件一端接电路的输入部分,另一端接到同相位的输出电路部分,借输入、输出的同相变化,把自己抬举起来,即自举元件引入的是正极性的反馈。
对原理图中第一路自举电路进行分析[3-4]。
IPM模块自举电路仅由自举电阻R62、自举二极管D9和自举电容E1组成,因此简单可靠。
其电路基本工作过程为:当VS因为下桥臂功率器件导通被拉低到接近地电位GND时,控制电源VCC会通过R62和D9给自举电容E1充电。
当上桥臂导通,VS上升到直流母线电压后,自举二极管D9反向截止,从而将直流母线电压与VCC隔离,以防止直流母线侧的高压串到控制电源低压侧而烧坏元器件。
此时E1放电,给上桥臂功率器件的门极提供驱动电压。
当VS再次被拉低时,E1将再次通过VCC充电以补充上桥臂导通期间E1上损失的电压。
这种自举供电方式就是利用VS端的电平在高低电平之间不停地摆动来实现的。
,自举电路给E1充电,E1的电压基于上桥臂输出晶体管源极电压上下浮动。
由于运行过程中反复地对自举电容进行充放电,因此必须选择适当的参数,保证自举电容上的电压在电机运行时保持高于欠压锁定电平。
由上述分析可知,要保证E1的跌落电压能够得到及时、完全的补充,自举电路对下桥臂最小导通时间有一定的要求。
但是若能正确选择各元器件参数,自举电路对下桥臂最小导通时间的限制将会大大降低。
2.1 自举电容E1的选择
自举电容E1需要根据自举电容所能得到的最低充电电压来选择。
实际应用中可以应用以下简化公式来初步计算E1:
式中,ΔVBS为自举电路在上桥臂功率器件导通时所允许的最大电压降,VF为自举二极管正向压降,VBSmin为所要求的最低上桥臂驱动电压,VBSUV为上桥臂控制电压的欠压保护值,Vsat为下桥臂功率器件的饱和压降,THON为上桥臂的最大导通时间,ILeak为IPM 模块规格书中所提供的上桥臂功率器件驱动所需的最大额定电流值。
这样只要选定ΔVBS即可快速计算出E1。
但是考虑到各元器件参数的分布性和应用电路的可靠性,实际使用的E1应当选择为计算值的2~3倍。
本项目选择的是47 μF/25 V的电解电容。
2.2 自举电阻R62的选择
自举电阻R62的作用是限制dVBS/dt。
为了保证自举电容能够在下桥臂最小导通时间充电ΔVBS,所以:
式中,TLON为下桥臂的最小导通时间。
本项目中自举电阻R62取22 Ω。
2.3 自举二极管D9的选择
因为自举二极管起到隔离直流母线高压和控制电源低压的作用,必须阻断直流干线上的高压,才能保护IC器件不受损坏, 所以选择D9时应当重点考虑二极管耐压、反向截止时间和正向导通电压降几个参数。
二极管承受的电流是栅极电荷与开关频率之积。
为了减少电荷损失,应选择耐高压的反向漏电流小的超快恢复二极管。
本项目选用的自举二极管型号为BYV36C。
3 自举电容初始充电过程及控制方法
3.1 初始充电分析及实现程序
在自举电容的初始充电过程中,较大的初始充电电流有可能给系统可靠性带来不利影响。
这是因为较大的电流冲击一方面对控制电源器件造成冲击,另一方面增大了初始充电阶段上下桥臂直通的风险。
由此可见应当尽量避免下桥臂长时间开通的自举电容初始充电方法。
实际应用中可采用脉冲串的方法,分多次给自举电容充电,直到自举电容充满。
这样可有效减小初始充电过程中的充电电流。
本项目采用瑞萨SH7125作为控制芯片,软件上采用了一种简单实用的方法实现了自举电容的初始充电。
具体的做法是:在每次更新PWM占空比时,先判断占空比的值,若小于0.056,则认为电机的给定速度为零,并以此作为进入充电程序的判断条件。
如下面的程序所示:if(revison_value < 0.056)
{
MTU2.TOER.BYTE = 0x38; /*禁止上桥臂输出*/
hall.HallPointer = (hall.HallPointer + 1)%6;
MTU23.TGRD = 1900;/*设定占空比*/
MTU24.TGRC = 1900;/*设定占空比*/
MTU24.TGRD = 1900;/*设定占空比*/
pwm_calc();/*占空比更新函数*/
}
由上述程序可知,通过程序预定的方式给定直流无刷电机的换相顺序,使得 U、V、W 三相进行错位充电,即每一次只给某一相的自举电容充电并依次循环直到三相都充满。
该控制程序的优点在于上臂被禁止输出,所以不存在上下臂直通的危险,且只要占空比小于0.056时就对自举电容充电,能保证自举电容能充满。
通过将初始充电控制语句放在PWM 更新函数里,保证了初始充电的实时性,很好地解决了实现自举的关键问题。
3.2 自举电压波形及分析
图3是实测的自举电压波形。
由图3分析可知,初始充电近似阶跃函数。
在0.1 s时,就能充电到14 V,即上述初始充电程序能快速完成初始充电;在0.2 s时,电机开始运行,自举电容放电。
由图3还可知,在运行阶段,自举电容电压基本稳定在14 V,几乎在电机停止的瞬间,自举电容电压迅速充电到15 V,然后开始慢慢放电。
由上述分析可知,本项目采用的自举电容初始充电的方法简单实用,在实际项目应用中取得良好的效果。
本文分析了自举电路的基本原理,保证了充电的实时性,在应用中取得了良好的IPM驱
动效果,为自举电容的初始充电提供了一个简单实用可靠的方案。
总之,要在理论指导的基础上,使得控制算法和硬件参数紧密相关,并在实际系统反复调试并最终确定参数,以便最大程度地保证电路的可靠性。