ANSYS中阻尼的定义和使用方式
- 格式:docx
- 大小:769.96 KB
- 文档页数:11
【拉布索思】谐响应中阻尼的设置及其工程应用讨论背景这里主要讨论的是ANSYS(Workbench)中模态叠加法(包括瞬态中用模态叠加)的阻尼比(包括α、β阻尼)设置问题,不考虑材料的阻尼比。
各阻尼比的解释这里会把阻尼都写成阻尼比的形式,因为阻尼比最直观,也可以在实验中得到。
那么,总阻尼比为:其中,是常值阻尼比,是作用于所有阶的模态,而且值是恒定的,在Constant Damping Ratio 设置;是第i阶模态的阻尼比,用来设定某些阶的阻尼比,要通过命令MDAMP设置(命令解释请看help,命令使用实例请看下面例子);,这是β阻尼相应的阻尼比,也是作用于所有阶的模态,但值随频率增大而线性增大。
HELP中说,在很多实际结构问题中,α会被忽略,所以上式中就没有α只有β,我是这么猜的,因为通常实际问题的频率都在几十到几千赫兹不等,那么就比较小,可以忽略。
反正,在Workbench界面中是没有α的设置项的,默认α=0,要设的话就要加命令,这里也不讨论α了。
那么β值就决定了这个阻尼比,而因为β值是恒定的,所以这个阻尼比会随频率增大而线性增大,就能起到抑制高频的作用。
AWB中有两种输入β阻尼的方法,一是直接输入β值(Direct Input),二是输入某个频率下的阻尼比(Dampingvs Frequency),系统就会根据来计算出β值,界面中的Beta Damping Measure就是。
通过两种输入方法设置了β值后,系统就会自动求出各阶的β阻尼比,个人喜欢用第二种方法,因为设置阻尼比更直观,结合使用另外两个阻尼比时会更方便;注意,三个阻尼比的效果是叠加的。
为什么要设置阻尼?首先,加阻尼对共振频率的影响很小,比如是固有频率乘以,所以阻尼对共振频率的影响可以忽略。
那我认为,阻尼的主要作用是压低共振处的幅值,使频响曲线变得更平缓。
而实际结构中一定有阻尼,所以分析中适当设置一定的阻尼会比较接近实际。
如果阻尼都取为0(默认值)的话,频呼曲线的峰值会相当大,理论上是无穷大的。
zt ansys ls-dyna 显式与隐式方法对比显式与隐式方法对比:隐式时间积分——不考虑惯性效应([C]and[M])。
——在t+△t时计算位移和平均加速度:{u}={F}/[K]。
——线性问题时,无条件稳定,可以用大的时间步。
——非线性问题时,通过一系列线性逼近(Newton-Raphson)来求解;要求转置非线性刚度矩阵[k];收敛时候需要小的时间步;对于高度非线性问题无法保证收敛。
显式时间积分——用中心差法在时间t求加速度:{a}=([F(ext)]-[F(int)])/[M]。
——速度与位移由:{v}={v0}+{a}t,{u}={u0}+{v}t——新的几何构型由初始构型加上{X}={X0}+{U}——非线性问题时,块质量矩阵需要简单的转置;方程非耦合,可以直接求解;无须转置刚度矩阵,所有的非线性问题(包括接触)都包含在内力矢量中;内力计算是主要的计算部分;无效收敛检查;保存稳定状态需要小的时间步。
关于文件组织:jobname.k——lsdyna输入流文件,包括所有的几何,载荷和材料数据jobname.rst——后处理文件主要用于图形后处理(post1),它包含在相对少的时间步处的结果。
jobname.his——在post26中使用显示时间历程结果,它包含模型中部分与单元集合的结果数据。
时间历程ASCII文件——包含显式分析额外信息,在求解之前需要用户指定要输出的文件,它包括:GLSTAT全局信息,MATSUM材料能量,SPCFORC节点约束反作用力,RCFORC接触面反作用力,RBDOUT刚体数据,NODOUT 节点数据,ELOUT单元数据……在显式动力分析中还可以生成下列文件:D3PLOT——类似ansys中jobname.rstD3THDT——时间历程文件,类似ansys中jobname.his关于单元:ANSYS/LSDYNA有7中单元(所有单元均为三维单元):LINK160:显式杆单元;BEAM161:显式梁单元;SHELL163:显式薄壳单元;SOLID164:显式块单元;COMBI165:显式弹簧与阻尼单元;MASS166:显式结构质量;LINK167:显式缆单元显式单元与ansys隐式单元不同:——每种单元可以用于几乎所有的材料模型。
如前所述,在做 Full积分法的瞬态分析时,用阻尼比定义的阻尼都被 ANSYS 程序忽略掉了,所以同一个模型采用 full 法和模态叠加法的瞬态分析,ANSYS 计算采用的阻尼可能不一样,造成结果也有差别。
以下是结构分析中 ANSYS 常用的几种阻尼输入的命令流演示。
1)用 MP,damp 来输入粘滞阻尼DAMPRATO = 0.025 ! 已知粘滞阻尼的阻尼比LOSSMODM = 2*DAMPRATO ! 粘滞阻尼的阻尼比乘以2 是等价的材料阻尼系数(日本规范的“减衰系数”)CRITFREQ = 2.6 ! 此为粘性阻尼等效为材料阻尼时的换算频率MP_BETAD = DAMPRATO/(acos(-1)*CRITFREQ) ! 粘滞阻尼与频率有关/prep7mp,damp,1,MP_BETAD !定义viscous damping,与频率有关/soluantype,modalmodopt,lanb,1! 要使模态计算考虑阻尼的影响,必须用材料阻尼,材料阻尼必须在求解前指定! mxpand,,,,yes, 选项!阻尼比输入只在对求出的振型求反应再叠加中有用,! ansys 不会把阻尼比还原计算为阻尼阵 [C] 的mxpand,1,,,yes,,,Solve2)用 MP,Damp 输入材料阻尼DAMPRATO=0.025LOSSMODM=2*DAMPRATO ! 材料阻尼系数,书上给的一般是LOSSMODM/prep7mp,damp,1,DAMPRATO !常数,如果已知的是材料阻尼系数LOSSMODM,就要除以2 /soluantype,modal ! 使用模态叠加法modopt,lanb,1! importantmxpand,1,,,yes,,,,Solve3)用 BETAD 输入粘滞阻尼(振型叠加法)! MSUP method with BETAD! BETAD is damping_ratio/pi*f, even for MSUPDAMPRATO=0.025 ! 阻尼比LOSSMODM=2*DAMPRATO !等效的材料阻尼系数/prep7! mp,damp,1,DAMPRATOBETAD,DAMPRATO/(acos(-1)*442) ! 注意此公式! 442 是你给定的频率值/soluantype,modal !模态分析modopt,lanb,1! importantmxpand,1,,,yeslumpm,on,,,,solve/soluantype,harmic !谐分析hropt, msuphrout, on, offharfrq, FREQBEGN, FREQENDG,,,solve4)使用 DMPRAT 定义的整体结构的常数阻尼比(模态叠加法)! MSUP method with DMPRAT! shows that DMPRAT is damping ratioDAMPRATO=0.025 !全结构阻尼比是0.025LOSSMODM=2*DAMPRATO/prep7!mp,damp,1,DAMPRATO/soluantype,modal ! 先做无阻尼振型分解solve/soluantype,harmichropt,msuphrout,on,offharfrq,FREQBEGN,FREQENDGnsubst,NUM_STEPkbc,1dmprat,DAMPRATO ! 在这里定义此阻尼比,常数,,,,,,solve5)用 MP,DAMP 定义粘性阻尼做 FULL 瞬态分析! 粘性阻尼随频率增加而增加,高频衰减快! Full method with MP,DAMP! shows that MP,DAMP with FULL is damping_ratio/pi*f! As freq increases, damping is hugeDAMPRATO=0.025LOSSMODM=2*DAMPRATOCRITFREQ=480MP_BETAD=DAMPRATO/(acos(-1)*CRITFREQ) ! 注意此公式/prep7mp,damp,1,MP_BETAD6)用 DMPRAT 定义全结构常数阻尼比! Full method with DMPRATDAMPRATO=0.025LOSSMODM=2*DAMPRATOCRITFREQ=480MP_BETAD=DAMPRATO/(acos(-1)*CRITFREQ)/prep7et,1,1! mp,damp,1,MP_BETAD ! 如果用材料阻尼形式输入,就这样输入dmprat,DAMPRATO !常数阻尼比/soluantype,modal !带阻尼的振型分解modopt,lanb,3! importantmxpand,3,,,yeslumpm,on,,,solve/soluantype,harmichropt,full ! full harmonic analysis6.单元阻尼许多单元具有单元阻尼,单元阻尼都是在相关单元数据中输入。
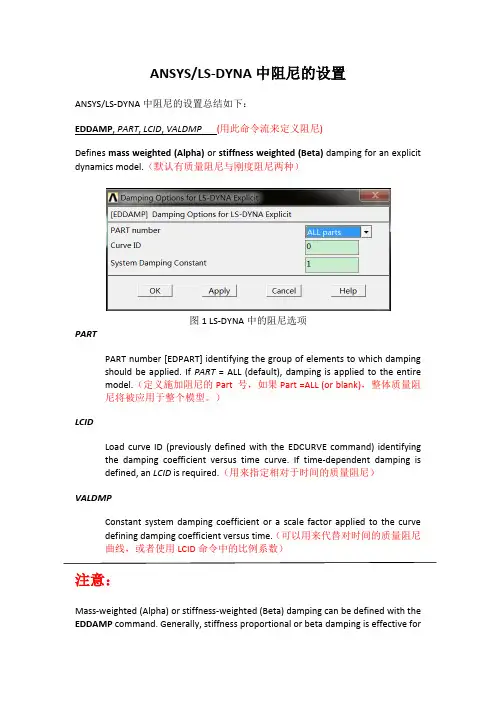
ANSYS/LS-DYNA中阻尼的设置ANSYS/LS-DYNA中阻尼的设置总结如下:EDDAMP, PART, LCID, VALDMP (用此命令流来定义阻尼)Defines mass weighted (Alpha) or stiffness weighted (Beta) damping for an explicit dynamics model.(默认有质量阻尼与刚度阻尼两种)图1 LS-DYNA中的阻尼选项PARTPART number [EDPART] identifying the group of elements to which damping should be applied. If PART = ALL (default), damping is applied to the entire model.(定义施加阻尼的Part 号,如果Part =ALL (or blank),整体质量阻尼将被应用于整个模型。
)LCIDLoad curve ID (previously defined with the EDCURVE command) identifying the damping coefficient versus time curve. If time-dependent damping is defined, an LCID is required.(用来指定相对于时间的质量阻尼)VALDMPConstant system damping coefficient or a scale factor applied to the curve defining damping coefficient versus time.(可以用来代替对时间的质量阻尼曲线,或者使用LCID命令中的比例系数)注意:Mass-weighted (Alpha) or stiffness-weighted (Beta) damping can be defined with the EDDAMP command. Generally, stiffness proportional or beta damping is effective foroscillatory motion at high frequencies. This type of damping is orthogonal to rigid body motion and so will not damp out rigid body motion. On the other hand, mass proportional or alpha damping is more effective for low frequencies and will damp out rigid body motion. The different possibilities are described below:1.Global DampingMass-weighted or Alpha damping (质量阻尼)When PART = (blank) or ALL (default), mass-weighted global damping can be defined in the following 2 ways. In this case, the same damping is applied for the entire structure.1.When the damping coefficient versus time curve (LCID) is specified usingthe EDCURVE command, VALDMP is ignored by LS-DYNA (although it iswritten in the LS-DYNA input file Jobname.K). The damping force appliedto each node in the model is given by f d= d(t)mv, where d(t) is thedamping coefficient as a function of time defined by the EDCURVEcommand, m is the mass, and v is the velocity.2.When the LCID is 0 or blank (default), a constant mass-weighted systemdamping coefficient can be specified using VALDMP.The constant and time-dependent damping, described above, cannot be defined simultaneously. The last defined global damping will overwrite any previously defined global damping.2.Damping defined for a PART(1)Mass-weighted or Alpha damping (质量阻尼)When both a valid PART number is specified and the damping coefficient versus time curve (LCID) is specified using the EDCURVE command, mass-weighted time-dependent damping will be defined for the particular PART. In this case, VALDMP will act as a scaling factor for the damping versus time curve (if VALDMP is not specified, it will default to 1). A valid PART number must be specified to define this type of damping. For example, use PART=1 (and not blank) when the entire model consists of only one PART. Issue the command repeatedly with different PART numbers in order to specify alpha damping for different PARTS.(2)Stiffness-weighted or Beta damping (刚度阻尼)When a valid PART number is specified with LCID= 0 or (blank) (default), a stiffness-weighted (Beta) constant damping coefficient for this particular PART canbe defined by VALDMP. The stiffness-weighted value corresponds to the percentage of damping in the high frequency domain. For example, 0.1 roughly corresponds to 10% damping in the high frequency domain. Recommended values range from 0.01 to 0.25. Values lower than 0.01 may have little effect. If a value larger than 0.25 is used, it may be necessary to lower the time step size significantly. Issue the command repeatedly with different PART numbers in order to specify beta damping for different PARTS. Time-dependent stiffness-weighted damping is not available in ANSYS LS-DYNA.The mass-weighted and stiffness-weighted damping, described above, cannot be defined simultaneously for a particular PART number. The last defined damping for the particular PART number will overwrite any previously defined mass-weighted or stiffness-weighted damping for this PART.In order to define the mass-weighted and stiffness-weighted damping simultaneously, you can use the MP,DAMP command to define stiffness-weighted (Beta) constant damping coefficient. However, do not use both of these commands together to define stiffness-weighted (Beta) constant damping coefficient for a particular PART. If you do, duplicate stiffness-weighted (Beta) constant damping coefficients for this PART will be written to the LS-DYNA input file Jobname.K. The last defined value will be used by LS-DYNA. Also, note that the MP,DAMP command is applied on the MAT number, and not on the PART number. Since a group of elements having the same MAT ID may belong to more than one PART (the opposite is not true), you need to issue the MP,DAMP command only once for this MAT ID and the stiffness-weighted (Beta) damping coefficients will be automatically defined for all the PART s with that MAT ID.Mass-weighted and stiffness-weighted damping can be defined simultaneously using the EDDAMP command only when mass-weighted damping (constant or time-dependent) is defined as global damping (EDDAMP, ALL, LCID, VALDMP) and stiffness-weighted damping is defined for all necessary PARTs (EDDAMP,PART, ,VALDMP).To remove defined global damping, reissue the EDDAMP, ALL command with LCID and VALDMP set to 0. To remove damping defined for a particular PART, reissue EDDAMP, PART, where PART is the PART number, with LCID and VALDMP set to 0. There is no default for the EDDAMP command, i.e., issuing the EDDAMP command with PART = LCID = VALDMP = 0 will result in an error. Stiffness-weighted damping defined by the MP,DAMP command can be deleted using MPDELE, DAMP, MAT.In an explicit dynamic small restart (EDSTART,2) or full restart analysis (EDSTART,3), you can only specify global alpha damping. This damping will overwrite any alpha damping input in the original analysis. If you do not input global alpha damping in the restart, the damping properties input in the original analysis will carry over to the restart.Damping specified by the EDDAMP command can be listed, along with other explicit dynamics specifications, by typing the command string EDSOLV$STAT into the ANSYS input window. Beta damping specified by the MP,DAMP command can be listed by MPLIST, MAT command.Menu PathsMain Menu>Preprocessor>Loads>Load Step Opts>Other>Change MatProps>DampingMain Menu>Preprocessor>Material Props>DampingMain Menu>Solution>Load Step Opts>Other>Change Mat Props>DampingK文件,Eg.1 $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ $ SYSTEM DAMPING $ $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ $*DAMPING_PART_STIFFNESS2 1.000$K文件,Eg.2 $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ $ SYSTEM DAMPING $ $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ $*DAMPING_GLOBAL00.5000E+02$。
显式与隐式方法对比:隐式时间积分——不考虑惯性效应([C]and[M])。
——在t+△t时计算位移和平均加速度:{u}={F}/[K]。
——线性问题时,无条件稳定,可以用大的时间步。
——非线性问题时,通过一系列线性逼近(Newton-Raphson)来求解;要求转置非线性刚度矩阵[k];收敛时候需要小的时间步;对于高度非线性问题无法保证收敛。
显式时间积分——用中心差法在时间t求加速度:{a}=([F(ext)]-[F(int)])/[M]。
——速度与位移由:{v}={v0}+{a}t,{u}={u0}+{v}t——新的几何构型由初始构型加上{X}={X0}+{U}——非线性问题时,块质量矩阵需要简单的转置;方程非耦合,可以直接求解;无须转置刚度矩阵,所有的非线性问题(包括接触)都包含在内力矢量中;内力计算是主要的计算部分;无效收敛检查;保存稳定状态需要小的时间步。
关于文件组织:jobname.k——lsdyna输入流文件,包括所有的几何,载荷和材料数据jobname.rst——后处理文件主要用于图形后处理(post1),它包含在相对少的时间步处的结果。
jobname.his——在post26中使用显示时间历程结果,它包含模型中部分与单元集合的结果数据。
时间历程ASCII文件——包含显式分析额外信息,在求解之前需要用户指定要输出的文件,它包括:GLSTAT全局信息,MATSUM材料能量,SPCFORC节点约束反作用力,RCFORC接触面反作用力,RBDOUT刚体数据,NODOUT 节点数据,ELOUT单元数据……在显式动力分析中还可以生成下列文件:D3PLOT——类似ansys中jobname.rstD3THDT——时间历程文件,类似ansys中jobname.his关于单元:ANSYS/LSDYNA有7中单元(所有单元均为三维单元):LINK160:显式杆单元;BEAM161:显式梁单元;SHELL163:显式薄壳单元;SOLID164:显式块单元;COMBI165:显式弹簧与阻尼单元;MASS166:显式结构质量;LINK167:显式缆单元显式单元与ansys隐式单元不同:——每种单元可以用于几乎所有的材料模型。
ANSYS动力学分析指南——瞬态动力学分析§3.1瞬态动力学分析的定义瞬态动力学分析(亦称时间历程分析)是用于确定承受任意的随时间变化载荷结构的动力学响应的一种方法。
可以用瞬态动力学分析确定结构在稳态载荷、瞬态载荷和简谐载荷的随意组合作用下的随时间变化的位移、应变、应力及力。
载荷和时间的相关性使得惯性力和阻尼作用比较重要。
如果惯性力和阻尼作用不重要,就可以用静力学分析代替瞬态分析。
瞬态动力学的基本运动方程是:其中:[M] =质量矩阵[C] =阻尼矩阵[K] =刚度矩阵{}=节点加速度向量{}=节点速度向量{u} =节点位移向量在任意给定的时间,这些方程可看作是一系列考虑了惯性力([M]{})和阻尼力([C]{})的静力学平衡方程。
ANSYS程序使用Newmark时间积分方法在离散的时间点上求解这些方程。
两个连续时间点间的时间增量称为积分时间步长(integration time step)。
§3.2学习瞬态动力学的预备工作瞬态动力学分析比静力学分析更复杂,因为按“工程”时间计算,瞬态动力学分析通常要占用更多的计算机资源和更多的人力。
可以先做一些预备工作以理解问题的物理意义,从而节省大量资源。
例如,可以做以下预备工作:1.首先分析一个较简单模型。
创建梁、质量体和弹簧组成的模型,以最小的代价深入的理解动力学认识,简单模型更有利于全面了解所有的动力学响应所需要的。
2.如果分析包括非线性特性,建议首先利用静力学分析掌握非线性特性对结构响应的影响规律。
在某些场合,动力学分析中是没必要包括非线性特性的。
3.掌握结构动力学特性。
通过做模态分析计算结构的固有频率和振型,了解这些模态被激活时结构的响应状态。
同时,固有频率对计算正确的积分时间步长十分有用。
4.对于非线性问题,考虑将模型的线性部分子结构化以降低分析代价。
<<高级技术分指南>>中将讲述子结构。
§3.3三种求解方法瞬态动力学分析可采用三种方法:完全(Full)法、缩减(Reduced)法及模态叠加法。
ANSYS结构分析基础篇一、总体介绍进行有限元分析的基本流程:1.分析前的思考1)采用哪种分析(静态,模态,动态...)2)模型是零件还是装配件(零件可以form a part形成装配件,有时为了划分六面体网格采用零件,但零件间需定义bond接触)3)单元类型选择(线单元,面单元还是实体单元)4)是否可以简化模型(如镜像对称,轴对称)2.预处理1)建立模型2)定义材料3)划分网格4)施加载荷及边界条件3.求解4.后处理1)查看结果(位移,应力,应变,支反力)2)根据标准规范评估结构的可靠性3)优化结构设计高阶篇:一、结构的离散化将结构或弹性体人为地划分成由有限个单元,并通过有限个节点相互连接的离散系统。
这一步要解决以下几个方面的问题:1、选择一个适当的参考系,既要考虑到工程设计习惯,又要照顾到建立模型的方便。
2、根据结构的特点,选择不同类型的单元。
对复合结构可能同时用到多种类型的单元,此时还需要考虑不同类型单元的连接处理等问题。
3、根据计算分析的精度、周期及费用等方面的要求,合理确定单元的尺寸和阶次。
4、根据工程需要,确定分析类型和计算工况。
要考虑参数区间及确定最危险工况等问题。
5、根据结构的实际支撑情况及受载状态,确定各工况的边界约束和有效计算载荷。
二、选择位移插值函数1、位移插值函数的要求在有限元法中通常选择多项式函数作为单元位移插值函数,并利用节点处的位移连续性条件,将位移插值函数整理成以下形函数矩阵与单元节点位移向量的乘积形式。
位移插值函数需要满足相容(协调)条件,采用多项式形式的位移插值函数,这一条件始终可以满足。
但近年来有人提出了一些新的位移插值函数,如:三角函数、样条函数及双曲函数等,此时需要检查是否满足相容条件。
2、位移插值函数的收敛性(完备性)要求:1)位移插值函数必须包含常应变状态。
2)位移插值函数必须包含刚体位移。
3、复杂单元形函数的构造对于高阶复杂单元,利用节点处的位移连续性条件求解形函数,实际上是不可行的。
ANSYS动力分析中的阻尼问题结构导则5. 瞬态动力学分析5.9. 瞬态动力学分析5.9.3. 阻尼在诸多体系中,存在阻尼,且在动力分析中必须定义阻尼。
在ANSYS program 中,存在以下不同形式的阻尼:•瑞利阻尼•材料阻尼•材料常数阻尼系数•常数阻尼比•模态阻尼•单元阻尼在ANSYS Professional program中,仅有常数阻尼比和模态阻尼比可用。
在一个模型中,可定义多种阻尼,将不同形式的阻尼集成后,ANSYS软件会形成阻尼矩阵(C)。
材料常数阻尼系数仅可应用于完全谐响应分析和模态谐响应分析。
表5.5为“结构动力分析中的阻尼”,阐述了在不同结构动力分析中可用的阻尼类型。
表5.5 结构动力分析中的阻尼N/A :不可用1.仅有β阻尼,无α阻尼。
2.此阻尼仅用于模态组合,但不用于计算模态系数。
3.包括超单元阻尼矩阵4.如果采用扩展模态,则转化为模态阻尼5.如果定义,则为谱分析确定一个有效阻尼比6.如果采用QR阻尼模态提取模态(MODOPT,QRDAMP),且在前处理或模态分析中定义了任意一种类型的阻尼,ANSYS软件均忽略振型叠加分析中的阻尼。
7.在振型叠加谐响应分析中,仅有QR阻尼法支持材料常数阻尼系数。
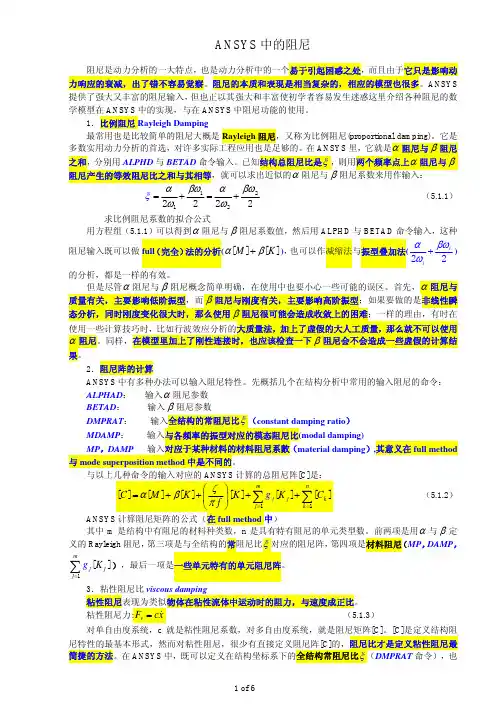
α阻尼和β阻尼用于定义瑞利阻尼中的常数α 和β。
阻尼矩阵(C)通过以下常数乘以质量矩阵(M)和刚度矩阵(K):(C) = α(M) + β(K)ALPHAD与BETAD命令用来定义α 和β。
一般α and β未知,但可以通过模态阻尼比ξi计算得到。
模态阻尼比ξi ξi = α/2ωi + βωi/2某个关心的或者重要的频率上的实际模态阻尼比。
如果模态i的圆频率ωi已知,则α 和β 满足下式:在诸多实际工程结构中,忽略α阻尼(或质量阻尼),即α = 0。
在此情况下,可通过ξi andωi计算β:β = 2ξi/ωi在一个荷载步中,只可输入一个β值,因此,应选择最关键的频率来计算β。
ANSYS学说模态提取方法在ANSYS 中有以下几种提取模态的方法:– (1) Block Lanczos 法– (2) 子空间法– (3) PowerDynamics 法– (4) 减缩法– (5) 不对称法– (6) 阻尼法使用何种模态提取方法主要取决于模型大小(相对于计算机的计算能力而言)和具体的应用场合。
(1) Block Lanczos 法Block Lanczos 法可以在大多数场合中使用:- 是一种功能强大的方法,当提取中型到大型模型(50,000 ~ 100,000 个自由度)的大量振型时(40+),这种方法很有效;- 经常应用在具有实体单元或壳单元的模型中;- 在具有或没有初始截断点时同样有效。
(允许提取高于某个给定频率的振型);- 可以很好地处理刚体振型;- 需要较高的内存。
(2) 子空间法子空间法比较适合于提取类似中型到大型模型的较少的振型(<40)- 需要相对较少的内存;- 实体单元和壳单元应当具有较好的单元形状,要对任何关于单元形状的警告信息予以注意;- 在具有刚体振型时可能会出现收敛问题;- 建议在具有约束方程时不要用此方法。
(3) PowerDynamics 法PowerDynamics 法适用于提取很大的模型(100.000个自由度以上)的较少振型(< 20)。
这种方法明显比Block Lanczos 法或子空间法快,但是:- 需要很大的内存;- 当单元形状不好或出现病态矩阵时,用这种方法可能不收敛;- 建议只将这种方法作为对大模型的一种备用方法。
注: PowerDynamics 方法- 子空间技术使用Power 求解器(PCG) 和一致质量矩阵;- 不执行Sturm 序列检查(对于遗漏模态); 它可能影响多个重复频率的模型;- 一个包含刚体模态的模型, 如果你使用PowerDynamics 方法,必须执行RIGID 命令(或者在分析设置对话框中指定RIGID 设置)。
Ansys中的阻尼ANSYS动力学分析中提供了各种的阻尼形式,这些阻尼在分析中是如何计算,并对分析有什么影响呢?本文将就此做一些说明何介绍.一.首先要清楚,在完全方法和模态叠加法中定义的阻尼是不同。
因为前者使用节点坐标,而后者使用总体坐标.1.在完全的模态分析、谐相应分析和瞬态分析中,振动方程为:阻尼矩阵为下面的各阻尼形式之和:α为常值质量阻尼(α阻尼)(ALPHAD命令)β为常值刚度阻尼(β阻尼)(BETA命令)ξ为常值阻尼比,f为当前的频率(DMPRAT命令)βj为第j种材料的常值刚度矩阵系数(MP,DAMP命令)[C]为单元阻尼矩阵(支持该形式阻尼的单元)where: [C] = structure damping matrixα = mass matrix multiplier (input on ALPHAD command)[M] = structure mass matrixβ = stiffness matri x multiplier (input on BETAD command)βc = variable stiffness matrix multiplier (see Equation 15–23)[K] = structure stiffness matrixNm = number of materials with DAMP or DMPR input= stiffness matrix multiplier for material j (input as DAMP on MP command)= constant (frequency-independent) stiffness matrix coefficient for material j (input as DMPR on MP command)Ω = circular excitation frequencyKj = portion of structure stiffness matrix based on material jNe = number of elements with specified dampingCk = element damping matrixCξ = frequency-dependent damping matrix (see Equation 15–21)2.对模态叠加方法进行的谐相应分析、瞬态分析何谱分析,动力学求解方程为:每个模态产生有效阻尼比ξid而不是创建阻尼矩阵α为常值质量阻尼β为常值刚度阻尼ξ为常值阻尼比ξmi为第i个模态的常值阻尼比ξj为第j个材料的阻尼系数Ejs为第j个材料的应变能,ANSYS由{f}T[K]{f}计算得到。
阻尼的问题wudingyi积分 49 帖子 37#12007-1-21 19:51我在论坛上看到可以用mp,damp 命令来输入材料的材料阻尼系数;但是在ansys 的帮助文件中是这样说明的: MP, Lab, MAT, C0, C1, C2, C3, C4 LabDAMP ― K matrix multiplier for damping.Note: If used in an explicit dynamic analysis, the value corresponds to the percentage of damping in the high frequency domain. For example, 0.1 roughly corresponds to 10% damping in the high frequency domain.DMPR ― Constant material damping coefficient .我对上面的理解是:输入材料的阻尼系数应该是用mp,dmpr 而mp,damp 到底输入的是什么,从上面我感觉和瑞利阻尼中的刚度阻尼系数重复,或者他是用来将材料阻尼系数等效为刚度阻尼系数来输入,如果是,该如何等效?请同行明示,谢谢!wms328积分 220 帖子 153#22007-1-23 20:21我也想问下阻尼的问题:一般做什么分析要考虑阻尼?是不是实际工程的计算分析都要考虑阻尼,从而在材料属性中输入阻尼系数! 希望有人能帮忙解开疑惑!谢谢mysuper积分 3 帖子 3#32007-1-24 12:38楼主说的材料属性中阻尼项我也很想知道在用combin14单元模拟阻尼单元时要求材料属性中mp,damp 一项不知道具体表示什么,在combin14单元实常数中定义了阻尼系数后,随意改变mp,damp 项似乎对结构的动力响应没有影响,不只是何原因wudingyi#42007-1-26 21:39你应该做的是完全瞬态分析,在ansys 中对其有两种阻尼输入模式,一积分 49 帖子 37 个是mp,damp 输入材料阻尼,另一个是单元阻尼,而对于其他一切的以阻尼比的形式输入的阻尼参数,程序一律忽略。
1.3.1.ANSYS动力学分析中的矩阵1.3.1.1.质量矩阵[M]动力学分析中需要质量矩阵[M]。
ANSYS有2种类型的质量矩阵:一致质量矩阵和集中质量矩阵。
一致(consistent)质量矩阵通过单元的形函数计算出来。
矩阵的对角线和非对角线上一般均有元素值。
一致质量矩阵是大多数单元的缺省选项。
集中(lumped)质量矩阵的质量被单元各节点平分,对角线上元素不为0,非对角线上元素均为0。
通过分析选项来激活,命令LUMPM,Key。
默认KEY=off,单元的一致质量矩阵,大多数单元的缺省选项。
KEY=on,使用集中质量矩阵。
其GUI为Main Menu>Solution>Analysis Type>Analysis Options。
一致质量矩阵对大多数分析来说,精度比集中质量矩阵高,但其计算时间较长。
若结构在一个方向的尺寸与另两个方向相比很小时,可采用简化质量矩阵(如果可能得到的话)或集中质量矩阵例如细长的梁或很薄的壳。
集中质量矩阵在大规模模型以及高速动力学如波传播问题上,具有较好的节省计算时间的优势。
1.3.1.2.阻尼矩阵[C]1.3.1.2.1.阻尼的分类阻尼的作用机制比较复杂。
大多简化处理。
阻尼的数值主要取决于材料、运动速度和振动频率。
阻尼可分类如下:粘性阻尼,滞后或固体阻尼,库仑或干摩擦阻尼。
一、粘性阻尼粘性阻尼一般物体在液体中运动时发生。
由于阻尼力与速度成正比,比例常数 c 称作阻尼常数。
通过规定阻尼比ξ,Rayleigh阻尼常数α(后面将进行讨论),或定义带有阻尼矩阵的单元,可将粘性阻尼纳入考虑。
通常用阻尼比ξ(阻尼常数 c 对临界阻尼常数cc*的比值)来量化表示粘性阻尼:ξ=c/cc。
其中粘性阻尼c,临界阻尼常数cc。
临界阻尼定义为出现振荡和非振荡行为之间的阻尼的极值, 此处阻尼比= 1。
对一个质量为m ,频率为w的单自由度弹簧质量系统,cc = 2mw 。
注意: 阻尼比ξ = 对于螺栓或铆钉链接结构常常为2%到15%二、滞后和固体阻尼滞后和固体阻尼是材料的固有特性,也称结构阻尼。
ANSYS的轴承座结构分析教程一、实体模型的建立建立实体模型可以通过自上而下和自下而上两个途径:1、自上而下建模,首先要建立体(或面),对这些体或面按一定规则组合得到最终需要的形状。
2、自下而上建模,首先要建立关键点,由这些点建立线、由线连成面等一般建模原则是充分利用对称性,合理考虑细节。
根据题中的轴承座,由于轴承座具有对称性,只需建立轴承座的半个实体对称模型,在进行镜像操作即可。
采用自下而上的建模方法得到如下图1所示的三维实体模型:(1)生成长方体Main Menu:Preprocessor>Modeling->Create>Volumes->Block>By Dimensions输入x1=0,x2=60,y1=0,y2=20,z1=0,z2=60平移并旋转工作平面Utility Menu>WorkPlane>Offset WP by IncrementsX,Y,Z Offsets 输入45,25,15 点击ApplyXY,YZ,ZX Angles输入0,-90,0点击OK。
创建圆柱体Main Menu:Preprocessor>Create>Cylinder> Solid CylinderRadius输入15/2, Depth输入-30,点击OK。
拷贝生成另一个圆柱体Main Menu:Preprocessor>Copy>Volume拾取圆柱体,点击Apply, DZ输入30然后点击OK从长方体中减去两个圆柱体Main Menu:Preprocessor>Operate>Subtract Volumes首先拾取被减的长方体,点击Apply,然后拾取减去的两个圆柱体,点击OK。
使工作平面与总体笛卡尔坐标系一致Utility Menu>WorkPlane>Align WP with> Global Cartesian(2)创建支撑部分Main Menu: Preprocessor -> -Modeling-Create -> -Volumes-Block -> By 2 corners & Z在创建实体块的参数表中输入下列数值:WP X = 0WP Y = 20Width = 30Height = 35Depth = 15OKToolbar: SAVE_DB(3)偏移工作平面到轴瓦支架的前表面Utility Menu: WorkPlane -> Offset WP to -> Keypoints +1. 在刚刚创建的实体块的左上角拾取关键点2. OKToolbar: SAVE_DB(4)创建轴瓦支架的上部Main Menu: Preprocessor -> Modeling-Create -> Volumes-Cylinder -> Partial Cylinder +1). 在创建圆柱的参数表中输入下列参数:WP X = 0WP Y = 0Rad-1 = 0Theta-1 = 0Rad-2 = 30Theta-2 = 90Depth = -15或者在by dimensions 下建立圆柱体,输入相应的参数,其余圆柱的创建方式相同。
ansys接触稳定阻尼因数Ansys接触稳定阻尼因数是指在分析和模拟中,使用Ansys软件时,为了保证计算结果的稳定性和精确性,引入的一种参数。
它在动态分析中起到了重要的作用,可以有效地控制模型的振动幅度和振动周期。
本文将对Ansys接触稳定阻尼因数进行详细介绍,并探讨其在工程实践中的应用。
我们需要了解什么是接触稳定阻尼。
在工程领域中,接触是一种常见的现象,比如机械零件之间的接触、结构与地基的接触等。
当两个物体之间存在接触时,由于摩擦力和接触面的变形等因素的影响,会导致振动的发生。
而接触稳定阻尼因数就是用来控制这种振动的参数。
Ansys软件是一款常用的工程仿真软件,可以对各种工程问题进行模拟和分析。
在进行动态分析时,如果不引入接触稳定阻尼因数,模型可能会出现不稳定的情况,振动幅度会越来越大,甚至无法得到合理的结果。
而引入接触稳定阻尼因数后,可以有效地控制振动幅度,使模型的振动趋于稳定。
那么,如何确定接触稳定阻尼因数呢?一般来说,这需要根据具体的工程问题和模型特点来确定。
在Ansys软件中,可以通过设置接触稳定阻尼因数的数值来控制模型的振动。
一般情况下,接触稳定阻尼因数的数值越大,模型的振动越稳定。
但是过大的数值也会导致计算时间增加,影响计算效率。
在实际工程中,接触稳定阻尼因数的选择需要考虑多个因素。
首先,需要分析模型的振动特性和振动频率。
不同的振动频率对应不同的接触稳定阻尼因数,需要根据实际情况进行调整。
其次,还需要考虑模型的材料特性和接触面的摩擦系数等因素。
这些因素都会对接触稳定阻尼因数的选择产生影响。
接触稳定阻尼因数的选择也需要结合实际的工程要求。
在某些情况下,为了保证模型的振动稳定性,可能需要增大接触稳定阻尼因数的数值。
而在另一些情况下,为了减小计算时间和提高计算效率,可能需要适当降低接触稳定阻尼因数的数值。
这需要工程师根据实际情况进行综合考虑,并进行优化设计。
Ansys接触稳定阻尼因数在工程实践中起到了重要的作用。
ansys接触原则:
ANSYS的接触原则主要包括以下几个方面:
1.接触类型选择:ANSYS提供了多种接触类型,如绑定(Bonded)、不分离(No
Separation)、无摩擦(Frictionless)和无穷粗糙(Rough)等。
选择合适的接触类型对于模拟结果的准确性和收敛性至关重要。
2.接触面和目标面选择:在定义接触时,需要选择接触面和目标面。
通常,接触面是
指与目标面接触的表面,而目标面则是与接触面相互作用的面。
确保选择的接触面和目标面匹配是获得准确结果的重要步骤。
3.接触刚度和阻尼:在ANSYS中,可以通过设置接触刚度和阻尼来模拟接触行为。
接
触刚度决定了接触面的刚性,而阻尼则用于控制能量的吸收和耗散。
选择合适的刚度和阻尼参数对于获得准确的模拟结果至关重要。
4.接触算法选择:ANSYS提供了多种接触算法,如罚函数法、拉格朗日乘子法和增广
拉格朗日法等。
选择合适的算法对于确保模拟结果的准确性和收敛性至关重要。
5.初始条件和边界条件:在定义接触时,需要考虑初始条件和边界条件。
初始条件是
指接触状态在开始时的状态,而边界条件则用于限制模拟的边界条件。
确保初始条件和边界条件的正确设置对于获得准确的模拟结果至关重要。
ANSYS的轴承座结构分析教程一、实体模型的建立建立实体模型可以通过自上而下和自下而上两个途径:1、自上而下建模,首先要建立体(或面),对这些体或面按一定规则组合得到最终需要的形状。
2、自下而上建模,首先要建立关键点,由这些点建立线、由线连成面等一般建模原则是充分利用对称性,合理考虑细节。
根据题中的轴承座,由于轴承座具有对称性,只需建立轴承座的半个实体对称模型,在进行镜像操作即可。
采用自下而上的建模方法得到如下图1所示的三维实体模型:(1)生成长方体Main Menu:Preprocessor>Modeling->Create>Volumes->Block>By Dimensions输入x1=0,x2=60,y1=0,y2=20,z1=0,z2=60平移并旋转工作平面Utility Menu>WorkPlane>Offset WP by IncrementsX,Y,Z Offsets 输入45,25,15 点击ApplyXY,YZ,ZX Angles输入0,-90,0点击OK。
创建圆柱体Main Menu:Preprocessor>Create>Cylinder> Solid CylinderRadius输入15/2, Depth输入-30,点击OK。
拷贝生成另一个圆柱体Main Menu:Preprocessor>Copy>Volume拾取圆柱体,点击Apply, DZ输入30然后点击OK从长方体中减去两个圆柱体Main Menu:Preprocessor>Operate>Subtract Volumes首先拾取被减的长方体,点击Apply,然后拾取减去的两个圆柱体,点击OK。
使工作平面与总体笛卡尔坐标系一致Utility Menu>WorkPlane>Align WP with> Global Cartesian(2)创建支撑部分Main Menu: Preprocessor -> -Modeling-Create -> -Volumes-Block -> By 2 corners & Z在创建实体块的参数表中输入下列数值:WP X = 0WP Y = 20Width = 30Height = 35Depth = 15OKToolbar: SAVE_DB(3)偏移工作平面到轴瓦支架的前表面Utility Menu: WorkPlane -> Offset WP to -> Keypoints +1. 在刚刚创建的实体块的左上角拾取关键点2. OKToolbar: SAVE_DB(4)创建轴瓦支架的上部Main Menu: Preprocessor -> Modeling-Create -> Volumes-Cylinder -> Partial Cylinder +1). 在创建圆柱的参数表中输入下列参数:WP X = 0WP Y = 0Rad-1 = 0Theta-1 = 0Rad-2 = 30Theta-2 = 90Depth = -15或者在by dimensions 下建立圆柱体,输入相应的参数,其余圆柱的创建方式相同。
2). OKToolbar: SAVE_DB(5)在轴承孔的位置创建圆柱体为布尔操作生成轴孔做准备Main Menu: Preprocessor -> Modeling-Create -> Volume-Cylinder -> Solid Cylinder +1.) 输入下列参数:WP X = 0WP Y = 0Radius = 20Depth = -32.) 拾取Apply3.) 输入下列参数:WP X = 0WP Y = 0Radius = 17Depth = -404.) 拾取OK(6)从轴瓦支架“减”去圆柱体形成轴孔.Main Menu: Preprocessor -> Modeling-Operate -> Subtract -> Volumes +1. 拾取构成轴瓦支架的两个体,作为布尔“减”操作的母体。
单击Apply2. 拾取大圆柱作为“减”去的对象。
单击Apply3. 拾取步1中的两个体,单击Apply4. 拾取小圆柱体,单击OKToolbar: SAVE_DB合并重合的关键点:Main Menu > Preprocessor > Numbering Ctrls > Merge Items •将Label 设置为“Keypoints”, 单击[OK](7)创建一个关键点在底座的上部前面边缘线的中点建立一个关键点:–Main Menu > Preprocessor > -Modeling- Create > Keypoints > KP between KPs +•拾取如图的两个关键点,单击[OK]•RATI = 0.5,单击[OK](8)创建一个三角面并形成三棱柱Main Menu > Preprocessor > -Modeling- Create > -Areas- Arbitrary > Through KPs +1. 拾取轴承孔座与整个基座的交点。
2. 拾取轴承孔上下两个体的交点3. 拾取基座上上步建立的关键点,单击OK完成了三角形侧面的建模。
4.沿面的法向拖拉三角面形成一个三棱柱。
–Main Menu > Preprocessor > -Modeling-Operate > Extrude > -Areas- Along Normal +•拾取三角面, 单击[OK]5. 输入DIST = -3,厚度的方向是向轴承孔中心, 单击[OK]Toolbar: SAVE_DB(9)关闭working plane display.Utility Menu: WorkPlane -> Display Working Plane (toggle off)(10)粘接所有体.Main Menu: Preprocessor -> Modeling-Operate -> Booleans-Glue -> Volumes +拾取AllToolbar: SAVE_DB二、网格划分网格划分是有限元分析的关键环节,有时候好的网格划分不仅可以节约计算时间,而且往往是求解成功的关键。
划分网格一般包括以下三个步骤:定义单元属性(TYPE、REAL、MAT)、制定网格的控制参数、生成网格。
为了精确揭示轴承座的应力、变形情况,建模时考虑到轴承座的对称剖分式,它的具体结构和载荷具有对称性,因此我们取一个轴承座的一半进行分析。
在进行划分网格时,单元类型采用20节点的SOLID95六面体单元,使用扫掠网格对体进行划分,同时对网格划分进行控制,是那些不能进行扫掠的部分实体自动进行四面体网格划分。
具体步骤如下:1、定义材料属性:依次选择Main Menu->Preprocessor->Material->Structural-Linear-Elastic-Isotropic 在弹出来的对话框中指定线弹性材料的弹性模量EX=2.07e11pa,泊松比PRXY=0.3,单击OK按钮确定操作无误后,在工具栏中选择保存数据库按钮(SAVE-DB),保存数据库文件。
2、用网格划分工具Mesh Tool将几何模型划分单元依次选择Main Menu->Preprocessor->Mesh Tool,启动网格划分工具,将智能网格划分(Smart Sizing)设定为“on”;将滑动码设置为“8”;确认Mesh Tool的各项为“Volumes”,“Tet”和“Free”;单击MESH按钮,然后选择Pick all按钮,单击OK按钮。
关闭Mesh Tool对话框。
效果图如下所示:确定操作无误后,在工具栏中选择保存数据库按钮(SAVE-DB),保存数据库文件。
三、轴承座载荷的施加1、根据已有条件有:轴承孔所受到的径向合力为Fr=18x1000N=18000N;轴承孔半径r=17mm;轴承孔厚度b=12mm。
由于我们只截取一半模型进行结构分析,故半个轴承座孔的径向均布载荷P0=5.6172x107 pa,而实际情况轴承孔所承受的并非均布载荷,轴承孔最下部分受载荷最大,左右两腰部分所受载荷最小几乎为零,即轴承座孔面上所受载荷是非线性的。
故,我们将其近似为P1=P0x0.75=4.2129x107pa。
轴向均布压力载荷P2=0.2P0=1.1234x107pa。
2、轴承座的约束情况:根据实际结构和安装情况,轴承座是靠底座的四个螺栓孔与安装基座相连接来实现固定的,此处为刚性约束,可以在其孔面上施加限制X、Z方向的对称约束,而在底面边线上施加Y方向上为应为零的约束。
这样与实际情况基本相符。
3、具体模型加载步骤如下:(1)约束两个安装孔依次选择Main Menu: Solution→Define Load→Apply→Structural→Displacement →Symmetry B.C. →On Areas 拾取两个安装孔的4个柱面(每个圆柱面包括两个面),单击OK(2)在整个基座的底部施加位移约束(UY=0)依次选择Main Menu: Solution→Define Load→Apply→Structural→Displacement →on Lines +拾取基座底部的三条边界线,picking menu中的“count”应等于3,单击OK,选择UY 作为约束自由度,单击OK。
(3) 在导孔端面上施加推力载荷(面载荷)Main Menu: Solution→Define Load→Apply→Structural→Pressure→On Areas→拾取轴承孔上宽度为“3”的所有面→OK→输入面上的压力值“4.2129x107pa”→Apply(4)用箭头显示压力值依次选择Utility Menu->PlotCtrls->Symbols,将“Show pres and convect as”选项为“Arrows”,单击OK按钮。
(5)在轴承孔的下半部分施加径向压力载荷依次选择Main Menu: Solution→Define Load→Apply→Structural→Pressure→On Areas→拾取宽度为17的所有柱面→OK→输入压力值1.1234x107pa→OK依次选择Main Menu->Solution->Solve-Current LS,浏览状态窗口中出现的信息,然后关闭此窗口;单击OK按钮(开始求解,并关闭由于单元形状态检查而出现的警告信息);求解结束后,关闭信息窗口最终得到的模型加载如下图所示:4、求解及结果分析。