Lyapunov方程求解(附件)
- 格式:doc
- 大小:192.00 KB
- 文档页数:10
lyapunov方程的求解
听说Lyapunov方程了吗?就是那个让一堆数学大师头疼的东西。
不过别担心,咱们就用大白话聊聊。
说简单点,Lyapunov方程就像是给系统稳定性拍了个“X光”,能看出系统内部的问题。
你想想看,要是你的自行车轮子不稳,骑
起来就得摇摇晃晃,对吧?这就是因为稳定性没搞好。
而Lyapunov
方程就是帮我们找到那个能让系统稳如泰山的“魔法公式”。
话说回来,求解Lyapunov方程可不是件轻松的事儿。
你得有点
数学功底,还得有点耐心和毅力。
有时候,解这个方程就像是解一
个复杂的拼图游戏,得把各个碎片拼在一起,才能看到完整的图画。
不过,好消息是,现在有了电脑和数学软件,求解Lyapunov方
程变得容易多了。
就像是你有了一个超级助手,帮你处理那些繁琐
的计算和推理。
这样一来,你就能更快地找到答案,也不用那么头
疼了。
所以啊,虽然Lyapunov方程听起来有点吓人,但只要咱们用对
方法,就能轻松搞定它。
就像是你面对一个看似复杂的问题,只要找到了解决方法,就能迎刃而解。
这就是数学的魅力所在!。
lyapunov方程求数值解
Lyapunov方程是控制理论中的一个重要方程,用于求解线性系
统的稳定性。
Lyapunov方程的一般形式为AX + XA^T = -Q,其中A
是系统的状态矩阵,X是要求解的对称正定矩阵,Q是一个对称正定
矩阵。
Lyapunov方程的解决对于确定系统的稳定性和性能至关重要。
要求解Lyapunov方程的数值解,通常可以采用以下方法之一:
1. Schur分解法,这是一种常用的数值方法,它将状态矩阵A
分解为一个正交矩阵和一个上三角矩阵的乘积。
然后,可以将Lyapunov方程转化为一个更容易求解的形式,进而求解X的数值解。
2. 离散时间Lyapunov方程的数值解,对于离散时间系统,可
以利用迭代法或者数值线性代数方法来求解Lyapunov方程的数值解。
3. MATLAB等数学软件,许多数学软件包括MATLAB都提供了专
门用于求解Lyapunov方程的函数或工具箱,可以直接利用这些工具
来求解数值解。
无论采用哪种方法,都需要注意数值解的稳定性和精度,尤其
是在系统维度较大时。
此外,还需要对所得到的数值解进行验证,确保其满足Lyapunov方程的定义和性质。
总之,求解Lyapunov方程的数值解需要结合数值方法和专业工具,以确保得到准确可靠的结果。
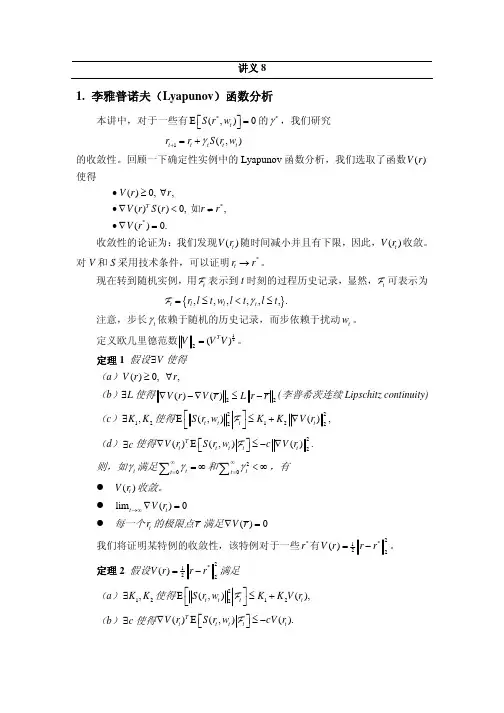
讲义81. 李雅普诺夫(Lyapunov )函数分析本讲中,对于一些有*E (,)0t S r w ⎡⎤=⎣⎦的*γ,我们研究1(,)t t t t t r r S r w γ+=+的收敛性。
回顾一下确定性实例中的Lyapunov 函数分析,我们选取了函数()V r 使得** ()0, ,()()0, , ()0.T V r r V r S r r r V r •≥∀•∇<≠•∇=如收敛性的论证为:我们发现()t V r 随时间减小并且有下限,因此,()t V r 收敛。
对V 和S 采用技术条件,可以证明*t r r →。
现在转到随机实例,用t F 表示到t 时刻的过程历史记录,显然,t F 可表示为{},,,,,,.t l l t r l t w l t l t γ=≤<≤F注意,步长t γ依赖于随机的历史记录,而步依赖于扰动t w 。
定义欧几里德范数122()T V V V =。
定理1 假设V ∃使得(a )()0, ,V r r ≥∀(b )L ∃使得22()()V r V r L r r ∇−∇≤−(李普希茨连续Lipschitz continuity) (c )12,K K ∃使得221222E (,)(),t t t t S r w K K V r ⎡⎤≤+∇⎣⎦F(d )c ∃使得22()E (,)().T t t t t t V r S r w c V r ∇⎡⎤≤−∇⎣⎦F 则,如t γ满足0t t γ∞==∞∑和20t t γ∞=<∞∑,有z ()t V r 收敛。
z lim ()0t t V r →∞∇=z 每一个t r 的极限点r 满足()0V r ∇=我们将证明某特例的收敛性,该特例对于一些*r 有2*122()V r r r =−。
定理2 假设2*122()V r r r=−满足(a )12,K K ∃使得2122E (,)(),t t t t S r w K K V r ⎡⎤≤+⎣⎦F(b )c ∃使得()E (,)().T t t t t t V r S r w cV r ∇⎡⎤≤−⎣⎦F则,如t γ满足0t t γ∞==∞∑和20t t γ∞=<∞∑,有*t r r →, w.p.1(以概率1)我们用下面的上鞅收敛定理证明定理2。
李雅普诺夫方程求解李雅普诺夫方程是一个非线性偏微分方程,具体形式如下:ut + uux + αuxx = 0其中,u(x,t)为未知函数,α为常数。
它的物理意义是描述一维非粘性流体中的波动行为。
该方程的解析解一般较难求解,但是可以通过一些数值方法进行近似求解。
求解李雅普诺夫方程的一种经典方法是使用有限差分法。
该方法将连续的一维空间离散化成N个点,同时将时间轴也进行离散化,得到一个网格结构。
在这个网格上,我们可以用差分方程来逼近方程的求解。
具体来说,我们可以使用简单的方法,比如向前欧拉方法(即前向差分法)或者向后欧拉方法(即后向差分法),也可以使用更高阶的方法,比如Crank-Nicolson方法。
无论使用什么方法,都需要注意网格的选择。
如果网格太粗,求解结果的精度会降低;如果网格太细,计算时间会增加,同时出现数值不稳定的现象。
通常情况下,我们需要通过试探,确定合适的网格大小。
求解李雅普诺夫方程的另外一种方法是使用数值模拟法。
该方法可以对方程进行更加精细的求解,同时可以考虑更加复杂和现实的情形。
数值模拟法的基本思想是将流体划分成一个个微小的体积元,同时考虑它们之间的相互作用和力的作用。
在这个基础上,我们可以模拟出流体在某一时刻的状态,并利用时间迭代,得到流体在未来各个时刻的状态。
数值模拟法的缺点是计算速度较慢,同时也难以处理特定的边界条件。
但是,它适用于各种不同的物理问题,并且也可以处理更加复杂的流体现象。
总的来说,李雅普诺夫方程是一个非常重要的理论问题。
虽然它的解析解较为复杂,但是通过数值方法和物理模拟,我们可以有效地求解它,同时深入研究一维非粘性流体的波动行为。
广西大学实验报告纸学院:电气工程学院 专业:自动化 成绩: 组员:陈平忠(1302120238) 黄智榜(1302120237) 班级:实验地点:808实验室 2015年12月 18日 实验内容:Lyapunov 方程求解【实验目的】1、掌握求解Lyapunov 方程的一种方法,了解并使用MATLAB 中相应函数。
【实验设备与软件】1、硬件:PC 机一台;软件:MATLAB/Simulink 。
【实验原理】1、线性定常系统渐进稳定的Lyapunov 方程判据线性定常连续系统为渐进稳定的充要条件是:对给定的任一个正定对称阵Q ,都存在唯一的对称正定阵P ,满足如下矩阵Lyapunov 方程:Q PA P A T -=+该条件在传递函数最小实现下等价于:全部特征根都是负实数或实部为负的复数,亦即全部根都位于左半复平面。
线性定常离散系统为渐进稳定的充要条件:对给定的任一个正定对称阵Q ,都存在唯一的对称正定阵P ,满足如下矩阵Lyapunov 方程:Q P PG G T -=-该条件在传递函数最小实现下等价于:全部特征根的摸均小于1,即都在单位圆内。
2、在MATLAB 控制工具箱中,函数lyap 和dlyap 用来求解lyapunov 方程。
P =lyap (T A ,Q )可解连续时间系统的lyapunov 方程,其中,Q 和A 为具有相同维数的方阵(A 是系统矩阵)。
如果Q 是对称的,则解P 也是对称的。
P =dlyap (T G ,Q )可解离散时间系统的lyapunov 方程,其中,Q 和G 为具有相同维数的方阵(G 是系统矩阵)。
如果Q 是对称的,则解P 也是对称的。
3、连续情况下的最小相位系统:系统的零点均在左半复平面,但系统首先是稳定的,其他情况为非最小相位系统。
【实验内容、方法、过程与分析】 题目1实验内容:输入连续状态空间模型()∑=D C,B,A,:[]0,1100,0001,0100001000014283==⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=D C B A(1)选取正定矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1000010000100001Q ,求稳定性判别矩阵P ,判定系统是否稳定。
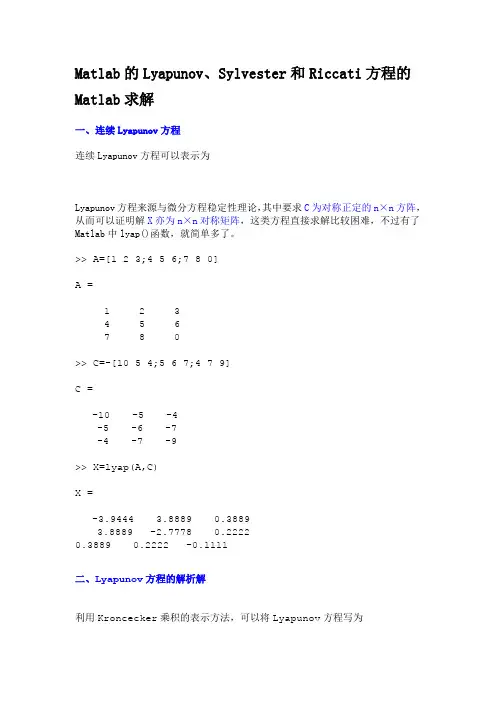
Matlab的Lyapunov、Sylvester和Riccati方程的Matlab求解一、连续Lyapunov方程连续Lyapunov方程可以表示为Lyapunov方程来源与微分方程稳定性理论,其中要求C为对称正定的n×n方阵,从而可以证明解X亦为n×n对称矩阵,这类方程直接求解比较困难,不过有了Matlab中lyap()函数,就简单多了。
>> A=[1 2 3;4 5 6;7 8 0]A =1 2 34 5 67 8 0>> C=-[10 5 4;5 6 7;4 7 9]C =-10 -5 -4-5 -6 -7-4 -7 -9>> X=lyap(A,C)X =-3.9444 3.8889 0.38893.8889 -2.7778 0.22220.3889 0.2222 -0.1111二、Lyapunov方程的解析解利用Kroncecker乘积的表示方法,可以将Lyapunov方程写为function x=lyap2(A,C)%Lyapunov方程的符号解法n=size(C,1);A0=kron(A,eye(n))+kron(eye(n),A);c=C(:);x0=-inv(A0)*c;x=reshape(x0,n,n)例子>>A=[1 2 3;4 5 6;7 8 0];>>C=-[10 5 4;5 6 7;4 7 9];>>x=lyap2(sym(A),sym(C))x =[ -71/18, 35/9, 7/18][ 35/9, -25/9, 2/9][ 7/18, 2/9, -1/9]三、离散Lyapunov方程离散Lyapunov方程的一般形式为Matlab中直接提供了dlyap()函数求解该方程:X=dlyap(A,Q)其实,如果A矩阵非奇异,则等式两边同时右乘得到就可以将其变换成连续的Sylvester方程而Sylvester方程是广义Lyapunov方程,故离散的Lyapunov方程还可以使用下面的方法求解B=-inv(A’)C=Q*in v(A’)X=lyap(A,B,C)下面总结下我们上面的讲到的知识点:X=lyap(A,C) 连续Lyapunov方程数值解法X=lyap2(A,C) 连续Lyapunov方程符号解法X=lyap(A,B,C) 广义Lyapunov方程,即Sylvester方程X=dlyap(A,Q)或者X=lyap(A,-inv(A’),Q*inv(A’))离散Lyapunov方程Sylvester方程Matlab求解Sylvester方程的一般形式为该方程又称为广义的Lyapunov方程,式中A是n×n方阵,B是m×m方阵,X 和C是n×m矩阵。
离散时间的lyapunov方程
离散时间的Lyapunov方程在控制理论和动力系统中起着重要作用。
Lyapunov方程是由俄罗斯数学家亚历山大·米哈伊洛维奇·李
亚普诺夫在1892年提出的,用于研究非线性系统的稳定性。
离散时
间的Lyapunov方程描述了动力系统在离散时间下的稳定性和收敛性。
离散时间的Lyapunov方程可以表示为:
\[ V(x_{k+1}) V(x_k) = -\alpha (x_k) \]
其中,\( V(x_k) \)是Lyapunov函数,\( x_k \)是系统在第
k个离散时间点的状态,\( \alpha (x_k) \)是一个非负函数。
Lyapunov函数通常被选为系统状态的二次型函数,以便通过Lyapunov方程来分析系统的稳定性。
通过离散时间的Lyapunov方程,我们可以判断系统在不同状态
下的稳定性。
如果对于所有的状态\( x_k \),都存在一个非负函数
\( \alpha (x_k) \),使得Lyapunov方程成立,那么系统在离散时
间下是稳定的。
这种分析方法在控制系统的设计和动力系统的研究
中具有重要的应用价值。
离散时间的Lyapunov方程为我们提供了一种有效的工具,用于研究非线性系统在离散时间下的稳定性和收敛性。
通过对Lyapunov 函数和非负函数的选择,我们可以对系统的稳定性进行定量分析,并设计出有效的控制策略。
因此,离散时间的Lyapunov方程对于控制理论和动力系统的研究具有重要的理论和实际意义。
lyapunov方程
拉普拉斯-马尔可夫方程首先把系统动态行为描述为一个非线性方程,然后把它转换成一个线性的状态方程。
如果把非线性方程分解为多个线性方程,那么拉普拉斯-马尔可夫方程就可以被写成一个线性状态方程:X(t+1)=AX(t)+B其中,X(t)是一个n维向量,表示系统状态在t时刻的变化,A是n×n维矩阵,表示系统的动态行为,B是n维向量,表示系统的外部输入。
拉普拉斯-马尔可夫方程也可以用来解决一个更复杂的问题,称为“Lyapunov方程”。
Lyapunov方程是一种非线性系统理论中的一种工具,它通过求解一个特殊的矩阵方程来描述系统的稳定性,也就是描述系统动态行为是否稳定。
Lyapunov 方程是一个不等式,它要求系统的状态变量满足一定的关系,这些关系可以通过拉普拉斯-马尔可夫方程求解。
实验4-Laypunov方程求解《现代控制理论》实验四院系:学生姓名:学号:一:原理1.李雅普诺夫稳定性概念忽略输入后,非线性时变系统的状态方程如下),(t x f x =& (1)式中,x 为n 维状态向量;t 为时间变量;),(t x f 为n 维函数,其展开式为12(,,,,)i i n x f x x x t =&L n i ,,1Λ= 假定方程的解为 ),;(00t x t x ,0x 和0t 分别为初始状态向量和初始时刻,0000),;(x t x t x =。
平衡状态 如果对于所有t ,满足0),(==t x f x e e & (2)的状态e x 称为平衡状态(又称为平衡点)。
平衡状态的各分量不再随时间变化。
若已知状态方程,令0=x& 所求得的解x ,便是平衡状态。
对于线性定常系统Ax x=&,其平衡状态满足0=e Ax ,如果A 非奇异,系统只有惟一的零解,即存在一个位于状态空间原点的平衡状态。
至于非线性系统,0),(=t x f e 的解可能有多个,由系统状态方程决定。
控制系统李雅普诺夫意义下的稳定性是关于平衡状态的稳定性,反映了系统在平衡状态附近的动态行为。
鉴于实际线性系统只有一个平衡状态,平衡状态的稳定性能够表征整个系统的稳定性。
对于具有多个平衡状态的非线性系统来说,由于各平衡状态的稳定性一般并不相同,故需逐个加以考虑,还需结合具体初始条件下的系统运动轨迹来考虑。
本节主要研究平衡状态位于状态空间原点(即零状态)的稳定性问题,因为任何非零状态均可以通过坐标变换平移到坐标原点,而坐标变换又不会改变系统的稳定性(a )李雅普诺夫意义下的稳定性 (b )渐近稳定性 (c ) 不稳定性图1 稳定性的平面几何表示2.李雅普诺夫稳定性定义(1)李雅普诺夫稳定性:如果对于任意小的ε > 0,均存在一个0),(0>t εδ,当初始状态满足δ≤-e x x 0时,系统运动轨迹满足lim t →∞ε≤-e x t x t x ),;(00,则称该平衡状态e x 是李雅普诺夫意义下稳定的,简称是稳定的。
Lyapunov矩阵方程式的解析解
赵群飞;张国伍
【期刊名称】《系统工程》
【年(卷),期】1991(9)4
【摘要】本文提出了一种Lyapunov矩阵方程的解析解法。
运用此法,通过简单的标量计算降低了矩阵运算处理的阶数,而且在方程唯一解存在的情况下,对已知矩阵不加任何条件限制,也不用施行任何矩阵变换运算,就可求得其解。
【总页数】5页(P28-32)
【关键词】Lyapunov矩阵方程;解析解
【作者】赵群飞;张国伍
【作者单位】北方交通大学应用分析系统研究所;北方交通大学
【正文语种】中文
【中图分类】O241.6
【相关文献】
1.一类混合型Lyapunov矩阵方程的对称正定解 [J], 黄敬频
2.一类广义Lyapunov矩阵方程的正定解 [J], 李春梅;段雪峰;彭振赟;江祝灵
3.两类基于MATLAB的Lyapunov与Riccati线性矩阵不等式可行解的算法分析与验证 [J], 薛亚宏
4.求Lyapunov矩阵方程的双对称解的迭代算法 [J], 尚丽娜;张凯院
5.关于Lyapunov矩阵方程的公共解 [J], 周后卿
因版权原因,仅展示原文概要,查看原文内容请购买。
广西大学实验报告纸
学院:电气工程学院 专业:自动化 成绩: 组员:陈平忠(1302120238) 黄智榜(1302120237) 班级:
实验地点:808实验室 2015年12月 18日 实验内容:Lyapunov 方程求解
【实验目的】
1、掌握求解Lyapunov 方程的一种方法,了解并使用MATLAB 中相应函数。
【实验设备与软件】
1、硬件:PC 机一台;软件:MATLAB/Simulink 。
【实验原理】
1、线性定常系统渐进稳定的Lyapunov 方程判据
线性定常连续系统为渐进稳定的充要条件是:对给定的任一个正定对称阵Q ,都存在唯一的对称正定阵P ,满足如下矩阵Lyapunov 方程:
Q PA P A T -=+
该条件在传递函数最小实现下等价于:全部特征根都是负实数或实部为负的复数,亦即全部根都位于左半复平面。
线性定常离散系统为渐进稳定的充要条件:对给定的任一个正定对称阵Q ,都存在唯一的对称正定阵P ,满足如下矩阵Lyapunov 方程:
Q P PG G T -=-
该条件在传递函数最小实现下等价于:全部特征根的摸均小于1,即都在单位圆内。
2、在MATLAB 控制工具箱中,函数lyap 和dlyap 用来求解lyapunov 方程。
P =lyap (T A ,Q )可解连续时间系统的lyapunov 方程,其中,Q 和A 为具有相同维数的方阵(A 是系统矩阵)。
如果Q 是对称的,则解P 也是对称的。
P =dlyap (T G ,Q )可解离散时间系统的lyapunov 方程,其中,Q 和G 为具有相同维数的方阵(G 是系统矩阵)。
如果Q 是对称的,则解P 也是对称的。
3、连续情况下的最小相位系统:系统的零点均在左半复平面,但系统首先是稳定的,其他情况为非最小相位系统。
【实验内容、方法、过程与分析】 题目1实验内容:
输入连续状态空间模型()∑=D C,B,A,:
[]0,110
0,0001,01
00
001000014283==⎥⎥⎥⎥
⎦
⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢
⎢⎣⎡----=D C B A
(1)选取正定矩阵⎥
⎥
⎥⎥⎦
⎤⎢⎢⎢
⎢⎣⎡=100001000010
0001Q ,求稳定性判别矩阵P ,判定系统是否稳定。
Q PA P A T -=+
(2)求线性系统阶跃响应曲线,并判定是否为最小相位系统, (3)求系统的实现,判定是否是最小实现并比较。
题目1实验过程及结果分析:
根据题意,在实验中,先通过运算可以得出结果,根据结果做出如下的.m 文件 程序:
①、由实验.m 文件程序运行后结果:
A=[-3 -8 -2 -4;1 0 0 0;0 1 0 0;0 0 1 0]; B=[1;0;0;0]; C=[0 0 1 1]; D=0;
Q=[1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1]; p=lyap(A',Q) y=ss(A,B,C,D) [V,X]=eig(A) step(y)
得到正定矩阵P :
②、由题意得出系统的响应曲线:
由图可知:该系统是渐进稳定的。
求特征根
x =
Columns 1 through 2
-1.4737 + 2.2638i 0.0000 + 0.0000i
0.0000 + 0.0000i -1.4737 - 2.2638i
0.0000 + 0.0000i 0.0000 + 0.0000i
0.0000 + 0.0000i 0.0000 + 0.0000i
Columns 3 through 4
0.0000 + 0.0000i 0.0000 + 0.0000i
0.0000 + 0.0000i 0.0000 + 0.0000i
-0.0263 + 0.7399i 0.0000 + 0.0000i
0.0000 + 0.0000i -0.0263 - 0.7399i
由结果可以得出,此系统特征根的实部全部都为负数,亦全部的根都在左边平面。
所以该系统为最小相位系统。
所以,根据题意,更改A矩阵,求其阶跃响应曲线,并进行比较得:
之前的A矩阵:
更改之前的特征值:
x =
Columns 1 through 2
-1.4737 + 2.2638i 0.0000 + 0.0000i
0.0000 + 0.0000i -1.4737 - 2.2638i
0.0000 + 0.0000i 0.0000 + 0.0000i
0.0000 + 0.0000i 0.0000 + 0.0000i Columns 3 through 4
0.0000 + 0.0000i 0.0000 + 0.0000i
0.0000 + 0.0000i 0.0000 + 0.0000i -0.0263 + 0.7399i 0.0000 + 0.0000i
0.0000 + 0.0000i -0.0263 - 0.7399i 更改前的阶跃响应:
更改之后的A矩阵:
更改之后的特征值: X =
4.7926 + 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i -1.7297 + 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i -0.0315 + 0.6939i 0.0000 + 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i -0.0315 - 0.6939i 更改后的阶跃响应:
对比特征值可知,更改矩阵A 后特征根有一个为正数,即在右半平面; 对比阶跃响应图可知,更改矩阵A 后,其阶跃响应为发散的。
2、输入离散状态空间模型()∑=D C,H,G,
[]0,100,321,001323031==⎥⎥
⎥⎦
⎤
⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=D C H G
(1)选定正定矩阵⎥⎥
⎥⎦
⎤
⎢⎢⎢⎣⎡=100010001Q ,求稳定性判别矩阵P 。
(2)请定义离散情况下的最小相位系统。
(3)求线性系统阶跃响应曲线,并按你所定义的判别矩阵是否为最小相位系统。
根据题意,在实验中,先通过运算可以得出结果,根据结果做出如下的c 文件程序:
①、由实验c 文件程序运行后结果: G=[1 3 0;-3 -2 -3;1 0 0]; H=[1;2;3]; C=[0 0 1]; D=0;
Q=[1 0 0;0 1 0;0 0 1]; P=dlyap(G',Q) y=ss(G,H,C,D) [V,X]=eig(G) step(y)
得到矩阵P :
(2)、请定义离散情况下的相位系统
对于线性定常离散系统,全部特征根的模均小于1,即都在单位圆内,才能认为是最小相位系统。
由CV明显可看出不满足上述条件,且通过图形可知,系统不稳定。
现改变G 的值:
由图可知,阶跃响应最终稳定,满足线性定常离散系统的条件,即极点均为于单位圆内。
【实验总结】
2、通过本次实验了解并掌握了Lyapunov方程的一种用MATLAB求解的方法,并熟悉了线
性定常系统渐进稳定的Lyapunov方程判据和求解lyapunov方程的一些函数。