柔体动力学介绍
- 格式:docx
- 大小:294.41 KB
- 文档页数:11
柔性物体的产生根本是基于动力学中的粒子系统。
柔性物体的建立是存在于原始物体上面的。
例如我们要建立一个柔性物体,在建立的时候MAY A会以此物体作为原形,建立新的柔性物体。
(实际上是在原始物体的基础上复制,构造新的物体,然后给新物体连接上粒子系统,使其各个顶点和粒子系统连接)在创建柔性物体时候,后面的选项可以确定原始物体与柔体之间的关系。
(柔体和原始物体之间拥有目标或者其他关系,可以通过人为设置改变)柔性物体的根本是动力学中的粒子。
注意建立柔性物体时候后面各个选项的意思。
重点:目前存在的系统:布料系统,动力学中的刚体系统,粒子系统此3个系统之间在各自的范围内部是独立存在的。
也就是说一个物体可以同时拥有三个系统。
利用粒子来创建由无到有的物体。
按照步骤建立给其创建柔性物体。
由于要让物体先消失,然后再出现。
所以对于柔性物体来说,我们需要先让此物体本人的粒子先消失然后再出现。
(先死亡再出生)所以进入该柔性物体的粒子属性结点,查看其属性。
注意里面的粒子生存周期属性,给其一个生存周期(这里需要注意,其粒子的生存周期时间的长短会影响后面的效果。
这里我们设置1即1秒,后面在做其他练习的时候我们可以设置成5即5秒,观察一秒和5秒的不同)然后运行动画,我们会发现当动画演示到1秒的时候物体并没有消失,这是因为其粒子实际上在动画运行到1秒之后会消失(假设1秒为24真)。
当第25真的时候,粒子会重新出现。
这个时候我们需要改变下面粒子与柔性物体连接的属性。
Soft Body Attributes,中的,将与历史纪录相关不沟选。
再次播放动画,会发现碗消失后不会再次出现。
(这里为什么用不同的选向会有如此效果,原因待定。
)现在,碗已经消失了,这个时候我们把碗消失的状态定为初始状态。
现在屏幕上什么都没有了。
但是通过大纲我们可以发现物体实际上是存在的。
而看不见就好比物体的隐藏与显示属性粒子这个时候的死亡就好比由于需要被隐藏了。
现在,我们再建立一个粒子发射器。
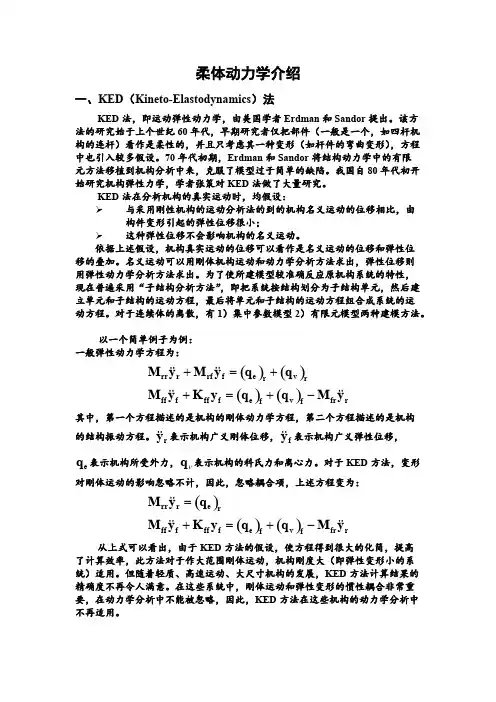
柔体动力学介绍一、KED (Kineto-Elastodynamics )法KED 法,即运动弹性动力学,由美国学者Erdman 和Sandor 提出。
该方法的研究始于上个世纪60年代,早期研究者仅把部件(一般是一个,如四杆机构的连杆)看作是柔性的,并且只考虑其一种变形(如杆件的弯曲变形),方程中也引入较多假设。
70年代初期,Erdman 和Sandor 将结构动力学中的有限元方法移植到机构分析中来,克服了模型过于简单的缺陷。
我国自80年代初开始研究机构弹性力学,学者张策对KED 法做了大量研究。
KED 法在分析机构的真实运动时,均假设: 与采用刚性机构的运动分析法的到的机构名义运动的位移相比,由构件变形引起的弹性位移很小; 这种弹性位移不会影响机构的名义运动。
依据上述假设,机构真实运动的位移可以看作是名义运动的位移和弹性位移的叠加。
名义运动可以用刚体机构运动和动力学分析方法求出,弹性位移则用弹性动力学分析方法求出。
为了使所建模型较准确反应原机构系统的特性,现在普遍采用“子结构分析方法”,即把系统按结构划分为子结构单元,然后建立单元和子结构的运动方程,最后将单元和子结构的运动方程组合成系统的运动方程。
对于连续体的离散,有1)集中参数模型2)有限元模型两种建模方法。
以一个简单例子为例:一般弹性动力学方程为:()()()()+=++=+-rr r rf f e v r rff f ff f e v fr rf f M y M y q q M y K y q q M y 其中,第一个方程描述的是机构的刚体动力学方程,第二个方程描述的是机构的结构振动方程。
表示机构广义刚体位移,表示机构广义弹性位移,r y f y 表示机构所受外力,表示机构的科氏力和离心力。
对于KED 方法,变形e q v q 对刚体运动的影响忽略不计,因此,忽略耦合项,上述方程变为:()()()=+=+-rr r e rff f ff f e v fr rf f M y q M y K y q q M y 从上式可以看出,由于KED 方法的假设,使方程得到很大的化简,提高了计算效率,此方法对于作大范围刚体运动,机构刚度大(即弹性变形小的系统)适用。
收稿日期:20010226作者简介:仲 昕(1973-),女(汉),山东,博士生E 2m ail :xinzhong 99@sina .com 仲 昕文章编号:100328728(2002)0320387203多柔体系统动力学建模理论及其应用仲 昕,杨汝清,徐正飞,高建华(上海交通大学机器人研究所,上海 200030)摘 要:以往对机械系统进行动力学分析,要么将其抽象为集中质量—弹簧—阻尼系统,要么将其中的每个物体都看作是不变形的刚性体,但如果系统中有一些物体必须计及其变形,就必须对机械系统建立多柔体模型。
本文阐述了柔性体建模理论,并用汽车前悬架多柔体模型进行举例说明。
结果表明多柔体模型的仿真结果较多刚体动力学模型的仿真结果更接近道路试验数据结果,充分验证了多柔体建模的必要性和有效性。
关 键 词:多柔体模型;柔性体建模理论中图分类号:TH 122 文献标识码:AD ynam ic M odeli ng of M ulti -Flex ible Syste m ——Theory and Applica tionZHON G X in ,YAN G R u 2qing ,XU Zheng 2fei ,GAO J ian 2hua (In stitu te of Robo tics ,Shanghai J iao tong U n iversity ,Shanghai 200030)Abstract :In dynam ic analyses of a m echan ical system ,it is often ab stracted as a cen tralized m ass 2sp ring 2damper system ,o r every part in the system is regarded as a rigid body .How ever ,if som e parts defo rm obvi ou sly and their defo rm ati on m u st be taken in to con siderati on ,the m echan ical system m u st be modeled as a m u lti 2flex ib le body .In th is paper ,the flex ib le body modeling theo ry is demon strated firstly .T hen ,an examp le of modeling a k ind of au tomob ile’s fron t su spen si on as a m u lti 2flex ib le system is show n .F inally ,it is show n that the si m u lati on resu lts of m u lti 2flex ib le dynam ic model agree w ith the road test data mo re than tho se of m u lti 2rigid dynam ic model do .T hu s ,it is fu lly testified that u sing m u lti 2flex ib le body theo ry to model is necessary and effective .Key words :M u lti 2flex ib le body ;F lex ib le body modeling theo ry 机械系统一般是由若干个物体组成,通过一系列的几何约束联结起来以完成预期动作的一个整体,因此也可以把整个机械系统叫做多体系统。
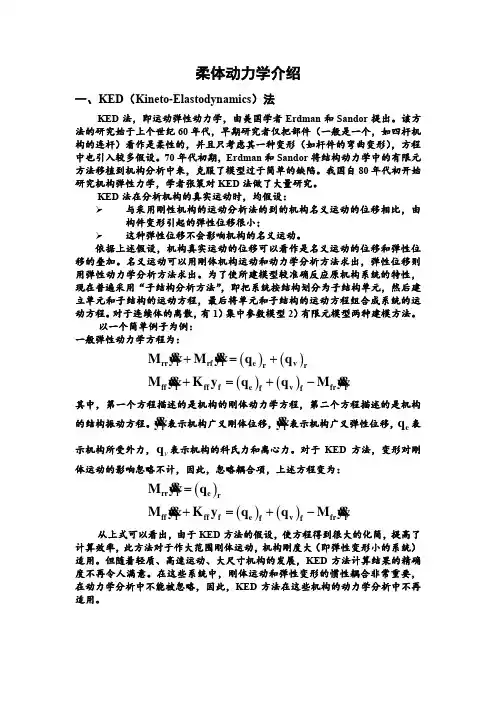
柔体动力学介绍一、KED (Kineto-Elastodynamics )法KED 法,即运动弹性动力学,由美国学者Erdman 和Sandor 提出。
该方法的研究始于上个世纪60年代,早期研究者仅把部件(一般是一个,如四杆机构的连杆)看作是柔性的,并且只考虑其一种变形(如杆件的弯曲变形),方程中也引入较多假设。
70年代初期,Erdman 和Sandor 将结构动力学中的有限元方法移植到机构分析中来,克服了模型过于简单的缺陷。
我国自80年代初开始研究机构弹性力学,学者张策对KED 法做了大量研究。
KED 法在分析机构的真实运动时,均假设:与采用刚性机构的运动分析法的到的机构名义运动的位移相比,由构件变形引起的弹性位移很小;这种弹性位移不会影响机构的名义运动。
依据上述假设,机构真实运动的位移可以看作是名义运动的位移和弹性位移的叠加。
名义运动可以用刚体机构运动和动力学分析方法求出,弹性位移则用弹性动力学分析方法求出。
为了使所建模型较准确反应原机构系统的特性,现在普遍采用“子结构分析方法”,即把系统按结构划分为子结构单元,然后建立单元和子结构的运动方程,最后将单元和子结构的运动方程组合成系统的运动方程。
对于连续体的离散,有1)集中参数模型2)有限元模型两种建模方法。
以一个简单例子为例: 一般弹性动力学方程为:()()()()+=++=+-rr r rf f e v r rff f ff f e v fr rf f M y M y q q M y K y q q M y其中,第一个方程描述的是机构的刚体动力学方程,第二个方程描述的是机构的结构振动方程。
r y 表示机构广义刚体位移,f y 表示机构广义弹性位移,e q 表示机构所受外力,v q 表示机构的科氏力和离心力。
对于KED 方法,变形对刚体运动的影响忽略不计,因此,忽略耦合项,上述方程变为:()()()=+=+-rr r e rff f ff f e v fr rf f M y q M y K y q q M y从上式可以看出,由于KED 方法的假设,使方程得到很大的化简,提高了计算效率,此方法对于作大范围刚体运动,机构刚度大(即弹性变形小的系统)适用。
刚柔耦合动力学模型刚柔耦合动力学模型是一种优秀的分析研究机械系统动态响应的方法。
它将刚体与柔体耦合在一起,综合考虑了它们各自的特性,可以更加真实地模拟实际的复杂机械系统。
刚柔耦合动力学模型着重考虑了两种物体的特性:刚体和柔体。
其中,刚体通常是指机械系统中的固定部分,它的运动状态可以由其欧拉角度量表示。
柔体则是指机械系统中的可以变形的部分,比如弹性杆、柔性连杆等,其变形可以通过弹性力表示。
通过将这两种物体结合起来,就可以建立一个更为真实的机械系统动力学模型。
在刚柔耦合动力学模型中,总的动力学方程可以分解为两个部分。
一部分是刚体的运动方程,它可以表示为:M*q''+C*q'+K*q=F(t)其中,q表示系统的状态向量,M、C、K分别是系统的质量矩阵、阻尼矩阵和刚度矩阵,F(t)是系统的外力,q'和q''分别表示状态向量q的一阶导数和二阶导数。
这个方程主要描述了刚体的运动规律。
另一部分则是柔体的运动方程,它可以表示为:D(x,t)x''+K(x)x=F(t)其中,x表示柔体的状态变量,D和K分别是柔体的阻尼系数和刚度系数,F(t)是系统的外力。
这个方程主要描述了柔体的运动规律。
通过将这两个方程组合在一起,就可以得到刚柔耦合动力学方程,即:[M 0 ;0 D(x,t)]*[q'';x'']+[C K(x);-K(x) 0]*[q';x']+[K(x) 0;00]*[q;x]=[F(t);0]其中,0代表零矩阵。
这个方程表示了整个机械系统的运动规律,可以通过求解状态向量q和柔体状态变量x的运动方程,来获得系统运动的轨迹和响应。
在实际应用中,一般采用有限元方法或类似方法来求解柔体的运动方程,求解刚体的运动方程则常采用欧拉积分或基于Runge-Kutta方法等数值方法。
除了上述的动力学方程以外,还需要考虑其他因素对机械系统的影响,比如摩擦力、已知外力等。
Maya中的柔体动力学 1作者:未知文章来源:网络点击数:487 更新时间:2009-7-30在创建柔体时,系统会自动创建一个粒子物体,所以从某一方面来讲,柔体只是粒子的集合体,然而标准粒子和柔体粒子有些不同。
一方面,柔体粒子被联接起来有一形状,另一方面,它们以一固态形状而不是点的集合体出现在屏幕上及最终渲染中。
因为这两种属性,所以柔体是特殊的,它们可以以固态几何体出现,几何体中的点和粒子物体中的粒子一一对应。
当粒子运动时,几何体中的点也会随之运动。
它们尽管复杂,但创建柔体还是容易的,只要选择模型,并告诉Maya 创建柔体便可。
如图11-25 所示为用柔体创建的一面旗。
图11-25 柔体作用效果柔体的创建方法在一新场景中创建基本NURBS 球体。
选择Dynamics|Bodies → Create Soft Body,出现Soft Options 对话框,如图11-26 所示。
图11-26 Soft Options 对话框下面是它的参数:● Creation Ooptions :该下拉列表中包括3 个选项:Make Soft :该选项直接将选中的物体转换成柔体。
Duplicate ,Make Copy Soft :在不改变原物体的情况下,以复制出的副本作为柔体。
Duplicate ,Make Original Soft :使用该选项可以直接将物体转换成柔体,并且另外复制一份原始物体。
Duplicate Upstream Graph :当选中此复选框时,系统会自动复制原始几何体,并且把复制的几何体转换为柔体。
● Hide Non-Soft Object :选中此复选框时,系统可以自动将原始的几何体隐藏起来,以节省有限的工作空间。
● Hide Non-Soft a Goal :如果取消选中此复选框,当创建柔体时必须为粒子创建目标。
● Weight :设置目标物体的权重,当该值为0 时,柔体可以自由地变形;当该值为1 时,柔体将尽量匹配目标物体的形状。

高级布料模拟:Blender中的柔体动力学技巧在Blender软件中,柔体动力学是一个非常强大的工具,可以用于模拟布料的物理行为。
它可以帮助我们更逼真地展现出布料的褶皱、流动和变形。
下面将介绍一些高级的布料模拟技巧,帮助你在Blender中更好地处理布料的动画效果。
1. 空气阻力与布料质量调节在进行布料模拟之前,我们需要先调整一些参数来控制模拟的效果。
其中一个重要的参数是空气阻力。
可以通过调节空气阻力的数值来控制布料在空气中的行为,较大的值将使得布料受到更多的阻力,较小的值则会减小阻力,使得布料更加流动。
另一个重要的参数是布料的质量。
较大的质量值会使得布料更重,更难被外力推动,而较小的质量值则会使得布料更轻盈,更容易受到外力的影响。
通过调整这两个参数,可以使布料的行为更加真实和可控。
2. 动力学碰撞与摩擦在布料模拟中,与其他物体的碰撞是一个非常重要的环节。
通过将布料与其他物体设置为碰撞对象,并调整物体之间的摩擦系数,可以模拟出更真实的碰撞效果。
对于布料与物体的碰撞,我们可以使用动力学碰撞界面来设置碰撞的类型,如布料与物体之间的弹性碰撞、摩擦碰撞等。
通过调整这些参数,可以使布料与物体之间的交互更接近真实世界的物理行为。
3. 布料拘束和表面选顶在模拟布料时,我们经常会需要控制布料的某些部分不随模拟而变形。
为此,我们可以使用布料拘束来固定布料的某些顶点,使其不受模拟的影响。
另外,在一些情况下,我们可能需要控制布料表面某些区域的顶点,以模拟特定的形状或效果。
在Blender中,可以使用表面选顶功能来选择布料表面上的部分顶点,并进行相应的调整。
4. 编辑模式下的顶点群组在进行布料模拟时,我们可能需要对布料的某些部分进行特殊处理,如使其更加柔软或更加僵硬。
为了实现这些效果,我们可以在编辑模式下创建顶点群组,并在动力学设置中调整对应的参数。
例如,可以选择布料表面的一部分顶点,将其添加到一个群组中,并调整该群组的柔体设置,使其拥有更柔软的特性。
计及动力刚化的柔体动力学
刘又午;阎绍泽;张大钧
【期刊名称】《中国机械工程》
【年(卷),期】1997(000)004
【摘要】提出两种计及动力刚化影响的动力学建模方法;有限段方法和一致线性化动力学方法。
分析了这两种动力不主动力刚化的机理,有限段方法将柔体动力学问题转化为带有柔性的多刚体体系统动力学问题,计及了几何非线性的影响,适合于解决梁式结构的动力学问题;一致线性化动力学方法将变形场描述成为变形广义坐标的非线性形式,在适当的阶段线性化,可得到一致线性化动力学方程,自然计及了动力刚化项,适合于柔体的小变形问题。
【总页数】1页(P81)
【作者】刘又午;阎绍泽;张大钧
【作者单位】天津大学;天津大学
【正文语种】中文
【中图分类】TH113
【相关文献】
1.计及剪切变形的Timoshenko梁的刚-柔耦合动力学 [J], 李彬;刘锦阳;洪嘉振
2.动力刚化与多体系统刚-柔耦合动力学 [J], 洪嘉振;蒋丽忠
3.计及剪切变形复合材料梁的刚/柔耦合动力学特性 [J], 潘科琪;刘锦阳
4.基于刚-柔耦合多柔体动力学的悬架系统分析及优化 [J], 何通俊;纪玉国
5.计及热应变的空间曲梁的刚-柔耦合动力学 [J], 刘锦阳;李彬;陆皓
因版权原因,仅展示原文概要,查看原文内容请购买。
柔性多体动力学模型建立与仿真分析一、引言柔性多体动力学模型是描述机器人、航天器、汽车等复杂系统运动和变形的重要工具,它能够准确地模拟系统的非线性动力学行为。
在科学、工程和军事等领域,准确理解和预测系统的运动行为对于设计和优化系统至关重要。
本文将探讨柔性多体动力学模型的建立与仿真分析。
二、柔性多体动力学模型的基本原理柔性多体动力学模型是由刚体和柔性体组成的,刚体用于描述系统的几何形状和质量分布,而柔性体则用于描述系统的弹性变形。
在建立柔性多体动力学模型时,需要考虑以下几个方面。
1. 刚体动力学模型刚体动力学模型主要由刚体质量、质心位置、惯性矩阵和外力矩阵等参数组成。
通过牛顿-欧拉方程,可以求解刚体的运动学和动力学参数。
2. 柔性体动力学模型柔性体动力学模型主要由弹性变形方程、弹性势能和形变能等参数组成。
通过拉格朗日方程,可以求解柔性体的运动学和动力学方程。
3. 位形坐标描述在建立柔性多体动力学模型时,需要选择合适的位形坐标描述模式。
常用的位形坐标描述模式有欧拉角、四元数和拉格朗日点坐标等。
三、柔性多体动力学模型的建立1. 刚体建模在刚体建模中,需要确定刚体的质心位置、惯性矩阵和外力矩阵等参数。
通过对刚体进行转动惯量测量、质心定位和精确测力等实验,可以得到准确的参数值。
2. 柔性体建模柔性体建模是建立柔性多体动力学模型的关键步骤之一,通过选择合适的柔性体模型和参数,可以准确地描述系统的弹性变形。
常用的柔性体模型包括弯曲梁模型、剪切梁模型和薄板模型等。
通过有限元分析和实验测试,可以获取柔性体的弹性参数和模态特性。
3. 使用有限元方法建立模型有限元方法是建立柔性多体动力学模型的常用方法,它通过将柔性体划分为有限个单元,利用单元间的相对位移和应变关系,求解节点的位移和形变。
通过有限元方法建立的模型,能够在较高的精度下反应系统的运动和变形情况。
四、柔性多体动力学模型的仿真分析1. 动力学仿真通过动力学仿真,可以模拟柔性多体系统受到外力作用下的运动行为。
多柔体系统动力学理论概述考虑部件柔性效应的多体系统称为多柔体系统。
多柔体系统动力学主要研究部件的大范围刚体运动和部件本身的弹性形变互相耦合作用下的系统动力学响应。
它是多刚体系统动力学的自然发展,同时也是多学科交叉发展而产生的新学科。
多柔体系统动力学在某种特定假设下可以退化为多刚体系统动力学和结构动力学问题,但其本质是一个高度非线性的耦合复杂问题。
对于多柔体系统动力学建模方法和数值求解的研究,目前已取得了不少成果。
其主要思想是基于多刚体系统动力学,对柔性结构变形进行描述,通常使用有限段方法和模态综合法,在对位形的描述上又分为相对坐标方法和绝对坐标方法。
有限段方法仅适用于细长结构体,其本质是用柔性梁描述结构体的柔性效应,即将柔性结构体离散成有限段梁,每段梁之间用扭簧、线弹簧和阻尼器连接,建立梁段间相对角速率和体间相对(角)速度的广义速率的动力学方程。
模态综合法适合小变形大规模多体系统分析,其将柔性结构体等效成有限元模型节点的集合,将柔性结构体变形处理成模态振型的线性叠加。
同时,每个节点的线性局部运动近似看为振型和振型向量的线性叠加。
一、柔性体运动学描述假设某柔性体如图1所示,在柔性体上建立随体坐标系Oxyz。
图1 柔性体上节点P的位置则在全局坐标系中表示节点P的矢径的列阵为式中,u′o为物体变形时P点相对于o点位矢动坐标的列阵,为常数列阵;u′f为P点相对位移矢量在动坐标系中的列阵。
应用模态综合法,u′f可以表示为式中,Φ=[Φ1Φ2…ΦN]为模态向量矩阵;q f=[q f1q f2…q fN]为模态坐标。
将其代入可得对式(1.31)求一阶导数和二阶导数,得到P的速度和加速度表达式:二、多柔体系统的动力学方程本小节使用第一类Lagrange方程建立多柔体系统的动力学方程。
1.柔性体的动能柔性体的动能用广义速度表达为式中,ρ和V分别为柔性体密度还有体积;为柔性体上一点的绝对速度;为广义速度;M为质量(mass)矩阵,可以写成分块形式:2.柔性体的弹性势能柔性体的弹性势能可以由模态刚度矩阵表示:3.阻尼力阻尼力的大小和广义速度相关,通过损耗函数对广义速度的偏导数得到。
变速箱齿轮拍击柔体动力学分析与优化为探究变速箱内齿轮在空载时的拍击历程,从而降低齿轮的拍击噪声,优化整车的NVH。
根据实际工况,在ADAMS软件中,建立变速箱齿轮的柔体动力学拍击模型,完成了发动机扭振与负载的模拟,通过对模型进行仿真,分析主从动齿轮在稳态时的角速度以及啮合力关系。
分析了齿轮在受到发动机扭振激励下的拍击过程。
通过频域分析可知,齿轮产生拍击是由于发动机的扭振频率及其倍频所产生。
对齿轮的转动惯量进行优化,同时优化齿轮的角加速度激励,降低了齿轮的拍击力,减小了拍击噪声。
标签:齿轮;柔体;ADAMS;动力学;拍击随着汽车工业的发展,对整车NVH的要求也日渐提高,由发动机扭振而产生的变速箱齿轮空载拍击噪声也愈发受到关注。
由于齿轮传动涉及到啮合刚度,齿侧间隙等多重非线性问题,难以利用公式进行准确表达。
本文利用ADAMS 建立变速箱齿轮系统的柔体动力学模型,模拟齿轮在受到发动机扭振激励下的拍击过程,在时域和频域下分析拍击形成的原因,并通过优化,提出降低齿轮拍击噪声的方法[1-2]。
1 齿轮拍击动力学模型的建立1.1 齿轮柔体模型的建立在ANSYS软件中根据模态叠加原理,建立某型号变速箱四挡齿轮的模态中性文件,具体的齿轮技术参数如表1所示,材料参数如表2所示。
在ADAMS中,建立该齿轮的柔体动力学模型如图1所示。
在齿轮体心刚性节点位置处设置旋转副;同时在齿轮间添加了柔体接触。
1.2 发动机扭振与负载的模拟变速箱内齿轮空载时产生拍击主要是由于发动机的扭振造成的[3]。
四缸发动机的转矩波动一般为输出转矩的十分之一左右,通过扭转减震器、飞轮、离合器,转速波动通常控制在转速的2%~5%。
在ADAMS中,首先模拟加速工况,设定为发动机在2秒内转速从1500上升到2000的工况。
添加转速驱动函数:4*step(time,0,1,2,1.33)*sin(step (time,0,18000d,2,24000d)*time)+step(time,0,9000d,2,12000d)。
柔体动力学介绍一、KED (Kineto-Elastodynamics )法KED 法,即运动弹性动力学,由美国学者Erdman 和Sandor 提出。
该方法的研究始于上个世纪60年代,早期研究者仅把部件(一般是一个,如四杆机构的连杆)看作是柔性的,并且只考虑其一种变形(如杆件的弯曲变形),方程中也引入较多假设。
70年代初期,Erdman 和Sandor 将结构动力学中的有限元方法移植到机构分析中来,克服了模型过于简单的缺陷。
我国自80年代初开始研究机构弹性力学,学者张策对KED 法做了大量研究。
KED 法在分析机构的真实运动时,均假设:与采用刚性机构的运动分析法的到的机构名义运动的位移相比,由构件变形引起的弹性位移很小;这种弹性位移不会影响机构的名义运动。
依据上述假设,机构真实运动的位移可以看作是名义运动的位移和弹性位移的叠加。
名义运动可以用刚体机构运动和动力学分析方法求出,弹性位移则用弹性动力学分析方法求出。
为了使所建模型较准确反应原机构系统的特性,现在普遍采用“子结构分析方法”,即把系统按结构划分为子结构单元,然后建立单元和子结构的运动方程,最后将单元和子结构的运动方程组合成系统的运动方程。
对于连续体的离散,有1)集中参数模型2)有限元模型两种建模方法。
以一个简单例子为例: 一般弹性动力学方程为:()()()()+=++=+-rr r rf f e v r rff f ff f e v fr rf f M y M y q q M y K y q q M y其中,第一个方程描述的是机构的刚体动力学方程,第二个方程描述的是机构的结构振动方程。
r y 表示机构广义刚体位移,f y 表示机构广义弹性位移,e q 表示机构所受外力,v q 表示机构的科氏力和离心力。
对于KED 方法,变形对刚体运动的影响忽略不计,因此,忽略耦合项,上述方程变为:()()()=+=+-rr r e rff f ff f e v fr rf f M y q M y K y q q M y从上式可以看出,由于KED 方法的假设,使方程得到很大的化简,提高了计算效率,此方法对于作大范围刚体运动,机构刚度大(即弹性变形小的系统)适用。
但随着轻质、高速运动、大尺寸机构的发展,KED 方法计算结果的精确度不再令人满意。
在这些系统中,刚体运动和弹性变形的惯性耦合非常重要,在动力学分析中不能被忽略,因此,KED 方法在这些机构的动力学分析中不再适用。
二、浮动坐标法(Floating Frame of Reference )浮动坐标法是目前进行计算机柔体动力学仿真时最广泛运用的方法,这种方法已经被应用在几种商用动力学分析软件中。
在浮动坐标法中,共使用两种坐标系来描述变形体的构型,一种是用来描述变形体连体坐标系的位置和方向,另一种是用来描述变形体相对于其连体坐标系的变形。
如下图所示:图一1)运动分析变形体上任意一点P 在全局坐标系123X X X 中的位置为:()=++0f r R A u u(1.1)其中,A 为连体坐标系123'''X X X 相对于全局坐标系123X X X 的方向余弦矩阵。
0u 为点P 在未变形时在连体坐标系中的位置,f u 为变形位移。
对于一个具体问题,如何选择合适的连体坐标系是难点。
在多刚体动力学中,选取通过质心的主轴坐标系为跟随坐标系而使动力学方程中平移与转动惯性解耦。
柔体中各质点的位置时刻都在变换,其质心相对于其内部的质点也一直在不停地变化,因而不存在一个固定的连体坐标系,选取不同的连体坐标意味着选取了不同的柔性体变形。
但研究表明这并不影响最终的位移分析结构。
系统广义坐标为[]=Tf q R θq 。
其中,R 为描述变形体相对位置的笛卡尔坐标,θ为描述变形体方向的角度坐标,f q 为变形体上任意点变形坐标,与变形位移的关系为=ff u Sq ,其中S 为型函数。
之后便可以对系统进行运动学分析,对公式(1.3)求一次导数,便可得到任一点P 的运动速度:[]=++=++=++⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦p f f f fff r R Au Au R Au ASq R B θASq R I B AS θLqq (1.2)其中,1()()n θθ⎡⎤∂∂=⎢⎥∂∂⎣⎦B Au Au ,q 为系统广义速度阵,L 为系数矩阵。
对1.4再求一次导数,可得到点P 的运动加速度:=p r Lq +Lq(1.3)2)质量矩阵: (1)系统的动能为:111222V V T dV dV ρρ===⎰⎰T T TT r r q L Lq q Mq(1.4)(2)系统质量阵为12VdV ρ=⎰TM L L (1.5)M 是一个非线性的对称矩阵。
变系数,随位形变化3)系统广义力利用虚功原理,求解弹性力和外力所产生的关于广义坐标q 的广义力 (1) 系统广义弹性力[]s W δδδδ⎡⎤⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦f ff f 000R R θq 000θ00K q(1.6)(2) 系统广义外力e W δδδδ⎡⎤⎢⎥⎡⎤=-⎣⎦⎢⎥⎢⎥⎣⎦T TT Rθf f R Q Q q θq (1.7)其中,T R Q 和TθQ 为关于移动和转动坐标的广义力。
4)运动约束方程图二系统的约束方程可写为向量的形式:(,)t =C q 0 (1.10)其中,TTT 12T[]n =q qqq 为系统的广义坐标,t为时间,T 12[]n C C C =C 为独立的约束方程。
例如,如图二所示,如果点iP 和点jP 相连,则有()t =+-+=ij i i i j j j r R A u R A u f ()(1.8)当()t =f 0时,则表示两个点始终相连。
为了将约束方程(1.10)引入动力学方程中,对于广义坐标取微小变化δq ,公式(1.10)可写为:δδ⎡⎤⎡⎤=-=⎢⎥⎣⎦⎣⎦iijq j q C δq L L 0q(1.9)其中,⎡⎤=-⎣⎦ij qC L L 为系统约束压雅可比矩阵。
5)系统动力学方程将以上求解各式带入到第一类拉格朗日方程中,即可得到系统动力学方程++=+Tq e V Mq Kq C λQ Q(1.10)其中,λ为拉格朗日乘子。
从以上分析可以看出,在浮动坐标法中,质量矩阵为一个非线性的对称矩阵,刚度矩阵为一个常量矩阵。
计算广义力时,需考虑系统的科氏力和离心力。
浮动坐标法适用于作大范围移动小变形的系统,对于作大范围移动大变形的系统,此方法的求解不够精确,不再适用。
三、绝对节点坐标法(Absolute Nodal Coordinate Formulation )该方法由Ahmed A.Shabana 于1996年提出,其理论基础主要是有限元与连续介质力学理论。
该方法中单元节点的坐标定义在全局坐标系下,采用斜率矢量代替传统有限单元中的节点转角坐标。
推导的动力学方程具有常质量矩阵、不存在科氏力和离心力等项的特点。
这些特点可以提高计算效率。
绝对节点坐标法已被认为是多体系统动力学研究历史上的一个重要进展之一,它的诞生使柔性多体系统动力学理论与有限元理论进一步整合。
绝对节点坐标法自出现以来,一直是多体系统动力学研究者关注的热点问题之一。
以一个二维单元梁为例:1)运动分析梁上任意一点在全局坐标系下的位置为=r Se(1.11)其中S 为型函数,e 为节点坐标,且有[]1234S S S S =S I I I I 231132S ξξ=-+,()2322S l ξξξ=-+,23332S ξξ=-,()324S l ξξ=-,xlξ=。
1001⎡⎤=⎢⎥⎣⎦I[]1234567812121212TTi i k k i i k k e e e e e e e e r r r r r r r r xxxx =∂∂∂∂⎡⎤=⎢⎥∂∂∂∂⎣⎦e由节点坐标的选取可得出,绝对节点坐标法中并未使用转角作为坐标,而是选取斜率作为广义坐标。
型函数S 中,x 为任意点在未变形时梁中的位置坐标,l 为单元梁的长度,由此可看出,型函数仅是原始坐标x 的函数,与时间无关。
而节点坐标e 则是原始坐标e 和时间t 的函数(),x t =e e。
对公式1.13求一次导,便可得到任意一点速度: =r Se(1.12)2)质量矩阵(1) 系统的动能为:111222V V T dV dV ρρ===⎰⎰T T TT r r e S Se e Me(1.13)(2) 系统质量矩阵VdV ρ=⎰T M S S(1.14)由上文可知,型函数S 仅为x 的函数,因此,质量矩阵M 为一个常量矩阵,在进行动力学分析的时候,可事先计算好质量矩阵,节省了计算时间。
3)系统广义力(1)利用介质力学中变形梯度,来求解弹性力。
单元变形梯度为:∂=∂rJ x(1.15)利用拉格朗日应变张量描述系统应变,此张量为单元变形梯度的函数,表达式为:()111221⎡⎤-=-=⎢⎥-⎣⎦T TT a c a T Tc b e S e e S e εJ J I e S e e S e (1.16)其中,=+T T a 1x 1x 2x 2xS S S S S ,=+TT b 1y 1y 2y 2yS S S S S ,=+TT c 1x 1y 2x 2y S S S S S 。
式中,ix i x =∂∂S S ,iy i y =∂∂S S ,i S 表示单元形函数的第i 行。
a ε为一个对称张量,因此可以写为:[]123Tεεεε=利用材料本构模型,则系统应力张量为:σε=E (1.19)其中,E 为关于材料样式模量的矩阵,若用拉梅常数表达,为:2020002λμλλλμμ+⎡⎤⎢⎥=+⎢⎥⎢⎥⎣⎦E (1.19) 杆件的弹性应变能为:12VdV =⎰TU εE ε(1.17)弹性力为:T ∂==∂e U q e K e(1.18)其中,K 为系统刚度矩阵,可以写为:()()12322λμλμ=+++K e K K K (1.19)其中,()()()()()()1112111214b b a Vb b a VT c V dV dV dV ⎧⎡⎤=-+-⎪⎣⎦⎪⎪⎪⎡⎤=-+-⎨⎣⎦⎪⎪⎡⎤=+⎪⎣⎦⎪⎩⎰⎰⎰T T1a T T2a T3c c K S e S e S e S e K S e S e S e S e K S S e S e(2)由虚功原理,求解广义外力W S δδδδ===T T T f F r F e q e(1.19)因此广义外力为:S =T T f q F(1.20)4)动力学方程将上式带入牛顿欧拉方程,得系统动力学方程为:=+f e Me q q(1.21)从上述推导过程中可以看出,绝对节点坐标法的动力学方程中,质量矩阵为一个常量矩阵,而刚度矩阵则为一个非线性的非常量矩阵,这一点正好与浮动坐标法相反。