城市轨道交通列车驾驶模式
- 格式:docx
- 大小:13.06 KB
- 文档页数:3

城市轨道交通列车折返操作列车到达终点站后,司机开关门作业完毕,待进入折返线的信号开放,司机驾驶列车进入折返线;在折返线停稳后进行换端作业,再驾驶列车进入站台。
一、ATO模式下的折返ATO模式下的折返包括有人自动折返和无人自动折返两种1、有人自动折返。
该折返模式的实现条件是列车处于ATO驾驶模式,且折返过程中司机在列车上。
(1)列车到达折返站,清客完毕,关闭车门及站台安全门。
(2)司机按下ATO发车按钮,列车驶入折返线并自动停车。
(3)列车停稳后,司机拔出当前司机室钥匙,到另一端司机室插入钥匙,或联控换端,由在另一端司机室的司机插入钥匙,激活司机室,司机确认ATO模式建立,按下ATO发车按钮,列车驶到发车站台。
2、无人自动折返。
该折返模式的实现条件是列车处于ATO驾驶模式,信号系统具备无人自动折返功能,折返过程中列车上无司机。
(1)列车到达折返站,清客完毕,关闭车门和站台安全门,司机将驾驶模式转换为ATB模式,将主控手柄转换至“N”位,方向手柄转换至“0”位,按下自动折返按钮,拔出钥匙后锁好司机室侧门下车。
(2)司机下车后按压站台自动折返按钮,列车自动运行至折返线并折返运行至发车站台,完全停稳后自动打开车门和站台安全门。
司机进入司机室,激活列车前端司机室。
二、ATP模式下的折返列车在终点站进行站后折返时,当停站时间已到,待进入折返线的信号开放,司机以ATP模式驾驶列车进入折返线。
列车在折返线停稳后进行换端作业,以ATP 模式运行至发车站台。
三、IATP模式下的折返列车到终点站后折返时,当停站时间已到,待进入折返线的信号开放,司机以IATP模式驾驶列车进入折返线。
列车在折返线停稳后,进行换端作业。
换端后,司机将模式开关1转换至“RM”位置,以RM模式运行至发车站台,确认TOD显示屏显示IATP可用,先将模式开关1转换至“IATP”位置,然后进行开关门作业。
四、联锁模式下的折返该折返模式的实现条件为:在联锁控制模式下,若车载信号系统正常,则司机采用相应驾驶模式,如采用NRM驾驶模式,必须得到行车调度员同意,并限速25 km/h运行;若车载信号系统故障,则只能采用NRM驾驶模式运行。
城市轨道交通rm模式驾驶流程步骤下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!城市轨道交通RM模式驾驶流程详解城市轨道交通是现代城市中不可或缺的公共交通工具,其安全、高效运行离不开严谨的操作流程。
URBAN RAIL TRANSIT轨道交通灵活编组列车驾驶模式分析王舟帆1,柴鹏鹏2,赵 兴2,杜金娟2(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.河北雄安轨道快线有限责任公司,河北保定 071700)摘要:灵活编组是轨道交通进一步提升列车运行效率,实现运能与需求动态匹配的关键。
结合灵活编组列车运行场景,针对驾驶模式,从编队形成、编队保持和编队解编3个方面重点分析全自动运行系统对灵活编组作业适应性,并提出一种可行的基于全自动运行系统的驾驶模式解决方案。
关键词:灵活编组;驾驶模式;全自动运行中图分类号:U292.3+1 文献标志码:A 文章编号:1673-4440(2022)05-0077-05Rail Transit Operating Mode of Flexible Coupling Train SetWang Zhoufan 1, Chai Pengpeng 2, Zhao Xing 2, Du Jinjuan 2(1. CRSC Research & Design Institute Group Co., Ltd., Beijing 100070, China)(2. Hebei Xiongan Rail Transit Co., Ltd., Baoding 071700, China)Abstract: Flexible coupling is the key to improve train operation efficiency and achieve dynamicbalance between transportation capacity and demand. Combined with the operation scenarios of flexible coupling trains, aiming at the operating mode, this paper analyzes the adaptability of Fully Automatic Operation (FAO) system to flexible coupling operation from three aspects of coupling, keeping and decoupling train set formation, and puts forward a feasible solution of operating mode based on FAO system.Keywords: flexible coupling; operating mode; FAODOI: 10.3969/j.issn.1673-4440.2022.05.015收稿日期:2021-04-12;修回日期:2022-03-21基金目号:国家重点研发计划项目(2017YFB1200700)第一作者: 王舟帆(1991—),男,工程师,硕士,主要研究方向:轨道交通信号自动控制,邮箱:wangzhoufan@ 。
客车运行中的操作司机在本线的车厂与车厂调度员办理客车接车手续, 并按规定于客车出库前30分钟进行整备作业,具体整备作业内容按GDY/QW-CW09-16?一号线客车司机手册?、GDY/QW-CW09-22?二号线客车司机手册?中的规定。
一号线的具体规定。
1客车出车厂时,司机凭出车厂开放的信号,采用RM模式驾驶客车运行到转换轨一度停车,自动转换SM模式驾驶进入车站。
2 客车入车厂时,司机在西朗站播送通知乘客全部下车后关好车门,以ATO模式驾驶客车进入转换轨人工转换RM模式,凭入车厂信号机的显示驾驶进入车厂。
3客车在车站停稳后自动开车门。
司机迅速翻开驾驶室门,跨出半步,观察乘客上下车情况并准确关车门〔一般DTI显示10S 时开始关车门〕。
当车门关闭后,司机迅速作出与车辆垂直的立式动作,再次确认车门是否关好。
当司机坐入驾驶台后,在动车前须通过观察镜观察站台情况。
4客车进站停车头部越过停车标时,如驾驶室后第一个客室门对着站台,按规定开门;客车停车位置越出站台2个车门及以下时,司机切除该车门开关再翻开其他车门上下乘客。
司机发现未到位停车时,立即手动对位停车。
5 客车在站台区内停车位置超出站台3个车门及以上时,报告行调,经行调同意,司机不开车门继续运行到前方站停车。
行调应通知前方站。
车站应及时对站台播送,站台岗维持好秩序。
7.5.2.6客车司机在运行中要掌握好各种速度,客车在一号线运行速度规定见表14 。
表14 客车运行速度二号线的具体规定。
1 客车从赤沙车厂出发时,司机凭出车厂开放的信号,采用RM 模式驾驶,到转换轨转换驾驶模式,凭S814〔或S816〕信号机的显示进入出/入车厂线路运行,以ATO模式驾驶进入磨碟沙车站。
2 客车入车厂前,司机按?运营时刻表?的规定或行调的命令,在万胜围或磨碟沙站播送通知乘客全部下车后关好车门,在磨碟沙站以ATO模式驾驶客车进入入车厂〔或出车厂〕线,在转换轨人工转换RM模式,凭入车厂信号机的显示驾驶进入车厂。

城市轨道交通列车驾驶模式城市轨道交通列车驾驶模式一、全自动驾驶模式——ATO模式1、司机将模式开关1转换至“ATO”位置,在此模式下,列车的起动、加速、巡航、惰行、制动、精确停车、开门及折返等由车载信号设备自动控制,不需要司机操作。
2、列车在站台停稳,车载信号设备给出门允许信号后,车门及安全门自动打开。
3、停站时间结束后,需要人工关闭车门,门关好后,按下ATO 发车按钮,列车启动。
4、车载信号设备连续监控列车的速度,并在超过规定速度时自动实施常用制动,在超过最大允许速度时自动实施紧急制动。
5、所有必要的驾驶信息将在司机室TOD屏上显示。
二、速度监控下的人工驾驶模式——ATP模式1、司机将模式开关1转换至“ATP”位置,在此模式下,列车的速度、监控、运行及制动在车载信号设备限制下由司机操作。
2、开关车门由司机人工控制,但开车门仅在车载信号设备给出门允许信号时才允许操作。
3、车载信号设备连续监控列车速度,并在超过规定速度时实施常用制动。
在超过最大允许速度时实施紧急制动。
4、所有必要的驾驶信息将在司机室TOD屏上显示。
三、限速人工驾驶模式——RM模式1、司机将模式开关1转换至“RM”位置,在此模式下,列车的速度、监控、运行及制动由司机人工控制。
2、车载信号设备不提供门允许信号,开关车门时需转至NRM模式。
3、车载信号设备仅对列车特定速度(25 km/h)进行超速防护,列车超速(大于25 km/h)时自动施加紧急制动。
4、所有必要的驾驶信息将在司机室TOD屏上显示。
四、点式ATP模式——IATP模式点式ATP模式作为最常用的后备模式在CBTC系统无法启用的条件下使用,此时车载通信系统不能实现连续数据传输,依靠固定点式设备进行车地间的点式通信。
1、司机将模式开关1转换至“IATP”位置,司机得到行车调度员可以动车的指令后,按下驾驶台上的IATP释放按钮。
在此模式下,列车的速度、监控、运行及制动由司机人工控制。
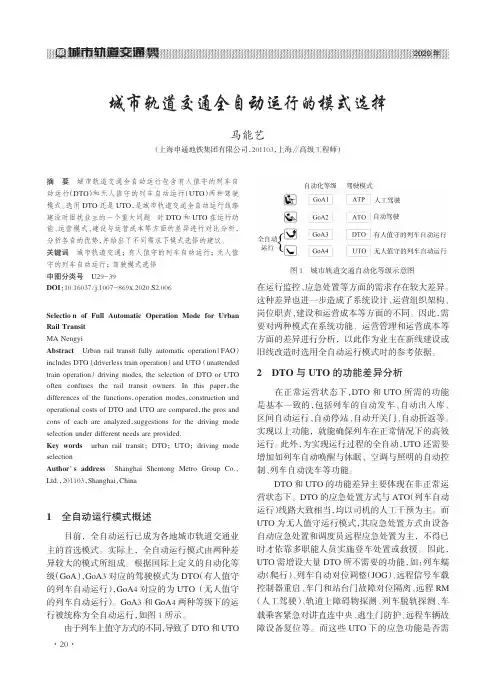
城市轨道交通摘要城市轨道交通全自动运行包含有人值守的列车自动运行(DTO )和无人值守的列车自动运行(UTO )两种驾驶模式。
选用DTO 还是UTO ,是城市轨道交通全自动运行线路建设时困扰业主的一个重大问题。
对DTO 和UTO 在运行功能、运营模式、建设与运营成本等方面的差异进行对比分析,分析各自的优势,并给出了不同需求下模式选择的建议。
关键词城市轨道交通;有人值守的列车自动运行;无人值守的列车自动运行;驾驶模式选择中图分类号U 29-39DOI :10.16037/j .1007-869x .2020.S 2.006Selectio n of Full Automatic Operation Mode for Urban Rail Transit MA Nengyi AbstractUrban rail transit fully automatic operation (FAO )includes DTO (driverless train operation )and UTO (unattended train operation )driving modes,the selection of DTO or UTO often confuses the rail transit owners.In this paper ,the differences of the functions ,operation modes ,construction and operational costs of DTO and UTO are compared ,the pros and cons of each are analyzed ,suggestions for the driving mode selection under different needs are provided.Key words urban rail transit ;DTO ;UTO ;driving modeselectionAuthor ′s addressShanghai Shentong Metro Group Co.,Ltd.,201103,Shanghai ,China1全自动运行模式概述目前,全自动运行已成为各地城市轨道交通业主的首选模式。
城市轨道交通列车驾驶模式
一、全自动驾驶模式——ATO模式
1、司机将模式开关1转换至“ATO”位置,在此模式下,列车的起动、加速、巡航、惰行、制动、精确停车、开门及折返等由车载信号设备自动控制,不需要司机操作。
2、列车在站台停稳,车载信号设备给出门允许信号后,车门及安全门自动打开。
3、停站时间结束后,需要人工关闭车门,门关好后,按下ATO发车按钮,列车启动。
4、车载信号设备连续监控列车的速度,并在超过规定速度时自动实施常用制动,在超过最大允许速度时自动实施紧急制动。
5、所有必要的驾驶信息将在司机室TOD屏上显示。
二、速度监控下的人工驾驶模式——ATP模式
1、司机将模式开关1转换至“ATP”位置,在此模式下,列车的速度、监控、运行及制动在车载信号设备限制下由司机操作。
2、开关车门由司机人工控制,但开车门仅在车载信号设备给出门允许信号时才允许操作。
3、车载信号设备连续监控列车速度,并在超过规定速度时实施常用制动。
在超过最大允许速度时实施紧急制动。
4、所有必要的驾驶信息将在司机室TOD屏上显示。
三、限速人工驾驶模式——RM模式
1、司机将模式开关1转换至“RM”位置,在此模式下,列车的速度、监控、运行及制动由司机人工控制。
2、车载信号设备不提供门允许信号,开关车门时需转至NRM模式。
3、车载信号设备仅对列车特定速度(25 km/h)进行超速防护,列车超速(大于25 km/h)时自动施加紧急制动。
4、所有必要的驾驶信息将在司机室TOD屏上显示。
四、点式ATP模式——IATP模式
点式ATP模式作为最常用的后备模式在CBTC系统无法启用的条件下使用,此时车载通信系统不能实现连续数据传输,依靠固定点式设备进行车地间的点式通信。
1、司机将模式开关1转换至“IATP”位置,司机得到行车调度员可以动车的指令后,按下驾驶台上的IATP释放按钮。
在此模式下,列车的速度、监控、运行及制动由司机人工控制。
2、开关车门由司机人工控制,但开车门仅在车载信号设备给出门允许信号时才允许操作。
3、司机应根据操作规程注意控制进站对位时间及出站速度,防止出现紧急制动。
4、所有必要的驾驶信息将在司机室TOD屏上显示。
五、非限制人工驾驶模式——NRM模式
1、司机将电气柜内模式开关转换到“NRM”位置,司机操纵台模式开关处于“OFF”模式位置。
此模式下信号被切除,列车的速度、监控、运行及制动由司机人工控制,列车没有信号防护。
2、此模式在车载信号设备故障或有特殊运行需要时使用。
列车安全完全由司机人工控制。
六、无人自动折返模式——ATB模式
1、司机将模式开关1转换至“ATB”位置,车载信号系统设备处于上电等待状态,不再接收司机室内的驾驶操作命令。
2、当列车两端模式开关处于该模式时,两端车载信号设备处于工作状态;当一端车载信号设备完成自动折返时,它发送一个安全信息给另一端的车载信号设备以实现换端功能;另一端车载信号设备被激活后与轨旁通信,之前的车载信号设备断开。
一旦所有条件都满足CBTC系统运行条件,CBTC驾驶模式将被授权允许新的车载信号设备控车。
3、列车无人自动折返时,司机须按压自动折返按钮,将驾驶模式转换为ATB,拔出钥匙锁好车门下车。
七、洗车模式
1、洗车模式用于洗车或列车救援时的连挂(洗车模式时,列车速度为3 km/h)。
2、司机应先将驾驶模式转至洗车模式,再牵引动车。