船舶值班与避碰新0资料讲解
- 格式:ppt
- 大小:1.21 MB
- 文档页数:307
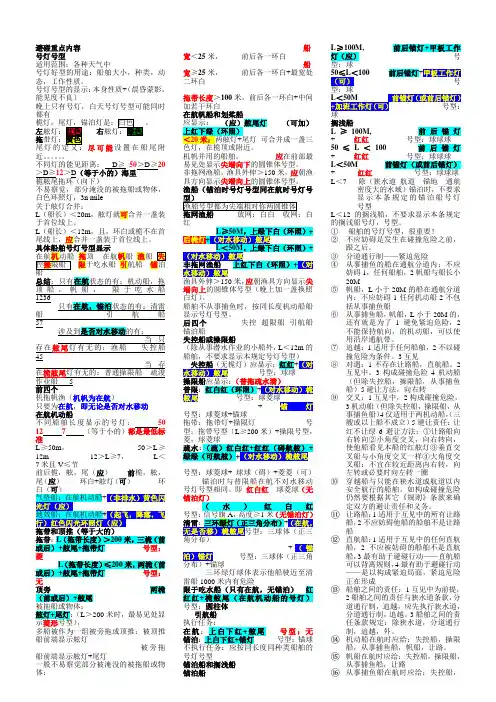
避碰重点内容号灯号型适用范围:各种天气中号灯好型的用途:船舶大小,种类,动态,工作性质。
号灯号型的显示:本身性质+(晨昏蒙影,能见度不良)晚上只有号灯,白天号灯号型可能同时都有。
左右拖尾灯的尽可能设置在船尾附近。
不同灯的能见距离:D≥50>D≥20>D≥12>D(等于小的)海里不易察觉,部分淹没的被拖船或物体,白色环照灯,3n mile关于舷灯合并:L(船长)<20m,舷灯就可合并一盏装于首位线上。
L(船长)<12m,且,环白或桅不在首尾线上,应合并一盏装于首位线上。
具体船舶号灯号型显示拖顶在航帆船渔船限于吃水船引航船顶船,帆船,限于吃水船1236船引航船57当只存在舷尾灯有无的:渔船失控船45当存在桅舷尾灯有无的:普通操限船疏浚作业船 5机拖帆渔(机帆为在航)只要为在航,即无论是否对水移动在航机动船不同船舶长度显示的号灯:50127(等于小的)都是最低标准L≥50m,50>L≥12m 12>L≥7,L<7米且V≤节前后桅,舷,尾(应)前桅,舷,尾(应)环白+舷灯(可)环白(可)气垫船:在航机动船+(非排水)黄色闪光灯(应)地效船:在航机动船+(起飞,降落,飞行)红色闪光环照灯(应)拖带和顶推(等于大的)拖带:L(拖带长度)>200米,三桅(前或后)+舷尾+拖带灯号型:菱L(拖带长度)≤200米,两桅(前或后)+舷尾+拖带灯号型:无顶旁两桅(前或后)+舷尾被拖船或物体:舷灯+尾灯:(L>200米时,最易见处显示菱形号型),多船被作为一组被旁拖或顶推:被顶推船前端显示舷灯被旁拖船前端显示舷灯+尾灯一般不易察觉部分被淹没的被拖船或物体:船宽<25米,前后各一环白船宽≥25米,前后各一环白+最宽处二环白拖带长度>100米,前后各一环白+中间加若干环白在航帆船和划桨船应显示:(应)舷尾灯(可加)上红下绿(环照)<20米:两舷灯+尾灯可合并成一盏三色灯,在桅顶或附近。
机帆并用的船舶,应在前部最易见处显示尖端向下的圆锥体号型。
《船舶值班与避碰教案》章节一:船舶值班概述1.1 教学目标了解船舶值班的基本概念和重要性掌握船舶值班的职责和任务了解船舶值班的相关法律法规1.2 教学内容船舶值班的定义和意义船舶值班的职责和任务船舶值班的相关法律法规1.3 教学方法讲授法:讲解船舶值班的基本概念和重要性,以及相关法律法规互动法:引导学生讨论船舶值班的职责和任务1.4 教学评估提问:评估学生对船舶值班的基本概念和职责的理解案例分析:评估学生对船舶值班的应用能力章节二:船舶值班人员的基本素质2.1 教学目标了解船舶值班人员的基本素质要求掌握船舶值班人员应具备的技能和知识培养船舶值班人员的职业素养2.2 教学内容船舶值班人员的基本素质要求船舶值班人员应具备的技能和知识船舶值班人员的职业素养培养2.3 教学方法讲授法:讲解船舶值班人员的基本素质要求和应具备的技能和知识实践法:通过模拟船舶值班情景,培养学生的职业素养2.4 教学评估提问:评估学生对船舶值班人员的基本素质要求的了解角色扮演:评估学生对船舶值班人员应具备的技能和知识的应用能力章节三:船舶避碰规则3.1 教学目标了解船舶避碰规则的基本概念和重要性掌握船舶避碰规则的具体内容学会运用船舶避碰规则进行船舶操纵3.2 教学内容船舶避碰规则的基本概念和重要性船舶避碰规则的具体内容船舶避碰规则的应用和操纵3.3 教学方法讲授法:讲解船舶避碰规则的基本概念和重要性,以及具体内容模拟操纵:通过模拟船舶操纵,让学生学会运用船舶避碰规则3.4 教学评估提问:评估学生对船舶避碰规则的基本概念和具体内容的理解模拟操纵:评估学生对船舶避碰规则的应用能力章节四:船舶避碰规则的适用范围4.1 教学目标了解船舶避碰规则适用范围的基本概念和重要性掌握船舶避碰规则适用范围的具体内容学会判断船舶避碰规则适用范围4.2 教学内容船舶避碰规则适用范围的基本概念和重要性船舶避碰规则适用范围的具体内容船舶避碰规则适用范围的判断方法4.3 教学方法讲授法:讲解船舶避碰规则适用范围的基本概念和重要性,以及具体内容案例分析:通过分析实际案例,让学生学会判断船舶避碰规则适用范围4.4 教学评估提问:评估学生对船舶避碰规则适用范围的基本概念和具体内容的理解案例分析:评估学生对船舶避碰规则适用范围的判断能力章节五:船舶避碰规则的遵守与执行5.1 教学目标了解船舶避碰规则遵守与执行的基本概念和重要性掌握船舶避碰规则遵守与执行的具体内容学会船舶避碰规则的遵守与执行方法5.2 教学内容船舶避碰规则遵守与执行的基本概念和重要性船舶避碰规则遵守与执行的具体内容船舶避碰规则遵守与执行的方法和技巧5.3 教学方法讲授法:讲解船舶避碰规则遵守与执行的基本概念和重要性,以及具体内容模拟操作:通过模拟船舶操纵,让学生学会船舶避碰规则的遵守与执行方法5.4 教学评估提问:评估学生对船舶避碰规则遵守与执行的基本概念和具体内容的理解模拟操作:评估学生对船舶避碰规则遵守与执行的应用能力《船舶值班与避碰教案》章节六:船舶值班中的通信与报告6.1 教学目标理解船舶值班中通信的重要性掌握船舶间的通信方式和程序学会正确填写和提交船舶报告6.2 教学内容船舶值班通信的基本要求船舶间通信方式和程序船舶报告的格式和提交要求6.3 教学方法讲授法:讲解通信的基本要求和通信方式案例分析:分析实际通信案例,演示正确通信程序实操演练:学生模拟填写和提交船舶报告6.4 教学评估提问:评估学生对通信基本要求和通信方式的掌握实操演练:评估学生填写和提交船舶报告的正确性章节七:船舶值班中的安全与应急处理7.1 教学目标理解船舶值班中的安全职责掌握船舶应急处理程序和措施学会船舶安全通信和应急信号的使用7.2 教学内容船舶值班中的安全职责船舶应急处理程序和措施船舶安全通信和应急信号的使用方法7.3 教学方法讲授法:讲解安全职责和应急处理程序情景模拟:模拟船舶应急情况,学生参与应急处理实操演练:学生练习安全通信和应急信号的使用7.4 教学评估提问:评估学生对安全职责和应急处理程序的理解情景模拟:评估学生在模拟应急情况中的表现章节八:船舶值班中的环境保护8.1 教学目标理解船舶值班中对环境保护的责任掌握船舶污染防治和资源回收的方法学会遵守国际海事组织规定的环保规则8.2 教学内容船舶值班中的环境保护责任船舶污染防治和资源回收的措施国际海事组织环保规则的遵守8.3 教学方法讲授法:讲解环境保护责任和污染防治措施案例分析:分析船舶环保案例,讨论环保措施的有效性讨论法:学生分组讨论如何遵守国际海事组织环保规则8.4 教学评估提问:评估学生对环境保护责任和污染防治措施的理解讨论法:评估学生对遵守国际海事组织环保规则的建议章节九:船舶值班中的领导与团队管理9.1 教学目标理解船舶值班中领导与团队管理的重要性掌握船舶团队建设和团队沟通的技巧学会激励团队成员和处理团队冲突9.2 教学内容船舶值班中的领导与团队管理船舶团队建设和沟通技巧激励团队成员和处理团队冲突的方法9.3 教学方法讲授法:讲解领导与团队管理的基本原则角色扮演:学生模拟船舶值班中的领导角色,练习团队管理技巧小组讨论:学生分组讨论如何激励团队成员和处理冲突9.4 教学评估提问:评估学生对领导与团队管理原则的理解角色扮演:评估学生在模拟中的领导能力和团队管理技巧章节十:船舶值班与避碰的综合案例分析10.1 教学目标综合运用所学知识分析船舶值班与避碰的案例提高学生的案例分析能力和决策能力培养学生的职业判断和应变能力10.2 教学内容综合案例分析的步骤和方法船舶值班与避碰案例的解析10.3 教学方法讲授法:讲解案例分析的步骤和方法案例研讨:学生分组讨论给定案例,提出分析和解决方案10.4 教学评估提问:评估学生对案例分析步骤和方法的理解案例研讨:评估学生的分析和解决方案的合理性重点和难点解析章节二:船舶值班人员的基本素质船舶值班人员应具备的技能和知识船舶值班人员的职业素养培养章节三:船舶避碰规则船舶避碰规则的具体内容船舶避碰规则的应用和操纵章节四:船舶避碰规则的适用范围船舶避碰规则适用范围的具体内容船舶避碰规则适用范围的判断方法章节六:船舶值班中的通信与报告船舶间通信方式和程序船舶报告的格式和提交要求章节七:船舶值班中的安全与应急处理船舶应急处理程序和措施船舶安全通信和应急信号的使用方法章节八:船舶值班中的环境保护船舶污染防治和资源回收的措施国际海事组织环保规则的遵守章节九:船舶值班中的领导与团队管理船舶团队建设和沟通技巧激励团队成员和处理团队冲突的方法章节十:船舶值班与避碰的综合案例分析综合案例分析的步骤和方法船舶值班与避碰案例的解析在上述环节中,重点关注的是船舶值班人员的基本素质要求,包括其应具备的技能和知识,以及职业素养的培养。



船舶值班与避碰船员适任考试复习内部资料大连海事大学航海学院目录1 国际海上避碰规则 (1)1.1规则适用范围和一般定义 (1)1.1.1 规则适用范围 (1)1.1.1.1 规则适用的水域和适用的船舶 (1)1.1.1.2 可制订特殊规则的水域和制定特殊规则的机关 (1)1.1.1.3 特殊规则与国际规则之间的关系 (1)1.1.1.4 额外信号及规则对额外信号的要求 (2)1.1.1.5 特殊构造或用途的船舶信号规定 (2)1.1.1.6 我国加入避碰规则公约时的保留 (2)1.1.2 一般定义 (3)1.1.2.1 船舶 (3)1.1.2.2 机动船定义 (4)1.1.2.3 帆船 (5)1.1.2.4 从事捕鱼的船舶 (5)1.1.2.5 水上飞机 (5)1.1.2.6 失去控制的船舶 (5)1.1.2.7 操纵能力受到限制的船舶 (6)1.1.2.8 限于吃水的船舶 (7)1.1.2.9 在航 (7)1.1.2.10 长度和宽度 (8)1.1.2.11 互见 (8)1.1.2.12 能见度不良 (8)1.1.2.13 地效船 (9)1.2号灯和号型,包括条款内容及识别方法,附录二的内容 (9)1.2.1 号灯与号型的作用 (9)1.2.2 号灯号型的显示时间 (9)1.2.3 号灯定义 (10)1.2.4 号灯的能见距离 (10)1.2.5 在航机动船应显示的号灯 (11)1.2.6 帆船应显示的号灯与号型 (11)1.2.7 从事捕鱼船应显示的号灯与号型 (12)1.2.8 限于吃水的船舶应显示的号灯与号型 (13)1.2.9 失去控制的船舶应显示的号灯与号型 (13)1.2.10 操纵能力受到限制的船舶应显示的号灯与号型 (14)1.2.11 从事拖带或顶推作业的船舶应显示的号灯和号型 (14)1.2.12 锚泊船应显示的号灯与号型 (15)1.2.13 搁浅船应显示的号灯与号型 (16)1.2.14 执行引航任务的船舶应显示的号灯与号型 (16)1.2.15 气垫船、地效船应显示的号灯 (16)1.2.16 在相互邻近处捕鱼的渔船的额外信号 (17)1.2.17 根据他船号灯的变化估测他船的航向及航向区间 (17)1.3声响和灯光信号,包括条款的适用条件,内容和附录四的内容 (18)1.3.1 长声和短声的定义 (18)1.3.2 声响器具的配备要求 (18)1.3.3 操纵与警告信号 (18)1.3.3.1 操纵声号 (19)1.3.3.2 操纵灯光信号 (19)1.3.3.3 追越声号 (19)1.3.3.4 警告信号 (19)1.3.3.5 一长声声号 (19)1.3.4 能见度不良时的行动声号 (19)1.3.4.1 能见度不良时的行动声号的适用范围 (20)1.3.4.2 在航机动船应鸣放的声号 (20)1.3.4.3 其他船舶应鸣放的声号 (20)1.3.4.4 被拖船应鸣放的声号 (21)1.3.4.5 锚泊船应鸣放的声号 (21)1.3.4.6 搁浅船应鸣放的声号 (21)1.3.4.7 执行引航任务的船舶可鸣放的识别声号 (21)1.3.5 招引注意的信号 (21)1.3.5.1 招引注意的信号使用时机 (21)1.3.5.2 对招引注意的信号的要求 (21)1.3.6 遇险信号 (21)1.3.6.1 遇险信号的使用方法 (22)1.3.6.2 遇险信号的种类 (22)1.4任何能见度情况下的行动规则,包括条款的适用条件、对象及内容 (22)1.4.1 了望 (22)1.4.1.1 了望条款的适用范围 (22)1.4.1.2 保持正规了望的手段 (22)1.4.1.3 了望人员的资格、数量及位置 (23)1.4.1.4 保持正规了望的目的 (23)1.4.2 安全航速 (23)1.4.2.1 安全航速的适用范围 (24)1.4.2.2 安全航速的含义 (24)1.4.2.3 影响安全航速的因素 (24)1.4.3 碰撞危险 (24)1.4.3.1 碰撞危险的适用范围 (25)1.4.3.2 判断碰撞危险的标准 (25)1.4.3.3 判断碰撞危险的方法 (25)1.4.3.4 用罗经方位判断碰撞危险时应注意的问题 (25)1.4.3.5 正确使用雷达应注意的事项 (25)1.4.4 避免碰撞的行动 (26)1.4.4.1 何种船舶应当及早采取避让行动 (26)1.4.4.2 避免碰撞的行动时间上的要求 (26)1.4.4.3 避免碰撞的行动幅度上的要求 (27)1.4.4.4 单用转向避让的条件 (27)1.4.4.5 紧迫局面和紧迫危险的含义 (27)1.4.4.6 减速、停车、倒车的时机 (27)1.4.4.7 不应妨碍的含义 (27)1.4.4.8 不应妨碍的船舶与不应被妨碍的船舶之间的相互关系 (28)1.4.5 狭水道 (28)1.4.5.1 狭水道条款的适用范围 (28)1.4.5.2 狭水道的航行原则 (28)1.4.5.3 不应妨碍的船舶的义务 (29)1.4.5.4 狭水道航行的注意事项 (29)1.4.6 分道通航制 (29)1.4.6.1 分道通航制的适用范围 (30)1.4.6.2 分道通航制条款与规则其他条款的关系 (30)1.4.6.3 使用分道通航制时应遵守的三项原则 (30)1.4.6.4 沿岸通航带的使用原则 (30)1.4.6.5 穿越通航分道的方法 (30)1.4.6.6 进入分隔带或穿越分隔线的时机 (30)1.4.6.7 不应妨碍的船舶的义务 (31)1.4.6.8 应特别谨慎航行的区域 (31)1.4.6.9 避免锚泊的区域 (31)1.4.6.10 免受分道通航条款约束的船舶 (31)1.4.6.11 特殊信号及其含义 (31)1.5互见中的行动规则 (31)1.5.1 帆船 (31)1.5.2 追越 (32)1.5.2.1 追越局面的构成条件 (32)1.5.2.2 追越条款与规则其他条款之间的关系 (32)1.5.2.3 追越局面的特点 (33)1.5.2.4 判断追越局面应注意的事项 (33)1.5.2.5 追越船让路时应注意的问题 (33)1.5.3 对遇局面 (33)1.5.3.1 对遇局面的构成条件 (33)1.5.3.2 对遇局面的特点 (34)1.5.3.3 判断对遇局面的条件 (34)1.5.3.4 对遇局面的避让方式 (34)1.5.3.5 危险对驶局面的概念及避让特点 (34)1.5.4 交叉相遇局面 (34)1.5.4.1 交叉相遇局面的构成条件 (34)1.5.4.2 交叉相遇局面的避让责任的划分原则 (35)1.5.4.3 交叉相遇局面下让路船应遵守的原则 (35)1.5.5 让路船的行动 (35)1.5.5.1 让路船的含义 (35)1.5.5.2 让路船应遵守的避让原则 (35)1.5.6 直航船的行动 (36)1.5.6.1 直航船的含义 (36)1.5.6.2 保向保速的含义及适用时机 (36)1.5.6.3 可独自采取避让行动的时机及行动的注意事项 (36)1.5.6.4 应采取最有助于避碰行动的时机及行动的注意事项 (37)1.5.6.5 让路船的责任 (37)1.5.7 船舶之间的责任 (37)1.5.7.1 船舶之间的责任条款与规则其他条款之间的关系 (37)1.5.7.2 船舶之间的避让责任关系和划分船舶之间避让责任的原则 (38)1.5.7.3 机动船与其他船舶之间的避让关系 (38)1.5.7.4 帆船与其他船舶之间的避让关系 (38)1.5.7.5 从事捕鱼船与其他船舶之间的避让关系 (38)1.5.7.6 水上飞机的避让责任 (38)1.5.7.7 限于吃水的船舶的特点及航行注意事项 (38)1.5.7.8 地效船的避让责任 (38)1.6能见度不良时的行动规则 (39)1.6.1 能见度不良时的行动规则的适用范围 (39)1.6.2 能见度不良时的安全航速 (39)1.6.3 船舶在能见度不良水域航行的戒备 (39)1.6.4 能见度不良时转向避让原则 (40)1.6.5 能见度不良时减速、停车和停船的时机 (41)1.7责任条款 (41)1.7.1 责任条款适用的对象 (41)1.7.2 遵守本规则各条的疏忽的含义 (41)1.7.3 海员通常做法所要求的任何戒备上的疏忽的含义 (41)1.7.4 特殊情况下所应保持戒备上的疏忽的含义 (42)1.7.5 背离规则的条件、可能需要背离规则的情况、背离规则的目的 (42)1.7.6 背离规则时应注意的问题 (42)1.8各种特殊情况下的避碰 (42)1.8.1 分道通航制水域、港口水域的船舶避让 (42)1.8.2 渔区航行时对渔船的避让 (43)1.8.3 狭水道、岛礁区的避让 (43)1.8.4 多船同时构成碰撞危险时的避让 (43)2 航行值班原则和驾驶台工作程序 (43)2.1航行值班中基本原则的内容、应用和意图 (44)2.1.1 适于值班的条件 (44)2.1.1.1 保持安全值班的目的 (44)2.1.1.2 值班人员的值班时间的强制性标准 (45)2.1.1.3 STCW规则为防止疲劳作出的指导性意见 (46)2.1.1.4 疲劳产生的原因及影响因素 (46)2.1.1.5 为保证安全值班应采取的措施 (46)2.1.2 值班安排和应遵循的原则,包括发证、航行计划、海上值班等 (47)2.1.2.1 值班安排的总体要求 (47)2.1.2.2 值班安排和应遵循的原则的基本规定 (47)2.2驾驶台协调工作程序 (49)2.2.1 驾驶台值班驾驶员承担的责任及要求 (49)2.2.2 驾驶台了望的要求 (50)2.2.2.1 了望的目的 (50)2.2.2.2 值班驾驶员作为唯一了望人员的条件 (51)2.2.2.3 为保持正规了望值班安排应考虑的因素 (51)2.2.3 驾驶台交接班的有关要求 (52)2.2.3.1 交班驾驶员应注意的事项 (52)2.2.3.2 接班驾驶员应注意的事项 (52)2.2.4 引航员在船时驾驶员应承担的责任及要求 (53)2.2.5 对船舶正常航行、操纵和避让行动的有关要求 (53)2.2.5.1 正常航行值班的要求(与前面有一定重复) (53)2.2.5.2 操纵和避让行动的要求 (55)2.2.6 船舶在锚泊时驾驶台人员应承担的工作 (55)3 使用船舶定线制的基本原则、方法及注意事项 (56)3.1使用船舶定线制的具体要求及方法 (56)3.2使用船舶定线制的注意事项 (57)4 船舶操纵性能 (58)4.1船速与冲程 (58)4.1.1 船速分类及测速 (58)4.1.1.1 船速分类 (58)4.1.1.2 测速的条件 (58)4.1.2 冲程的概念 (58)4.1.2.1 停车冲程的含义及过程 (58)4.1.2.2 倒车冲程的含义及过程 (58)4.1.2.3 船舶倒车冲程的经验数据 (59)4.1.2.4 影响冲程的因素 (59)4.2螺旋桨的偏转效应 (59)4.2.1 沉深横向力、伴流横向力、排出流横向力及推力中心偏位横向力 (59)4.2.2 右旋式单车船静止中、前进中、后退中倒车时产生的现象及原因 (60)4.3旋回性及舵效 (60)4.3.1 旋回圈,旋回要素的定义及影响旋回圈的因素 (60)4.3.1.1 旋回圈的概念 (60)4.3.1.2 旋回要素的定义 (61)4.3.1.3 影响旋回圈的要素 (61)4.3.2 舵效的概念及影响舵效的因素 (62)4.3.2.1 舵效的概念 (62)4.3.2.2 影响舵效的因素 (62)4.4航向稳定性 (63)4.4.1 航向稳定性的概念 (63)4.4.2 判断航向稳定性的方法 (64)4.4.2.1 经验判断 (64)4.4.2.2 实船试验判断 (64)5 外界因素对操纵的影响 (64)5.1风、流对船舶操纵的影响 (64)5.1.1 风致偏转和漂移的规律 (64)5.1.1.1 风动压力和水动压力的三要素 (64)5.1.1.2 静止中、前进中和后退中的船舶风致偏转的规律 (65)5.1.1.3 静止中船舶风致漂移速度 (66)5.1.1.4 影响船舶风中保向的因素 (66)5.1.2 流对旋回性、冲程及舵效的影响 (66)5.1.2.1 流对旋回漂移距离的影响 (66)5.1.2.2 流对冲程及舵效的影响 (67)5.2浅水效应、岸壁效应对船舶操纵的影响 (67)5.2.1 浅水效应及其影响因素 (67)5.2.2 岸壁效应及其影响因素 (68)5.2.3 确定富余水深应考虑的因素及经验数据 (68)5.3船间效应 (68)5.3.1 船间效应产生的现象 (68)5.3.2 影响船间效应的因素 (69)5.3.3 追越中预防船间效应的措施 (69)5.3.4 在航船驶过系泊船时产生的现象及减轻措施 (69)6 系、离泊操纵 (69)6.1锚泊作业 (69)6.1.1 锚泊作业的方式、种类 (69)6.1.1.1 单锚泊作业的方式 (69)6.1.1.2 双锚泊作业的方式:一字锚、八字锚和平行锚 (70)6.1.2 锚泊作业程序 (70)6.1.2.1 水深小于25米的单锚泊作业程序 (70)6.1.2.2 深水锚泊作业程序 (71)6.1.3 防止走锚的措施 (71)6.1.3.1 判断走锚的方法 (71)6.1.3.2 走锚后的措施 (71)6.2靠、离泊作业 (71)6.2.1 靠、离泊作业的程序 (71)6.2.1.1 靠泊作业的操作要领 (71)6.2.1.2 离泊作业的操作要领 (72)6.2.2 系、解缆方法及注意事项 (72)6.2.2.1 系泊用缆时缆绳的名称及作用 (72)6.2.2.2 系解缆的程序及注意事项 (73)7 应急反应 (73)7.1船舶碰撞前后、搁浅后应采取的初步措施,损害的初步评估和控制 (73)7.1.1 船舶碰撞前的应急操船 (73)7.1.2 船舶碰撞后应采取的初步措施 (73)7.1.2.1 碰撞后的应急操船 (73)7.1.2.2 减少进水量的措施 (73)7.1.3 搁浅后应采取的初步措施及控制方法 (73)7.1.3.1 搁浅的危害 (73)7.1.3.2 盲目用车的危害 (73)7.1.3.3 脱浅的方法 (74)7.1.4 弃船的注意事项 (74)7.2救助落水人员、协助遇险船舶、港内应急反应应遵循的程序 (74)7.2.1 人员落水的应急措施 (74)7.2.2 协助遇险船舶、港内应急反应应遵循的程序 (74)7.3在紧急情况下的保护措施和旅客安全措施的知识 (75)7.4商船搜寻与救助 (75)7.4.1 搜救组织 (75)7.4.2 搜寻基点和最可能区域的确定 (75)7.4.3 搜寻方式 (76)7.4.3.1 单船搜寻:扩展方形搜寻、扇形搜寻 (76)7.4.3.2 多船搜寻:平行航线搜寻 (76)7.4.3.3 海空协同搜寻 (76)1国际海上避碰规则1.1规则适用范围和一般定义1.1.1规则适用范围1.1.1.1规则适用的水域和适用的船舶第一条适用范围1. 本规则条款适用于公海和连接于公海而可供海船航行的一切水域中的一切船舶。
一、定义1.船舶:用作或者能够被用作水上运输的工具,即能够装载人或货物的一切船筏2.机动船:凡是使用机器推进的任何船舶3.帆船:指任何驶帆的船舶,如果装有推进器但不在使用。
4.从事捕鱼的船舶:指使用网具,绳钓,拖网或其他使其操纵能力受到限制的渔具捕鱼的任何船舶,但不包括使用绳钓或其他并不使其操纵性能呢个受到限制的渔具捕鱼的船舶。
必须满足两个条件:①正在从事捕鱼作业(从放网开始到收完网为止)②作业时所使用的渔具使其操纵能力受到限制5.失去控制的船舶指由于某种异常情况,不能按本规则条款的要求进行操纵因而不能给他船让路的船舶。
6.操纵能力受到限制的船舶┈┈指由于工作性质,使其按本规则条款的要求进行操纵的能力受到限制,因而不能给他船人让路的船舶。
7.限于吃水的船舶指由于吃水与可航水域的水深和宽度的关系,致使其驶离航向的能力严重地受到限制的机动船8.在航指船舶不在锚泊、系岸或搁浅9.长度和宽度指船舶的总长度和最大宽度。
载于船舶登记证书中10.互见指只有一船自他船以视觉看到时,才应认为两船是在互见中11.能见度不良指任何由于雾、霾、雪、暴风雨、沙暴或任何其它类似的原因而使能见度受到限制的情况。
12.地效船系指多式船艇,其主要操作方式是利用表面效应贴近水面飞行。
13. 交叉相遇局面是指除对遇、追越规定的参照坐标范围外两艘机动船航向交叉,且又同时向交叉点驶近,存在碰撞危险的一种局面。
14. 驶过让清:指采取的避让行动能使两船无阻碍地保持在安全距离上驶过。
15.安全航速:指能采取适当而有效的避碰行动,并能在适合当时环境和情况的距离以内把船停住的速度。
号笛:指能够发出规定笛声并符合附录三所载规格的任何声响信号器具。
碰撞危险(罗经方位判断法):通常指在较近的距离驶近时,罗经方位没有明显的变化;或是在驶近一艘很大的船舶或拖带船组时,以及近距离驶近他船时,罗经方位也可能有明显变化的情况。
良好船艺:指航海人员在长期航海实践中所积累的经验而运用在最适合当时环境和情况下所采取的避让行动,并已成为海员的惯例。
船舶操纵与避碰——船舶避碰与值班教材导言船舶操纵是一门重要的航海学科,是指船舶在航行过程中如何进行操纵和避碰的技术和原则。
在航海活动中,船舶避碰是指在交会、交叉或逢遇情况下,船舶如何避免碰撞的行为,而值班则是船舶相关人员需要进行的一项重要工作。
本文将从船舶避碰与值班的角度出发,对船舶操纵进行深入探讨,并结合船舶避碰与值班教材的内容,提供有价值的文章。
一、船舶避碰的基本原则在航海活动中,船舶避碰是至关重要的,这涉及到船舶安全和生命财产的保障。
根据国际海上避碰规则,船舶避碰的基本原则有五大类:相遇、交叉、会车、遇险和特殊情况。
在这些情况下,船舶需要遵循一定的原则和规定来进行避碰,保证航行的安全。
而在船舶避碰与值班教材中也详细介绍了这些原则及其实际操作,对于学习船舶操纵的人员来说,是非常重要的知识点。
二、船舶值班的重要性船舶值班是航海过程中必不可少的工作之一。
在船舶操纵中,无论是船长、船员还是其他相关人员,都需要在不同的时间段内进行值班工作,以保证船舶在航行中的安全和正常运行。
在值班过程中,需要对船舶的状态、航行情况以及周围环境进行全面监控和记录,及时发现并处理可能出现的问题和危险情况。
船舶值班教材中也详细介绍了船舶值班的要求和内容,对于培养船舶操纵人员的素质和技能具有重要意义。
三、个人观点和理解在我看来,船舶避碰与值班是航海学科中非常重要的一部分。
船舶避碰原则的学习和掌握,可以帮助航海人员在实际航行中做出正确的决策,避免碰撞事故的发生。
而船舶值班的工作则是对船舶操纵人员的素质和能力有着严格要求,只有通过持续的学习和训练,才能在航行中胜任各种复杂情况的处理。
总结船舶操纵与避碰——船舶避碰与值班教材内容丰富,涵盖了船舶避碰和值班的方方面面,可以帮助学习者全面、深入地理解和掌握相关知识和技能。
在未来的航海活动中,这些知识和技能将对航行的安全和成功起到关键作用。
至此,本文对船舶操纵与避碰——船舶避碰与值班的相关内容进行了全面评估和深度探讨,希望能够对您的学习和工作有所帮助。