动目标显示与动目标检测
- 格式:doc
- 大小:3.01 MB
- 文档页数:15

合成孔径雷达的动目标成像与检测摘要动目标的成像与检测是合成孔径雷达(SAR)领域中的研究热点之一,不论是在军事上还是在民用上都有很重要的意义。
目前,世界上很多国家都在积极发展动目标的检测和成像技术,研制先进的动目标检测和成像雷达系统,努力寻找各种高效、实用的动目标检测和成像方法。
本文主要研究了单通道SAR的动目标检测和成像技术,旨在提高动目标的检测概率,获取动目标的运动参数并对其精确成像。
主要工作如下:1、分析了SAR的运动目标回波模型,探讨了目标运动引起的多普勒质心变化,以及这些变化对常规SAR成像结果的影响。
2、对SAR的动目标检测和成像原理做了介绍,分析了步进频信号和线性调频信号的一维距离像,对步进频信号的一维距离像进行了重点分析。
3、对信号进行仿真,对不同参数的一维距离像进行比较,分析仿真结果。
关键词:合成孔径雷达,动目标检测和成像,一维距离像Moving Targets Detection and Imaging of SARAbstractMoving Targets Detection and Imaging (MTDI) is hot in Synthetic Aperture Radar (SAR) research and plays an important role in both martial field and civilian field. Now many countries in the world are making great efforts to develop advanced MTDI systems and explore high efficient MTDI algorithms. The key techniques of MTDI are studied in this dissertation for getting high detection probability, accurate parameters and good images of moving targets.The major work of this dissertation is as follows:1. After analyzing the model of moving targets’ echoes, the change s of Doppler history are discussed in detail, which are due to targets’ moving. It is analyzed that the influence of the changes on the conventional SAR imaging.2. In this paper, the principle of MTDI are introduced. At the same time, we analyze the High Range Resolution Profile of the step frequency signal and the linear frequency modulation signal. The High Range Resolution Profile of the step frequency signal is more important in our paper.3.We will simulation ,then change the parameters of the signal and analyse the difference between them.Key words:Synthetic Aperture Radar, Moving Targets Detection and Imaging, High Range Resolution Profile.目录1 绪论 (1)1.1 合成孔径雷达的动目标检测和成像的意义 (1)1.2 合成孔径雷达研究及动态 (2)1.3本文的主要内容 (5)2 SAR动目标检测和成像原理 (6)2.1 SAR理论模型和成像原理 (6)2.2 运动目标的回波信号分析 (10)2.3目标运动引起的多普勒质心变化及其对常规SAR成像的影响 (12)2.3.1 目标运动引起的多普勒质心变化 (13)2.3.2动目标多普勒质心变化对常规SAR成像的影响 (14)2.4本章小结 (14)3 合成孔径雷达动目标的一维距离像 (15)3.1 频率步进脉冲信号距离成像原理分析 (15)3.2 频率步进雷达发射信号波形及设计准则 (18)3.2.1 频率步进波形 (18)3.2.2 频率步进信号相关参量设计 (19)3.3 一个步进频信号的一维距离像 (24)3.4仿真结果 (27)3.4.1 第一组参数实验数据及结果 (27)3.4.2 第二组参数实验数据及结果 (29)3.4.3 第三组参数实验数据及结果 (31)3.4.4 第四组参数实验数据及结果 (32)3.4.5 第五组参数实验数据及结果 (34)3.4.6 对实验结果的分析 (35)3.4.7 参考程序 (36)3.5 总结 (38)4 结束语 (39)参考文献 (40)致谢 (42)1 绪论1.1 合成孔径雷达的动目标检测和成像的意义检测运动目标是现代雷达要完成的功能之一。

第16章机载动目标显示(AMTI)雷达FRED M. STAUDAHER16.1 采用AMTI技术的系统机载搜索雷达最初是为远程侦察机探测舰艇研制的。
第二次世界大战后期,美海军研制了几种机载预警(AEW)雷达,用来探测从舰艇雷达天线威力区之下飞近特遣舰队的低空飞机。
在增大对空和对海面目标的最大检测距离方面,机载雷达的优点是显而易见的,只要了解下述情况就很清楚了,高度为100ft的天线桅杆,其雷达视线距离只有12n mile,而与其相比,飞机高度为10 000ft时,雷达视线距离则为123n mile。
神风突击队袭击造成多艘哨舰的损失引起了机载自主探测与控制站的设想,后来这种系统发展成为一种用于洲际防空的边界巡逻机。
E—2C航空母舰舰载飞机(如图16.1所示)使用机载预警雷达作为其机载战术数据系统中的主要传感器。
这种雷达的视界很宽,用于检测海杂波和地杂波背景中的小飞机目标。
由于其首要的任务是检测低空飞行的飞机,因此这种雷达就不能靠抬高天线波束的仰角来消除杂波。
AMTI雷达系统就是在这种情况下发展起来的[1]~[3],与前一章中探讨的地面雷达的MTI 系统相似[1][4]~[6]。
图16.1 带有旋转天线罩的E—2C空中预警机在截击机火炮控制系统中,AMTI雷达系统还可用来捕捉和跟踪目标。
在这种场合中,雷达仅需抑制指定目标附近的杂波。
因此,在目标所处的距离和角度扇形区内可将雷达优化到最佳状态。
MTI系统也可以装在侦察机或战术歼击-轰炸机上用来检测地面运动的车辆。
由于目标速度低,因而采用较高的雷达频率以获得大的多普勒频移。
因为背景杂波通常很强,故这些雷达能够有效地采用非相参MTI技术。
高空、高机动、高速度的环境条件及尺寸、重量、功耗的限制给AMTI雷达设计者带来了一系列的特殊问题。
本章将专门探讨机载条件下如何处理这些特殊问题。
第16章机载动目标显示(AMTI)雷达·637·16.2 覆盖范围的考虑搜索雷达一般要求有360︒方位角覆盖。

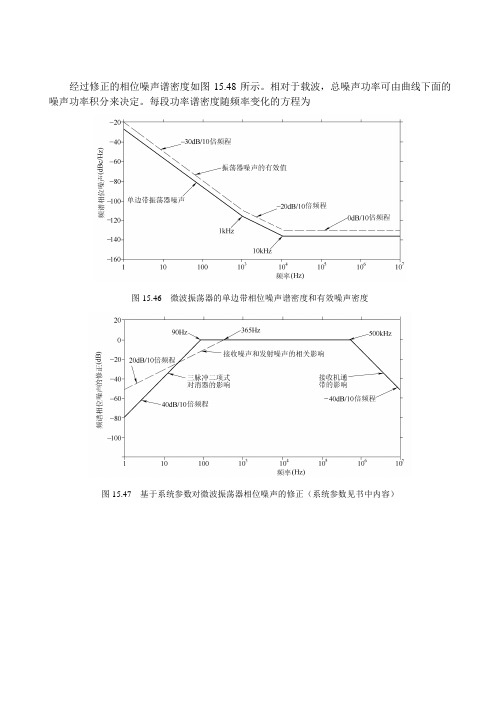
经过修正的相位噪声谱密度如图15.48所示。
相对于载波,总噪声功率可由曲线下面的噪声功率积分来决定。
每段功率谱密度随频率变化的方程为图15.46 微波振荡器的单边带相位噪声谱密度和有效噪声密度图15.47 基于系统参数对微波振荡器相位噪声的修正(系统参数见书中内容)雷 达 手 册·576·图15.48 组合修正和修正后的相位噪声谱密度⎥⎥⎦⎤⎢⎢⎣⎡⨯=)lg(101110)(f f f p f p 斜率 (15.28)式中,P f 1为在f 1的功率谱密度,单位是W/Hz (为方便起见,载波功率假设为1W );“斜率”为该段的斜率,单位是dB/10倍频程;f 1为P f 1处的频率。
对于具有恒定斜率的的每段频谱而言,该方程可以用Vigneri 方法[31]或用带积分功能的计算器(如Hewlett Packard HP-15C )求积分运算。
表15.3给出这个例子的积分结果。
注意:假设条件是载波功率为1W ,如-149.4dBc/Hz 变成1.148×10-15W/Hz ,则在所有段计算积分功率时,先对它们求和,然后转化为dBc 。
最终结果-66.37dBc 就是由振荡器噪声导致的对改善因子I 的限制。
对I SCR (dB )的极限是I (dB )加上目标积累增益(dB )。
表15.3 用图15.47进行校正的如图15.46所示的相位噪声谱密度积分值发射脉冲的时间抖动会使MTI 系统的性能变坏。
时间抖动会使脉冲的前沿及后沿对消失败,而每一个未被对消的部分的幅度为∆t /τ。
这里,∆t 为抖动时间;τ为发射脉冲宽度。
总的剩余功率为2(∆t /τ)2,因此,由于时间抖动对改善因子所产生的限制为)]2/(lg[20t I ∆=τ(dB)。
第15章 动目标显示(MTI )雷达·577·对改善因子的这种限制是根据非编码发射脉冲并假定接收机带宽与发射脉冲持续时间相匹配得出的。

动目标信息包括雷达位置指示动目标显示雷达检测强杂波中的动目标信号的能力虽不如脉冲多普勒雷达,但简单经济,因此获得广泛应用,如用作监视低空的防空雷达、战场监视雷达、机载雷达和用于空中交通管制等。
由于天线波瓣调制、设备不稳定和杂波源扰动等因素,杂波呈现宽齿梳状频谱(齿宽即杂波频谱宽度),经杂波滤波器滤波后仍有杂波剩余。
动目标显示性能越好,杂波剩余越小。
常用的性能指标是动目标显示改善因数,是指杂波滤波器的输出信号杂波比与输入信号杂波比的平均比值。
类似的指标还有杂波对消比、杂波中目标可见度等。
但因均未考虑雷达信号的距离分辨力和天线空间分辨力,不能用来比较两种雷达的性能。
为了提高改善因数,在信号产生、处理、传输各个环节,对信号幅度、频率、相位和延迟稳定性都有严格的要求,如达到60分贝的改善因数,周期间发射信号的均方根相位噪声应小于0.06°。
接收机限幅会展宽杂波频谱,使处理效果受到限制,其损失随对消器级联数的增加而增加,因此要求改善因数高的接收机保持线性特性。
在雷达显示器或其他终端设备上仅显示所需要的动目标的脉冲雷达。
在很多情况下,目标都是运动的,如飞机、导弹等,而在雷达回波中既有所需要的目标回波,也有不需要的物体回波,如地物、云雨、干扰金属箔条的回波(称为杂波)。
大部分杂波源近似于静止,但分布面积大。
因此,杂波可能比目标回波强得多,干扰对目标的观测。
动目标显示雷达具有区别动目标回波与杂波的能力,并能通过杂波滤波器对杂波进行抑制。
区别动目标回波与杂波,有两种基本方法。
一种是根据天线相邻扫描周期间回波的位置变化来区别,但这种方法因难以在强杂波中检测目标信号而很少应用。
另一种方法是根据相邻发射-接收周期的回波的相位变化来区别,即利用目标和杂波源对雷达的不同径向速度所引起的两者回波的多普勒频移的差别。
采取滤波措施滤掉杂波,能在比目标回波强得多的杂波背景中检测动目标回波。
一般的动目标显示雷达都属此类。

雷达信号处理仿真【摘要】文章针对现代雷达信号处理的主要方式,建立了雷达信号处理仿真的数学模型,其中包括正交双通道处理、动目标检显示、动目标检测以及恒虚警处理等。
根据数学模型,用Matlab软件对雷达信号处理系统进行了仿真,得到了雷达系统中各个处理点上的具体信号形式,并用图形用户界面(GUI)来动态显示雷达信号处理过程,使仿真结果表现得更直观。
【关键词】雷达信号处理;正交双通道处理;动目标显示;动目标检测;恒虚警检测1引言的目的是消除所有不需要的信号及干扰,提取或加强由目雷达信号处理[12]标所产生的回波信号,在处理过程中要用到一些信号处理的关键技术,如数字正交双通道处理、脉冲压缩技术、固定目标对消技术、动目标显示技术、动目标检测技术[3]、恒虚警处理[4]和脉冲积累等。
由于现代雷达信号处理过程日益变得复杂,难以用简单直观的分析法进行处理,往往需要借助计算机来完成对系统的各项功能和性能的仿真。
利用计算机来进行雷达系统的仿真[5]具有方便、灵活以及经济的特点。
而MATLAB提供了强大的仿真平台,可以为大多数雷达系统的仿真提供方便快捷的运算。
2雷达信号处理基础2.1数字正交双通道处理在全相参雷达中,可以用正交双通道处理来获得中频信号的基带信号(零中频信号)()x t,有时也称()x t为中频信号的复包络。
正交双通道处理的框图如图s t为中频回波信号。
1所示,其中()r图1正交双通道处理框图其中中频回波信号为:0()()cos[2()]r d s t a t f f t π=+(1)上式中,0f 为中频频率,d f 表示多普勒频率,其值可能是正值或负值,也可能为零。
0000()()cos(2)()cos[2()]cos(2)11()cos(2)()cos[2(2)]22I r d d d s t s t f t a t f f t f t a t f t a t f f t πππππ==+ =++ (2)0000()()cos(2)()cos[2()]sin(2)211()sin(2)()sin[2(2)]22Q r d d d s t s t f t a t f f t f t a t f t a t f f t ππππππ=+=-+ =-+(3)图1中的低通滤波器将滤去02f 的分量,这样就可以得到正交双通道信号。
一种新的MIMO雷达动目标检测方法摘要:针对MIMO雷达的动目标显示(MTI)特性,通过与传统单延时对消方法对比,采用双延时对消和变T技术处理盲速的方法进行动目标检测。
最后对比仿真实验结果证明,在动目标检测中使用双延迟线对消和变T技术处理盲速的方法,能够更好地提取杂波中的运动目标。
关键词:MIMO雷达动目标显示(MTI) 延时对消多输入多输出(MIMO)雷达是近几年发展起来的一种新体制雷达。
通常将MIMO雷达分为两大类:一类是共置MIMO雷达,这类雷达系统的发射阵元间距很小,发射机从同一个角度照射目标,通过波形分集提高雷达系统性能;另一类是统计MIMO雷达,这类雷达发射阵元间距分散开,利用多个不同方位的雷达发射信号,较好地克服了目标RCS的角闪烁所带来的性能损失,获得较大的空间分集增益,能够根据多普勒频移解决慢目标的检测问题,而且能够克服带宽的限制,实现更高精度的目标定位[1]。
由于雷达天线接收到的信号除了感兴趣的目标回波以外,还包括接收机的噪声、以及各种杂波。
因此,当杂波和运动目标回波同时被接收时,会使目标的观测显得困难。
一方面,如果目标回波信号混叠在强干扰杂波中,不可能完成自动门限信号检测。
即使目标回波信号与干扰杂波处在不同的距离、方位和仰角上,杂波背景也会影响杂波邻近目标回波信号的分辨;另一方面,如果雷达终端采用自动检测和数据处理系统,则由于大量杂波的存在,将引起终端过载或不必要地增加系统的容量和复杂性。
因此,无论从抗干扰或改善雷达工作质量的观点来看,选择运动目标回波而抑制杂波背景很重要。
可以从速度的差别上来区分运动目标和杂波。
由于运动速度不同而引起回波信号频率产生的多普勒频移不相等,这就可以从频率上区分不同速度目标的回波[2]。
因此,本文将讨论后一种类型的MIMO雷达中MTI问题。
1 目标多普勒频移及杂波功率谱2 MIMO雷达MTI基本原理MTI(运动目标显示)的本质含义:基于回波多谱勒信息的提取而区分为运动目标和固定目标。
摘要摘要动目标检测技术作为雷达数字信号处理中的关键环节之一,使得雷达具有在频域上分辩不同目标的能力。
随着雷达技术和微电子技术的不断发展,雷达信号处理器向着数字化、集成化、通用化方向发展。
专用集成电路(ASIC)相比FPGA和DSP来说有着更快的速度和更小的面积、功耗,对于导弹、无人机等载体有着重要的意义。
本论文的研究工作源自国家部委雷达信号处理器项目,主要完成了雷达信号处理系统中动目标检测处理器的ASIC设计与实现,动目标检测处理器位于脉冲压缩之后,包含多普勒滤波通道和零频抑制滤波通道,其中脉冲积累个数32~128可配置。
多普勒滤波通道用于对回波进行脉冲多普勒处理,在频域上区分不同目标,零频抑制滤波通道用于检测低速目标。
首先本文对动目标检测的原理做了研究,研究了快慢时间维采样、动目标显示、多普勒滤波器组和零频抑制滤波器的相关算法。
采用有限冲击响应(FIR)横向滤波器实现多普勒滤波器组,其加权系数可随不同的应用场景而设计,可以在不同频段设计相应频率的滤波器来抑制各种不同的杂波,但是直接使用FIR滤波器实现多普勒滤波器组硬件资源消耗大,针对这一问题,采用了10组滤波单元复用的方式实现可配置的滤波器组,减少了硬件资源的消耗,可以对脉冲压缩后脉冲占空比1/16以下的数据进行脉冲多普勒处理。
对于零频抑制滤波器,直接在时域使用共轭离散傅里叶变换(DFT)滤波器相减来实现,无法判断低速目标的运动方向,针对这一问题,本文首先对慢时间维采样数据进行FFT处理变换到频域,再在频域上进行滤波,可以得到低速目标运动速度的正负。
对于慢时间维采样数据的FFT,采用基2的方式完成了基于SDF结构的存储迭代FFT处理器设计,能够实现8~1024点FFT处理。
最终完成了动目标检测整体电路的设计。
随后采用Matlab建模搭建验证平台并产生相应的测试激励,将Modelsim仿真与Matlab对比,验证了不同配置情况下的动目标检测电路,并对仿真结果做了误差分析,相对误差在10-3数量级。
6.5 动目标显示与动目标检测引言1.目标回波频谱6.5.1 目标回波和杂波的频谱 2.杂波频谱原理递归传统非递归6.5.2 MTI滤波器零点分配算法滤波器设计优化预测误差算法结语原理MTI+FFT6.5.3 MTD滤波器滤波器设计点最佳等间隔最佳结语6.5.4 改善因子分析MTIMTD6.5 动目标显示与动目标检测雷达探测的运动目标如飞机,导弹,舰艇,车辆等周围存在各种背景,包括不动的地物和运动着的云雨,海浪或金属丝干扰等。
动目标显示(Moving Target Indicator :MTI )与动目标检测(Moving Target Detection: MTD )就是使用各种滤波器,滤去这些背景产生的杂波而取出运动目标的回波。
此外也可以通过把雷达安装在山上、增加雷达天线的倾角、安装防杂波网来阻止杂波进入天线;或通过调整雷达天线的波束形式、采用极化技术、降低雷达的分辨单元、在时域采用CFAR 检测、自适应门限、杂波图来抑制杂波。
在频域上应用MTI 与MTD 技术可以提高信杂比,改善杂波背景下检测运动目标的能力。
本节首先分析目标回波和杂波的频谱特性;然后分别讨论MTI 与MTD 原理及滤波器设计方法;最后分析MTI 与MTD 对改善因子的提高。
6.5.1 目标回波和杂波的频谱运动目标回波和杂波在频谱结构上有所差别,运动目标检测就是利用这种差别,从频率上将它们区分,以达到抑制杂波而显示目标回波的目的。
为此,应首先弄清楚目标和杂波的回波的特性。
(1) 目标回波的频谱雷达发射相参脉冲串,其脉冲宽度为e T ,脉冲重复频率为r f 。
当天线不扫描而对准目标时,所得脉冲为无限脉冲串。
调制信号)(1t u 及其频谱)(1f U 分别为∑∞-∞=⎪⎪⎭⎫⎝⎛-=n e rTnT t rect A t u )(1 (6.5.1)∑∞-∞=-=n r e e r e f n f T f T f T AT f U )()sin()(1δππ (6.5.2)A 为信号振幅。
而高频载波)(2t u 及其频谱)(2f U 为t t u 02cos )(ω= (6.5.3))]()([21)(002f f f f f U ++-=δδ (6.5.4)发射的相参脉冲串)()()(21t u t u t u ∙=,故其频谱)(f U 为)()()(21f U f U f U ⊗= (6.5.5)A(d)0000f τ-0f τ+fτ-+0f τ-f τ-+0d τ0d τ(b)(a)固定回波频谱动目标回波频谱图6.5.1 发射接收信号时域与频域特性雷达发射信号通常是窄带信号(如图6.5.1(a)),因而运动目标回波频谱的特征是将发射信号的频谱位置在频率轴上平移一个多普勒频率λrd v f 2=(如图6.5.1(c)),d f 的符号由目标运动的方向决定,靠近为正,远离为负。
固定回波的频谱与发射信号一致,只是幅度有衰减(如图6.5.1(b))。
多普勒频率d f 可以直观地解释为:振荡源发射的电磁波以恒速c 传播,当接收者相对振荡源不动,则它的接收频率等于发射频率。
当接收者与振荡源之间有相对接近的运动时,则它接收电磁波的频率大于振荡源发射频率,当两者背向运动时,结果相反。
运动目标与雷达有相对运动,所以存在多普勒频率d f 。
定义固定回波的波程为02R ,0R 为雷达到目标的距离,则回波到达雷达的时间为02R c;由于运动目标与雷达有相对运动,其波程为02()R R -∆,时间为02()R R c-∆。
雷达工作时,天线以各种方式进行扫描,这时收到的回波脉冲为有限数,且其振幅受天线方向图调制。
设天线方向图可用高斯函数来表示,则收到的回波脉冲串的包络函数可写为()2222ex p 2)(t t m σπσπ-= (6.5.6)σ是和天线波瓣宽度及扫描速度有关的参数。
σ减小,表示观察时间增加。
天线扫描时收到的回波信号,可以用)(t m 和无限脉冲串)(t u r 的乘积表示。
)(t u r 为天线不扫描时的回波脉冲串,即)()()(t u t m t u r m = (6.5.7)其包络函数)(t m 的频谱为222)(σfe f M -=(6.5.8)图6.5.2 天线扫描条件下回波频谱天线扫描时回波信号的频谱)f U m (为)()()(f U f M f U r m ⊗= (6.5.9)即无限回波脉冲串频谱)(f U r 的每一根谱线均按)(f M 的形状展宽(如图6.5.1(d))。
谱线展宽的程度反比于天线波束照射目标的时间θT 。
已求出当天线方向图为高斯形时谱线展宽的均方值为nf T rs 265.0265.0==θσ (6.5.10)式中:r f 为雷达重复频率,n 为在单程天线方向图3dB 宽度内收到的脉冲数。
中频回波信号经过相位检波器后,相当于把中频信号的频谱搬移到零频率附近,根据目标多普勒频移d f 的不同,相位检波后谱线d r f f n ±的具体位置也有差异,每根谱线均按脉冲串包络的频谱形状展宽。
⑵ 杂波频谱对于固定点杂波,当天线不扫描时,固定杂波的频谱是位于r f n 上的谱线,可以用对消器全部滤去。
当天线扫描时,由于回波数目有限,谱线将展宽。
由于天线扫描引起双程天线方向图对回波信号调幅,杂波谱展宽可用高斯函数表示为2220)(sfe Gf G σ-= (6.5.11)其中n s 265.0=σ,n 为在单程天线方向图3dB 宽度内的脉冲数。
设θT 为天线照射目标的等效时间,则r f T n θ=,即θσT s 265.0=,即s σ与目标照射时间成正比。
杂波信号的功率谱的实验公式可近似为⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-==2022exp )()(f f a g f g f W (6.5.12)其中:)(f W 作为频率函数的杂波功率谱,)(f g 杂波的傅立叶变换,0f 雷达载波,a 和杂波相关的参数。
杂波频谱可以用杂波频率分布的均方根值)(Hz c σ或速度分布的均方根值)(s m v σ来表示,式(2-12)可写为⎪⎪⎭⎫⎝⎛-=⎪⎪⎭⎫ ⎝⎛-=22202208exp 2exp )(v c f W f W f W σλσ (6.5.13)其中:20g W =,λσσvc 2=,0f c =λ ,可得228vc a σ=。
2c σ为杂波功率谱方差。
v σ为杂波内部起伏运动速度的均方根值,和工作波长无关。
相同的v σ值,对不同的雷达工作波长产生的杂波谱线的宽度也是不同的。
工作波长越短,杂波谱的展宽越严重。
图6.4.1中的载波频率0f 为1GHz 。
00df f +0d0d d0d(b)(c)(d)图6.5.3 杂波的功率谱在接收机前端引入发射信号作为基准电压,可得到收发频率的差频电压,即多普勒电压。
图6.5.4给出各主要点的频谱图。
00df f +0d0df f -d0d(b)(c)(d)图6.5.4 主要点频谱图及滤波器特性相位检波后的频谱如图(d),固定杂波的频谱在零点,图中给出的是一条谱线。
实际中,由于天线扫描收到的回波脉冲数有限,谱线会有一定程度的展宽,由于系统不稳等原因,杂波谱中还会出现杂乱分量,把它近似看成均匀谱。
本节要设计的滤波器特性如图6.5.5 地杂波的功率谱图6.5.4(d)所示,取出动目标频谱,滤除杂波频谱。
滤波器凹口和通带的平坦程度是关注的特性。
动目标滤波器要满足的要求:(1)凹口适当扩宽,与杂波梳状谱宽度相当。
(2)杂波有多普勒频移,即不在零频时,滤波器凹口要对准杂波谱平均多普勒位置。
(3)凹口深度能使杂波尽量多的衰减,目标回波能在尽可能大的速度范围内有较大输出。
改善因子是综合评定滤波器性能的参数。
6.5.2 MTI 滤波器 (1)MTI 滤波器原理当杂波和运动目标回波在雷达显示器上同时显示时,会使目标的观察变得很困难。
如果目标处在强杂波背景内,弱的目标淹没在强杂波中,特别是当强杂波使接收机发生过载时,将很难发现目标。
目标回波和杂波在时间域上难以区分,但由于目标的速度远大于背景的速度,目标回波的多普勒频移远大于背景的多普勒频移,从而可在频域上区分目标与杂波。
动目标显示滤波器(MTI )利用运动目标回波和杂波在频谱上的区别,有效地抑制杂波而提取信号。
在雷达上加装MTI 滤波器,大大的改善了雷达在强杂波背景中检测运动目标的能力。
MTI 有多种实现方法,包括传统的相消器和各种优化的FIR 滤波器。
采用重复参差和时变加权的MTI 体制可以克服盲速。
MTI 和MTD 是对多个回波数据进行处理,因此数据需要进行存储。
其中每一行的数据是沿距离单元采样值,反映了某一距离单元的信号特征。
每一列的数据为从相同的距离单元,依次间隔一个脉冲重复周期的采样值,这些数据的变化反映了在同一距离单元目标的变化情况。
MTI 和MTD 都是对同一距离单元的数据,即同一列的数据进行处理。
通常MTI 雷达滤波器如图6.5.6所示图,图中Tr 为雷达重复周期,在这里作为延迟线的延迟时间,i w 为滤波器权系数值。
图6.5.6 MTI 滤波器的组成传统的MTI 相消器可以滤除零频杂波,性能不高,改善因子在20dB 左右。
优化的MTI 滤波器可以满足上一节提出的动目标滤波器要求,现在就滤波器的设计讨论如下。
(2) MTI 滤波器设计1.传统MTI 滤波器设计:在相位检波器输出端,固定目标的回波是一串振幅不变的脉冲,而运动目标的回波是一串振幅调制的脉冲。
在把回波信号送到终端显示器前,必须先消除固定目标回波。
最直接的方法是将相邻重复周期的回波信号相减,则固定目标回波由于振幅不变而互相抵消,运动目标回波相减后剩下相邻重复周期振幅变化的部分。
传统的MTI 滤波器有两种形式:非递归形和递归形。
(a) 非递归滤波器不带反馈的滤波器称为非递归型滤波器。
下面以一次对消器为例进行说明。
一次对消器,即二脉冲对消。
其结构图如图6.5.7(a),对消器的输入X(z)相位检波器的输出信号。
它是一个单零点系统,零点位置在1z =±,令s j ω=,即j Tz eω=在Z 平面上是单位圆。
(a)框图 (b) 零点图图6.5.7 一次对消滤波器由相位检波器输出的脉冲包络为)(cos )(0t U t u ϕ= (6.5.14)ϕ为回波与基准电压之间的相位差0000)(2)(ϕωωωϕ-=--=-=t ct v R t t d r r (6.5.15)回波信号按重复周期r T 出现,将回波信号延迟一周期后,其包络是])(cos[)(00'ϕω--=r d T t U t u (6.5.16)⎪⎭⎫⎝⎛--⎪⎭⎫ ⎝⎛=-=∆00'2sin 2sin 2ϕωωωr d d r d T T U u u u (6.5.17)输出包络为一多普勒频率的正弦信号,其频率为2sin20rd T U ω(6.5.18)为多普勒频率的函数。