第三章 空间力系
- 格式:docx
- 大小:592.63 KB
- 文档页数:15
第三章空间力系二、基本内容1. 基本概念1) 力在空间直角坐标轴的投影(a) 直接投影法:巳知力F 和直角坐标轴夹角a 、丫,则力F 在三个轴上的投 影分别为X = F cos aZ = Feos/(b) 间接投影法(即二次投影法):巳知力F 和夹角八°,则力F 在三个轴上的 投影分别为X = F sin/cos^9Y = F sin/sin 。
Z = F cos/2) 力矩的计算(a) 力对点之矩—、目的和要求能熟练地计算力在空间直角坐标轴上的投影。
熟练掌握力对点之矩与力对轴之矩的计算。
对空间力偶的性质及其作用效应有清晰的理解。
了解空间力系向一点简化的方法,明确空间力系合成的四种结果。
能正确地画出各种常见空间的约束反力。
会应用各种形式的空间力系平衡方程求解简单空间平衡问题。
对平行力系中心和重心应有清晰的概念,能熟练地应用坐标公式求物体 的重心。
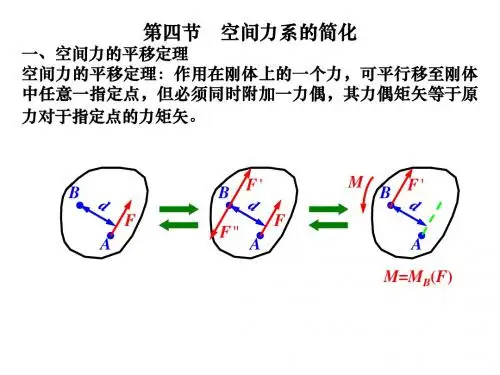
1、2、3、4、5、6^ 7、在空间情况下力对点之矩为一个定位矢量,其定义为i j kM0(F) = rx F = x y z = (yZ - zY)i + (zX - xZ)j + (xY - yX)kX Y Zr = xi + yj + zk F = Xi+ Yj + Zk其中尸为力尸作用点的位置矢径(b)力对轴之矩在空间情况下力对轴之矩为一代数量,其大小等于此力在垂直于该轴的平面上的投影对该轴与此平面的交点之矩,其正负号按右手螺旋法则来确定,即M Z(F) = ±F u,h = +2AOAB在直角坐标条下有Mx (乃=yZ-zY M y (F)=zX-xZ M z (F) =xY-yX(c)力矩关系定理力对己知点之矩在通过该点的任意轴上的投影等于同一力对该轴之矩。
在直角坐标系下有Mo(F)^M x(F)i+My(F)j+M2(F)k(d)合力矩定理空间力系的合力对任一点之矩等于力系中各力对同一点之矩的矢量和,即Mo g)二 W, (F)空间力系的合力对任一轴(例如z轴)之矩等于力系中各力对同一轴之矩的代数和,即M z(F R)=ZM z(F)=Z(xY-yX)3)空间力偶及其等效条件(a)力偶矩矢空间力偶对刚体的作用效果决定于三个要素(力偶矩大小、力偶作用面方位及力偶的转向),它可用力偶矩矢肱表示。
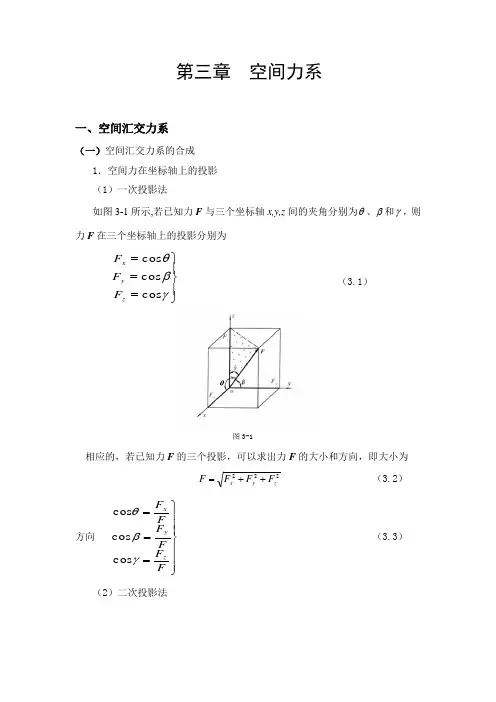
第三章 空间力系一、空间汇交力系(一)空间汇交力系的合成 1.空间力在坐标轴上的投影 (1)一次投影法如图3-1所示,若已知力F 与三个坐标轴x,y,z 间的夹角分别为θ、β和γ,则力F 在三个坐标轴上的投影分别为⎪⎭⎪⎬⎫===γβθcos cos cos z y x F F F (3.1)图3-1相应的,若已知力F 的三个投影,可以求出力F 的大小和方向,即大小为 222z y x F F F F ++=(3.2)方向 ⎪⎪⎪⎭⎪⎪⎪⎬⎫===F FF F F F z yx γβθcos cos cos(3.3)(2)二次投影法如图3-2所示,若已知力F 与坐标轴Oxy 的仰角γ以及力F 在Oxy 平面上的投影xy F 与x 轴间的夹角ϕ,则力F 在三个坐标轴上的投影分别为γϕλϕγsin sin in cos in F F Fs F Fs F z y x ===,,图3-22.合力投影定理 合力在某轴上的投影,等于各分力在同一坐标轴上投影的代数和。
即∑=+++=xixn x x Rx FF F F F 21 同理 ∑∑==ziRz yi RyF F F F ,3.空间共点力系的合成空间共点力系可以合成为一个合力,该合力的作用线通过力系的公共作用点,合力的大小和方向为()()()222∑∑∑++=zyxR F F F F (3.4)()()()⎪⎪⎪⎭⎪⎪⎪⎬⎫===∑∑∑R z R R yRR xRF F F F F F k F j F i F ,cos ,cos ,cos(3.5)(二)空间汇交力系的平衡 1.空间汇交力系的平衡条件空间汇交力系平衡的充要条件是合力等于零,即()()()0222=++=∑∑∑zyxR F F F F2.空间汇交力系的平衡方程根据平衡条件,得到空间汇交力系的平衡方程为⎪⎪⎭⎪⎪⎬⎫===∑∑∑000y x zFFF(3.6)利用上述三个方程,可以求解3个未知量。

第三章 空间力系一、 判别题(正确和是用√,错误和否用×,填入括号内。
) 4-1 力对点之矩是定位矢量,力对轴之矩是代数量。
( √ )4-2 当力与轴共面时,力对该轴之矩等于零。
( √ )4-3 在空间问题中,力偶对刚体的作用完全由力偶矩矢决定。
( √ )4-4 将一空间力系向某点简化,若所得的主矢和主矩正交,则此力系简化的最后结果为 一合力。
( √ )4-5 某空间力系满足条件:ΣΣΣΣy x y F 0,Z 0,M (F )0,M (F )0====,该力系简化的最后结果可能是力、力偶或平衡。
( √ )4-6 空间力对点之矩矢量在任意轴上的投影,等于该力对该轴之矩。
( × ) 4-7 空间力对点之矩矢量在过该点的任意轴上的投影等于该力对该轴之矩。
( √ ) 4-8 如果选取两个不同的坐标系来计算同一物体的重心位置,所得重心坐标相同。
( × )4-9 重心在物体内的位置与坐标系的选取无关。
( √ )4-10 如题图4-10所示,若力F 沿x 、y 、z 轴的分力为F x 、F y 和F z ,则力F 在x 1轴上的投影等于F x 和F z 在x 1轴上的投影的代数和。
( √ )4-11 在题图4-10中,当x 1轴与z 轴间的夹角⎪⎭⎫ ⎝⎛=c b arctg ϕ时,力F 才能沿x 1轴和y 轴分解成两个分量。
( √ ) 4-12 由n 个力系组成的空间平衡力系,若其中(n -1)个力相交于A 点,则另一个力也一定通过A 点。
( √ )4-13 空间汇交力系在任选的三个投影轴上的投影的代数和分别为零,则汇交力系一定平衡。
( × )4-14 某空间力系由两个力组成,此二力既不平行,又不相交,则该力系简化的最终结果为力螺旋。
( √ )4-15 空间任意力系的合力(如果存在合力)的大小一定等于该力系向任一点简化的主矢大小。
( √ )题4-10图4-16 任一平衡的空间汇交力系,只要A 、B 、C 三点不共线,则∑M A (F ) = 0,∑M B (F ) = 0和∑M C (F ) = 0是一组独立的平衡方程。
第三章 空间力系一、是非题判断题3.1.1 对一空间任意力系,若其力多边形自行封闭,则该力系的主矢为零。
( ∨ ) 平面力系中,若其力多边形自行闭合,则力系平衡。
( × )3.1.2只要是空间力系就可以列出6 个独立的平衡方程。
( × ) 3.1.3若由三个力偶组成的空间力偶系平衡,则三个力偶矩矢首尾相连必构成自行封闭的三角形。
( ∨ ) 3.1.4 空间汇交力系平衡的充分和必要条件是力系的合力为零;空间力偶系平衡的充分和必要条件是力偶系的合力偶矩为零。
( ∨ )二、填空题3.2.1 若一空间力系中各力的作用线平行于某一固定平面,则此力系有 5 个独立的平衡方程。
3.2.2 板ABCD 由六根杆支承如图所示,受任意已知力系而处于平衡,为保证所列的每个方程中只包含一个未知力,则所取力矩平衡方程和投影平衡方程分别为 :三、计算题3.3.1在图示力系中,F 1=100N ,F 2=300N ,F 3=200N ,各力作用线位置如图所示,求力系向点O 简化的结果。
∑=0CD M 6F ⇒∑=0CG M 5F ⇒∑=0AC M 4F ⇒∑=0DHM 1F ⇒∑=0CDF 3F ⇒∑=0BDM2F ⇒Rx F ' 解: 510013100N 3345.-=51002002001310020030032⨯⨯=--==∑--cos sin βαF F X Ry F 'N F Y 6249131003003002.cos =⨯===∑αRz F 'NF F Z 5610510010020010031.cos =⨯-=-==∑β)(...'N k j i k Z j Y i X F R 561062493345∑∑∑++-=⋅+⋅+⋅=∴x M 0 Nm 7951.-=510010020013100300300301032⨯⨯⨯⨯=--==∑0.3--0.1sin .cos .βαF F M x y M 0Nm F F M y 64361310020030010020102021.0.1-.sin ..-=⨯⨯⨯-=-==∑αZ M 0Nm59103.=200200200300303032⨯⨯+⨯⨯=+==∑0.30.3cos .sin .βαF F M Z3.3.2 如图所示的空间构架由三根杆件组成,在D 端用球铰链连接,A 、B 和C 端也用球铰链固定在水平地板上。
今在D 端挂一重物P =10kN ,若各杆自重不计,求各杆的内力。
3.3.3 如图所示,三圆盘A 、B 、C 的半径分别为15cm 、10cm 、5cm ,三根轴OA 、OB 、OC 在同一平面内,∠AOB 为直角,三个圆盘上分别受三个力偶作用,求使物体平衡所需的力F 和α角。
解:取销钉D 为研究对象: ∑=0Y ∑=0X 0454500=-cos cos AD BD F F AD F BDF CD F AD BD F F =⇒00000sin 45cos30sin 45cos30cos150BD AD CD F F F ∑=0Z 0153045304500000=----P F F F CD AD BD sin sin sin sin sin 由(a )式: )(cos a F F F CD AD BD 61520-==⇒)(拉.)sin cos (kN P F CD 46331531500=-=⇒)(压.kN F F AD BD 3926-==⇒将(a )式代入得: 解:由空间力偶系的平衡方程(3-20)式: ∑=0x M 0900=--A C M M )cos(α)()cos(a F 030090100=--⇒αC M BM AM x y ∑≡0Z M 自然满足 ∑=0y M 0900=--B C M M )sin(α)()sin(b F 040090100=--⇒α:)()(b a 43400300909000==--)sin()cos(αα43900=-⇒)(αctg 0013534390.==-⇒arcctg α013143.=⇒α由(a )式: N F 506030135330901030000===-=..cos )cos(α3.3.4某传动轴由A、B两轴承支承。
圆柱直齿轮的节圆直径d=17.3cm,压力角α=20º,在法兰盘上作用一力偶矩为M=1030N.m的力偶,如轮轴的自重和摩擦不计,求传动轴匀速转动时A、B两轴承的约束反力。
(答案:F Ax=4.2k N,F Az=1.54k N,F Bz=7.7k N,F Bz.=2.79k N)3.3.5 在半径为R的圆面积内挖出一半径为r的圆孔,求剩余面积的重心坐标。
(答案:x C=-rR/2(R2-r2)解:取传动轴为研究对象。
cos2=-MdFαkNdMF671220173103022.cos.cos=⨯==⇒α∑=∴0yM∵传动轴绕y轴匀速转动342220=+BZF.sin.α∑=0xM)(..sin.↓-=-=⇒kNFZB792342202200342220=-BXF.cos.α∑=0zM kNFXB667342202200..cos.==⇒=+-BAXFXαcos∑=0X kNXFXBA254200.cos=-=⇒=++BAZFZαsin∑=0Z)(.sin↓-=--=⇒kNZFZBA541200由对称性得:0=cy212211AAxAxAAxAx cciCiic++==∑∑解:由均质物体的形心坐标公式(3-30)式用负面积法:)()()(222222222rRRrrRRrR--=⋅-+⨯⋅-+⨯=ππππ3.3.6 求图示型材截面形心的坐标。
[答案:(a) x C =0,y C =6.07㎜;(b) x C =11㎜,y C =0㎜]3.3.7均质块尺寸如图所示,求其重心的位置。
[答案: x C =23.08mm ,y C =38.46㎜, z C =-28.08㎜](a)(b) 由对称性得: 0=c x 212211A A y A y A A y A y c c i Ci i c ++==∑∑(a) 解:由均质物体的形心坐标公式(3-30)式 用负面积法: mm 086.=)()()(141817247314182171724⨯-+⨯+⨯⨯-+⨯⨯=由对称性得: 0=c y (b) 解:由均质物体的形心坐标公式(3-30)式 用分割法: 21522022023215122201220⨯+⨯+⨯⨯⨯+⨯⨯+⨯⨯=321332211A A A x A x A x A A x A x c c c i Ci i c ++++==∑∑mm 11=解:由均质物体的形心坐标公式(3-30)式用分割法:212211V V x V x V VxV x c c icii c ++==∑∑1040406040806010404020604080⨯⨯+⨯⨯⨯⨯⨯+⨯⨯⨯=mm0823.=212211V V y V y V V y V y c c i ci i c++==∑∑1040406040802010404040604080⨯⨯+⨯⨯⨯⨯⨯+⨯⨯⨯=mm4638.=212211V V z V z V Vz V z c c icii c ++==∑∑104040604080510404030604080⨯⨯+⨯⨯-⨯⨯⨯+-⨯⨯⨯=)()(mm0828.-=第四章 摩 擦一、 是非判断题4.1.1 只要受力物体处于平衡状态,摩擦力的大小一定是F = ƒs F N 。
( × ) 4.1.2 在考虑滑动与滚动共存的问题中,滑动摩擦力不能应用F = ƒs F N 来代替。
( ∨ ) 4.1.3 当考虑摩擦时,支承面对物体的法向反力F N 和摩擦力F s 的合力F R 与法线的夹角φ称为摩擦角。
( × ) 4.1.4 滚动摩擦力偶矩是由于相互接触的物体表面粗糙所产生的。
(物体形变) ( × )二、 填空题4.2.1 考虑摩擦时物体的平衡问题,其特点在于 P 116 (1),(2),(3) 。
4.2.2 物快重P ,放置在粗糙的水平面上,接触处的摩擦系数为f s ,要使物块沿水平面向右滑动,可沿OA 方向施加拉力F 1如图4.1所示,也可沿BO 方向施加推力F 2如图所示,两种情况比较图 (a ) 所示的情形更省力。
4.2.3材料相同、光洁度相同的平皮带和三角皮带,如图4.2所示,在相同压力F 作用下, 三角 皮带的最大摩擦力大于 平 皮带的最大摩擦力。
(a) (b)图4.1 图4.2三、选择题4.3.1如图4.3所示,已知OA 杆重W ,物块M 重P 。
杆与物块间有摩擦,而物体与地面间的摩擦略去不计。
当水平力F 增大而物块仍保持平衡时,杆对物块M 的正压力 B 。
A 、由小变大;B 、由大变小;C 、不变。
4.3.2如图4.4所示,物块重5kN ,与水平面间的摩擦角为φm =35o ,今用与铅垂线成60o 角的力F=5kN 推动物块,则物块将 A 。
A 、不动;B 、滑动;C 、处于临界状态;D 、滑动与否不能确定。
O PϕO P ϕF 2F 1MAOF 60o 哦F F R W F φ600∵ φ = 30 0 <φf = 900 - φm = 550图4.3, 图4.4 四、计算题4.4.1 悬臂托架弹簧K 的拉力F=8N ,物块A 与BO 梁间的静摩擦系数f s =0.2,当θ=30o 时,试问物块A 是否平衡?(答案:F s =0.66N )4.4.2 重P =100N 的长方形均质木块放置在水平地面上,尺寸如图所示。
木块与地面间的摩擦系数ƒs =0.4,求木块能保持平衡时的水平力F 的大小。
(答案:F=31.25N )4.4.3 鼓轮利用双闸块制动器制动,设在杠杆的末端作用有大小为200N 的力F ,方向与杠杆垂直,如图所示。
已知闸块与鼓轮的摩擦因数f s = 0.5,又 2R =O 1O 2=KD =DC =O 1A = KL = O 2L = 0.5m ,O 1B =0.75 m ,AC =O 1D =1m ,ED =0.25m ,不计自重,求作用于鼓轮上的制动力矩。
F 解:取物块A 为研究对象 ∑=0X 0=+-θcos -TS F F F N F F F T S 660.cos =+-=⇒θF N F N F T 66823108.cos =⨯=<=θ ∴ 物块A 有向右滑动的趋势,F S 指向左边;∑=0Y 0=+-θsin -T N F F W N F W F T N 2=+-=⇒θsin y ∴最大摩擦力为: N F f F N s 40220..max =⨯==N F N F s 66040..max =<= ∴物块A 不平衡。