turtlebot硬件安装手册
- 格式:pdf
- 大小:50.92 MB
- 文档页数:9
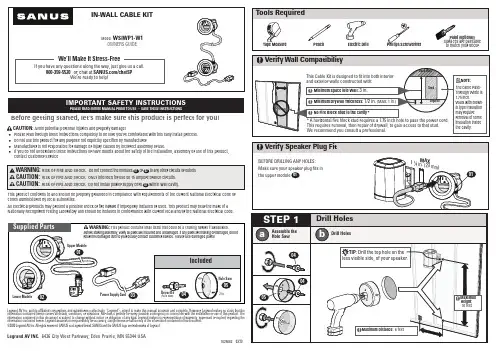
IMPORTANT SAFETY INSTRUCTIONSPLEASE READ ENTIRE MANUAL PRIOR TO USE – SAVE THESE INSTRUCTIONSCAUTION: Avoid potential personal injuries and property damage!●Please read through these instructions completely to be sure you’re comfortable with this easy install process. ●Do not use this product for any purpose not explicitly specified by manufacturer.●Manufacturer is not responsible for damage or injury caused by incorrect assembly or use.●If you do not understand these instructions or have doubts about the safety of the installation, assembly or use of this product, contact Customer ServiceThis product conforms to and should be properly grounded in compliance with requirements of the current National Electrical Code or codes administered by local authorities.All electrical products may present a possible shock or fire hazard if improperly installed or used. This product may bear the mark of a Nationally Recognized Testing Laboratory and should be installed in conformance with current local and/or the National Electrical Code.Legrand AV Inc. and its affiliated corporations and subsidiaries (collectively, “Legrand”), intend to make this manual accurate and complete. However, Legrand makes no claim that the information contained herein covers all details, conditions, or variations. Nor does it provide for every possible contingency in connection with the installation or use of this product. The information contained in this document is subject to change without notice or obligation of any kind. Legrand makes no representation of warranty, expressed or implied, regarding the information contained herein. Legrand assumes no responsibility for accuracy, completeness or sufficiency of the information contained in this document.©2020 Legrand AV Inc. All rights reserved. SANUS is a Legrand brand. SANUS and the SANUS logo are trademarks of Legrand.Legrand AV INC. 6436 City West Parkway; Eden Prairie, MN 55344 USA1025682 03/20Before getting started, let’s make sure this product is perfect for you!Replace Trim Plate。
Dobot视觉套件安装指南文档版本:V1.0发布日期:2018-09-12深圳市越疆科技有限公司版权所有©越疆科技有限公司2019。
保留一切权利。
非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
免责申明在法律允许的最大范围内,本手册所描述的产品(含其硬件、软件、固件等)均“按照现状”提供,可能存在瑕疵、错误或故障,越疆不提供任何形式的明示或默示保证,包括但不限于适销性、质量满意度、适合特定目的、不侵犯第三方权利等保证;亦不对使用本手册或使用本公司产品导致的任何特殊、附带、偶然或间接的损害进行赔偿。
在使用本产品前详细阅读本使用手册及网上发布的相关技术文档并了解相关信息,确保在充分了解机器人及其相关知识的前提下使用机械臂。
越疆建议您在专业人员的指导下使用本手册。
该手册所包含的所有安全方面的信息都不得视为Dobot的保证,即便遵循本手册及相关说明,使用过程中造成的危害或损失依然有可能发生。
本产品的使用者有责任确保遵循相关国家的切实可行的法律法规,确保在越疆机械臂的使用中不存在任何重大危险。
越疆科技有限公司地址:深圳市南山区留仙大道3370号南山智园崇文区2号楼9-10楼网址:/目的本手册介绍了Dobot视觉套件说明和安装指南,方便用户了解和使用。
读者对象本手册适用于:•客户工程师•销售工程师•安装调测工程师•技术支持工程师修订记录符号约定在本手册中可能出现下列标志,它们所代表的含义如下。
危险警告注意说明1. 视觉套件说明 (1)概述 (1)1.2视觉套件清单 (1)1.3相机参数说明 (1)1.4光源参数说明 (2)1.5相机镜头参数 (3)2. 安装指南 (4)安装相机 (4)安装Dobot Magician (13)安装Dobot M1 (13)1. 视觉套件说明概述图像处理系统通过设置图像(视觉套件获取)的色度(Hue)、饱和度(Saturation)、亮度(V alue)、特征大小来提取图像的特征,并把图像坐标转换成机械臂坐标传送给机械臂,利用机械臂完成智能分拣。
Turtlebot3+ubuntu20.04+ROSnoetic环境搭建使⽤turtlebot3 burger进⾏实验,PC机已经安装好了ubuntu20.04环境PC端安装ROS noetic安装源sudo sh -c 'echo "deb /ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'增加keysudo apt-key adv --keyserver 'hkp://:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654更新sudo apt update安装sudo apt install ros-noetic-desktop-full环境设置source /opt/ros/noetic/setup.bash安装相关ROS依赖包sudo apt-get install ros-noetic-joy ros-noetic-teleop-twist-joy \ros-noetic-teleop-twist-keyboard ros-noetic-laser-proc \ros-noetic-rgbd-launch ros-noetic-rosserial-arduino \ros-noetic-rosserial-python ros-noetic-rosserial-client \ros-noetic-rosserial-msgs ros-noetic-amcl ros-noetic-map-server \ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro \ros-noetic-compressed-image-transport ros-noetic-rqt* ros-noetic-rviz \ros-noetic-gmapping ros-noetic-navigation ros-noetic-interactive-markers安装turtlebot3软件包sudo apt install ros-noetic-dynamixel-sdksudo apt install ros-noetic-turtlebot3-msgssudo apt install ros-noetic-turtlebot3树莓派环境安装使⽤SD Card Formatter格式化SD卡使⽤Raspberry Pi Image导⼊ubuntu系统⽂件解决⿏标延迟电脑打开安装树莓派系统的TF卡,在根⽬录下找到cmdline.txt⽂件,打开编辑,在第⼀⾏的最后输⼊⼀个空格,添加⼊:usbhid.mousepoll=0使⽤HDMI和显⽰屏,安装系统ubuntu20.04系统(会⽐较慢,像是卡住,需要耐⼼等待)启⽤sshsudo ps -e | grep ssh #检查SSH服务有没有开启sudo apt-get update #先更新源sudo apt-get install openssh-server安装并配置ROS(noetic)环境安装并构建TurtleBot3软件包sudo apt install ros-noetic-rosserial-python ros-noetic-tfsudo apt install ros-noetic-hls-lfcd-lds-driversudo apt install ros-noetic-turtlebot3-msgssudo apt install ros-noetic-dynamixel-sdkcd ~/catkin_ws/src/git clone -b noetic-devel https:///ROBOTIS-GIT/turtlebot3.gitcd ~/catkin_ws/src/turtlebot3rm -r turtlebot3_description/ turtlebot3_teleop/ turtlebot3_navigation/ turtlebot3_slam/ turtlebot3_example/cd ~/catkin_ws && catkin_make -j1source ~/.bashrc使⽤rosdep安装依赖项sudo apt install python3-rosdep2 ros-noetic-rosbashcd ~/catkin_ws && rosdep update && rosdep install --from-paths src --ignore-src -r -yUSB端⼝设定官⽅⽂档操作rosrun turtlebot3_bringup create_udev_rulescd ~/catkin_ws/src/turtlebot3/turtlebot3_bringupsudo cp ./99-turtlebot3-cdc.rules /etc/udev/rules.d/sudo udevadm control --reload-rulessudo udevadm triggeropenCR设置不进⾏这⼀步,后续rosrun会报checksum error,仍然按照官⽅⽂档进⾏,需要注意的是wget https:///ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 在进⾏这⼀步时,会connect refuse,按照⽹上其他改host ip映射也不⾏,于是选择⼿动去下载。
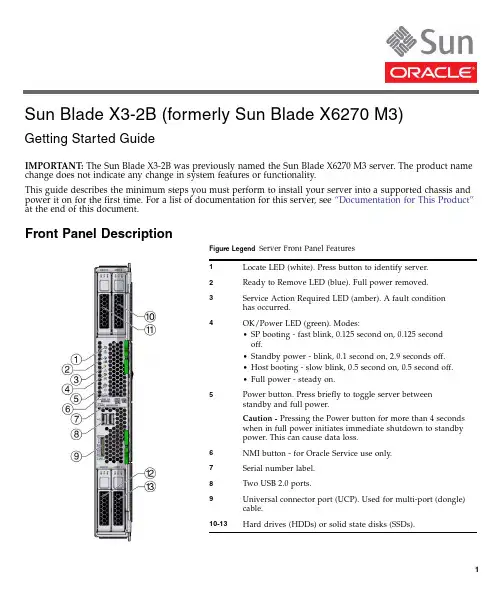
IMPORTANT:The Sun Blade X3-2B was previously named the Sun Blade X6270M3server.The product name change does not indicate any change in system features or functionality.This guide describes the minimum steps you must perform to install your server into a supported chassis and power it on for the first time.For a list of documentation for this server,see “Documentation for This Product”at the end of this document.Front Panel DescriptionFigure Legend Server Front Panel Features1Locate LED (white).Press button to identify server.2Ready to Remove LED (blue).Full power removed.3Service Action Required LED (amber).A fault condition has occurred.4OK/Power LED (green).Modes:•SP booting -fast blink,0.125second on,0.125second off.•Standby power -blink,0.1second on,2.9seconds off.•Host booting -slow blink,0.5second on,0.5second off.•Full power -steady on.5Power button.Press briefly to toggle server between standby and full power.Caution -Pressing the Power button for more than 4seconds when in full power initiates immediate shutdown to standby power.This can cause data loss.6NMI button -for Oracle Service use only.7Serial number label.8Two USB 2.0ports.9Universal connector port (UCP).Used for multi-port (dongle)cable.10-13Hard drives (HDDs)or solid state disks (SSDs).Sun Blade X3-2B (formerly Sun Blade X6270 M3)Getting Started GuideBasic Installation TasksThe following tasks describe the basic installation process for the server.For detailed installation information, see the Sun Blade X3-2B Server Installation Guide.▼Review Safety InformationBefore performing an installation,refer to the Safety and Compliance Guide(online)and the Important Safety Information for Sun Hardware System s(in the system accessory kit).▼Review Supported Hardware and Software and Identify Known IssuesReview the Sun Blade X3-2B Product Notes for information on supported software and hardware and any known issues for the server.▼Install Optional ComponentsOptional server components(for example,DIMMs or hard drives)might be packaged and shipped separately. Install these components prior to installing the server into the system chassis.For component installation procedures,refer to the Sun Blade X3-2B Service Manual.▼Insert the Server Into a Chassis1.Verify that the Sun Blade6000modular system chassis is powered on.2.Make sure that the fans are operating and the OK/Power LED illuminates a steady-on green light.If an amber service LED is illuminated on any chassis components,refer to the Sun Blade X3-2B Service Manual for information on how to identify and correct the faults.3.At the front of the chassis,locate the slot that you want to install the server in and remove the filler panel.To unlock the filler panel,squeeze the release levers on the end of filler panel ejector arm.To eject the filler panel,rotate the lever fully outward.To remove the filler panel,pull it out of the chassis.Caution–Thermal over-temperature.Do not operate the chassis with empty slots for more than60seconds.Always insert a filler panel into an empty slot to reduce the possibility of chassis shutdown.If you are not installing a server into a slot,do not remove the slot filler panel.4.Open both of the server ejector levers,and position the server vertically so that the ejectors are on theright.To unlock the ejector levers,squeeze the lock latches located on the end of the ejector levers.5.Carefully,slide the server into the slot until the server stops(see1).6.To completely seat the server in the chassis,rotate both ejector levers inward until the levers lock intoplace and are flush with the face of the server.(see2).Standby power is applied to the server and the service processor(SP)boots.As the SP boots,the OK/Power LED blinks rapidly(125ms on,125ms off).Note–The SP can take several minutes to boot.7.Verify that the SP has finished booting and that the server has successfully powered-on to standby mode.When the server is in standby mode,the OK/Power LED blinks slowly(0.1second on and2.9seconds off).Note–If the chassis power is insufficient,the server OK/Power LED remains off.For information on troubleshooting LED states,refer to the Sun Blade X3-2B Service Manual.▼Set Up Software and Firmware Using Oracle System AssistantThis is the easiest method for setting up the server.If Oracle System Assistant is included with the server,you can use it to update to the latest available firmware and software,configure key server settings,and install a supported operating system.For more information,refer to the server’s OS-specific installation guide.Note–You can also use Oracle ILOM and Oracle Hardware Management Pack to set up the server.For more information about these tools,or for information about how to use Oracle System Assistant,refer to the Sun Blade X3-2B Administration Guide.1.Install the server in the chassis,see“Insert the Server Into a Chassis”on page2.2.To access Oracle System Assistant,set up a local connection to the server by attaching the multi-port cableto the server’s universal connector port(UCP)and do the following:■Attach the monitor to the video connector on the multi-port cable.■Attach the keyboard and mouse to one of the USB ports on the multi-port cable.Note–You can also access Oracle System Assistant by using Oracle ILOM.Refer to the instructions in the Sun Blade X3-2B Administration Guide.3.Press the power button on the server front panel.Full power is appled to the server.The server boots and POST messages appear on the monitor.4.Watch the screen and when the Oracle System Assistant message appears,press the F9key.The Oracle System Assistant application boots and the main screen appears.e Oracle System Assistant to perform the following ordered tasks:6.(Optional)Connect to Oracle ILOM.If you want to use Oracle ILOM to perform server management tasks,you can connect either through the Oracle ILOM CMM or the server SP.For instructions on connecting to ILOM,refer to the Sun Blade X3-2B Installation Guide .▼Set Up an Operating System and DriversThe following table provides additional options for installing or configuring an operating system (OS).System tools,drivers,and firmware are accessible using Oracle System Assistant.If you do not have access to Oracle System Assistant,you can download what you need from Oracle.For download procedures,refer to the Sun Blade X3-2B Installation Guide .Service and Technical SupportIf your system requires service,you might need to supply your hardware serial number.The server serial number is on the front of the server.You can also use the Oracle ILOM web interface,the Oracle ILOMcommand-line interface (use the command:show /SYS),or Oracle System Assistant to get the server serial number.For service and technical support,go to:/us/support/contact-068555.htmlStepTaskOracle System Assistant Screen1Set up Oracle System Assistant network connection.Configure Network 2Get software and firmware updates.Get Updates 3Update Oracle ILOM,BIOS,disk expander,or host bus adapter (HBA)firmware.Update Firmware4Configure Oracle ILOM.Configure Hardware >Service Processor Configuration 5Configure RAID.Configure Hardware >RAID Configuration6Install Linux or Windows operating system (OS)or Oracle VM software.Install OSFor information on installing other operating systems,see “Set Up an Operating System and Drivers”on page 5.What do you want to do?Which OS do you want to configure or install?Use this tool or documentationConfigure a preinstalled OS Solaris OS or Oracle VMSun Blade X3-2B Installation Guide Install an OSOracle VM,Windows or Linux OS Oracle System Assistant Solaris OS or VMware ESXInstallation Guide for the OS Install OS drivers Any supported OSInstallation Guide for the OSDocumentation for This ProductThe following table lists the order of the tasks that you might perform when installing a new system andprovides the title of the relevant document.This documentation is available with Oracle System Assistant,but the most up-to-date documents,including translations of some documents,are available at:/pls/topic/lookup?ctx=SunBladeX3-2BFrom the web site,you can select your language for available translated versions of the documentation.Documentation CommentsOracle is interested in improving the product documentation and welcomes your comments and suggestions.You can submit comments by going to this link:/goto/docfeedbackTasksDocument TypeReview safety information.Safety and Compliance GuideImportant Safety Information for Sun Hardware SystemsReview any known issues and workarounds.Product Notes Cable and power on the server.Connect to service processor and configure network settings.Installation GuideInstall and configure supported operating systems.Refer to the appropriate OS installation guide for the OS that you want to install.Update firmware,monitor alerts,set remote access and redirection,and view component status and event logs.Oracle ILOM 3.1Documentation Library Remove and replace hardware components,troubleshoot and isolate server problems.Service ManualOracle x86Server Diagnostics Guide Perform server administration tasks and view server-specific ILOM information.Administration GuideCopyright ©2012,Oracle and/or its affiliates.All rights reserved.Copyright ©2012,Oracle et/ou ses affiliés.Tous droits réservés..Part No.: E20883-02Mfg No.: 7052903July 2012Y ou can scan the Quick Response (QR) code with your mobile device to go to the product documentation.。
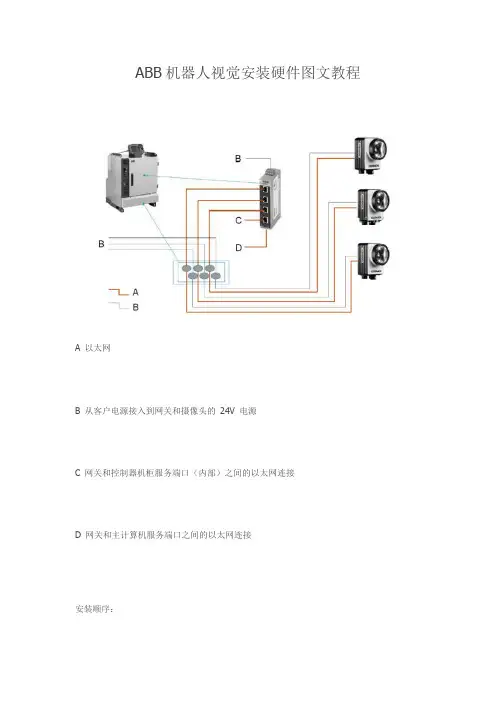
ABB机器人视觉安装硬件图文教程
A 以太网
B 从客户电源接入到网关和摄像头的24V 电源
C 网关和控制器机柜服务端口(内部)之间的以太网连接
D 网关和主计算机服务端口之间的以太网连接
安装顺序:
如图连接下列部件和线缆。
操作
1 确保控制器电源开关已经关闭。
将Ethernet 电缆从控制器机柜服务端口(内部)连接到交换机上四个Ethernet 接口中的一个。
2
通过控制器机柜上的电缆密封套将Ethernet 电缆从每个摄像头连接到交换机上的任何可用的Ethernet 接口。
3
小心地剥掉20 毫米绝缘,将电缆捆扎在电缆密封套上的接地片上。
4 通过控制器机柜上的电缆密封套将24 VDC电源电缆从每个摄像头连接到24 VDC电源。
小心地剥掉20 毫米绝缘,将电缆捆扎在电缆密封套上的接地片上。
![ABB机器人操作手册(中文版)[2]](https://uimg.taocdn.com/984ca381fc0a79563c1ec5da50e2524de518d098.webp)
ABB机器人操作手册(中文版)MODULE ModuleNamePROC ProcedureNameStatement1;Statement2;...ENDPROC...ENDMODULE/ This is a single line comment/+ This is amulti-line comment +/num a := 10; / Assign 10 to variable aMoveL p1,v100,z10,tool0; / Assign parameters to MoveL instructionMoveL p1,v100,z10,tool0; / Move linearly to position p1 with velocity v100, zone z10 and tool tool0MoveJ p2,v50,fine,tool0; / Move joint to position p2 with velocity v50, zone fine and tool tool0MoveC p3,p4,v75,z5,tool0; / Move circularly from position p3 to position p4 with velocity v75, zone z5 and tool tool0 IF condition THEN / If condition is true, then execute statement1Statement1;ELSE / If condition is false, then execute statement2Statement2;ENDIFWHILE condition DO / While condition is true, repeat statementStatement;ENDWHILEFOR num i FROM 1 TO 10 DO / For i from 1 to 10, repeat statementStatement;ENDFORnum x := Sin(30); / Assign the sine of 30 degrees to variable xnum y := Add(10,20); / Assign the result of adding 10 and 20 to variable yABB操作手册(中文版)概述ABB是一种先进的工业,可以用于各种制造、物流、服务等领域的自动化应用。
焊机信号连接线通信控制器信号连接线CAN 总线机器人控制柜CAN总线图 1硬件配置需要注意的是,通信控制盒上可以选择通信ID 和波特率,ID 可以由用户自由选择,但是波特率必须转动到,然后在软件配置中需要配置与控制盒相同的ID 与波特率,如图 2所示,号选择为9,波特率选择为52上方的Baud Rate 列表可知控制盒的波特率为500 kbps 。
123设备,填写与奥泰通信控制盒所显示波特率数值(设备,在右边的界面点击CANopen I/O21213设备,填写奥泰通信控制盒所显示节点ID数值(具体数值说明见第一章)CANopen I/O映射,勾选“始终更新变量”;21122.3.2 Codesys工程自主配置工程配置主要包含添加库,设备,变量和程序,以及任务,具体操作如下:Codesys的库里面添加Step_ARC库:123单击新生成的CANbus设备,在添加设备界面中,双击选择“CANopen_Manager 同样的单击新生成的CANopen_Manager 设备,在添加设备界面中,双击选择123添加完毕后的设备如下:右键单击“Application”,选择“添加对象”—“程序组织单元”,在添加程序组织单元界123右键单击“任务配置”,选择“添加对象”—“任务…”,在添加任务界面中,填写名称为AWTest,然后双击生成的AWTest任务,修改优先级为2,间隔为t#20ms,单击“Add Call AWTest程序文件添加到该任务中:123 4CANbus设备,填写与奥泰通信控制盒所显示波特率数值(500000),双击CANOpen_Manager设备,在右边的界面点击CANopen I/O映射,选择总线循环任务为AWTest;21213设备,填写奥泰通信控制盒所显示节点ID数值(具体数值说明见第一章)I/O映射”选项完成输出映射,下拉滚动条,完成输入映射,并勾选始终更2113 212。
基于树莓派的TURTLEBOT路径设计和传感器连接作者:黄宏州郑博陈亿黄根陈杰来源:《电脑知识与技术》2018年第30期摘要:本文介绍了基于树莓派的ROS机器人系统的路径设计与地图构建,通过各类传感器,能够得到外界各类环境的数据。
利用SLAM技术实现机器人的移动和巡游功能。
并展开了速度测试,实验结果表明,该移动机器人系统设计方案可行,能够远程控制机器人进行精确移动,还具有性能高可扩展等特点。
关键词:树莓派;ROS系统;SALM;传感器中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2018)30-0028-021 绪论机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多门学科而形成的高新技术,本文所谈机器人为TurtleBot。
该项目旨在解决灾后救援过程中由于环境恶劣并且救援人员不能保证自身的安全的情况下和预防事故出现而设计的环境侦察机器人。
该机器人能够实现通过无线控制进行远程环境图像采集、环境气体检测、环境温度检测、运送急救物品等,并且可以将收集到的信息返回给控制端,为增加操作方便性,该机器人的控制端分为web控制端和手机APP端。
2 危险环境侦查机器人总体设计本项目基于ROS操作系统的机器人平台,以树莓派为操作核心,结合各种传感器技术以及SLAM算法来实现多功能、强适应、环境监测能力的侦察机器人。
完善的项目成品将具有多种环境监测如环境温度、湿度、气体、热源感应等方面的能力,能够在化工厂事故、火灾事故等情况下进入现场取得反馈,也能够在各种容易发生火灾或者核生化污染事故的地区进行监测,可以大大减少人员伤亡以及事故发生概率。
该项目旨在解决灾后救援过程中由于环境恶劣并且救援人员不能保证自身的安全的情况下和预防事故出现而设计的环境侦察机器人。
为增加操作方便性,该机器人的控制端分为web控制端和手机APP端。
第一、机器人具有在室内和室外可以自主地感知外界的环境的功能,因此树莓派上安装了能够感知外界环境的各种传感器。
t e r y o u rn e w d e v i c eo nM y B o s c h no w a n dg e t f r e e b en e f i t s:b o sc h-h o me.c o m/w e l c o m e Warming drawerBIC510N.0BID510N.0[en]User manual and installation instructionsen Safety2Table of contentsINFORMATION FOR USE 1Safety.................................................................... 22Preventing material damage ............................... 33Environmental protection and saving en-ergy....................................................................... 34Familiarising yourself with your appliance........ 45Before using for the first time............................. 46Tableware............................................................. 47Basic operation.................................................... 58Preheating tableware........................................... 59Keeping food warm.............................................. 510Cleaning and servicing........................................ 611Troubleshooting................................................... 612How it works......................................................... 713Customer Service. (814)INSTALLATION INSTRUCTIONS (9)14.4Safe installation .................................................101 SafetyObserve the following safety instructions.1.1 General information¡Read this instruction manual carefully.¡Keep the instruction manual and the product information safe for future refer-ence or for the next owner.¡Do not connect the appliance if it has been damaged in transit.1.2 Intended useThis appliance is designed only to be built into kitchen units. Read the special installation instructions.Only a licensed professional may connect ap-pliances without plugs. Damage caused by in-correct connection is not covered under the warranty.Only use this appliance:¡To keep food warm and to warm cookware.¡In private households and in enclosed spaces in a domestic environment.¡Up to an altitude of max. 4000 m abovesea level.Do not use the appliance:¡On boats or in vehicles.¡with an external timer or a remote control.1.3 Restriction on user groupThis appliance may be used by children aged 8 or over and by people who have reduced physical, sensory or mental abilities or inad-equate experience and/or knowledge,provided that they are supervised or have been instructed on how to use the appliance safely and have understood the resulting dangers.Do not let children play with the appliance.Children must not perform cleaning or user maintenance unless they are at least 15 years old and are being supervised.Keep children under the age of 8 years away from the appliance and power cable.1.4 Safe useWARNING ‒ Risk of fire!The inside of the appliance gets very hot and may cause flammable materials to ignite.▶Never place flammable objects or plasticcontainers in the appliance.WARNING ‒ Risk of burns!The accessories and cookware become very hot during operation.▶Always use oven gloves when removing hot accessories or cookware from the ap-pliance.The inside of the appliance becomes very hot during operation.▶Never touch the inside of the appliance while it is hot.▶Keep children away from the appliance.The appliance becomes hot during operation.▶Allow the appliance to cool down beforecleaning.WARNING ‒ Risk of electric shock!Incorrect repairs are dangerous.▶Repairs to the appliance should only be carried out by trained specialist staff.▶Only use genuine spare parts when repair-ing the appliance.▶If the power cord of this appliance is dam-aged, it must be replaced by trained spe-cialist staff.Preventing material damage en3If the insulation of the power cord is dam-aged, this is dangerous.▶Never let the power cord come into contact with hot appliance parts or heat sources.▶Never let the power cord come into contact with sharp points or edges.▶Never kink, crush or modify the power cord.An ingress of moisture can cause an electric shock.▶Do not use steam- or high-pressure clean-ers to clean the appliance.If the appliance or the power cord is dam-aged, this is dangerous.▶Never operate a damaged appliance.▶Never pull on the power cord to unplug the appliance. Always unplug the appliance at the mains.▶If the appliance or the power cord is dam-aged, immediately unplug the power cord or switch off the fuse in the fuse box.▶Call customer services. →Page 8WARNING ‒ Risk of suffocation!Children may put packaging material over their heads or wrap themselves up in it and suffocate.▶Keep packaging material away from chil-dren.▶Do not let children play with packaging ma-terial.Children may breathe in or swallow small parts, causing them to suffocate.▶Keep small parts away from children.▶Do not let children play with small parts.2 Preventing material damageATTENTION!Excessive weight may damage the appliance.▶The appliance has a maximum load capacity of 15 kg.Moisture may damage the appliance.▶Do not use the appliance to store food and drinks.The humidity of the food may cause corrosion dam-age.3 Environmental protection and saving energy3.1 Disposing of packagingThe packaging materials are environmentally compat-ible and can be recycled.▶Sort the individual components by type and dispose of them separately.en Familiarising yourself with your appliance44 Familiarising yourself with your appliance4.1 ApplianceYou can find an overview of the parts of your appliance here.4.2 ControlsYou can use the control panel to configure all functions of your appliance and to obtain information about the 5 Before using for the first timeConfigure the settings for initial start-up. Clean the ap-pliance and accessories.5.1 Cleaning and heating up the appliance before using it for the first time1.Clean the appliance.2.Remove the accessories.3.Heat up the appliance at 80 °C for one hour.a Smoke development and odour development arenormal.6 TablewareThese instructions help you to avoid damaging your tableware.6.1 Suitable tablewareThe warming drawer has a maximum load capacity of 15 kg. You can use it to preheat the place settings for 6 or 12 people, for example.Drawer – 14 cm Drawer – 29 cm 6 dinner plates 24 cm diameter 12 dinner plates 24 cm diameter 6 soup bowls 10 cm diameter 12 soup bowls 10 cm diameter 1 bowl 19 cm diameter 1 bowl 22 cm diameter 1 bowl17 cm diameter 1 bowl 19 cm diameter 1 meat platter32 cm1 bowl17 cm diameter 2 meat platters32 cmBasic operation en57 Basic operation7.1 Opening the appliance▶Press on the centre of the warming drawer.a The warming drawer pops open and can be pulledout.7.2 Closing the appliance▶Press on the centre of the warming drawer andpush it back in.7.3 Switching on the appliance▶Press .7.4 Switching off the appliance▶Press .7.5 Setting the temperature▶Set the temperature to any value between,and .8 Preheating tablewareFood does not cool down as quickly on preheated tableware. Drinks also remain warm for longer.8.1 Starting the "Preheat tableware"functionWARNING ‒ Risk of burns!Drinking vessels become very hot at high temperat-ures.▶For drinking vessels, set the settings to.1.Place an anti-slip mat at the bottom of the drawer toprevent the tableware scratching the interior surface of the drawer.2.Place the tableware in the warming drawer.‒Distribute the tableware across the entire bottom of the warming drawer to reduce the preheating time.Do not block the ventilation opening with tall items of tableware or stacks of plates. Keeping the ventila-tion opening clear ensures that hot air can circulate efficiently.3.Turn the temperature selector to set the requiredtemperature.A setting of up to is suitable for tableware. For drinking vessels, the settings from to are suitable.4.Switch on the appliance.a The operation indicator lights up, the applianceheats up and the fan runs.5.Close the warming drawer.Note: The preheating time depends on the material,thickness, quantity and distribution of the tableware.For place settings for 6 people, the preheating time is approx. 15-25 minutes.8.2 Ending the "Preheat cookware" functionWARNING ‒ Risk of burns!The accessories and/or cookware become very hot during operation.▶Always use oven gloves to remove accessories or cookware from the cooking compartment.1.Open the warming drawer.2.Switch off the appliance.3.Remove the cookware.9 Keeping food warmYou can use the warming drawer to keep food warm for a certain period of time.We advise against keeping food warm for longer than an hour. Suitable food includes meat, poultry, fish,sauces, vegetables, side dishes and soups.9.1 Starting the "Keep food warm" functionATTENTION!Hot cookware from the hob damages the anti-slip mat in the warming drawer.▶Never take hot pots and pans off the hob and place them directly on the anti-slip mat.1.Place an anti-slip mat at the bottom of the drawer toprevent the tableware scratching the interior surface of the drawer.The anti-slip mat is food-safe. Dry food can be heated directly on the anti-slip mat in the warming drawer. The anti-slip mat must then be cleaned.2.Place the tableware in the warming drawer.3.Turn the temperature selector to set the required temperature.4.Switch on the appliance.a The operation indicator lights up, the appliance heats up and the fan runs.5.Preheat the tableware for approx. 10 minutes.6.Place food into the preheated tableware.‒Do not completely fill the tableware with food to prevent any content from spilling out when you open and close the warming drawer.‒Cover food which dries out easily with a heat-res-istant lid or aluminium foil.7.Close the warming drawer.en Cleaning and servicing69.2 Ending the "Keep food warm" functionWARNING ‒ Risk of burns!The accessories and/or cookware become very hot during operation.▶Always use oven gloves to remove accessories or cookware from the cooking compartment.1.Open the warming drawer.2.Switch off the appliance.3.Remove the cookware.10 Cleaning and servicingTo keep your appliance working efficiently for a long time, it is important to clean and maintain it carefully.10.1 Cleaning productsYou can obtain suitable cleaning products from after-sales service or the online shop.ATTENTION!Unsuitable cleaning products may damage the sur-faces of the appliance.▶Do not use harsh or abrasive detergents.▶Do not use cleaning products with a high alcohol content.▶Do not use hard scouring pads or cleaning sponges.▶Only use glass cleaners, glass scrapers or stainless steel care products if recommended in the cleaning instructions for the relevant part.▶Wash sponge cloths thoroughly before use.10.2 Cleaning the applianceWARNING ‒ Risk of electric shock!An ingress of moisture can cause an electric shock.▶Do not use steam- or high-pressure cleaners toclean the appliance.WARNING ‒ Risk of burns!The appliance becomes hot during operation.▶Allow the appliance to cool down before cleaning.Requirement: The appliance is switched off.1.Clean the appliance with a damp cloth and a neutral cleaning agent, such as washing-up liquid and wa-ter.2.Dry with a soft cloth.10.3 Cleaning the stainless steel surfaces1.Always remove limescale, grease, starch or albuminstains immediately.Corrosion may form under such stains.2.Clean with water and some washing-up liquid.3.Dry with a soft cloth.10.4 Cleaning the glass front▶Clean the glass front using a glass cleaning productand a soft cloth.‒Do not use any abrasive sponges that may scratch or any glass scrapers.10.5 Cleaning the anti-slip mat1.Remove the anti-slip mat to clean it.2.Clean the anti-slip mat with washing-up liquid.11 TroubleshootingYou can rectify minor faults on your appliance yourself.Read the troubleshooting information before contactingafter-sales service. This will avoid unnecessary costs.WARNING ‒ Risk of injury!Improper repairs are dangerous.▶Repairs to the appliance should only be carried out by trained specialist staff.▶If the appliance is defective, call Customer Service.WARNING ‒ Risk of electric shock!Incorrect repairs are dangerous.▶Repairs to the appliance should only be carried out by trained specialist staff.▶Only use genuine spare parts when repairing the appliance.▶If the power cord of this appliance is damaged, it must be replaced by trained specialist staff.11.1 MalfunctionsFaultCause and troubleshooting The cookware or food is not heating up.There has been a power cut.▶Check whether the lighting in your kitchen or other appliances are working.The appliance is switched off.▶Switch the appliance on.The warming drawer is not completely closed.▶Close the warming drawer.How it works en7FaultCause and troubleshooting The appliance is not working.The circuit breaker is faulty.▶Check the circuit breaker in the fuse box.The cookware or food does not get warm enough.The cookware or food has not been heated for long enough.▶Heat the cookware or the food for a longer period of time.The warming drawer is not completely closed.▶Close the warming drawer.The warming drawer was open for a long time.▶Close the warming drawer.The warming drawer was not adequately preheated.▶Preheat the warming drawer sufficiently.The ventilation opening has been blocked by tableware.▶Remove tall tableware from the ventilation opening.The operation indic-ator light does not light up.The operation indicator light is defective.▶Call the after-sales service. → "Customer Service", Page 8The fuse in the fuse box has blown.The circuit breaker is faulty.▶Pull out the mains plug.▶Call the after-sales service. → "Customer Service", Page 812 How it worksHere, you can find the ideal settings for various dishes as well as the best accessories and cookware. We have tailored these recommendations to your appliance.12.1 Recommended settingsThe following settings have been specially tested for your appliance.Tableware and drinking vessels DishPreheating thePreheating tableware Level InformationDefrosting frozen foods DishPreheating the Preheating tableware LevelInformationen Customer Service 8Warming DishPreheating thePreheating tableware Level InformationmuffinsKeeping warm DishPreheating thePreheating tableware Level InformationMelting DishPreheating the Preheating tableware LevelInformationProving dough Dish Preheating thePreheating tableware Level Information trays13 Customer ServiceFunction-relevant genuine spare parts according to the corresponding Ecodesign Order can be obtained from Customer Service for a period of at least 10 years from the date on which your appliance was placed on the market within the European Economic Area.Note: Under the terms of the manufacturer's warranty the use of Customer Service is free of charge.Detailed information on the warranty period and terms of warranty in your country is available from our after-sales service, your retailer or on our website.If you contact Customer Service, you will require the product number (E-Nr.) and the production number (FD) of your appliance.The contact details for Customer Service can be found in the enclosed Customer Service directory or on our website.13.1 Product number (E-Nr.) and production number (FD)You can find the product number (E-Nr.) and the pro-duction number (FD) on the appliance's rating plate.You can see the rating plate with these numbers when you open the drawer.Make a note of your appliance's details and the Cus-tomer Service telephone number to find them again quickly.Installation instructions en914 Installation instructionsObserve this information when installing the appliance.14.1 Included with the applianceAfter unpacking all parts, check for any transport dam-age and for completeness of delivery.14 cm29 cm14.2 Installation in the cabinetYou will find the dimensions of the appliance here14 cm29 cm14.3 Instructions for the electrical connectionIn order to safely connect the appliance to the elec-trical system, follow these instructions.¡The appliance must only be connected to a protect-ive contact socket that has been correctly installed.Only a qualified electrician may install a socket or replace the connecting cable, taking the appropriate regulations into account.¡The appliance must only be connected with the power cable provided. Connect the power cable to the back of the appliance.¡Connecting cables with various plug types are avail-able from after-sales service.¡No multi-plugs, multiple connectors or extension leads must be used. Overloading causes a risk of fire.¡If the plug can no longer be reached after the in-stallation, a partition must be provided in the phases in the permanent electrical installation in accord-ance with the installation regulations.en Installation instructions10Follow these safety instructions when in-stalling the appliance.WARNING ‒ Risk of suffocation!Children may put packaging material over their heads or wrap themselves up in it and suffocate.▶Keep packaging material away from chil-dren.▶Do not let children play with packaging ma-terial.WARNING ‒ Risk of electric shock!If the insulation of the power cord is dam-aged, this is dangerous.▶Never let the power cord come into contact with hot appliance parts or heat sources.▶Never let the power cord come into contact with sharp points or edges.▶Never kink, crush or modify the powercord.WARNING ‒ Risk of injury!Sharp-edged parts may be accessible during installation.▶Wear protective gloves.14.5 InstallationFitted unitsThis is where you can find information about safe in-stallation.ATTENTION!Covering the ventilation slots and air intake openings causes the appliance to overheat.▶Do not cover ventilation slots and air intake open-ings.If the appliance is installed behind a decorative panel,this may cause it to overheat.▶Do not install the appliance behind a decorative panel.The built-in unit must not have a rear panel behind the appliance.The minimum distance between the wall and the cab-inet base or back wall of the cabinet that is situated above must be complied with.Observe the installation instructions for the appliance installed above.If no intermediate floor is possible above the appliance or above the oven, install tilt protection for the appli-ance. Suitable tilt protection can be obtained from cus-tomer service, on our website or in the online shop.Installing the applianceWARNING ‒ Risk of electric shock!If the insulation of the power cord is damaged, this is dangerous.▶Never let the power cord come into contact with hot appliance parts or heat sources.▶Never let the power cord come into contact with sharp points or edges.▶Never kink, crush or modify the power cord.WARNING ‒ Risk of injury!After removing the transport lock, the drawer may open suddenly during transport.▶Transport the appliance in such a way that the drawer does not accidentally open.The high weight of the appliance may result in injury when lifted.▶Do not lift the appliance on your own.1.Insert the power cord into a protective contactsocket.The power cord must not touch the rear and base of the appliance after installation.2.Insert the appliance.3.Centre the appliance.4.5.Remove and dispose of the protective padding.Thank you for buying aBosch Home Appliance!Register your new device on MyBosch now and profit directly from:•Expert tips & tricks for your appliance•Warranty extension options•Discounts for accessories & spare-parts•Digital manual and all appliance data at hand•Easy access to Bosch Home Appliances ServiceFree and easy registration – also on mobile phones:/welcomeLooking for help?You'll find it here.Expert advice for your Bosch home appliances, help with problemsor a repair from Bosch experts.Find out everything about the many ways Bosch can support you: /serviceContact data of all countries are listed in the attached service directory.。
turtlebot3使用后总结TurtleBot3是一款小型移动机器人平台,由韩国机器人公司ROBOTIS开发。
它的设计灵感来自于海龟(Turtle)的行动方式,具有简洁、灵活和易于使用的特点。
TurtleBot3可以用于各种应用领域,包括教育、研究和娱乐等。
使用TurtleBot3的过程中,我发现了一些值得总结的经验和教训。
首先,为了确保机器人的正常运行,我们需要正确安装和配置相关软件和硬件。
在安装ROS(Robot Operating System)和TurtleBot3软件包之前,我们应该先检查操作系统的版本和依赖关系。
此外,还需要连接传感器和执行器,并校准它们以确保精确的测量和动作。
在使用TurtleBot3期间,我发现了一些常见的问题和解决方法。
首先是传感器的故障或不准确。
传感器是机器人感知外部环境的重要组成部分,如果传感器出现故障或不准确,将会影响机器人的行为和决策。
解决这个问题的方法是检查传感器的连接和校准,确保其正常工作。
其次是机器人的路径规划和避障能力。
TurtleBot3配备了激光雷达和视觉传感器,可以实现自主导航和避障功能。
但是,在复杂的环境中,机器人可能会遇到困难或无法正确识别障碍物。
为了解决这个问题,我们可以调整导航参数或使用更高级的算法来改进机器人的路径规划和避障能力。
另一个需要注意的问题是机器人的电池寿命和充电时间。
TurtleBot3使用电池供电,因此在使用过程中需要定期充电。
如果电池寿命太短或充电时间太长,将会限制机器人的使用时间和效率。
为了解决这个问题,我们可以选择高容量的电池或优化机器人的电源管理策略。
除了这些技术问题,使用TurtleBot3还需要一定的编程和算法知识。
在控制机器人行为和实现高级功能时,我们可以使用ROS和Python 等编程语言来编写控制程序和算法。
此外,还可以利用ROS的强大功能和丰富的软件包来扩展机器人的能力,例如SLAM(Simultaneous Localization and Mapping)建图和目标识别等。
ContentsUnpack your device (3)Prerequisites (3)Unpacking your device (3)Rack-mount your device (4)Site preparation (4)Prerequisites (5)Rack-mounting rail kit (5)Install the EBOD enclosure on the rails (5)Mounting the EBOD enclosure in the rack (7)Mounting the primary enclosure in the rack (8)Cable your device (9)Prerequisites (9)SAS cabling (9)Power cabling (11)Network cabling (13)Serial port cabling (15)A C C ELabel Description1Packing box2SAS Cables (in accessories and cables tray)3Bottom foam4Device5Top foam6Accessory box3. After unpacking the two boxes, ensure you have:a. 1 primary enclosure (the primary enclosure and EBOD enclosure are in two separate boxes).b. 1 EBOD enclosure.c. 4 power cords, 2 in each box.d. 2 SAS cables (to connect the primary enclosure to EBOD enclosure).e. 1 crossover Ethernet cable.f. 2 serial console cables.g. 1 serial-USB converter for serial access.h. 2 single QSFP-to-SFP adapters.i. 2 rack mount kits (4 side rails with mounting hardware, 2 each for the primary enclosureand EBOD enclosure), 1 in each box.j. 1 tamper-proof T10 screw driverk. Getting started documentation.If you did not receive any of the items listed above, contact technical support. The next step is to rack-mount your device. See the Rack-mount your device for details.Rack-mount your deviceThis section includes the steps required to install your Microsoft Azure StorSimple 8600 storage device in a standard 19-inch rack with front and rear posts. This device comes with two enclosures:a primary enclosure and an EBOD enclosure. Both of these need to be rack mounted.The installation consists of multiple steps each of which is discussed in the following procedures. Site preparationThe enclosures must be installed in a standard 19-inch rack that has both front and rear posts. To prepare for rack installation, ensure that:• The primary and EBOD enclosures are resting safely on a flat, stable, and level work surface (or similar).• The site where you intend to set up has standard AC power from an independent source or a rack Power Distribution Unit (PDU) with an uninterruptible power supply (UPS).• One 4U (2 X 2U) slot is available in the rack where you intend to mount the enclosures.4WARNING!Ensure you have two people available to handle the weight in case you are handling it manually.A fully configured enclosure can weigh up to 32 kg.PrerequisitesThe enclosures are designed for installation into a standard 19-inch rack cabinet with:• Minimum depth of 27.84 inches from rack post to post.• Maximum weight of 32 kg for the device.• Maximum back pressure of 5 Pascal (0.5 mm water gauge).Rack-mounting rail kitA set of mounting rails will be provided to use with the 19-inch rack cabinet. The rails have been testedto handle the maximum enclosure weight. These rails will also allow installation of multiple enclosures without loss of space within the rack. Start with the installation of the EBOD enclosure first.Install the EBOD enclosure on the railsFollow these steps to safely install the EBOD enclosure on the rails.1. With the enclosure on the work surface, remove the left and right front flange caps by pullingthe caps free. The flange caps simply snap onto the flanges.2. These rails are installed at the factory. If these are not, then install the left-rail and right-railslides to the sides of the enclosure chassis. They attach using six metric screws on each side. To help with orientation, the rail slides are marked “LH - Front” and “RH – Front,” and the end that is affixed towards the rear of the enclosure has a tapered end.12Figure 2 Attaching rail slides to the sides of the enclosure5Mounting the EBOD enclosure in the rackPerform the following steps to mount the EBOD enclosure in the rack using the rack rails that were just installed.1. Using an assistant, lift the enclosure and align it with the rack rails.2. Carefully insert the enclosure into the rails and push it completely into the rack cabinet.Figure 4 Mounting the enclosure in the rack3. Secure the enclosure into the rack by installing one provided Phillips-head screw through eachflange, left and right.4. Install the flange caps by pressing them into position and snapping them into place.79Cable your deviceThis section includes instructions to cable your device for power, network, and serial connection. PrerequisitesBefore you begin the cabling of your device, you will need:• Your primary enclosure and the EBOD enclosure, completely unpacked.• 4 power cables (2 each for the primary and the EBOD enclosure) that came with your device. • 2 SAS cables supplied with the device to connect the EBOD enclosure to the primary enclosure. • Access to 2 Power Distribution Units (PDUs) (recommended).• Network cables.• Provided serial cables.• Serial-USB converter with the appropriate driver installed on your PC (if needed).• Provided single QSFP-to-SFP adapters.• SFP cables.SAS cablingYour device has a primary and an EBOD enclosure. These enclosures need to be connected together using the SAS cables.Perform the following steps to connect the primary enclosure to the EBOD enclosure.1. Identify the primary and the EBOD enclosure. The two enclosures can be identified by looking at the respective back planes. See the following figure for guidance.I II 4321Host FabricIDII I 4321Ho s t F a b r i c D AC B 123412344321A C B 12341234432112Figure 6 Back plane view of the primary and EBOD enclosures Label Description1Primary enclosure2EBOD enclosure2. Locate the serial numbers on both the primary and the EBOD enclosure. The serial numbersticker is affixed on the back ear of each enclosure. The serial numbers must be identical on both enclosures. Contact technical support immediately if the serial numbers do not match.See the following figure to help you locate the serial numbers.1H oF a bcIIH o F a bicIDFigure 7 Rear view of the enclosure showing the location of the serial number stickerLabel Description1Ear of the enclosure3. The EBOD enclosure now needs to be connected to the primary enclosure using the providedSAS cables. Perform the following steps.a. Identify the four Serial Attached SCSI (SAS) ports on primary enclosure and EBODenclosure. The SAS ports are labeled as EBOD on primary enclosure and CTRL on theEBOD enclosure as shown in Figure 8.b. Use provided SAS cables to connect EBOD ports to CTRL ports.c. The EBOD port on Controller 0 should be connected to the CTRL port on EBOD controller0. The EBOD port on Controller 1 should be connected to the CTRL port on EBODcontroller 1. See Figure 8 for guidance.1011I II 43Host FabricIDII I 4321Ho s t F a b r i c D E B O D C B 12341234C B 12341234321CTRL 214321EBODEBOD 15A B 2346A432148A 4321CTRLA CTRL7Figure 8 SAS cabling for your deviceLabel DescriptionA Primary enclosureB EBOD enclosure1Controller 02Controller 13EBOD Controller 04EBOD Controller 15, 6SAS ports on primary enclosure (labeled EBOD)7, 8SAS ports on EBOD enclosure (labeled CTRL)Power cablingYour device has a primary enclosure and an EBOD enclosure. Both enclosures include redundant Power and Cooling Modules (PCMs). In each enclosure, each PCM must be installed and connected to different power sources to ensure high availability.Perform the following steps to cable your device for power.1. Ensure that the power switches on all the PCMs are in the OFF position.2. For the primary enclosure, connect the power cords to both PCMs. The power cords areidentified in red in the following diagram.3. Ensure that the two PCMs of the primary enclosure use separate power sources.4. Attach the power cords to the rack power distribution units as shown in the following figure.5. Repeat steps 2-4 for the EBOD enclosure.6. Turn on the EBOD enclosure by flipping each PCM’s power switch to the ON position.7. Verify that the EBOD enclosure is turned on by checking that the EBOD controller LEDs (greenLEDs on the back of the chassis) have turned ON.8. Now, turn on the primary enclosure by flipping each PCM switch to the ON position.9. Verify that the system is up by ensuring the device controller LEDs have turned ON.10. Verify that the connection between EBOD controller and device controller is active by ensuringthe SAS LEDs (4 LEDs next to the SAS port) on the EBOD controller are green.NOTICETo ensure high availability of your system, you are advised to strictly adhere to the powercabling scheme shown in the following diagram.Figure 9 Power cabling for your device12Label Description1Primary enclosure2PCM 03PCM 14Controller 05Controller 16EBOD controller 07EBOD controller 18EBOD enclosure9PDUsNetwork cablingYour device is in an active-standby confi guration: at any given time, one controller module isactive and processing all disk and network operations while the other controller module is standby.In the event of a controller failure, the standby controller immediately activates and continues allthe disk and networking operations.To support this redundant controller failover, you need to cable your device network as shown inthe following steps.1. Your device has six network interfaces on each controller, four 1 Gbps and two 10 Gbps Ethernetports. Identify the various data ports in the backplane of your device.Figure 10 Back plane of your device showing the data portsLabel Description0, 1, 4, 5 1 Gbps network interfaces2, 310 Gbps network interfaces6Serial ports13Label DescriptionA LAN with Internet accessB Controller 0C PCM 0D Controller 1E PCM 1F EBOD controller 0G EBOD controller 1H, I Hosts (for example, file servers)0-5Network interfaces6Primary enclosure7EBOD enclosureSerial port cablingPerform the following steps to cable your serial port.1. Your device has a serial port on each controller identified by a wrench icon. Locate the serialports in the backplane of your device using Figure 10.2. Identify the active controller in your device back plane. A blinking blue LED indicates thecontroller is active.3. Use the provided serial cable (if needed, the USB-serial converter for your laptop), and connectyour console or computer (with terminal emulation to the device) to the serial port of theactive controller.4. Install the serial-USB drivers shipped with this device on your computer.5. Set up the serial connection as follows: 115,200 baud, 8 data bits, 1 stop bit, no parity, flowcontrol set to None.6. Verify the connection is working by pressing Enter in the console. A serial console menushould be presented.NOTICELights-Out Management: When the device is installed in a remote data center or in acomputer room with limited access, ensure that the serial connections to both controllers are always connected to a serial console switch or similar equipment. This allows out-of-bandremote control and support operations in case of network disruption or unexpected failures.You have completed cabling your device for power, network access, and serial connection.15© 2014 Microsoft Corporation. • X19-32483-02。
VInstallation InstructionsNOTE: Read the entire instruction manual before starting the installation.NOTE: Installation Instructions include Single and Dual point connection instructions separately.SAFETY CONSIDERATIONSInstallation and servicing of this equipment can be hazardous due to mechanical and electrical components. Only trained and qualified personnel should install, repair, or service this equipment.Untrained personnel can perform basic maintenance functions such as cleaning and replacing air filters. All other operations must be performed by trained service personnel. When working on this equipment, observe precautions in the literature, on tags, and on labels attached to or shipped with the unit and other safety precautions that may apply.Follow all safety codes. Installation must be in compliance with local and national building codes. Wear safety glasses, protective clothing, and work gloves. Have fire extinguisher available. Read theseinstructions thoroughly and follow all warnings or cautions included in literature and attached to the unit. Consult local building codes, the current editions of the National Electrical Code (NEC) NFPA 70.In Canada refer to the current editions of the Canadian Electrical Code CSA C22.1.Recognize safety information. This is the safety-alert symbol . When you see this symbol on the unit and in instructions or manuals, be alert to the potential for personal injury. Understand these signal words;DANGER, WARNING, and CAUTION. These words are used with the safety-alert symbol. DANGER identifies the most serious hazards which will result in severe personal injury or death. WARNING signifies hazards which could result in personal injury or death. CAUTION is used to identify unsafe practices which may result in minor personal injury or product and property damage. NOTE is used to highlight suggestions which will result in enhanced installation, reliability, or operation.Follow all safety codes. Wear safety glasses and work gloves. Have a fire extinguisher available.Before proceeding with heater installation, inspect thoroughly for shipping damage. Notify shipper immediately if any damage is found. Clean all dirt, dust and moisture from heater package. Check for proper clearances of live parts, between phases and to ground. Make sure that all required barriers are in place. Check conductors run in multiple to insure that they are properly wired. Refer to unit installation instructions for complete unit installation details. The maximum duct static for safe electric heater operation is shown in Table 1.DESCRIPTION AND USAGEThis electric heater series is engineered, designed and listed to beinstalled only in the models shown in Table 2. Before proceeding, verify the heater label for correct voltage and kW requirements.PACKAGE CONTENTSElectric Heater Package Contents1.Heater assembly2.Installation instructions3.Identification label4.Schematic on lid door for all fused units5.Schematic on sticker to be placed inside unit panel for non-fused units6.Wire ties-6-in. (5)7.Screws #10A (5)8.Dual Point Warning Label9.Dual Point Electrical Rating LabelINSTALLATIONSINGLE POINT HEATER INSTALLATIONNOTE: Thermostat used must be capable of energizing “G” (indoor fan) on a call for “W” (heating). If “G” is not energized system malfunction will occur.1.Open all electrical disconnects and install lockout tag before beginning any installation or service work.50ES-A, 50EZ-A, 50VG-A, 50VL-A, B, C, D, 50VR-A, C, 50VT-A, B, C, 604D--A, 607C--A, B, C, 607E--A, C, 704D--A, 707C--A, B, C, D, 707E--A, PA3G--A,PH3G--A, PA4G, PH4G, PAD3, PHD3, PAD4, PHD4, WPA4, WPH4, PAR5, PHR5SMALL PACKAGED PRODUCTS Electric Heaters 5-20kW 60 Hz Product!ELECTRICAL SHOCK HAZARDFailure to follow this warning could result in personal injury or death.Before performing installation, service or maintenance operations on this system, turn off all main power to system. There may be more than one disconnect switch. Turn off accessory heater power switch if applicable. Lockout and tag switch with a suitable warning label.!CUT HAZARDFailure to follow this caution may result in personal injury.Sheet metal parts may have sharp edges or burrs. Use care and wear appropriate clothing, safety glasses and gloves when handling parts.2.Check for proper equipment model number from list.3.Verify that unit ductwork is installed per base unit instructions.4.Remove unit electrical access panel (See Fig.1).5.Locate and remove the heater access cover plate inside unit accesspanel (See Fig.3). Save screws.6.Remove electric heater from the packaging.7.Install heater, sliding assembly carefully through access hole.Ensure that mounting holes of heater align with mounting holes on the unit. Secure heater assembly with screws provided.8.(FOR FUSED HEATERS ONLY) Install included fuse box onbottom of Electrical Access Area. Screw holes on fuse box willalign with holes on basepan lip inside Electrical Access Area. (See Fig.6.) Secure fuse box with the 2 mounting screws provided.9.Dress wires with wire ties provided.Fig. 1 – Unit Access Panel and Label LocationFig. 2 – Second Power Line Access Hole Location SINGLE POINT ELECTRICAL CONNECTIONNOTE: All electrical connections, wire sizes and type of conduit shall meet the National Electric Code (NEC) and state and local codes (or International Electric Code) as applicable.NOTE: Use minimum 75°C copper wire only.1.Make sure all disconnects are still open and tagged out as requiredpreviously.2.Mark the main unit nameplate with an “X” for the electric heatersize being installed. Refer to the electrical data marked with an “X”on the nameplate for wire and maximum over current protectionsizing.NOTE: On some outdoor models the accessory electric heater kit numbers have changed. Before installing heater kit, make sure kit is approved by referring to unit rating plate, and if used, unit label showing cross reference of approved heaters. Only use kits listed on unit rating plate or approved alternate.3.Connect low voltage wires as shown in unit schematic diagramsfound on the base unit installation instructions. These connections must be made in the 24v barrier section inside the unit panel (See Fig.3).NOTE: If the unit 24V wires do not have a matching receptacle, cut the 24V wires from the electric heater plug, strip the ends, and wire nut together to match the schematic connections. If the electric heater 24V wires do not have a matching plug, cut the 24V wires from the unit receptacle, strip the ends, and wire nut together to match the schematic connections.4.Insert field power line through the electrical heater access panelhole (see Fig.6 or Fig.7) and connect to electric heater as shown in their respective wiring diagram. Fused electrical heaters field lines will be connected to the fuse block lugs (see Fig.10) and non fused electric heater field lines will be connected to heater leads usingwire nuts. Ground electrical equipment in the appropriate locations.Seal all openings to prevent air leaks.IMPORTANT: Heaters with factory installed fuses may be installed on a branch circuit protected by either a fuse or circuit breaker. For all other heaters, the branch circuit must be protected by a fuse or circuit breaker supplied by others.5.Connect stripped wires from heater to compressor contactor leadsusing supplied wire nuts according to their heater wiring diagram. NOTE: Dress wires with wire ties provided. For fused heaters, use pre-mounted wire tires inside of fuse box cover to secure and strain relieve wires.6.Separate all wires from incoming power leads.7.Close electrical access panel.DUAL POINT HEATER INSTALLATIONNOTE: Complete single point heater installation procedures before completing the follow steps.1.Open all electrical disconnects and install lockout tag beforebeginning any installation or service work.2.Remove electric access panel (see Fig.1), check to make sure thereis clearance on the inside of control box above the existing highvoltage knockout. Using a knockout punch and die combination, make a 7/8-in. hole on the Electrical Heat access panel for second power circuit (see Fig.2). A knockout punch and die combination or equivalent tool is required to make this hole. Other types of drill bits or standard hole saws are not acceptable.3.Attach warning and rating labels in the selected location (seeFig.1).4.Mark the main unit nameplate with an “X” next to the accessoryheater “none”. Mark the dual point rating label installed at step 3 with an “X” for the electrical heater size being installed. Refer to!ELECTRICAL SHOCK HAZARDFailure to follow this warning could result in personal injury or death. For proper grounding, be sure to install mounting screws for securing fuse box to base pan.LABEL LABEL LOCATIONPANEL HEATACCESSPANELthe electrical data marked with an “X” on each nameplate for wire and maximum over current protection sizing.5.Remove power line connection from heater to unit contactor andcompressor (see Fig.4 and Fig.5). These are the stripped end wires black and yellow, with opened ends.DUAL POINT ELECTRICAL CONNECTIONNOTE: All electrical connections, wire sizes and type of conduit shall meet the national Electric Code (NEC) and state and local codes (or International Electric Code) as applicable.NOTE: Use a minimum 75°C copper wire only.1.Make sure all disconnects are still open and tagged out as requiredpreviously.2.Connect low voltage wires as shown in unit schematic diagramsfound on base unit installation instructions. These connections must be made in the 24v barrier section inside the unit panel (see Fig.Fig.3).NOTE: If the unit 24V wires do not have a matching receptacle, cut the 24V wires from the electric heater plug, strip the ends, and wire nut together to match the schematic connections. If the electric heater 24V wires do not have a matching plug, cut the 24V wires from the unit receptacle, strip the ends, and wire nut together to match the schematic connections.3.Insert first field power line through the electrical heater accesspanel bottom hole (see Fig.8 or Fig.9) and connect to electricheater as shown in their respective wiring diagram found on theheater accessory kit. Fused electrical heaters field lines will beconnected to the fuse block lugs (see Fig.10.) and non fusedelectric heater field lines will be connected to heater leads usingwire nuts. Ground electrical equipment in the appropriate locations.Seal all openings to prevent air leaks.IMPORTANT: Heaters with factory installed fuses may be installed on a branch circuit protected by either a fuse or circuit breaker. For all other heaters, the branch circuit must be protected by a fuse or circuit breaker supplied by others.NOTE: Dress wires with wire ties provided. For fused heaters, use pre-mounted wire ties inside of fuse box cover to secure and strain relieve wires.4.Insert second field power line through the electrical heater accesspanel top hole (see Fig.8 or Fig.9) and connect to unit contactor black and yellow leads using wire nuts. Ground electricalequipment in the appropriate locations.5.Separate all wires from incoming power leads.6.Close electrical access panel.Fig. 3 – Heater Blank Plate LocationPLATEFig. 5 – Wiring Diagram Example for Non-Fused HeaterFig. 7 – Single Point Connections for Non-Fused HeaterFuse BoxPower Line to HeaterPOWERLINE TO HEATER24 VOLT FIELDWIRING BOXFig. 9 – Dual Point Connection for Non-Fused HeaterSTART-UPNOTE: Heater Relay, Rectifier, Time Delay Boards208/230 1 PH and 3 PH heaters only (does not include 460v). Each heater element is controlled by a 24VDC control relay. Each control relay is energized by a small rectifier board attached directly to relay coil terminals. When possible one rectifier board is used to control a second relay.The rectifier board converts incoming 24v AC control signal to DC. Some heaters may have up to four relays. The second and/or third relay rectifier board may also have a time delay feature and a small jumper wire built into it. With the jumper uncut, the time delay is approximately 5 sec after the initial first stage. When jumper is cut at factory this provides an 8 sec delay.NOTE: Refer to base unit installation instructions as required.1.Check for loose terminal connections.2.Check that all fuse and circuit breaker short circuit interruptingratings are adequate.3.Turn on unit and heater power.4.Set thermostat to call for heat.5.Check operation of heater.6.Check that airflow across the heater is at or above the minimumrecommended CFM requirement (See unit installation instructions).Second Field Poer Line to Unit ContactorPower Line to Heater!ELECTRICAL SHOCK HAZARDFailure to follow this warning could result in personal injury or death. Before proceeding, verify that all wiring is correct per factory approved schematic. Notify factory immediately of any discrepancies.Adjust indoor blower heat speed as required. Check that duct system conforms to static pressure limits in Table 1.NOTE: See Table 1for Non-Export units (with -3, -5 or -6 as electrical option-see product data).TROUBLESHOOTING1.Fuses - Malfunction will interrupt power to the unit. Check forcause of failure, replace fuses.2.Limit Switch - Malfunction prevents heating element(s) from beingenergized. Replace switch if malfunction occurs.3.Contactor - Malfunction will not allow heater to energize. Replacefaulty contactor. Do not attempt to replace coil or dress contacts.Table 1 – Maximum Duct Static Pressure for 60 Hz Units(IN. W.C.) (pa)Fig. 10 – Fused Heater Example Fuse BoxFig. 11 – Schematic Location for Non-Fused HeaterUNIT(60 HZ UNITS)MAXIMUM STATIC PRESSUREUNIT SIZE024030036042048060Heat Pump .50 (125).50 (125).50 (125).50 (125).50 (125).50 (125)Electric Cooling.50 (125).50 (125).50 (125).50 (125).50 (125).50 (125)Fuse Box Lid (shown open)Compressor Contactor Wire (Yellow and Black)Connectors to the Heater Rectifier Board (Yellow and Black)Heater Fuse Block Field Wire Connections Attach Box with 2 screwsELECTRIC HEATER WIRING LABELTable 2 – Electric Heater Usage Chart—60 Hz UnitsSingle Stage PAC50ES-A, 704D--A, PA3G--A, PAD3 (PAC)50VL-A, B, C, D, 707C--A, B, C, D, PA4G,PAD4, WPA4 (PAC)CPHEATER kW V PH Fuse243036424860243036424860 052523010x x x x x x x x x x x x 064523014x x x x x x x x x x x x 0697.223010x x x x x x x x x x x x 0707.223014x x x x x x x x x x x x 0651023010x x x x x x x x0501023014x x x x x x x x x x x x 0511523014x x0661523016x x x x x x 1331523014x x x x0532023014x x0542023016x x x x x x 055523030x x x x x x x x 0561023030x x x x x x x x 0681023036x x x x x x x x 0571523030x x x x x x x x 0581523036x x x x x x x x 0592023036x x x x x x 0611046030x x x x x x x x 0621546030x x x x x x x x 0632046030x x x x x x = Base unit not offeredx= Approved combinationDual Stage PAC50VG-A, 707E--A, PAR5 (PAC) CPHEATER kW V PH Fuse243036424860 052523010x x x x x x 064523014x x x x x x 0697.223010x x x x x x 0707.223014x x x x x x 0651023010x x x x0501023014x x x x x x 0511523014x x0661523016x x x x 1331523014x0532023014x0542023016x x x 055523030x x x x x 0561023030x x x x x 0681023036x x x x x 0571523030x x x x x 0581523036x x x x x 0592023036x x x 0611046030x x x x 0621546030x x x x 0632046030x x x = Base unit not offered= Approved combinationSingle Stage HP50EZ-A, 604D--A, PH3G--A, PHD3 (PHP)50VT-A, B, C, 607C--A, B, C, PH4G, PHD4,WPH4 (PHP)CPHEATER kW V PH Fuse243036424860243036424860 052523010x x x x x x x064523014x x x x x x x x x x x x 0697.223010x0707.223014x x x x x x x x x x x x 06510230100501023014x x x x x x x x x x x x 05115230140661523016x x x x x x x x 1331523014x x05320230140542023016x x x x x x 055523030x x x x x x x x 0561023030x x x x x x 0681023036x x x x x x x x 05715230300581523036x x x x x x x x 0592023036x x x x x x 0611046030x x x x x x x x 0621546030x x x x x x x x 0632046030x x x x x x = Base unit not offeredx=Approved combinationDual Stage HP50VR-A, C 607E—A, C (PHP) CPHEATER kW V PH Fuse243036424860 052523010x x x064523014x x x x x x0697.223010x0707.223014x x x x x x06510230100501023014x x x x x x05115230140661523016x x x x1331523014x05320230140542023016x x x055523030x x x x x0561023030x x x x0681023036x x x x x0581523036x x x x x0592023036x x x0611046030x x x x0621546030x x x x0632046030x x x = Base unit not offeredx= Approved combination©2019 CAC/BDP7310 W. Morris Street • Indianapolis, IN46231Catalog No: IIK-CPHEATER-24Edition Date: 08/19Replaces : IIK-CPHEATER-23。
一、引言TurtleBot 4 是一款由Clearpath Robotics推出的机器人开发评台,它集成了ROS(机器人操作系统)和一系列传感器、执行器等模块,可以用于教育、研究和商业等领域。
本文将针对TurtleBot 4 的硬件介绍、软件配置、实验操作等方面给出详细的指导,帮助读者快速上手并深入了解这款机器人评台。
二、硬件介绍1. TurtleBot 4 的外观和结构TurtleBot 4 采用了经典的差动驱动底盘设计,底盘上配备有激光雷达、摄像头等传感器模块,整体结构紧凑、稳定。
在箱体上设有各种接口,方便用户进行外部设备的连接和扩展。
2. TurtleBot 4 的传感器(1)激光雷达:TurtleBot 4 配备了一款高性能激光雷达传感器,可以实现高精度的环境感知和障碍物避障。
(2)摄像头:机器人上配备了高清摄像头,支持视觉导航、目标识别等功能。
(3)惯性测量单元(IMU):IMU 传感器可以提供机器人的姿态和加速度信息,对于导航和定位至关重要。
3. TurtleBot 4 的执行器TurtleBot 4 配备了差动驱动底盘、舵机等执行器,可以实现机器人的运动控制、姿态调整等功能。
4. TurtleBot 4 的电源系统TurtleBot 4 内置可充电锂电池,支持机器人在室内和室外环境下的长时间运行。
三、软件配置1. ROS 系统TurtleBot 4 使用ROS作为机器人操作系统,用户可以通过ROS框架进行机器人的开发和控制。
在初次使用TurtleBot 4 之前,需要正确配置ROS开发环境,并安装相应的ROS软件包。
2. SLAM(Simultaneous Localization and Mapping)算法SLAM 算法可以帮助机器人在未知环境中实现自主定位和地图构建。
用户可以通过ROS中的开源SLAM算法包,结合TurtleBot 4 的传感器数据,实现机器人的SLAM功能。
机器人操作系统ROS: 典型功能实现方法详解李宝全ROS体系版本:Hydro 2013-09-04Groovy 2012-12-31Fuerte 2012-04-23ElectricDiamondbackROS是一种分布式的处理框架。
文件系统:在硬盘上查看的ROS源代码的组织形式包 Package:含有manifest.xml 或package.xml?比如下文中的turtlebot_teleop,turtlebot_bringup。
堆:Stack包的集合含有stack.xml编译方法:catkin:Groovy及以后版本rosbuild:用于Fuerte及以前版本常用命令: rostopic list;列出系统中的所有Topicrosdep:安装依赖包,例如 rosdep install rosaria安装时,需要先建一个工作空间,然后把gitgub网站上相应的包下载到src文件夹下,再执行该语句。
具体见“ROSARIA配置与运行”一节。
环境变量设置:export例如:export ROS_HOSTNAME=marvinexport ROS_MASTER_URI=Bulks给的一些有用的命令rosnode info /rosaria_teleop_key_1rosrun rqt_robot_steering rqt_robot_steeringrosrun rqt_gui rqt_guirostopic helprosnode helprosnode info /RosAriarosnode info /rosaria_teleop_key_1rosnode listecho $ROS_HOSTNAMEROS安装安装教程:1.3 安装keys1.4 安装使Debian包为最新:sudo apt-get updateFull安装:sudo apt-get install ros-hydro-desktop-full会出现一个界面,利用Tab选择Yes即可成功则提示:ldconfig deferred processing now taking place找到可以使用的包:apt-cache search ros-hydro1.5初始化rosdepsudo rosdep initrosdep update1.6环境设置echo "source /opt/ros/hydro/setup.bash" >> ~/.bashrcsource ~/.bashrc1.7得到rosintallsudo apt-get install python-rosinstallTurtleBot 配置与运行介绍TurtleBot的主页面(安装&运行):TurtleBot包(Package)的安装过程安装(/// ):按照Debs Installation按照方法来安装:1.首先安装:> sudo apt-get install ros-hydro-turtlebot ros-hydro-turtlebot-apps ros-hydro-turtlebot-viz ros-hydro-turtlebot-simulator ros-hydro-kobuki-ftdi2.之后加入sourse的bash中:> . /opt/ros/hydro/setup.bash. 说明:a)在终端中输入这一行后很快就结束.b)效果是在.bashrc(Home中的隐藏文件)的最后一行加入了"source/opt/ros/hydro/setup.bash",c)效果等效于命令> echo "source /opt/ros/hydro/setup.bash" >> ~/.bashrc. 这样的话就不用每次启动都输入命令“source /opt/ros/hydro/setup.bash”了.d)这个好像在安装ROS时已经执行过了,不需要再执行一次吧?e)3.之后加入kobuki的udev规则:> rosrun kobuki_ftdi create_udev_rules安装完之后还需要加入网络时间控制(/// ), 否则与kokuki无法通讯.1.首先安装chrony:sudo apt-get install chrony问题:我重装系统后再安装turtlebot后,连接不上kokuki,但能正常连接Kinect。
TurtleBot Assembly Instructions
TurtleBot BOM2
ITEM QTY PART NUMBER DESCRIPTION
11468-04550-6256-32x0.625Star Drive BHCS--Black Oxide
68-04552-2000TurtleBot M-F Standoff--2inch
2 8
3168-04539TurtleBot Plate0
4468-02403-125Spacer,1/2"OD,#6ID
5168-04548USB to DIN-8Cable
6168-05036TurtleBot Cargo Bay Interconnect Board
7168-06209Kinect USB and Power Cable
8268-04540TurtleBot Plate1
9 268-04556Kinect Standoff
10 168-04546Kinect Sensor
11 468-02421-8000TurtleBot F-F Standoff
12 168-04541TurtleBot Plate2
NOTE: You will nedd a small flat head screw driver for modifying the kinect.
ITEM QTY PART NUMBER DESCRIPTION
1868-04550-625
6-32x 0.625Star Drive BHCS--Black Oxide
2468-04552-2000TurtleBot M-F Standoff--2inch Item No.
QTY
24
18
54
31
41
1
2
3
4
Remove the cover over the miniDIN Port.
Attach the rear wheel to the base of the robot.
Attach the 2 inch standoffs (Item 2) to the base plate (Item 3) using the four provided screws (Item 8).
Attach the plate (Item 3) to the base of the robot using the four provided screws (Item 8) and the spacers (Item 5).
Base Plate Assembly
3
Kinect Preperation
4
1
Slide a flat head screw driver under the grill of the kinect (Item 1) as shown and remove the grill. Do this for each grill.
2
Remove the two outside
security screws from the base of the kinect as shown.
QTY
ITEM QTY PART NUMBER DESCRIPTION
1268-04556Kinect Standoff Assembly Kinect Plate Assembly
5
Item No.
QTY
21
42
31
12
1
2
Attach the kinect standoffs (Item 1) to the base of the housing. Screw the standoff all the way in untill the it is flush with the kinect bottom.
Attach the kinect to the plate (Item 3) using the provided screws (Item 4).
NOTE: It is important to make the standoff as perpendicular to the kinect as possible so that the
camera and depth images are level to the base of the robot.
Cable Bundling
6
3
Connect the kinect USB to the Y-splitter cable.
1
Bundle the miniDIN to serial cable as shown. Make sure to leave 4 to 6 inches of cable free to connect to the laptop.
2
Bundle the kinect USB cable as shown. Make sure to leave 6 to 8 inches of cable free to route from the plate to the base of the robot.
ITEM QTY PART NUMBER DESCRIPTION
QTY
Plugging Things Together
7
1
Plug the miniDIN cable (Item 2)into the side of the create base as shown.
2
Plug in the TurtleBot power board (Item 3) into the cargo bay of the robot as shown.
ITEM QTY PART NUMBER DESCRIPTION
1168-04557Create w/Plate 0
QTY
3
Plug in the power connector of the kinect power cable (Item 4)into the TurtleBot power board (Item 3) as shown.
Hiding the Cables
8
1
Place both cable bunbles in cargo bay of the robot with the USB connectors hanging out the back of the robot as shown.
ITEM QTY PART NUMBER DESCRIPTION
1168-04557Create w/Plate 0
QTY
ITEM QTY PART NUMBER DESCRIPTION
1168-04563Create with Plate 0and Cables 2168-04540
TurtleBot Plate 1
3468-04552-2000TurtleBot M-F Standoff--2inch 4168-04558
Kinect Sensor w/Plate 1
5468-02421-8000TurtleBot F-F Standoff--8inch Putting Everything Together
9
Item No.
QTY
74
61
54
41
81
34
11
21
1
Assemble the plates from the bottom up as shown.
2
Carefully turn the TurtleBot over . Remove the bright green battery holder and insert the yellow rechargeable battery.
3
Insert the laptop between plate 1and the kinect plate as shown with the laptop hinge on the left.
4
Plug the two USB cables into the laptop at the rear of the TurtleBot.。