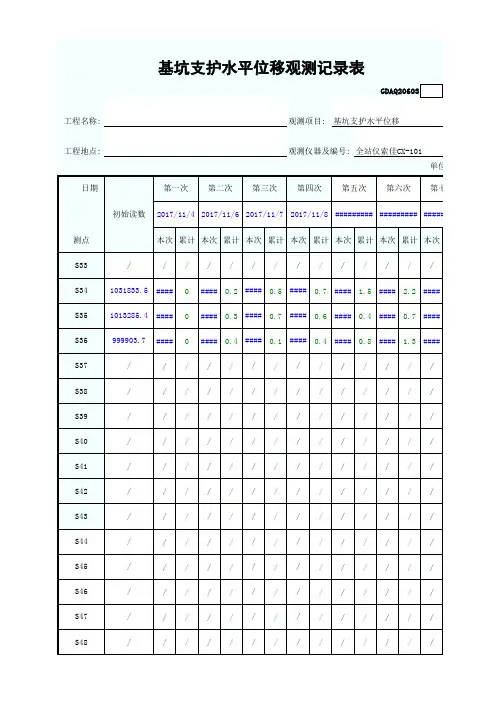
水平位移观测现用图解表
- 格式:doc
- 大小:3.50 MB
- 文档页数:81
水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月13日水平位移观测记录表基准数日期:2014年7月14日水平位移观测记录表基准数日期:2014年7月15日水平位移观测记录表基准数日期:2014年7月16日水平位移观测记录表基准数日期:2014年7月17日12水平位移观测记录表基准数日期:2014年7月18日水平位移观测记录表基准数日期:2014年7月19日水平位移观测记录表基准数日期:2014年7月20日水平位移观测记录表基准数日期:2014年7月21日水平位移观测记录表基准数日期:2014年7月22日水平位移观测记录表基准数日期:2014年7月23日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日V水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表基准数日期:2014年7月12日水平位移观测记录表。
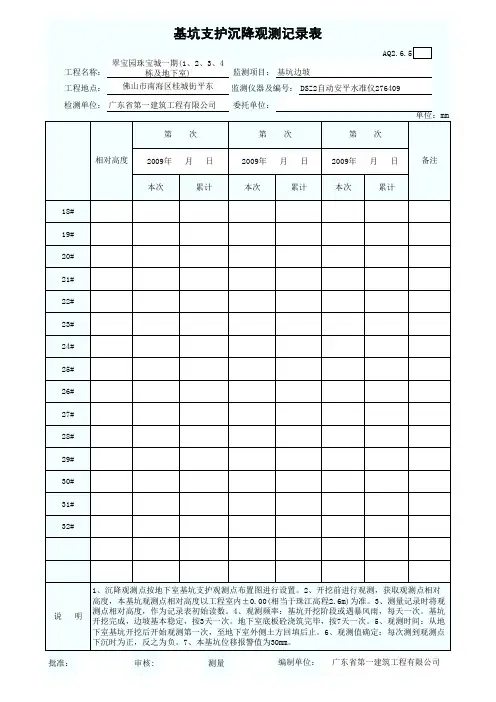


![基坑支护水平位移观测记录表[1]1](https://uimg.taocdn.com/3a9f7f33a98271fe910ef9f4.webp)
表AQ-C6-3工程名称总参四道口军队干部监测项目边坡水平住宅项目4#楼工程位移工程地点北京市海淀区四道口监测仪器博飞DJ02-C及编号监测单位江苏瑞峰建设集团有限公司日期2011.8.1 日期2011.8.2 单位:mm测初测上次位移值本次位移累计位移测初测值上次位本次位累计位点值值值点移值移值移值1 0 0 0 0 1 0 0 0 02 0 0 0 0 2 0 0 -1 -13 0 0 0 0 3 0 0 -1 -14 0 0 0 0 4 0 0 0 05 0 0 0 0 5 0 0 1 16 0 0 0 0 6 0 0 1 17 0 0 0 0 7 0 0 2 28 0 0 0 0 8 0 0 0 09 0 0 0 0 9 0 0 2 210 0 0 0 0 10 0 0 2 2沉降报警值监测单位江苏瑞峰建设集监测人项目技术负责人团有限公司监理单位意见:符合程序要求()不符合程序要求,请重新组织观测()监理工程师(签字):年月日注:本表由施工单位填报,附监测点布置图,监理单位、施工单位各存一份。
表AQ-C6-3工程名称总参四道口军队干部监测项目边坡水平住宅项目4#楼工程位移工程地点北京市海淀区四道口监测仪器博飞DJ02-C及编号监测单位江苏瑞峰建设集团有限公司日期2011.8.3 日期2011.8.4 单位:mm测初测上次位移值本次位移累计位移测初测值上次位本次位累计位点值值值点移值移值移值1 0 0 -1 -1 1 0 -1 -1 -22 0 -1 -2 -3 2 0 -2 -1 -43 0 -1 -1 -2 3 0 -1 -1 -34 0 0 1 1 4 0 1 0 15 0 1 1 2 5 0 1 1 36 0 1 0 1 6 0 0 1 27 0 2 1 3 7 0 1 2 58 0 0 0 0 8 0 0 1 19 0 2 3 5 9 0 3 2 710 0 2 1 3 10 0 1 0 3沉降报警值监测单位江苏瑞峰建设集监测人项目技术负责人团有限公司监理单位意见:符合程序要求()不符合程序要求,请重新组织观测()监理工程师(签字):年月日注:本表由施工单位填报,附监测点布置图,监理单位、施工单位各存一份。
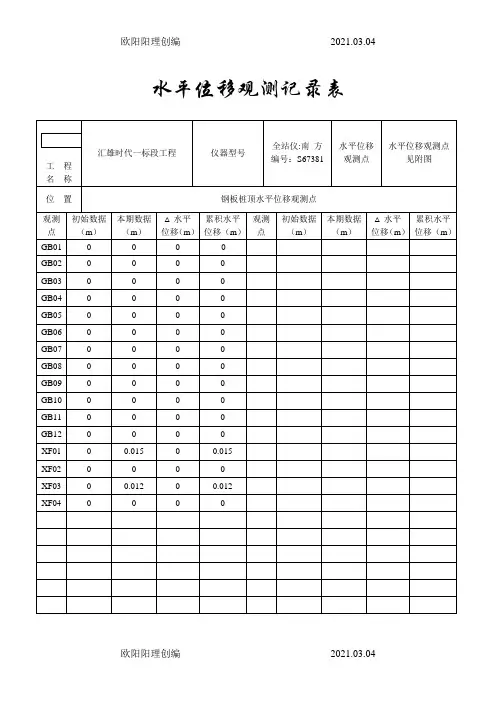
基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0 0 0 0GB02 0 0 0 0GB03 0 0 0 0GB04 0 0 0 0GB05 0 0 0 0GB06 0 0 0 0GB07 0 0 0 0GB08 0 0 0 0GB09 0 0 0 0GB10 0 0 0 0GB11 0 0 0 0GB12 0 0 0 0XF01 0 0.015 0 0.015XF02 0 0 0 0XF03 0 0.012 0 0.012XF04 0 0 0 0观测负责人观测人基准数日期:2014年7月13日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0 0 0 0GB02 0 0 0 0GB03 0 0 0 0GB04 0 0 0 0GB05 0 0 0 0GB06 0 0 0 0GB07 0 0 0 0GB08 0 0 0 0GB09 0 0 0 0GB10 0 0 0 0GB11 0 0 0 0GB12 0 0 0 0XF01 0 0.016 0.001 0.016XF02 0 0 0 0XF03 0 0.012 0 0.012XF04 0 0 0 0观测负责人观测人基准数日期:2014年7月14日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0 0.001 0.001 0.001GB02 0 0 0 0GB03 0 0 0 0GB04 0 0 0 0GB05 0 0 0 0GB06 0 0 0 0GB07 0 0 0 0GB08 0 0 0 0GB09 0 0 0 0GB10 0 0 0 0GB11 0 0 0 0GB12 0 0 0 0XF01 0 0.017 0.001 0.017XF02 0 0 0 0XF03 0 0.013 0.001 0.013XF04 0 0 0 0观测负责人观测人基准数日期:2014年7月15日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0 0.002 0.001 0.002GB02 0 0 0 0GB03 0 0 0 0GB04 0 0.001 0.001 0.001GB05 0 0 0 0GB06 0 0 0 0GB07 0 0 0 0GB08 0 0 0 0GB09 0 0 0 0GB10 0 0 0 0GB11 0 0 0 0GB12 0 0 0 0XF01 0 0 0 0XF02 0 0.018 0.001 0.018XF03 0 0 0 0XF04 0 0.014 0.001 0.014观测负责人观测人基准数日期:2014年7月16日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月17日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月18日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月19日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月20日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月21日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月22日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月23日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人基准数日期:2014年7月12日工程名称汇雄时代一标段工程仪器型号全站仪:南方编号:S67381水平位移观测点水平位移观测点见附图位置钢板桩顶水平位移观测点观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)观测点初始数据(m)本期数据(m)△水平位移(m)累积水平位移(m)GB01 0GB02 0GB03 0GB04 0GB05 0GB06 0GB07 0GB08 0GB09 0GB10 0GB11 0GB12 0XF01 0XF02 0XF03 0XF04 0观测负责人观测人。