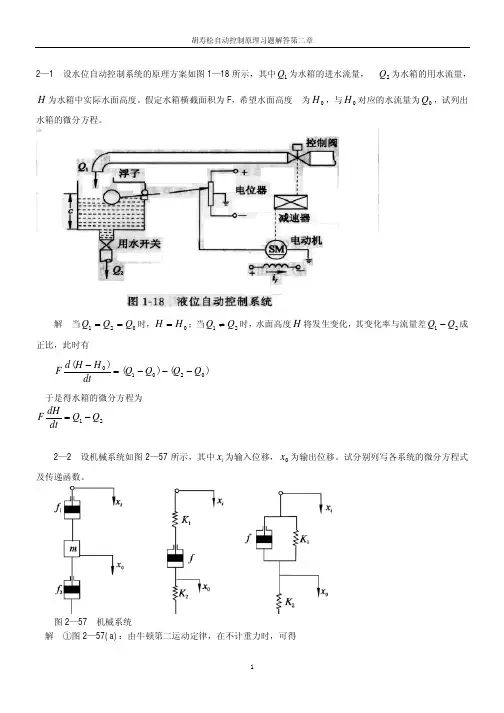
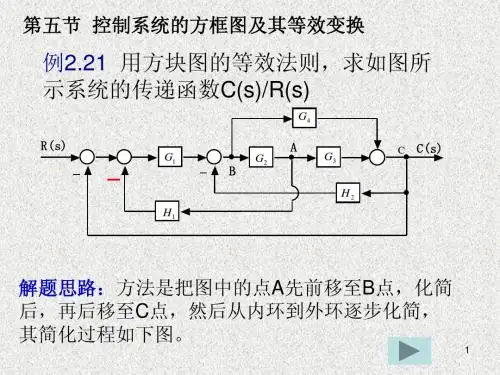
第二章 结构图的等效变换求系统的传递函数
- 格式:ppt
- 大小:741.01 KB
- 文档页数:13
第二章2-3 设系统传递函数为342)(2++=s s s G 初始条件0/)0(,1)0(=-=dt dc c 。
求单位阶跃输入r (t)=1(t)时,系统的输出响应c (t)。
【解】系统传递函数与微分方程是一一对应的,故通过传递函数先求出微分方程,然后通过拉氏变换的方法求解微分方程。
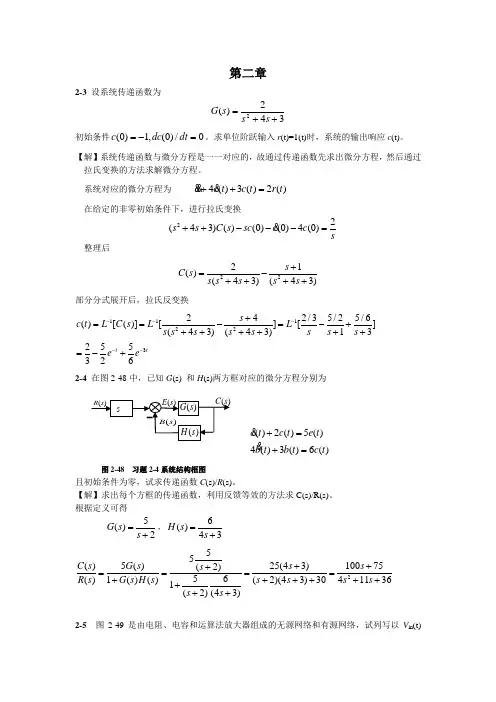
系统对应的微分方程为 4()3()2()c c t c t r t ++= 在给定的非零初始条件下,进行拉氏变换22(43)()(0)(0)4(0)s s C s sc c c s++---=整理后2221()(43)(43)s C s s s s s s +=-++++部分分式展开后,拉氏反变换111223242/35/25/6()[()][][](43)(43)13255326t t s c t L C s L L s s s s s s s s e e -----+==-=-+++++++=-+2-4 在图2-48中,已知G (s) 和H (s)两方框对应的微分方程分别为()2()5()4()3()6()c t c t e t b t b t c t +=+=图2-48 习题2-4系统结构框图且初始条件为零,试求传递函数C (s)/R (s)。
【解】求出每个方框的传递函数,利用反馈等效的方法求C(s)/R(s)。
根据定义可得 5()2G s s =+,6()43H s s =+ 255()5()25(43)10075(2)56()1()()(2)(43)30411361(2)(43)C s G s s s s R s G s H s s s s s s s +++====+++++++++2-5 图2-49是由电阻、电容和运算法放大器组成的无源网络和有源网络,试列写以V in (t)为输入量,V out (t)为输出量的传递函数。
(a) (b )(c) (d)图2-49 习题2-5电路图【解】(a) 1211211,1RZ R Z C s RC s C s===+ 22112121211()1()11Z C s RC s G s R Z Z R C C s RC s C s +===+++++(b ) 21122211R Z R Z R Cs R Cs ===+ 2222111211()1R Z R Cs R G s Z R R R Cs +=-==-+ (c) 32321123232321()(1)1()1()1R R R R Cs Cs Z R Z R R Cs R R Cs R R Cs++==+==++++ 323232211132(1)()11()()1R R Cs R R Cs R Z R Cs G s Z R R R R Cs ++++=-=-=-++ (d)本题和(b)、(c)做法图通,因为反馈通路有接地的部分。
第二章习题解题过程和参考答案第二章习题解题过程和参考答案2-1 试建立题2-1图所示各系统的微分方程 [其中外力)(t f ,位移)(t x 和电压)(t u r为输入量;位移)(t y 和电压)(t u c为输出量;k (弹性系数),μ(阻尼系数),R (电阻),C (电容)和m (质量)均为常数]。
解:2-1(a) 取质量m 为受力对象,如图,取向下为力和位移的正方向。
作用在质量块m 上的力有外力f(t),重力mg ,这两个力向下,为正。
有弹簧恢复力[]0)(y t y k +和阻尼力()dy t dtμ,这两个力向上,为负。
其中,0y 为0)(=t f 、物体处于静平衡位置时弹簧的预伸长量。
根据牛顿第二定理F ma ∑=,有[]22()()()()dy t d y t f t mg k y t y m dt dtμ+-+-= 其中:0ky mg =代入上式得22)()()()(dt t y d mdt t dy t ky t f =--μ整理成标准式:22()()()()d y t dy t m ky t f t dt dtμ++=μμ()f t[()k y t +()dy t dt或也可写成:22()()1()()d y t dy t k y t f t dt m dt m mμ++=它是一个二阶线性定常微分方程。
2-1(b) 如图,取A 点为辅助质点,设该点位移为()Ax t ,方向如图。
再取B 点也为辅助质点,则该点位移即为输出量()y t ,方向如图A 点力平衡方程:1()()[()()][]AAdx t dy t k x t x t dt dtμ-=- ① B 点力平衡方程:2()()()[]Adx t dy t k y t dt dtμ=- ②由①和②:12[()()]()A k x t x t k y t -= 得:21()()()Akx t x t y t k=-二边微分:21()()()Adx t k dx t dy t dt dt k dt=-③将③代入②:221()()()()[]k dx t dy t dy t k y t dt k dt dtμ=--整理成标准式:1221()()()k k k dy t dx t y t k dt dtμ++=或也可写成:()A t AB1211212()()()()k k k dy t dx t y t dt k k k k dtμ+=++它是一个一阶线性定常微分方程。
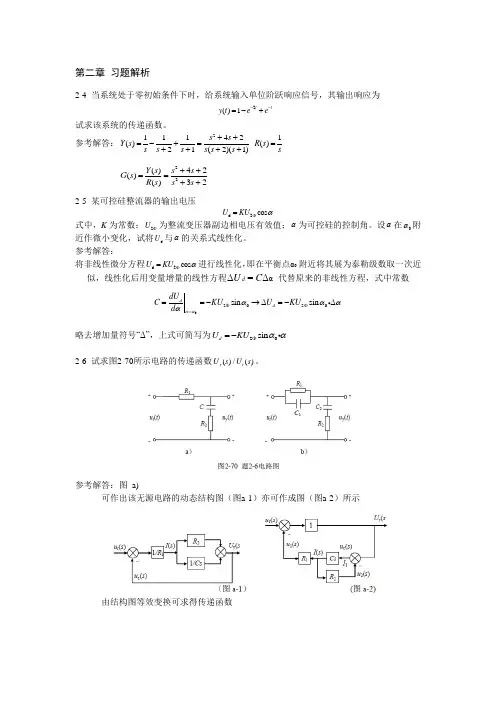
第二章 习题解析2-4 当系统处于零初始条件下时,给系统输入单位阶跃响应信号,其输出响应为2()1t t y t e e --=-+试求该系统的传递函数。
参考解答:2111421()()21(2)(1)s s Y s R s s s s s s s s++=-+==++++ 22()42()()32Y s s s G s R s s s ++==++2-5 某可控硅整流器的输出电压d 2cos U KU αΦ=式中,K 为常数;2U Φ为整流变压器副边相电压有效值;α为可控硅的控制角。
设α在0α附近作微小变化,试将d U 与α的关系式线性化。
参考解答:将非线性微分方程d 2cos U KU αΦ=进行线性化,即在平衡点α0 附近将其展为泰勒级数取一次近似,线性化后用变量增量的线性方程ΔU d = C Δα 代替原来的非线性方程,式中常数2020sin sin dd dU C KU U KU d ααααααΦΦ===-→∆=-∆略去增加量符号“Δ”,上式可简写为20sin d U KU ααΦ=- 2-6 试求图2-70所示电路的传递函数()/()y r U s U s 。
参考解答:图 a)可作出该无源电路的动态结构图(图a-1)亦可作成图(图a-2)所示由结构图等效变换可求得传递函数212()11()()11c r U s R Cs bTs U s R R Cs Ts ++==+++式中21212(),1R T R R C b R R =+=<+ ,该网络称为滞后网络。
图 b)由图(b )网络可作出其动态结构图(b-1),简化为(b-2)即可得传递函数:112221122112212()(1)(1)()()1y r U s R C s R C s U s R C R C s R C R C R C s ++=++++该网络称为滞后-超前网络(滞后-超前电路)。
2-7 试求图2-71所示有源电路的传递函数y r ()/()U s U s 。
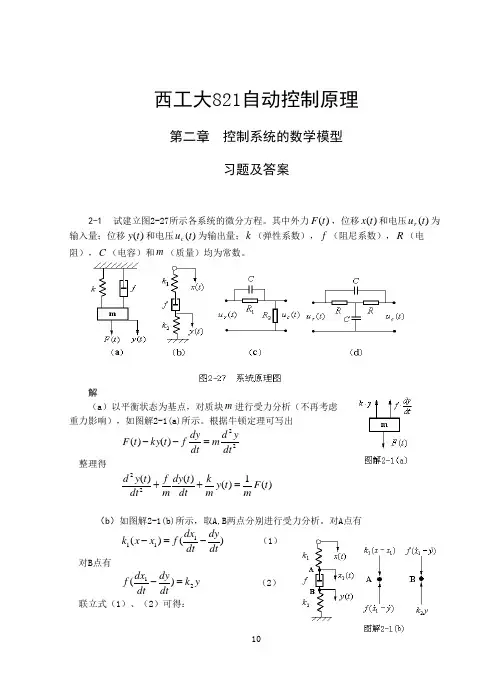
西工大821自动控制原理第二章 控制系统的数学模型习题及答案2-1 试建立图2-27所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dt t y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ (c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4)联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
2-7 结构图等效变换及梅逊公式求传递函数时,需要对微分方程组(或变换方程组)进行消元,最后仅剩下输入、输出两个变量,因此中间变量的传递过程得不到反映。
若采用结构图,它就能形象地表明输入信号在系统或元件中的传递过程。
另外,下面将会看到,利用结构图,也便于求取传递函数。
所以,结构图在控制理论中应用十分广泛。
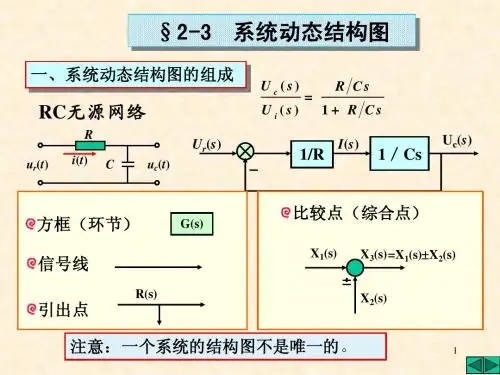
一、结构图在第2-6节中,我们曾采用消元法求得图2-24所示RC 网络的传递函数。
这里,我们采用结构图的方法求其传递函数。
RC 网络的微分方程组如下:⎪⎩⎪⎨⎧=+=⎰idt C u u Ri u c cr 1对上两式进行拉氏变换,得)()()(s U s RI s U c r +=或[])()()(1s I s U s U Rc r =- (2-54) )(1)(s I Css U r =(2-55)方程(2-54)可用图2-29)(a 表示,方程(2-55)可用图2-29)(b 表示。
将图2-29)(a )(b 按信号传递方向结合起来,网络的输入量置于图示的左端,输出量置于最右端,并将同一变量的信号连在一起,如图2-30)(a 所示,即得RC 网络结构图。
对图2-30)(a 进行所谓“等效变换”就可得出网络传递函数,因此网络结构就更为简单,如图2-30)(b 所示。
关于结构图等效变换的方法将另作介绍。
(1)建立控制系统各元、部件的微分方程。
(2)对各元、部件的微分方程进行拉氏变换,并做出各元、部件的结构图。
(3)按系统中各信号的传递顺序,依次将各元件结构图连接起来,便得到系统的结构图。
下面以图1-7所示随动系统为例。
把组成该系统各元部件的微分方程(2-18)进行拉氏变换,可得方程组(2-56e a ~),其中比较元件 )()()(s s s c r θθθε-=(2-56a ) 电位器 )()(1s K s U εεθ= (2-56b ) 放大器 )()(2s U k s U ε=(2-56c ) 电动机 )()()1(s U K s s T s m m =+εθ(2-56d ) 减速器)(1)(s is c θθ=(2-56e )各元、部件的结构图如图2-31所示。