雷达成像第1章
- 格式:pdf
- 大小:5.35 MB
- 文档页数:121


第一章引论一、填空1、我国新一代天气雷达业务组网的建设目标是:在我国东部和中部地区,装备〔〕和〔〕多普勒天气雷达系统。
2、根据我国雷达布局原则,在我国第二地形阶梯地域和黑龙江、吉林省布设〔〕频段新一代天气雷达。
3、根据我国雷达布局原则,在天气、气候相近的地区,组网的新一代天气雷达在〔〕和〔〕上要尽可能统一。
4、我国《新一代天气雷达系统功能规格需求书》要求:对大范围降水天气的监测距离应不小于〔〕km;对小尺度强对流天气现象的有效监测和识别距离应大于〔〕km。
5、我国《新一代天气雷达系统功能规格需求书》要求:雷达探测能力在50km处可探测到的最小回波强度S波段应不大于〔〕dBZ、C波段应不大于〔〕dBZ。
6、我国《新一代天气雷达系统功能规格需求书》要求新一代天气雷达应有一定的晴空回波探测能力,在湿润季节应能观测到〔〕km左右距离范围内的晴空大气中的径向风场分布。
7、新一代天气雷达系统的应用主要在于对灾害性天气,特别是风害和冰雹相伴随的灾害性天气的〔〕和〔〕。
它还可以进行较大范围降水的定量估测,获取降水和降水云体的〔〕。
8、从径向速度图像上可以看出气流的〔〕、〔〕和〔〕的特征,并可给出定性和〔〕的估算。
9、辐合〔或辐散〕在径向风场图像中表现为一个最大和最小的〔〕,两个极值中心的连线和雷达的射线〔〕。
10、气流中的小尺度气旋〔或反气旋〕在径向风场图像中表现为一个最大和最小的〔〕,中心连线走向于雷达射线〔〕。
11、具有辐合〔或辐散〕的气旋〔或反气旋〕表现出最大、最小值的连线与雷达射线走向〔〕。
根据中心连线的长度、径向速度最大值、最小值及连线与射线的夹角,可以半定量地估算气旋〔或反气旋〕的〔〕和〔〕。
12、新一代天气雷达采用〔〕体制,共有7种型号,其中S波段有3种型号,分别为〔〕。
C波段有4种型号,分别为CINRAD-〔〕。
13、SA和SB雷达的正式名称分别为CINRAD-SA和CINRAD-SB,在国际上称为〔〕。
第1章雷达概论Merrill I. Skolnik1.1 雷达描述雷达的基本概念相对简单,但在许多场合下它的实现并不容易。
它以辐射电磁能量并检测反射体(目标)反射的回波的方式工作。
回波信号的特性提供有关目标的信息。
通过测量辐射能量传播到目标并返回的时间可得到目标的距离。
目标的方位通过方向性天线(具有窄波束的天线)测量回波信号的到达角来确定。
如果是动目标,雷达能推导出目标的轨迹或航迹,并能预测它未来的位置。
动目标的多普勒效应使接收的回波信号产生频移,因而即使固定回波信号幅度比动目标回波信号幅度大多个数量级时,雷达也可根据频移将希望检测的动目标(如飞机)和不希望的固定目标(如地杂波和海杂波)区分开。
当雷达具有足够高的分辨力时,它能识别目标尺寸和形状的某些特性。
雷达可在距离上、角度上或这两方面都获得分辨力。
距离分辨力要求雷达具有大的带宽,角度分辨力要求大的电尺寸雷达天线。
在横向尺度上,雷达获得的分辨力通常不如其在距离上获得的分辨力高。
但是当目标的各个部分与雷达间存在相对运动时,可运用多普勒频率固有的分辨力来分辨目标的横向尺寸。
虽然人们通常认为SAR是通过在存储器中存储接收到的信号,从而产生大的“合成”天线,但是用于成像(如地形成像)的合成孔径雷达在横向尺度上获得的分辨力仍可解释为,是由于利用了多普勒频率分辨力的结果。
这两种观点(多普勒分辨力和合成天线)是等效的。
展望用于目标成像的ISAR所能得到的横向分辨力的途径,理所当然应该是多普勒频率分辨力。
雷达是一种有源装置,它有自己的发射机而不像大多数光学和红外传感器那样依赖于外界的辐射。
在任何气象条件下,雷达都能探测或远或近的小目标,并精确测量它们的距离,这是雷达和其他传感器相比具有的主要优势。
雷达原理已在几兆赫兹(高频或电磁频谱的高频端)到远在光谱区外(激光雷达)的频率范围内得到应用。
这范围内的频率比高达109:1。
在如此宽的频率范围内,为实现雷达功能而应用的具体技术差别巨大,但是基本原理是相同的。

第一章 绪论(重点)1、雷达的基本概念雷达概念(Radar),雷达的任务是什么,从雷达回波中可以提取目标的哪些有用信息,通过什么方式获取这些信息雷达概念:Radio Detection and Ranging 的缩写。
无线电探测和测距,无线电定位。
雷达的任务:雷达检测,目标定位,目标跟踪,目标成像,目标识别。
从雷达回波中可以提取目标的有用信息,获取方式: 目标信息 雷达提取 空间位置 距离 R=Ct/2 回波延时 方位 天线扫描 仰角速度 多普勒频移尺寸和形状 回波延时、多普勒频移2、目标距离的测量测量原理、距离测量分辨率、最大不模糊距离测量原理:通过接收信号的时间延迟进行测距 R=Ct/2 (t:滞后时间) 距离测量分辨率最大不模糊距离3、目标角度的测量角度分辨率角度分辨率:位于同一距离上的两个目标在方位角平面或仰角平面上可被区分的最小角度4、雷达的基本组成哪几个主要部分,各部分的功能是什么同步设备(Synchronizer):雷达整机工作的频率和时间标准。
发射机(Transmitter):产生大功率射频脉冲。
收发转换开关(Duplexer): 收发共用一副天线必需,完成天线与发射机和接收机连通之间的切换。
天线(Antenna):将发射信号向空间定向辐射,并接收目标回波。
接收机(Receiver):把回波信号放大,检波后用于目标检测、显示或其它雷达信号处理。
显示器(Scope):显示目标回波,指示目标位置。
天线控制(伺服)装置:控制天线波束在空间扫描。
电源第二章 雷达发射机1、雷达发射机的任务雷达发射机的任务:为雷达提供一个载波受到调制的大功率射频信号,经馈线和收发开关由天线辐射出去。
2、雷达发射机的主要质量指标雷达发射机的主要质量指标:工作频率或波段,输出功率,总效率,信号形式,信号稳定度3、雷达发射机的分类雷达发射机的分类:1、按调制方式: ①连续波发射机 ②脉冲发射机2、按工作波段:①短波②米波③分米波④厘米波⑤毫米波3、按产生信号方式 :①单级振荡式 ②主振放大式4、按功率放大使用器件: ①真空管发射机 ②固态发射机4、单级振荡式和主振放大式发射机组成, 以及各自的优缺点。
前言雷达成像技术是上个世纪50年代发展起来的,它是雷达发展的一个重要里程碑。
从此,雷达不仅仅是将所观测的对象视为“点”目标,来测定它的位置与运动参数,而是能获得目标和场景的图像。
同时,由于雷达具有全天候、全天时、远距离和宽广观测带,以及易于从固定背景中区分运动目标的能力,雷达成像技术受到广泛重视。
雷达成像技术应用最广的方面是合成孔径雷达(Synthetic Aperture Radar,简称SAR)。
当前,机载和星载SAR的应用已十分广泛,已可得到亚米级的分辨率,场景图像的质量可与同类用途的光学图像相媲美。
利用SAR的高分辨能力,并结合其它雷达技术,SAR还可完成场景的高程测量,以及在场景中显示地面运动目标(GMTI)。
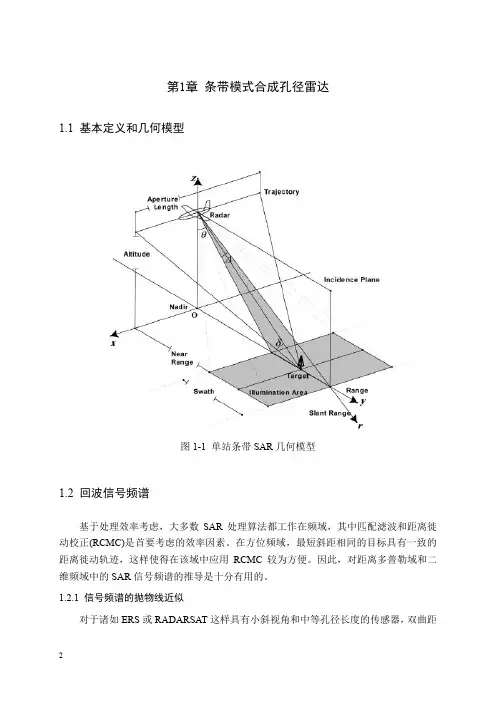
SAR的高分辨,在径向距离上依靠宽带带信号,几百兆赫的频带可将距离分辨单元缩小到亚米级;方向上则依靠雷达平台运动,等效地在空间形成很长的线性阵列,并将各次回波存贮作合成的阵列处理,这正是合成孔径雷达名称的来源。
合成孔径可达几百米或更长,因而可获得高的方位分辨率。
雷达平台相对于固定地面运动形成合成孔径,实现SAR成像。
反过来,若雷达平台固定,而目标运动,则以目标为基准,雷达在发射信号过程中,也等效地反向运动而形成阵列,据此也可对目标成像,通称为逆合成孔径雷达(ISAR)。
ISAR显然可以获取更多的目标信息。
最简单的雷达成像是只利用高距离分辨(HRR)的一维距离像。
当距离分辨率达米级,甚至亚米级时,对飞机、车辆等一般目标,单次回波已是沿距离分布的一维距离像,它相当目标三维像以向量和方式在雷达射线上的投影,其分布与目标相对于雷达的径向结构状况有关。
同时,高距离分辨率有利于分辨距离接近的目标,以及目标回波的直达波和多径信号。
本书将对当前已经广泛应用和具有应用潜力的内容作较为全面的介绍。
本书是《雷达技术丛书》中的一册,主要对象为从事雷达研制工作的技术人员,因此,本书编著时考虑到读者已有《雷达原理》和《雷达系统》方面的基础,对雷达各部件的基本情况也已比较熟悉,与上述内容有关的部分,本书均作了省略。
《雷达原理》第一章题集课程名称:雷达原理考试形式:课后练习满分:100 分---注意事项:1. 本题集共四部分,总分 100 分。
2. 请将答案写在答题纸上。
3. 所有题目必须回答,选择题请将正确答案的字母填在答题纸上,其余题目请将答案写清楚。
---第一部分选择题(共 20 题,每题 2 分,共 40 分)1. 雷达的基本工作原理是()A. 信号的反射B. 电磁波的传播C. 信号的放大D. 数据的处理2. 在雷达系统中,天线的主要作用是()A. 发射和接收电磁波B. 处理信号C. 记录数据D. 过滤噪声3. 雷达信号的脉冲宽度越短,分辨率()A. 越高B. 越低C. 不变D. 与天线有关4. 在连续波雷达中,目标的距离是通过()来测量的。
A. 信号的幅度B. 信号的相位C. 信号的频率D. 信号的时延5. 雷达的“多普勒效应”主要用于()A. 测量目标的速度B. 测量目标的距离C. 提高信号的强度D. 过滤杂波6. 在脉冲雷达中,回波信号的延迟时间与目标的()有关。
A. 速度B. 方向C. 距离D. 大小7. 雷达中“信号噪声比”通常用来衡量()A. 信号的强度B. 噪声的强度C. 信号质量D. 接收机的灵敏度8. 目标的回波信号强度与其()成正比。
A. 距离的平方B. 反射面积C. 速度D. 温度9. 雷达中的“波束宽度”主要影响()A. 雷达的探测范围B. 雷达的分辨率C. 信号的强度D. 天线的大小10. 相控阵雷达的主要优点是()A. 结构简单B. 能够快速改变波束方向C. 成本低D. 体积小11. 在雷达系统中,目标检测的基本步骤是()A. 发射信号、接收回波、处理信号B. 仅发射信号C. 仅接收回波D. 处理信号后发射12. 雷达成像的基本原理是()A. 利用信号的频率B. 利用信号的幅度C. 利用信号的相位信息D. 利用信号的时延13. 反射体的形状对雷达信号的影响主要体现在()A. 回波的强度B. 回波的时间C. 回波的频率D. 回波的相位14. 在雷达测距中,使用的公式为()A. 距离 = 光速×时间B. 距离 = 时间 / 光速C. 距离 = 光速 / 时间D. 距离 = 时间 + 光速15. 适合高空探测的雷达类型是()A. 地面雷达B. 空中雷达C. 卫星雷达D. 水面雷达16. 雷达中“脉冲重复频率”的增加将导致()A. 探测距离增加B. 探测范围增加C. 分辨率降低D. 分辨率提高17. 在合成孔径雷达中,成像的关键是()A. 信号的频率B. 运动的路径C. 发射的功率D. 目标的大小18. 关于“目标指向性”,下列说法正确的是()A. 只与目标的速度有关B. 仅与雷达的工作频率有关C. 与目标的形状、材料及入射角有关D. 不影响信号的返回19. 雷达系统中的“干扰”主要来源于()A. 自身发射B. 环境噪声C. 目标物体D. 以上均可20. 在目标检测中,雷达的“波长”对()有影响。