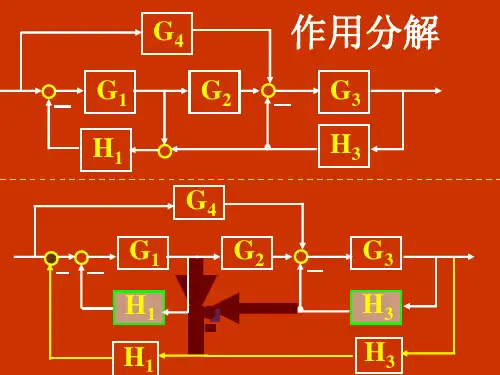
系统结构图及等效变换梅森公式
- 格式:ppt
- 大小:2.63 MB
- 文档页数:28


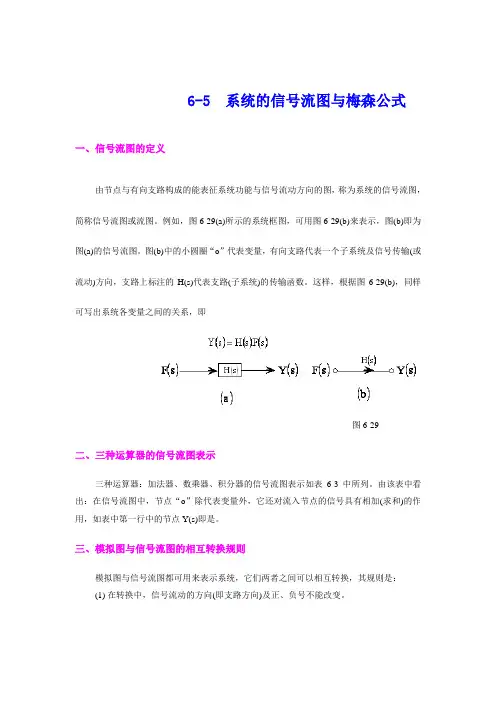
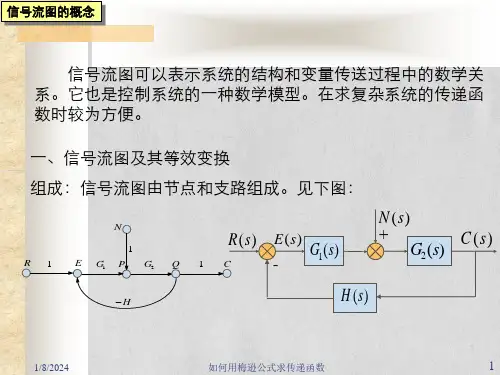
6-5 系统的信号流图与梅森公式一、信号流图的定义由节点与有向支路构成的能表征系统功能与信号流动方向的图,称为系统的信号流图,简称信号流图或流图。
例如,图6-29(a)所示的系统框图,可用图6-29(b)来表示,图(b)即为图(a)的信号流图。
图(b)中的小圆圈“o”代表变量,有向支路代表一个子系统及信号传输(或流动)方向,支路上标注的H(s)代表支路(子系统)的传输函数。
这样,根据图6-29(b),同样可写出系统各变量之间的关系,即图6-29二、三种运算器的信号流图表示三种运算器:加法器、数乘器、积分器的信号流图表示如表6-3中所列。
由该表中看出:在信号流图中,节点“o”除代表变量外,它还对流入节点的信号具有相加(求和)的作用,如表中第一行中的节点Y(s)即是。
三、模拟图与信号流图的相互转换规则模拟图与信号流图都可用来表示系统,它们两者之间可以相互转换,其规则是:(1) 在转换中,信号流动的方向(即支路方向)及正、负号不能改变。
(2) 模拟图(或框图)中先是“和点”后是“分点”的地方,在信号流图中应画成一个“混合”节点,如图6-30所示。
根据此两图写出的各变量之间的关系式是相同的,即。
(3) 模拟图(或框图)中先是“分点”后是“和点”的地方,在信号流图中应在“分点”与“和点”之间,增加一条传输函数为1的支路,如图6-31所示。
(4) 模拟图(或框图)中的两个“和点”之间,在信号流图中有时要增加一条传输函数为1的支路(若不增加,就会出现环路的接触,此时就必须增加),但有时则不需增加(若不增加,也不会出现环路的接触,此时即可以不增加。
见例6-17)。
(5) 在模拟图(或框图)中,若激励节点上有反馈信号与输入信号叠加时,在信号流图中,应在激励节点与此“和点”之间增加一条传输函数为1的支路(见例6-17)。
(6) 在模拟图(或框图)中,若响应节点上有反馈信号流出时,在信号流图中,可从响应节点上增加引出一条传输函数为1的支路(也可以不增加,见例6-17)。
§2-4 传递函数定义控制系统的传递函数为 在零初始条件下 ,输出信号的拉氏变换与输入 信号的拉氏变换之比。
表示为Y ( s ) bm s m + bm -1 s m -1 + ... + b1 s + b0 G( s) = = n , n ³ m (2-95) n -1 U (s) s + a n -1 s + ... + a1 s + a0系统的输出可表示为传递函数与控制输入的乘积Y ( s) = G ( s) × U ( s)(2-96)U(s)G(s)Y(s)回章首回节首12-4-3 控制系统的传递函数 1.复数阻抗U R (s) Z R ( s) = =R I R (s)(2-100)ZC ( s) =UC (s) 1 = I C ( s ) Cs(2-101)U L ( s) Z L ( s) = = Ls I L (s)回章首 回节首(2-102)22.典型环节 (1) 比例环节G(s) = Uo (s) =K Ui (s)(2) 积分环节G( s) = Uo ( s) 1 = Ui ( s) Ts(3) 微分环节U o (s) G (s) = = ts U i (s)3(4) 一阶惯性环节U o ( s) 1 G( s ) = = U i ( s) Ts + 1(5) 二阶振荡环节G( s) = U o ( s) 1 = 2 2 U i ( s ) T s + 2xTs + 1(6) 延迟环节G( s) = U o (s) = e -ts U i ( s)4画结构图时,所依据的原则是信号流通关系。
下面以实例来说明。
[例2-25] 已知两级RC网络如图2-33所示,作出该系 统的结构图。
解 设一个中间变量为电容C1 的电压Ux, 采 用复 数阻抗法顺序写出各 算子代数方程和方块图如下:回章首回节首5(1) U i ( s ) - U x ( s ) = U R1 ( s )(2) U R1 ( s ) × 1 = I ( s) R1(3) I ( s ) - I 2 ( s ) = I1 ( s )( 4) I 1 ( s ) × 1 = U x ( s ) C1 s(5) U x ( s ) - U o ( s ) = U R2 ( s )回章首回节首6(6) U R2 ( s ) × 1 = I 2 ( s ) R2 (7 ) I 2 ( s ) × 1 = U o ( s ) C2 s将各基本环节的方块按照信号流通方向连接起来 就可以得到如图2-33所示的系统方块图。
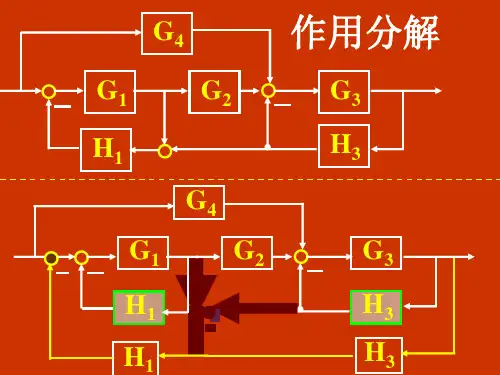
2-7 结构图等效变换及梅逊公式求传递函数时,需要对微分方程组(或变换方程组)进行消元,最后仅剩下输入、输出两个变量,因此中间变量的传递过程得不到反映。
若采用结构图,它就能形象地表明输入信号在系统或元件中的传递过程。
另外,下面将会看到,利用结构图,也便于求取传递函数。
所以,结构图在控制理论中应用十分广泛。
一、结构图在第2-6节中,我们曾采用消元法求得图2-24所示RC 网络的传递函数。
这里,我们采用结构图的方法求其传递函数。
RC 网络的微分方程组如下:⎪⎩⎪⎨⎧=+=⎰idt C u u Ri u c cr 1对上两式进行拉氏变换,得)()()(s U s RI s U c r +=或[])()()(1s I s U s U Rc r =- (2-54) )(1)(s I Css U r =(2-55)方程(2-54)可用图2-29)(a 表示,方程(2-55)可用图2-29)(b 表示。
将图2-29)(a )(b 按信号传递方向结合起来,网络的输入量置于图示的左端,输出量置于最右端,并将同一变量的信号连在一起,如图2-30)(a 所示,即得RC 网络结构图。
对图2-30)(a 进行所谓“等效变换”就可得出网络传递函数,因此网络结构就更为简单,如图2-30)(b 所示。
关于结构图等效变换的方法将另作介绍。
(1)建立控制系统各元、部件的微分方程。
(2)对各元、部件的微分方程进行拉氏变换,并做出各元、部件的结构图。
(3)按系统中各信号的传递顺序,依次将各元件结构图连接起来,便得到系统的结构图。
下面以图1-7所示随动系统为例。
把组成该系统各元部件的微分方程(2-18)进行拉氏变换,可得方程组(2-56e a ~),其中比较元件 )()()(s s s c r θθθε-=(2-56a ) 电位器 )()(1s K s U εεθ= (2-56b ) 放大器 )()(2s U k s U ε=(2-56c ) 电动机 )()()1(s U K s s T s m m =+εθ(2-56d ) 减速器)(1)(s is c θθ=(2-56e )各元、部件的结构图如图2-31所示。