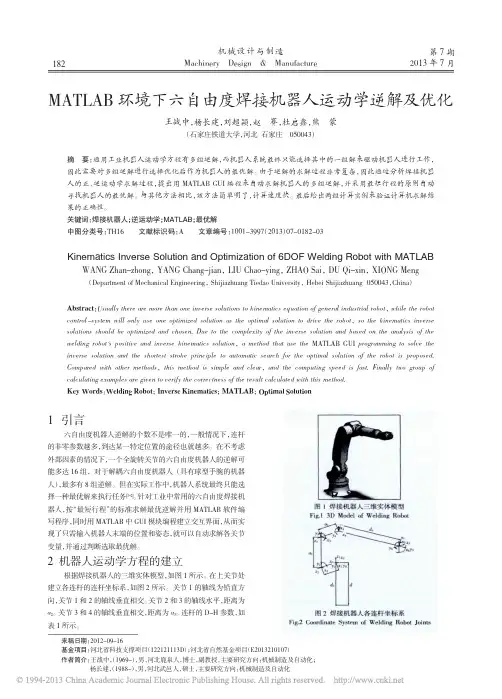
MATLAB环境下六自由度焊接机器人运动学逆解及优化_王战中
- 格式:pdf
- 大小:1.71 MB
- 文档页数:3
机器人位移逆解MATLAB实现与多值判别
贾小刚
【期刊名称】《机械工程师》
【年(卷),期】2010(000)009
【摘要】文中对关节机器人位移逆解的多值选择问题进行了分析,选择位置逆解中排除运动范围外的结果,选用与上一解运动趋势相同的解.描述了回避球形手腕奇异位置的方法,实时考察手臂是否接近奇异状态,随后保持末端位姿,调整奇异位形关节的动作.给出了选择逆解和回避奇异位置的算法流程.
【总页数】3页(P15-17)
【作者】贾小刚
【作者单位】武警工程学院,装备运输系,西安,710086
【正文语种】中文
【中图分类】TP242
【相关文献】
1.MATLAB环境下六自由度焊接机器人运动学逆解及优化 [J], 王战中;杨长建;刘超颖;赵赛;杜启鑫;熊蒙
2.基于逆位移解的DELTA机器人工作空间分析 [J], 李旭宇;何风;尹东方
3.嵌入式工业机器人遗传算法逆解的实现 [J], 王冠;林明;林永才
4.基于Matlab的六自由度工业机器人运动学逆解分析及仿真 [J], 丁志鹏;江明;游玮;梁兆东;冯海生;葛景国
5.基于MATLAB的PUMA560机器人正逆解研究 [J], 陈晗;李林升
因版权原因,仅展示原文概要,查看原文内容请购买。
六自由度机器人逆向运动学解题过程
六自由度机器人逆向运动学主要是通过求解机器人末端执行器的位姿,从而得到关节的角度。
逆向运动学求解的过程如下:
1. 了解机器人运动学模型:首先需要了解六自由度机器人的运动学模型,包括机器人臂部的结构、关节类型和运动学参数。
常见的运动学模型有DH(Denavit-Hartenberg)模型和旋量法。
2. 建立运动学方程:根据机器人臂部的结构,建立运动学方程。
对于DH模型,运动学方程为:
θ1 * A1 + θ2 * A2 + θ3 * A3 + θ4 * A4 + θ5 * A5 + θ6 * A6 = T
其中,θ1-θ6为六个关节的角度,A1-A6为相邻两个关节之间的变换矩阵。
3. 初始化关节角度:给定一个初始的关节角度序列,作为求解逆向运动学的输入。
4. 求解位姿:利用运动学方程,将关节角度序列代入,计算出末端
执行器的位姿。
5. 评价求解结果:根据实际应用需求,评价求解结果的精度和实用性。
如果结果不满足要求,可以调整初始关节角度序列,重复步骤2-4,直至得到满意的解。
6. 应用:将求解得到的关节角度序列应用于机器人控制系统,实现机器人的运动。
在求解过程中,可以使用一些优化算法,如牛顿法、梯度下降法等,以提高求解速度和精度。
同时,为了减少计算复杂度,可以采用一些技巧,如LU分解、QR分解等。
需要注意的是,六自由度机器人逆向运动学求解过程依赖于机器人运动学模型的精确性、运动学方程的稳定性和求解算法的性能。
在实际应用中,可能需要根据具体情况调整模型和算法,以获得更优的求解结果。
基于MATLAB的六轴焊接机器人运动学仿真
才洋;于功志
【期刊名称】《新技术新工艺》
【年(卷),期】2024()2
【摘要】将某符合Pieper准则的六轴焊接机器人作为实验对象,利用
SDH(Standard-Denavit-Hartenberg)方法确定其D-H参数,创建对应的关节坐标系与D-H模型。
基于MATLAB软件中机器人工具箱10.4版本展开运动学仿真,利用齐次变换矩阵与解析法完成对机器人正逆运动学的分析求解,同时验证了机器人运动学建模的合理性。
在MATLAB中完成了轨迹规划与优化,对算法进行了优化、差分与分析。
规划方式分别采用了线性规划与关节空间规划。
对运动轨迹分别采用了五次插值函数、三次插值函数、匀速优化的处理方法。
通过上述实验将优化前后进行比对发现,角速度和角加速度曲线均无骤变现象且到达点位时为零,得到的末端执行器轨迹工整圆滑,充分证明了优化后焊接机器人运动性能的稳定。
【总页数】9页(P32-40)
【作者】才洋;于功志
【作者单位】大连海洋大学航海与船舶工程学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于MATLAB的六自由度焊接机器人的运动学仿真与轨迹规划
2.基于MATLAB 的6R焊接机器人运动学的仿真研究
3.基于Matlab/Adams的工业焊接机器人运动学分析与控制联合仿真
4.基于MATLAB的五轴坡口切割机器人运动学分析与仿真
5.基于Matlab和Adams六轴焊接机器人运动学分析与轨迹规划
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Matlab对六轴机械臂逆运动学的研究摘要:运动学求逆是机器人运动规划与轨迹控制的基础,是机器人学中重要的研究内容。
本文针对一种六自由度工业机器人建立了连杆坐标系,采用DH建模方法获得串联机器人的结构参数描述,进一步建立了运动学变换矩阵方程。
将末端执行器的位置和姿态分开求解,利用解析方法对其特殊关节的非齐次方程求解,获得了该机械臂的运动学逆解,最后在Matlab软件中利用机器人工具箱对所提算法进行了仿真,验证了算法的有效性。
关键词:六轴机械臂;逆运动学;DH方法;矩阵求解11 运动学逆解机器人运动学分为正运动学和逆运动学两种,其中逆运动学一直是机器人学研究的重点,逆运动学求解是根据给定的机器人末端执行器的空间位姿求得机器人的各个关节角度,是机器人进行轨迹规划和运动控制的前提和基础[1]。
一直以来,国内外许多学者在这方面做了大量的研究,主要有:解析法、几何法、数值迭代法、基于旋量理论的四元素法等方法。
解析法和几何法运算速度快、实用性好,但是只有在机器人结构满足Pieper准则时才能得到其封闭逆解;数值迭代法适用于绝大数机器人,但只能求出方程组的特解,不能求出所有的解,而且还存在迭代过程中发散的问题。
近年来出现的神经网络法及四元数法虽然在实际当中有应用,但同时存在着模型复杂、计算量大、求解困难的问题。
虽然绝大多数的机器人满足该条件,可以通过解析法快速求得封闭逆解。
但是当存在多组解的情况下,需要选取一组作为机器人的最优解。
一般来讲,机器人的最优逆解采用选优准则,如距离最短、力矩最小等,确定机器人最优逆解的通用准则是“最短行程”原则[2],即每个关节的移动量都为最小的解,这样可以保证机器人的快速响应。
本文基于Paul反变换法(一种解析方法)求解六轴机械臂的逆解[3]。
首先根据机械臂的模型如图1所示,结合其几何参数建立机器人DH模型如表1所示,定义为绕z轴的旋转角;d为关节偏移;连杆长度;连杆扭角。
图1机械臂实物表1DH参数表0000000000假设机器人末端坐标系相对于基座标系的位姿矩阵为:(1)公式(1)为已知矩阵的变换,右边为未知矩阵,是关节变量的函数,利用矩阵右边左乘各个关节的变换矩阵,通过观察得到新的等式,分离关节变量从而求解关节变量,六轴机器人一般有多组关节解。
基于MATLAB的六自由度焊接机器人的运动学仿真与轨迹规划邢红辉;王保升;洪磊;左健民;石朗春【期刊名称】《机械设计与制造工程》【年(卷),期】2018(047)012【摘要】以六自由度焊接机器人为研究对象,采用标准D-H参数法建立坐标系与运动学方程,利用MATLAB/Robotics Toolbox工具箱建立机器人运动模型,对正运动及轨迹规划进行仿真,得到连续且平稳的末端轨迹曲线和关节角位移、角速度、角加速度的变化曲线.结合具体工件,完成了轨迹仿真和实际试验,由实际焊接点拟合得到的轨迹曲线与仿真轨迹曲线具有良好的一致性,表明仿真结果具有较高的精度和良好的平稳性,为后续机器人的离线编程系统开发打下了良好的基础.【总页数】5页(P43-47)【作者】邢红辉;王保升;洪磊;左健民;石朗春【作者单位】南京工程学院智能制造装备研究院,江苏南京 211167;南京工程学院智能制造装备研究院,江苏南京 211167;南京工程学院智能制造装备研究院,江苏南京 211167;江苏省智能制造装备工程实验室,江苏南京 211167;江苏省先进数控技术重点实验室,江苏南京 211167【正文语种】中文【中图分类】TP242;TP391.9【相关文献】1.基于MATLAB的六自由度机器人轨迹规划与仿真 [J], 王宁;张新敏2.基于Matlab的六自由度工业机器人运动学逆解分析及仿真 [J], 丁志鹏;江明;游玮;梁兆东;冯海生;葛景国3.基于MATLAB的机器人运动学仿真与轨迹规划 [J], 王晓明;宋吉;庞浩帅4.基于MATLAB的KUKA焊接机器人轨迹规划与运动学仿真 [J], 朱志伟; 李和平5.基于Matlab的UR5机器人相贯焊接模型运动学分析和轨迹规划 [J], 杨成超因版权原因,仅展示原文概要,查看原文内容请购买。
工业机器人运动学逆解的几何求解方法黄晨华【摘要】工业机器人运动学逆解求解方法的不同,其计算量也有很大的差别。
常用的代数法求逆解存在计算繁琐,不易理解等缺点,几何法求逆解具有直观、计算量小的特点。
以5自由度工业机器人为算例,详细介绍了几何法求逆解的过程,总结出了几何法求逆解的一般步骤:首先对机器人的结构进行分析,确定影响机器人末端操作器位置的相关关节,按机器人的结构直接求出各相关关节的逆解,然后利用所求的位置关节的逆解,通过简单的矩阵运算,可求得剩余关节的逆解。
用仿真的方法验证了所求逆解的正确性:假设机器人各关节的转动不受限制,首先让各关节随机转过一定的角度,用机器人正运动学方程,获得机器人任意位姿,然后以此位姿为已知,用所求的逆解求相应的各关节所转过的角度,从而验证了方法的正确性。
【期刊名称】《制造业自动化》【年(卷),期】2014(000)015【总页数】4页(P109-112)【关键词】工业机器人;运动学方程;逆运动学;几何法【作者】黄晨华【作者单位】韶关学院物理与机电工程学院,韶关512005【正文语种】中文【中图分类】TP242.20 引言工业机器人的运动学是工业机器人控制与轨迹规划的基础,其内容包括正运动学和逆运动学。
当给定机器人所有关节转过的角度时,可以通过机器人的正动学方程来确定其末端操作器的位解;当已知机器人末端操作器的位置时,则可根据运行学逆解获得各关节需转过后角度。
机器人运动学建模的标准方法,即D-H建模,可以很方便地得到机器人的正运动学方程,而要获得机器人的逆运动学方程,则难度较大,求解的方法可以分成两大类:数值解和封闭解。
Tsai[2]等研究了通用的6自由度和5自由度的机械臂的数值解,Nakamura[3]等研究了适用了机器人控制的带有奇点鲁棒控制的数值逆解,Baker[4]等研究了冗余机械臂的数值逆解,数值解的最大不足就是计算时比较耗时,对系统造成较大的负担。
封闭解是基于解析形式的解法,其又可分为代数法和几何法,用代数法求逆解在很多机器人经典教材和文献中都有详细的论述[5~7],在此不作具体讨论,刘达[8]等为了使机器人获得更好的实时性,提出了一种解析和数值相结合的机器人逆解算法,陈庆诚[9]等提出基于旋量理论的逆运动学子问题求解算法。
六自由度机械臂matlab运动学逆解六自由度机械臂是一种常见的工业机器人,它由六个旋转关节组成,每个关节都可以在空间中进行运动。
机械臂的运动学逆解是指根据机械臂末端执行器的位置和姿态,求解出每个关节的角度,从而实现机械臂的逆运动学问题。
在机械臂的运动学逆解问题中,我们需要知道机械臂的末端执行器的位置和姿态,以及机械臂的结构参数。
首先,我们可以通过机械臂的正运动学问题来求解末端执行器的位置和姿态。
正运动学问题是指已知机械臂的关节角度,求解出末端执行器的位置和姿态。
通过正运动学问题求解出的末端执行器的位置和姿态,可以作为运动学逆解问题的输入。
运动学逆解问题的目标是求解出机械臂每个关节的角度,使得机械臂的末端执行器达到所需的位置和姿态。
为了求解运动学逆解问题,我们可以使用旋转矩阵或四元数来表示机械臂的姿态,使用向量来表示机械臂的位置。
运动学逆解问题的求解方法有多种,其中一种常用的方法是使用解析方法。
解析方法通过将机械臂的运动学模型转化为一系列的方程,然后求解这些方程,从而得到机械臂的关节角度。
解析解法的优点是求解速度快,计算量小,但是对于复杂的机械臂结构和运动学模型,可能无法得到解析解。
另一种常用的求解方法是数值方法,例如使用迭代法或优化算法。
数值方法通过迭代的方式逼近机械臂的关节角度,使得机械臂的末端执行器的位置和姿态与所需的位置和姿态尽可能接近。
数值方法的优点是适用于复杂的机械臂结构和运动学模型,但是求解速度相对较慢。
在MATLAB中,可以使用机器人工具箱(Robotics Toolbox)来求解六自由度机械臂的运动学逆解问题。
机器人工具箱提供了一系列的函数和工具,用于求解机械臂的正运动学和逆运动学问题。
使用机器人工具箱,我们可以通过输入机械臂的结构参数和末端执行器的位置和姿态,来求解机械臂的逆运动学问题。
除了MATLAB中的机器人工具箱,还有其他的机器人运动学库和软件可以用于求解机械臂的运动学逆解问题,例如ROS(Robot Operating System)和OpenRave等。
我们需要定义一下本文要讨论的主题:matlab中逆运动学求解六组解的自编算法。
逆运动学问题是机器人学领域中的一个重要问题,它涉及到如何根据机器人末端执行器的位置和姿态来求解机器人关节的位置和角度。
在这篇文章中,我们将介绍一种用于求解逆运动学问题的自编算法,该算法在matlab环境下实现,并且能够求解机器人六组关节位置和角度的解。
1. 问题定义在机器人学中,逆运动学问题是一个经典的问题,它要解决的是根据机器人末端执行器的位置和姿态来求解机器人关节的位置和角度的问题。
这个问题在机器人的运动控制中具有十分重要的作用,因为它可以帮助机器人实现复杂的运动任务。
2. 逆运动学问题的求解方法目前,工程师们已经提出了多种方法来求解逆运动学问题。
其中一种常见的方法是使用数值优化算法,比如牛顿法、拟牛顿法等。
另外一种方法是使用闭式解析方法,比如雅可比矩阵法、D-H参数法等。
3. 算法设计基于以上的问题定义和逆运动学问题的求解方法,我们设计了如下的基于matlab的逆运动学求解算法:1)我们需要定义机器人的结构和运动学参数。
这包括机器人的关节数、关节类型、关节参数等。
2)我们需要定义机器人的运动学模型,包括正运动学方程和雅克比矩阵。
3)我们根据机器人的末端执行器的位置和姿态,利用逆运动学模型来求解机器人的关节位置和角度。
4)我们通过编写matlab代码来实现上述的逆运动学求解算法,并对其进行测试和验证。
4. 算法实现基于以上的算法设计,我们编写了如下的matlab代码来实现逆运动学求解算法:```matlab代码实现function [q1,q2,q3,q4,q5,q6] =inverseKinematics(pos,orientation)逆运动学求解算法输入:末端执行器的位置和姿态输出:机器人的六组关节位置和角度解步骤1:定义机器人的结构和运动学参数...步骤2:定义机器人的运动学模型...步骤3:根据机器人的末端执行器的位置和姿态,利用逆运动学模型来求解机器人的关节位置和角度...步骤4:返回六组关节位置和角度解...end```5. 算法测试与验证为了验证我们的自编算法的有效性,我们选取了一个具体的机器人模型,并对其进行了逆运动学求解。
基于MATLAB的六自由度工业机器人运动分析及仿真六自由度工业机器人是一种常见的工业自动化设备,通过对其运动进行分析和仿真,可以对其性能进行评估和优化。
MATLAB是一种强大的数学计算软件,在工程领域广泛应用,可以帮助我们进行机器人的运动分析和仿真。
首先,我们可以使用MATLAB对六自由度机器人进行建模。
六自由度机器人具有六个自由度,分别为三个旋转自由度和三个平移自由度。
我们可以使用MATLAB的机器人工具箱来建立机器人的模型,并定义其关节参数和连接方式。
通过模型可以获得机器人的几何结构、动力学参数和运动学方程。
接下来,我们可以使用MATLAB进行机器人的运动分析。
运动分析是指通过对机器人的运动学和动力学进行计算,从而获得机器人的运动和力学特性。
机器人的运动学分析主要是利用机器人的几何结构来推导出末端执行器的位置和姿态。
可以使用MATLAB的运动学工具函数来计算机器人的正运动学和逆运动学。
机器人的动力学分析主要是研究机器人的运动和力学特性之间的关系。
动力学分析可以帮助我们确定机器人的运动特性和关节力矩。
我们可以使用MATLAB的动力学工具箱来建立机器人的动力学模型,并使用动力学工具函数来计算机器人的动力学性能。
最后,我们可以使用MATLAB进行机器人的仿真。
机器人的仿真是通过对机器人的动力学进行数值计算,来模拟机器人的运动和力学特性。
通过仿真可以验证机器人的设计和控制方案,并进行参数优化。
在MATLAB 中,我们可以使用数值计算函数和绘图函数来进行机器人的仿真和可视化。
总结起来,基于MATLAB的六自由度工业机器人运动分析及仿真可以帮助我们对机器人的运动和力学特性进行研究和优化。
通过建立机器人的模型,进行运动分析和动力学分析,以及进行仿真和可视化,可以帮助我们理解和改进机器人的性能,在工业自动化领域发挥更大的作用。
专利名称:一种六自由度串联机器人运动学逆解的求解方法专利类型:发明专利
发明人:谷菲
申请号:CN201210131150.7
申请日:20120428
公开号:CN102637158A
公开日:
20120815
专利内容由知识产权出版社提供
摘要:本发明公开了一种六自由度串联机器人运动学逆解的方法,其步骤是:(1)建立连杆坐标系,设定变量θ,θ,θ,θ,θ,θ;(2)设定初始位形;(3)利用几何法求解θ,θ,θ;(4)利用代数消元法θ,θ,θ;并在求非正交球型或者非正交非球型的末端结构时引入禁忌搜索法从而求解出相应的数字解。
本发明构思巧妙,利用几何法和代数消元法综合求解,避免了任意构造方程导致方程系数行列式的秩小于阶数的问题,更高效准确地求解6个轴的解析解,且对于复杂机构的三角函数关系利用几何法可以有效地使用消元法将二元一次方程转化为一元一次,从而得到对应唯一的解析解。
申请人:谷菲
地址:610000 四川省成都市金牛区金琴路南三巷1幢3单元12号
国籍:CN
代理机构:成都顶峰专利事务所(普通合伙)
代理人:成实
更多信息请下载全文后查看。
MATLAB环境下六自由度焊接机器人运动学逆解及优化王战中;杨长建;刘超颖;赵赛;杜启鑫;熊蒙【期刊名称】《机械设计与制造》【年(卷),期】2013(000)007【摘要】通用工业机器人运动学方程有多组逆解,而机器人系统最终只能选择其中的一组解来驱动机器人进行工作,因此需要对多组逆解进行选择优化后作为机器人的最优解.由于逆解的求解过程非常复杂,因此通过分析焊接机器人的正、逆运动学求解过程,提出用MATLAB GUI编程来自动求解机器人的多组逆解,并采用最短行程的原则自动寻找机器人的最优解.与其他方法相比,该方法简单明了,计算速度快.最后给出两组计算实例来验证计算机求解结果的正确性.【总页数】3页(P182-184)【作者】王战中;杨长建;刘超颖;赵赛;杜启鑫;熊蒙【作者单位】石家庄铁道大学,河北石家庄050043;石家庄铁道大学,河北石家庄050043;石家庄铁道大学,河北石家庄050043;石家庄铁道大学,河北石家庄050043;石家庄铁道大学,河北石家庄050043;石家庄铁道大学,河北石家庄050043【正文语种】中文【中图分类】TH16【相关文献】1.六自由度焊接机器人大臂模态分析及优化∗ [J], 林义忠;廖继芳;刘庆国;徐俊2.VBA及MATLAB环境下焊接机器人计算机图形仿真系统的开发 [J], 邓宇;梁飞华;岑健;邢镇容3.基于Matlab的六自由度工业机器人运动学逆解分析及仿真 [J], 丁志鹏;江明;游玮;梁兆东;冯海生;葛景国4.基于MATLAB的六自由度焊接机器人的运动学仿真与轨迹规划 [J], 邢红辉;王保升;洪磊;左健民;石朗春5.基于SolidWorks和ANSYS Workbench的六自由度焊接机器人的建模与优化设计 [J], 袁安富;陈成因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB的六自由度工业机器人运动分析及仿真摘要:工业机器人是现代制造工业中广泛应用的先进装备之一,其主要功能是进行重复、高精度和高负荷的工作。
机器人的运动分析和仿真是机器人研究中一个重要的方面,可以通过模拟机器人的运动过程来优化机器人的工作效率和准确性。
本文基于MATLAB环境,对六自由度的工业机器人进行运动分析和仿真研究,提供一种快速、准确且可靠的方法。
引言:工业机器人具有广泛的应用领域,包括汽车制造、电子设备组装、医疗设备等。
机器人的运动分析和仿真是机器人研究中的一个重要步骤,可以帮助工程师优化机器人的设计和运动控制算法。
MATLAB是一种强大的科学计算和虚拟实验环境,可以用于机器人的运动分析和仿真。
方法:本文基于MATLAB环境,采用正运动学和逆运动学方法实现了六自由度工业机器人的运动分析和仿真。
正运动学通过已知关节角度计算机器人末端执行器的位置和姿态。
逆运动学则根据给定的末端执行器的位置和姿态确定关节角度。
同时,使用MATLAB中的3D绘图工具箱将机器人的运动过程进行仿真展示。
结果与讨论:通过正运动学和逆运动学计算,可以得到机器人在给定关节角度下的位置和姿态信息。
MATLAB的3D绘图工具箱可以将机器人的运动过程以三维动画的形式展示出来,方便工程师对机器人的运动轨迹和工作空间进行可视化分析。
结论:本文基于MATLAB环境实现了六自由度工业机器人的运动分析和仿真,提供了一种快速、准确且可靠的方法。
通过正运动学和逆运动学计算,可以得到机器人在给定关节角度下的位置和姿态信息。
MATLAB的3D绘图工具箱可以将机器人的运动过程进行可视化展示,帮助工程师对机器人的运动轨迹和工作空间进行分析和优化。
1.邱华根.《现代机器人控制技术》,清华大学出版社,2024年。
2.张骞.《机器人学导论及控制技术》,电子工业出版社,2024年。