四元数简介
- 格式:ppt
- 大小:397.00 KB
- 文档页数:16

四元数表示姿态和旋转1. 引言1.1 介绍四元数四元数是一种数学概念,最早由爱尔兰数学家威廉·哈密顿在19世纪提出。
四元数可以看作是复数的扩展,它包括了实部和三个虚部,通常用符号q = w + xi + yj + zk来表示,其中w、x、y、z分别是实部和三个虚部的系数。
四元数在姿态和旋转中有着广泛的应用,在计算机图形学、机器人学、物理模拟等领域都有着重要作用。
在旋转表示中,四元数可以更加高效地描述物体在三维空间中的旋转,避免了欧拉角表示中的万向锁问题,同时还可以实现平滑的插值和融合操作。
尽管四元数在数学上可能较为复杂,但其在姿态和旋转中的应用已经得到了广泛认可。
通过四元数,我们可以更加简洁地表达旋转操作,提高了计算效率和精度,为解决实际问题提供了强大的工具。
四元数的引入,不仅拓展了我们的数学工具箱,也为许多领域的发展带来了新的可能性。
1.2 四元数在姿态和旋转中的应用四元数在姿态和旋转中的应用非常广泛,它在航空航天、机器人、计算机图形学等领域都有重要的作用。
在航空航天领域,四元数被广泛应用于飞行器的姿态控制和导航系统中。
通过四元数表示飞行器的旋转姿态,可以更准确地描述飞行器的运动状态,实现精确的控制和导航。
在机器人领域,四元数也被用于机器人的运动规划和控制。
通过四元数表示机器人的姿态变化,可以更有效地规划机器人的运动轨迹,确保机器人在复杂环境中稳定地移动。
在计算机图形学领域,四元数被用于实现3D图形的旋转和变换。
通过四元数表示物体的旋转,可以避免旋转变换的奇异性问题,实现更流畅和自然的图形变换效果。
四元数在姿态和旋转中的应用为各个领域提供了一种有效的数学工具,可以更加精确地描述和处理物体的旋转和姿态变化。
它不仅提高了系统的性能和稳定性,也拓展了人类对于旋转和姿态变化的理解和应用。
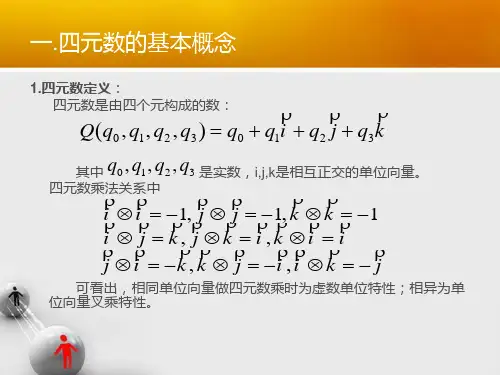
2. 正文2.1 四元数的定义四元数是一种数学概念,可以用来表示复杂的旋转和姿态。
它由一个实部和三个虚部组成,通常用符号q = q + qq + qq + qq来表示,其中q、q、q、q是实数,q、q、q是虚数单位。
四元数 nuscenes 顺序【原创实用版】目录1.介绍四元数2.解释 nuscenes3.探讨四元数与 nuscenes 的关系4.讨论四元数 nuscenes 的顺序正文1.四元数是一种数学概念,也被称为 quaternion,由爱尔兰数学家威廉·罗兰·汉密尔顿于 1843 年发现。
四元数是一种扩展了复数的概念,它可以表示为一个实数和三个虚数的组合,通常表示为 q = a + bi + cj + dk,其中 a、b、c、d 都是实数,i、j、k 是三个虚数单位,满足以下关系:i = j = k = ijk = -1。
四元数在三维空间中的旋转、姿态表示和控制等方面有着广泛的应用。
2.nuscenes(nuclear scene)是指核场景,它是一种在虚拟现实和增强现实技术中使用的三维场景表示方法。
nuscenes 通常包括一个或多个物体,以及它们的位置、旋转和缩放信息。
在 nuscenes 中,物体的姿态信息通常用四元数表示,这是因为四元数可以简洁地表示三维空间中的旋转。
3.四元数与 nuscenes 的关系在于,四元数可以用来表示和操作三维空间中的旋转,而 nuscenes 正是描述三维空间中物体的旋转和位置信息的场景表示方法。
因此,四元数是 nuscenes 的重要组成部分,也是实现nuscenes 的关键技术之一。
4.四元数 nuscenes 的顺序是指在 nuscenes 中,四元数表示的物体旋转的顺序。
在实际应用中,物体的旋转顺序可能会影响到虚拟现实或增强现实场景的表现效果。
例如,在虚拟现实游戏开发中,合理的四元数nuscenes 顺序可以使游戏场景更加流畅和自然。
因此,在创建和使用nuscenes 时,需要根据实际需求和场景来确定四元数的顺序。
综上所述,四元数是一种重要的数学概念,它可以用来表示和操作三维空间中的旋转。
nuscenes 是一种描述三维空间中物体的旋转和位置信息的场景表示方法,四元数是 nuscenes 的重要组成部分。
四元数一、四元数的来历四元数(Quaternions )最先是由爱尔兰数学家哈密顿(William Rowan Hamilton )在1843年发明的数学概念,它是最简单的超复数起初,我们所熟知的复数是由实数加上元素组成的,形式如下所示 z a ib =+将两维复数扩展至三维复数,可以得到z a ib jc =++现在把两个三维复数相乘,并化简得到12121212121212121212()()()z z a a bb c c i a b b a j a c c a ijb c jic b =--++++++ 然而,对于上式得到的结果ij 和ji 并不是确定的值,因此哈密顿引入了四维复数的概念,将z 写成四维复数的形式,即z a ib jc kd =+++这时,再将两个四维复数相乘,化简可得1212121212121212121212121212121212()()()z z a a b b c c d d i a b b a j a c c a k a d d a ijb c ikb d jic b jkc d kid b kjd c =---++++++++++++然后,哈密顿做了如下规定,即ij=k jk=i ki=j ji=-k kj=-i ik=-j按照如上规定,式化简为如下形式121212121212222111121212121212()()()()()()z z a a b b c c d d a ib jc kd a ib jc kd i c d d c j d b b d k b c c b =-+++++++++-+-+-最后,将z1,z2写成最初的形式,即111222z s v z s v =+=+式中,v1,v2分别表示z1,z2的虚数部分得到121212122112z z s s v v s v s v v v =-+++⨯哈密顿将此式中的对象z1z2叫做四元数,并把虚数部分称作是向量。

四元数x y z w的意思
四元数是一种数学概念,通常用来表示三维空间中的旋转。
它
由四个实数构成,通常表示为x, y, z, w。
其中,w是实部,而x, y, z是虚部。
四元数可以用来进行旋转、插值和姿态表示等操作。
从数学角度来看,四元数是一种超复数,它包含一个实部和三
个虚部。
它可以用来表示三维空间中的旋转,因为它可以更有效地
描述旋转的复杂性,相比于欧拉角或旋转矩阵而言,四元数的运算
更加简洁和高效。
在计算机图形学和游戏开发中,四元数也被广泛应用,因为它
们可以更有效地表示和计算三维空间中的旋转。
通过四元数,可以
避免万向锁(Gimbal Lock)等旋转过程中的问题,同时在进行插值
和连续旋转时也更加方便。
总的来说,四元数是一种用来表示三维空间中旋转的数学工具,它在计算机图形学、游戏开发和工程领域中具有重要的应用价值。
四元数和欧拉角
四元数与欧拉角:
1、四元数
四元数是一种数学物体,它由ONE个实部和THREE个虚部组成。
实部是非负实数,其余的THREE个部分是虚数。
四元数的表达式可以表示为:Q=a+bi+cj+dk (a、b、c、d是实实部)。
它们有助于以三维空间中的方式表示方向和旋转。
离散空间中表示四元数,当旋转发生时,它们保持一致。
2、欧拉角:
欧拉角是一种三维旋转矢量,可以用来表示不同方向之间的关系。
它将旋转分成THREE个不同的轴,分别为X轴、Y轴和Z轴。
每个轴都有自己的旋转角度,比如X轴有X角度,Y轴有Y角度,Z轴有Z角度。
欧拉角的表达式可以写作:[X,Y,Z],其中X、Y、Z分别表示每个轴的旋转角度。
欧拉角与四元数之间的差别在于欧拉角表示的是不同方向间的关系,而四元数表示的是不同方向的空间旋转。
可以说四元数和欧拉角均是用来表示旋转有关信息的,但是又是有所差别的。
下面我们来总结下它们两者之间的区别:
1)表示方式不同:欧拉角表示的是不同方向间的关系,而四元数是表
示不同方向的空间旋转;
2)用途不同:欧拉角被广泛应用于3D图形学处理领域,可以很方便
地实现3D模型的几何变换;而四元数方便地表示空间任意的旋转变换,是用来表达机器人的运动控制中的基本角度表示方式;
3)值域不同:欧拉角的值域为[0,2π),而四元数的值域为[-1,1];
4)叠加角度表示方法不同:四元数是可以用乘法表达累加旋转;而欧
拉角只能使用加法来表达叠加旋转。
关于四元数的几何意义和物理应用四元数是一种用来表示旋转的数学工具,由一个实部和三个虚部组成。
它起源于19世纪,最早是由爱尔兰数学家威廉·汉密尔顿提出的。
在几何中,四元数可以用来表示旋转和旋转群的变换。
在物理学中,四元数被广泛应用于描述刚体运动、航天器姿态控制、电子游戏的图形渲染等领域。
首先,我们来讨论四元数的几何意义。
四元数由一个实部和三个虚部组成,可以表示为q = a + bi + cj + dk,其中a为实部,(b,c,d)为虚部。
四元数有一些特殊的性质,例如,它可以用来表示三维空间中的旋转,在空间中的每一个点都有一个与之关联的四元数,通过四元数的乘法运算可以实现点的旋转。
这就使得四元数成为一种非常强大的旋转表示工具。
四元数还有一种重要的几何意义,即可以用来表示方位角和旋转轴。
在四元数中,实部a表示旋转的角度,虚部(b,c,d)表示旋转轴的坐标。
这使得我们可以方便地进行旋转操作,而无需进行复杂的矩阵计算。
通过四元数的乘法运算,我们可以将多个旋转操作合并为一个旋转操作,从而降低了计算的复杂度。
在物理学中,四元数有着广泛的应用。
首先,四元数被广泛应用于描述刚体的旋转。
刚体是在空间中保持形状和体积不变的物体,例如飞机、汽车等。
通过四元数,我们可以非常方便地描述刚体在空间中的姿态变换。
这在航天器姿态控制、机器人运动控制等领域都有着重要的应用。
其次,四元数还被用于电子游戏的图形渲染。
在电子游戏中,我们需要不断地渲染图像以呈现动态的场景。
通过使用四元数来表示物体的旋转,我们可以在游戏中实现非常流畅的旋转动画,同时减少计算的复杂度。
此外,四元数还被应用于量子力学中描述粒子的自旋。
在量子力学中,自旋是描述粒子内部旋转的属性。
通过使用四元数,我们可以方便地描述粒子在空间中的自旋状态。
总之,四元数在几何中的几何意义和在物理中的物理应用是非常广泛的。
它可以用来表示旋转、方位角和旋转轴,方便地进行旋转操作。
四元数表示位姿四元数是一种用来表示三维空间中的旋转的数学工具。
在计算机图形学、机器人学和航空航天等领域中,四元数广泛应用于位姿估计和运动控制等问题。
四元数的定义是一个具有四个实数分量的向量,可以表示为q = w + xi + yj +zk,其中w、x、y、z分别为实数分量。
四元数的实部w通常被称为标量部分,而xi + yj + zk则被称为矢量部分。
四元数具有一些特殊的性质,使其在表示旋转时比欧拉角更加方便和高效。
四元数的加法和乘法运算定义如下:- 加法:q1 + q2 = (w1 + w2) + (x1 + x2)i + (y1 + y2)j + (z1 + z2)k- 乘法:q1 * q2 = (w1w2 - x1x2 - y1y2 - z1z2) + (w1x2 + x1w2 + y1z2 - z1y2)i + (w1y2 - x1z2 + y1w2 + z1x2)j + (w1z2 + x1y2 - y1x2 + z1w2)k四元数的乘法运算满足结合律,但不满足交换律。
这意味着两个四元数的乘积的结果取决于它们的顺序。
在位姿表示中,四元数通常被用来表示物体或坐标系的旋转。
通过将四元数与一个表示坐标系的向量进行乘法运算,可以实现对向量的旋转变换。
这种旋转变换可以用来实现物体的姿态控制、相机的视角调整等应用。
四元数的优势在于其避免了欧拉角的万向锁问题。
欧拉角在表示旋转时存在奇异点,当旋转角度接近奇异点时,会导致失去一部分自由度,造成旋转计算的困难。
而四元数则不存在这个问题,可以有效地表示任意旋转。
四元数还具有插值和球面线性插值的性质,这使得它在动画和平滑过渡等领域中得到广泛应用。
通过在两个四元数之间进行插值,可以实现平滑的旋转过渡效果,使动画更加自然流畅。
在实际应用中,四元数的使用可以通过专门的库函数或工具包来实现。
这些库函数提供了四元数的基本运算、插值、转换为欧拉角等功能,大大简化了四元数的使用过程。
matlab四元数旋转轴四元数是一种数学概念,广泛应用于各种领域,包括机器人控制、图形处理等。
在MATLAB中,四元数旋转轴也是一个非常重要的应用,通过对轴的定义和相关函数的调用,可以实现灵活的旋转效果。
一、四元数简介四元数可以看作是复数的扩展,将实部和虚部扩展为四个分量,表示为q = a + bi + cj + dk,其中a、b、c、d是实数,i、j、k为旋转矢量。
四元数的加减法、乘法和单位元等定义与复数相似,可以用于旋转、插值等操作。
二、四元数定义旋转轴四元数可以表示任意三维向量的旋转,其中旋转轴为向量i、j、k中的一个。
在MATLAB中,可以使用quaternion函数创建四元数,格式为q = quaternion(w,x,y,z)。
其中,w表示实部,x、y、z表示虚部,与向量i、j、k的对应关系为x=i、y=j、z=k。
三、四元数的旋转变换四元数旋转的基本思想是将旋转轴的坐标表示为四元数的虚部,通过旋转角度和旋转轴的乘积,得到旋转后的四元数。
在MATLAB中,可以使用rotate函数实现,其中格式为new_q =rotate(q,theta,vector),其中new_q表示旋转后的四元数,q表示原始的四元数,theta表示旋转角度,vector表示旋转轴的坐标。
四、四元数的应用四元数旋转轴广泛应用于计算机图形学和机器人控制等领域。
在图形处理中,通过四元数的旋转变换,可以实现对三维模型的旋转、平移、缩放等操作,有效提高了图像处理的效率和精度。
在机器人控制中,四元数旋转轴可以帮助机器人实现灵活的运动控制,从而完成各种复杂任务。
五、小结通过以上的介绍,我们可以看出四元数旋转轴在MATLAB中的重要性。
在实际应用中,我们可以灵活运用四元数的定义和相关函数,实现灵活的旋转变换,从而提高计算机图形处理和机器人控制的效率和精度。
三维坐标系四元数
三维坐标系是一种由三个坐标轴构成的坐标系统,通常用来描述物体在三维空间中的位置和方向。
其中,坐标轴通常表示为x、y和z 轴,分别代表三个垂直于彼此的方向。
物体的位置可以通过在这三个坐标轴上的数值来表示,如(x, y, z)。
四元数是一种用来表示旋转的数学工具,它由一个实部和三个虚部组成。
通常表示为(q0, q1, q2, q3),其中q0是实部,q1、q2和q3是虚部。
四元数的虚部可以看作是围绕某一轴旋转的角度和方向的表示,而实部则代表旋转的量。
由于四元数具备良好的旋转性质,它被广泛应用于计算机图形学、航天航空等领域。
在三维坐标系中,四元数经常用于描述物体的旋转。
通过四元数可以方便地进行旋转的组合和插值运算,从而实现复杂的旋转变换。
相比于其他旋转表示方法,四元数具有计算效率高、无奇点等优势,因此在许多领域被广泛运用。
四元数的物理意义
四元数是一种数学工具,可以用于描述旋转、方向和空间位置等物理量。
它们由一个实部和三个虚部组成,每个部分代表一个不同的维度。
在物理学中,四元数被广泛应用于机器人学、航空航天、计算机图形学和量子力学等领域。
四元数最常见的应用是描述旋转。
在三维空间中,旋转可以用一个轴和一个角度来描述。
但是,如果要在四维空间中描述旋转,就需要使用四元数。
四元数之间的加法和乘法运算可以描述旋转的组合,从而实现复杂的旋转操作。
此外,四元数还可用于描述方向和空间位置。
对于方向,四元数可以表示一个向量的方向和旋转。
对于空间位置,四元数可以表示一个点的位置和方向。
四元数的线性插值可以实现平滑的空间移动。
总的来说,四元数是一种非常强大的数学工具,在物理学中有着广泛的应用。
它们可以用于描述旋转、方向和空间位置等物理量,帮助研究人员解决许多复杂的问题。
- 1 -。
四元数的物理含义
四元数是一种数学概念,可以用来描述旋转、转动等物理现象。
在物理学中,四元数的应用非常广泛,特别是在机器人控制、航空航天、计算机图形学等领域。
四元数可以看作是三维空间中的一个向量和一个实数的组合。
它可以用来描述空间中的旋转,其实际含义是描述一个旋转轴及旋转角度。
通过四元数可以方便地进行旋转操作,避免了矩阵计算的复杂性和误差累积的问题。
在机器人控制中,四元数可以用来描述机器人的姿态。
通过四元数可以方便地实现机器人的姿态控制,使机器人可以快速准确地执行各种任务。
在航空航天中,四元数可以被用来描述飞行器的姿态。
通过四元数可以实现飞行器的控制和导航,确保其运动的准确性和稳定性。
在计算机图形学中,四元数可以用来描述物体的旋转、旋转轴及旋转角度。
通过四元数可以实现三维物体的旋转和动画效果,使其具有更加生动逼真的表现。
总之,四元数在物理学中的应用非常广泛,可以方便地描述空间中的旋转、转动等物理现象,为机器人控制、航空航天、计算机图形学等领域的发展做出了重要贡献。
- 1 -。
四元数与三维空间中的旋转四元数(quaternion)是一种数学结构,常用于表示三维空间中的旋转。
与欧拉角和旋转矩阵相比,四元数具有许多优点,包括无奇异性、紧凑性和快速计算等。
本文将介绍四元数的基本概念以及在三维空间中旋转的应用。
### 四元数的定义四元数通常表示为$q = w + xi + yj + zk$,其中$w$、$x$、$y$、$z$分别为实部和三个虚部。
四元数的加法和乘法定义如下:- 加法:$q_1 + q_2 = (w_1 + w_2) + (x_1 + x_2)i + (y_1 + y_2)j +(z_1 + z_2)k$- 乘法:$q_1 \cdot q_2 = (w_1w_2 - x_1x_2 - y_1y_2 - z_1z_2) +(w_1x_2 + x_1w_2 + y_1z_2 - z_1y_2)i + (w_1y_2 - x_1z_2 + y_1w_2 +z_1x_2)j + (w_1z_2 + x_1y_2 - y_1x_2 + z_1w_2)k$四元数还具有共轭、模长和归一化等操作,这些操作在旋转计算中非常有用。
### 四元数表示旋转在三维空间中,一个旋转可以由一个单位四元数表示。
对于一个单位四元数$q = cos(\theta/2) + sin(\theta/2)(ix + jy + kz)$,其代表了绕着以$(x, y, z)$为轴旋转$\theta$弧度。
通过四元数乘法,可以将多次旋转连续表示为一个四元数。
### 从四元数到旋转矩阵四元数和旋转矩阵之间存在一一对应的关系。
通过将四元数转换为旋转矩阵,可以方便地在计算机图形学和机器人学等领域中使用。
四元数转换为旋转矩阵的公式如下:$R = \begin{bmatrix}1 - 2(y^2 + z^2) & 2(xy - wz) & 2(xz + wy) \\2(xy + wz) & 1 - 2(x^2 + z^2) & 2(yz - wx) \\2(xz - wy) & 2(yz + wx) & 1 - 2(x^2 + y^2)\end{bmatrix}$### 应用示例四元数在计算机图形学、虚拟现实与增强现实、游戏开发等领域有着广泛的应用。
一、概述近年来,随着人工智能、机器学习和深度学习等领域的迅速发展,对于四元数的应用和研究也日益受到关注。
四元数作为一种超复数,具有较强的表达能力和运算能力,在计算机图形学、航天航空、机器人领域等有着广泛的应用。
在Python中,numpy作为一个功能强大的数值计算库,也提供了对四元数的支持,包括四元数的构造、运算以及应用等方面。
本文将重点介绍numpy如何计算四元数的夹角。
二、四元数简介1. 四元数的定义及表示四元数是由一个实部和三个虚部组成的超复数,通常表示为q = a + bi + cj + dk,其中a、b、c、d分别为实数,i、j、k为虚数单位,满足i^2=j^2=k^2=ijk=-1。
2. 四元数的性质四元数具有加法和乘法的运算规则,而且乘法不满足交换律,即q1*q2≠q2*q1。
四元数还具有共轭、模、逆等运算。
三、numpy计算四元数的夹角1. 四元数的夹角定义对于两个四元数q1和q2,它们的夹角θ定义为arccos(q1*q2.conjugate()/(|q1|*|q2|)),其中*表示四元数的乘积运算,conjugate()表示共轭运算,|q|表示四元数的模。
2. numpy实现夹角计算在numpy中,可以使用Quaternion类进行四元数的表示和运算。
首先需要创建两个四元数q1和q2,然后利用公式计算它们的夹角。
具体代码如下所示:import numpy as npfrom numpy_quaternion import Quaternionq1 = Quaternion(1, 2, 3, 4)q2 = Quaternion(5, 6, 7, 8)angle = np.arccos(np.dot(q1, q2.conjugate()) /(np.linalg.norm(q1) * np.linalg.norm(q2)))以上代码中,首先使用numpy_quaternion库中的Quaternion 类构造了两个四元数q1和q2,然后利用numpy中的dot函数计算了它们的乘积,使用linalg.norm函数计算了它们的模,最后利用arccos函数计算了它们的夹角。
欧拉角和四元数
欧拉角和四元数是用于描述物体旋转的两种常见方式。
下面将介绍它
们各自的定义、优缺点以及在不同应用领域中的应用。
欧拉角:
1. 定义
欧拉角是用三个角度表示一个物体在三维空间中的旋转状态。
包括绕x 轴旋转的角度(俯仰角)、绕y轴旋转的角度(偏航角)和绕z轴旋转的角度(翻滚角)。
这三个角度的定义顺序和参考系的选择有关。
2. 优缺点
优点:欧拉角可以直观地描述物体的旋转状态,并且易于理解和计算。
缺点:欧拉角存在万向锁(Gimbal Lock)问题,即在某些情况下,两
个欧拉角的变化会产生相同的旋转效果,从而导致无法精确控制。
3. 应用
欧拉角在游戏、机器人、电影等领域中广泛应用,例如游戏中玩家角
色的旋转、机器人的运动控制以及电影中的特效制作。
四元数:
1. 定义
四元数是一种超复数,可以表示物体在三维空间中的旋转状态。
四元数包括一个实部和三个虚部,分别对应于物体旋转的三个自由度。
2. 优缺点
优点:四元数可以避免欧拉角的万向锁问题,并且用于物体旋转的计算速度更快。
缺点:四元数较难理解和计算,需要进行复杂的数学运算。
3. 应用
四元数在航天、虚拟现实、动画制作等领域中广泛应用,例如火箭的导航控制、虚拟现实中物体的旋转和动画中角色的动作等。
总结:
欧拉角和四元数都是用于描述物体旋转状态的方式,各自具有优缺点并应用于不同的领域中。
选择哪种方式主要取决于具体应用的需求和难度。
四元数三维向量一、引言1.1 任务背景四元数和三维向量是计算机图形学和物理引擎等领域中常用的数学工具。
它们在旋转、变换和表示空间位置等方面发挥着重要的作用。
本文将深入探讨四元数和三维向量的概念、性质以及它们在实际应用中的使用方法。
1.2 文章结构本文将分为以下几个部分进行讨论:1.二、四元数2.三、三维向量3.四、四元数与三维向量的关系4.五、应用实例二、四元数2.1 概念四元数是一种扩展了复数的数学结构。
它由一个实部和三个虚部组成,可以表示为q = a + bi + cj + dk,其中a、b、c、d为实数,i、j、k为虚数单位,满足以下性质:•i² = j² = k² = ijk = -12.2 性质四元数具有以下性质:1.四元数的加法和减法满足交换律和结合律;2.四元数的乘法满足结合律,但不满足交换律;3.四元数的乘法满足分配律;4.四元数可以表示旋转、变换和插值等操作。
2.3 四元数的应用四元数在计算机图形学和物理引擎中有广泛的应用,例如:1.旋转表示:四元数可以用来表示物体的旋转,通过乘法和加法操作可以实现旋转的组合和插值;2.插值运算:四元数可以用来实现平滑的插值运算,例如在动画和相机路径等场景中;3.姿态控制:四元数可以用来表示物体的姿态,通过四元数的乘法可以实现姿态的组合和变换。
三、三维向量3.1 概念三维向量是指在三维空间中具有大小和方向的量。
它可以表示为v = [x, y, z],其中x、y、z为实数,分别表示在x轴、y轴和z轴上的分量。
3.2 性质三维向量具有以下性质:1.三维向量的加法和减法满足交换律和结合律;2.三维向量的乘法满足分配律;3.三维向量可以表示位移、速度和加速度等物理量。
3.3 三维向量的应用三维向量在计算机图形学和物理引擎中也有广泛的应用,例如:1.位移表示:三维向量可以用来表示物体的位移,通过向量的加法和乘法可以实现位移的组合和变换;2.碰撞检测:三维向量可以用来表示物体的位置和速度,通过向量的运算可以实现碰撞检测和碰撞响应;3.物理模拟:三维向量可以用来表示物体的速度和加速度,通过向量的运算可以实现物体的运动模拟。