凸轮轴检测1
- 格式:doc
- 大小:25.50 KB
- 文档页数:1
中级胜利基本信息:[矩阵文本题] *1.曲轴瓦、连杆瓦与曲轴之间的配合间隙过大会导致机油压力低。
[判断题] *对(正确答案)错2.磁感应式车速里程表的结构中没有电路连接。
[判断题] *对(正确答案)错3.液化天然气系统燃料计量阀的故障一般可用诊断软件的断缸断喷嘴模式检测。
[判断题] *对(正确答案)错4.汽车发动机电气性能测试仪用于测量进气歧管的真空度。
[判断题] *对错(正确答案)5.EQ1092型汽车蹄鼓间隙值支承端比凸轮端大。
[判断题] *对错(正确答案)6.雨刷器不能停到原始位置的原因是自动停位器有故障。
[判断题] *对错(正确答案)7.发动机缺火的主要原因之一是个别喷油器不工作。
[判断题] *对错(正确答案)8.电控发动机燃油泵工作电压应该用模拟式万用表检测。
[判断题] *对错(正确答案)9.若离合器间隙太小甚至没有间隙,离合器会出现"打滑”故障。
[判断题] *对(正确答案)错10.直拉杆应无明显变形,横拉杆的直线度公差为1.5mm。
[判断题] *对错(正确答案)11.当车辆采用非独立悬架时,车桥都是断开式的。
[判断题] *对(正确答案)错12.万向传动装置异响会发生在汽车不同运行状态。
[判断题] *对错(正确答案)13.两前轮车轮制动器间隙不一致是气压制动跑偏的原因之一。
[判断题] *对(正确答案)错14.检测发动机凸轮轴时,必须测量凸轮的圆度和圆柱度。
[判断题] *对错(正确答案)15.HFD类制冷剂包括R23、R32、R41、Rl25、R134、R143、R152。
[判断题] *对错(正确答案)16.职业道德大多都有实质的约束力和强制力。
[判断题] *对错(正确答案)17.验收发电机时应做空转试验无负载试验。
[判断题] *对(正确答案)错18.使中心高压没电的原因之一是分火头漏电。
[判断题] *对(正确答案)错19.在测量发动机汽缸体孔径时,必须在每个缸中上、中、下三个位置进行测量,其中下端位置是指活塞在下止点时,第一道环所对的缸壁位置。
力士乐驱动器报警代码DKC故障诊断1诊断信息F和诊断信息E的说明1.1错误诊断信息FF205 凸轮轴故障F207 切换至未初始化运行模式F208 UL电机类型已变F209 PL装载参数默认值F211 DISC-Error no.1(1#错误)F212 DISC-Error no.2(2#错误)F212 DISC-Error no.3(3#错误)F212 DISC-Error no.4(4#错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过最大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器1故障:象限错误F230 超过编码器1最大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器2故障:信号幅度错误F245 编码器2故障:象限错误F246 超过编码器2最大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 绝对编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD模块固件升级过程中出现错误F291 EMD模块超时F292 EMD模块过热F294 Ecox 客户端超时F296 Ecox 客户端数量不准确F297 Ecox 客户端错误F386 电源模块没有就绪信号F401 双MST故障关机F402 双MDT故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双SST故障关机F434 紧停E-STOPF629 超过正行程极限F630 超过负行程极限F634 紧停E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器1故障:信号幅度错误F843 编码器2故障:信号幅度错误F845 编码器2故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24v直流错误F873 电源驱动部分故障F878 速度环错误F880 经过优化的换算偏置错误1.2报警诊断信息EE211 DISC-#1报警E212 DISC-#2报警E212 DISC-#3报警E212 DISC-#4报警E217 冷却风扇转速太慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度>=S-0-0091E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率S-0-108=0E256 转矩限制=0E257 连续电流限制活动E258 选定的处理块未编程E259 指令速度限制活动E260 指令电流限制活动E261 连续电流限制预报警E263 速度指令值>极限S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD模块固件升级活动E289 等待Ecox服务器端扫描E291 EMD模块超时E293 EMD模块欠电压E296 Ecox客户端数量不准确E386 电源模块无就绪信号E408 MDT数据存储器A无效编址E409 A T数据存储器A无效编址E410 客户端未被扫描或地址为0E411 双SST故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2诊断信息B、C、D和诊断信息A的说明2.1指令诊断信息B、C和DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低B300 后备工作内存过程指令C100 通讯阶段3转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT的配置IDN不可配置C105 配置长度大于MDT最大长度C106 A T的配置IDN不可配置C107 配置长度大于A T最大长度C108 时间片参数大于Sercos循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 1D9+记录长度-1大于长度MDT(S-0-0010)C112 TNcyc(S-0-0001)或TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误C114 T4大于TScyc(S-0-0002)-T4min(S-0-0005)C115 T2数值太小C118 MDT配置顺序错误C200 通讯阶段4转换检查C201 无效参数(S)(->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型P-0-4014不准确C210 要求反馈2(->S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈1数据读取错误C218 反馈2数据读取错误C220 反馈1初始化错误C221 反馈2初始化错误C223 最大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈1(P-0-0074)C238 编码器2功能错误(->S-0-0022)C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022)C300 指令设定绝对测量C302 未安装绝对测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位1类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 绝对编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(->S-0-0021)C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166和P-0-0167D906 位移范围超出2.2状态诊断信息AA000 通讯阶段0A001 通讯阶段1A002 通讯阶段2A003 通讯阶段3A009 SERCOS接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器1的位置模式A103 使用编码器2的位置模式A104 位置模式,无滞后,编码器1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器2A108 驱动器控制的插补,无滞后,编码器1A109 驱动器控制的初步,无滞后,编码器2A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器1, 虚拟主驱动器A113 相位同步,编码器2. 虚拟主驱动器A114 相位同步,编码器1. 真实主驱动器A116 相位同步,无滞后,编码器1, 虚拟主驱动器A117 相位同步,无滞后,编码器2, 虚拟主驱动器A118 相位同步,无滞后,编码器1, 真实主驱动器A128 凸轮轴,编码器1, 虚拟主驱动器A129 凸轮轴,编码器2, 虚拟主驱动器A130 凸轮轴,编码器1, 真实主驱动器A132 凸轮轴,无滞后,编码器1, 虚拟主驱动器A133 凸轮轴,无滞后,编码器2, 虚拟主驱动器A134 凸轮轴,无滞后,编码器1, 真实主驱动器A150 驱动器控制的定位,编码器1A151 驱动器控制的定位,编码器1,无滞后A152 驱动器控制的定位,编码器2A153 驱动器控制的定位,编码器2,无滞后A154 编码器1,驱动器受控的位置模式A155 编码器1,无滞后,驱动器受控的位置模式A156 编码器2,驱动器受控的位置模式A157 编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码故障描述对策C0270 电机编码器数据读取错误电机编码器回路故障,检查可能出现的三个地方:电机编码器,反馈线及CSB的编码器反馈口。
中级工第一次模拟考(1—200)班级: [填空题] *_________________________________姓名: [填空题] *_________________________________1、下道工序对上道工序流转过来的产品进行抽检称为()。
[单选题] *A) 自检 (B) 互检 ((正确答案)C) 终检 (D) 巡检2、遵守职业道德是对每个从业人员的要求,从业人员在职业工作中慎待诺言,表里如一,言行一致遵守劳动纪律,这是职业道德中()。
[单选题] *A) 办事公道的基本要求 (B) 爱岗敬业的基本要求C) 诚实守信的基本要求 ((正确答案)D) 服务群众的基本要求3、特种作业人员经过()合格取得操作许可证者,方可上岗。
[单选题] *A) 公司考核 (B) 机构考试 (C) 专业测试 (D) 专业技术培训考试(正确答案)4、某轮胎的规格是175/70 H R13,其中R的含义是()。
[单选题] *A) 应急轮胎 (B) 斜交轮胎 (C) 子午线轮胎 ((正确答案)D) 无内胎轮胎5、轴承代号由前置代号、基本代号和()组成。
[单选题] *A) 系列代号 (B) 内径代号 (C) 宽度代号 (D) 后置代号(正确答案)6、正弦交流电的有效值()。
[单选题] *A) 在正半周不变化,负半周变化 (B) 在正半周变化,负半周不变化C) 不随交流电的变化而变化 ((正确答案)D) 不随交流电的变化而不变化7、()回路可使工作部件在运动过程中的某一位置上停留一段时间保持不动。
[单选题] *A) 换向 (B) 顺序 (C) 锁紧 ((正确答案)D) 减压8、用诊断仪对发动机进行检测,点火开关应()。
[单选题] *A) 关闭 (B) 打开 ((正确答案)C) 位于启动档 (D) 位于锁止档9、()用于测试蓄电池端电压。
[单选题] *A) 万用表 ((正确答案)B) 气压表 (C) 真空表 (D) 油压表10、用液压千斤顶支顶车辆,应用进行()辅助支撑后方可进入车底作业。

1ZR-FE发动机一个汽缸或多个汽缸缺火故障的诊断和排除发布时间:2021-06-22T07:02:16.412Z 来源:《防护工程》2021年5期作者:杜瑞彬李新雷[导读] 汽车发动机是内燃机的一种,它是将燃料在汽缸内部燃烧得到的热能转变为机械功的热力发动机。
发动机要实现这种转变,它应该具备七个基本组成部分:燃料供给系统、曲柄连杆机构、配气机构、启动系统、润滑系统、冷却系统和点火系统。
一般发动机总体构造都包括以上几大系统。
但由于气缸数、气缸排列方式和冷却方式不同,其构造有些差异。
电控发动机的燃油供给系采用电子自动控制装置,包括许多传感器、执行元件和ECU。
山东交通技师学院汽车学院山东临沂 276000摘要:汽车发动机是内燃机的一种,它是将燃料在汽缸内部燃烧得到的热能转变为机械功的热力发动机。
发动机要实现这种转变,它应该具备七个基本组成部分:燃料供给系统、曲柄连杆机构、配气机构、启动系统、润滑系统、冷却系统和点火系统。
一般发动机总体构造都包括以上几大系统。
但由于气缸数、气缸排列方式和冷却方式不同,其构造有些差异。
电控发动机的燃油供给系采用电子自动控制装置,包括许多传感器、执行元件和ECU。
关键字:发动机,电子控制技术,故障诊断,故障排除一、工作原理当1ZR-FE发动机缺火时,高浓度碳氢化合物进入废气中。
极高浓度的碳氢化合物会使废气排放量增加。
高浓度的碳氢化合物也会使三元催化净化器的温度升高,可能导致其损坏。
为了避免排放量的增加以及高温造成的损坏,ECM监测发动机缺火率。
当三元催化净化器的温度达到热衰退点时,ECM会使MIL闪烁。
ECM使用凸轮轴位置传感器和曲轴位置传感器监测缺火情况。
凸轮轴位置传感器用于识别缺火的汽缸,而曲轴位置传感器则用于测量曲轴转速的变化。
当曲轴转速变化超出预定阈值时,将统计缺火数,并设置一个DTC。
二、故障现象及判断思路用故障诊断仪读取DTC后,有故障码P0300(几个汽缸同时缺火)或P0301、P0302、P0303、P0304(某个汽缸缺火)。
13秋汽《汽车发动机》抽考题(4)一、判断题(共计40题)1.基本偏差是用来确定公差带相对零线位置的上偏差或下偏差,一般指靠近零线的那个偏差。
(√)2.多楔带兼有平带和V带的优点:柔性好,摩擦力大,能传递的功率大,并解决了多根V 带长短不一而使各带受力不均的问题。
(√)3.蜗杆传动摩擦损失大,传动效率低,发热量大,不适于功率过大、长期连续工作处。
(√)4.汽车微机系统采用的是八位二进制码的形式,八位数为一个字节。
(√)5.无论传感器的信号类型是否一样,输入ECU后的处理方法都一样。
(×)6.燃油消耗率是指单位有效功率的燃油消耗量,也就是发动机每发出1 kW有效功率所消耗的燃油质量(以L为单位)。
(×)7.液压传动可以在温度变化很大的环境条件下工作。
(×)9.汽缸体上、下平面在螺纹孔口周围凸起,通常是由于在高温下拆卸汽缸盖导致的。
(×)10.汽缸磨损的最大部位是活塞在上止点位置时第一道活塞环相对应的汽缸壁。
(√)11. 1.配气机构的作用是按照发动机各缸的作功次序和每一缸工作循环的要求,适时地将各缸进气门与排气门打开、关闭,以便发动机进行进气、压缩、作功和排气等工作过程。
(√)12.发动机采用多气门结构后,排气门的直径可适当减小,使其工作温度相应降低,提高了工作可靠性(√)13.因为发动机的排气压力较进气压力大,所以在5气门式的配气机构中,往往采用三个进气门和两个排气门。
(√)14.采用多气门后还可适当增大气门升程,改善配气机构的性能。
(×)15.当每缸采用多气门时,气门排列的方案通常是异名气门排成一列。
(×)16.四冲程发动机完成一个工作循环,曲轴旋转两周(720°),各缸进、排气门各开启1次,凸轮轴只需转1周,因此曲轴转速与凸轮轴转速之比为2∶1。
(√)17.气门的开启是通过气门传动组的作用来完成的,而气门的关闭则是由气门弹簧来完成的。


乐风a凸轮轴位置响应慢缸组1乐风a凸轮轴位置响应慢缸组1是一种汽车发动机故障,它会导致凸轮轴在发动机运行过程中的位置响应变慢。
这种问题可能会影响发动机的性能和燃料经济性。
在本文中,我们将对乐风a凸轮轴位置响应慢缸组1进行全面评估并探讨其可能的原因和解决方案。
1. 基本概念介绍乐风a凸轮轴位置响应慢缸组1是指发动机某个缸组中的凸轮轴在响应引擎控制模块指令时反应较慢。
凸轮轴作为发动机的关键部件之一,控制着气门的开启和关闭,以控制燃料进入和废气排出。
2. 问题的影响乐风a凸轮轴位置响应慢缸组1会导致该缸组中的气门打开和关闭不及时,这可能会导致燃烧不完全和排放问题。
凸轮轴响应慢也会影响发动机的性能,例如加速度和动力输出。
3. 可能的原因乐风a凸轮轴位置响应慢缸组1可能有多种原因。
其中可能的原因包括凸轮轴传感器故障、凸轮轴调节阀故障、凸轮轴传动系统问题等。
这些问题可能导致凸轮轴位置信号不准确或传导不良,从而影响凸轮轴的响应速度。
4. 解决方案解决乐风a凸轮轴位置响应慢缸组1的问题需要进行详细的故障诊断和修复。
在诊断过程中,可以使用汽车诊断工具来检查凸轮轴位置传感器和调节阀的工作情况。
如果发现故障,应及时更换或修复这些部件。
另外,还应检查凸轮轴传动系统是否存在问题,例如链条或齿轮损坏。
修复这些问题可以恢复发动机的正常工作状态。
5. 总结和回顾乐风a凸轮轴位置响应慢缸组1是发动机故障的一种,它会导致凸轮轴在发动机运行过程中的位置响应变慢。
这可能会影响发动机性能和燃料经济性。
通过对凸轮轴传感器、凸轮轴调节阀和凸轮轴传动系统进行检查和修复,可以解决这个问题。
及时的故障诊断和维修对确保发动机正常运行至关重要。
个人观点和理解:对于乐风a凸轮轴位置响应慢缸组1这个问题,我认为关键在于故障的及时发现和解决。
凸轮轴作为发动机的关键部件,其工作状态直接影响整个发动机的效能。
我们应该定期进行维护和检查,确保凸轮轴的正常运行。
我还想强调发动机故障的预防和提醒驾驶员在发动机工作异常时及时检查和修复,以确保车辆的安全性和稳定性。
力士乐报警代码及说明一揽(总15页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--力士乐报警代码及说明一揽力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询。
DKC故障诊断1诊断信息F和诊断信息E的说明错误诊断信息FF205凸轮轴故障F207切换至未初始化运行模式F208UL电机类型已变F209PL装载参数默认值F211DISC-Error(1#错误)F212F212F212DISC-Error(2#错误)DISC-Error(3#错误)DISC-Error (4#错误) F217未接冷却风扇F218放大器过热关机F219电机过热关机F220制动电阻器过载关机F221电机温度监控器故障F223?停止轴时的初始化过程错误F224超过最大制动时间F226功率部分欠电压F228?过大偏差F229编码器1故障:象限错误F230超过编码器1最大信号频率F236位置反馈的差值过大F237?位置指令的差值过大F238实际速度值的差值过大F242编码器2故障:信号幅度错误F245编码器2故障:象限错误F246超过编码器2最大信号频率F248?电池电压过低F249主驱动器编码器故障:信号太小F250?目标位置预置内存溢出F252主驱动器编码器故障:象限错误F253增量编码器仿真:脉冲频率太高F260?指令电流极限关闭F262状态输出口出现外部短路F267内部硬件同步错误F269电机制动器释放过程中错误F276绝对编码器超出允许的窗口F277?电流测量补偿错误F281主回路故障F288EMD模块固件升级过程中出现错误 F291EMD模块超时F292EMD模块过热F294Ecox客户端超时F296Ecox客户端数量不准确F297Ecox客户端错误F386电源模块没有就绪信号F401双MST故障关机F402双MDT故障关机F403通信阶段关机F404阶段前进过程中出现错误F405?阶段后退过程中出现错误F406阶段切换无就绪信号F407?主通信初始化过程中的错误F411双SST故障关机F434紧停E-STOPF629超过正行程极限F630超过负行程极限F634紧停E-STOPF643?探测到正行程极位开关F644探测到负行程限位开关F811换算偏置无法确定F812?在换算过程中移动越程F822编码器1故障:信号幅度错误F843编码器2故障:信号幅度错误F845编码器2故障:象限错误F850?看门狗协处理器F860过流:功率部分有短路F870+24v直流错误F873电源驱动部分故障F878速度环错误F880经过优化的换算偏置错误报警诊断信息EE211DISC-#1报警E212E212E212DISC-#2报警DISC-#3报警DISC-#4报警E217冷却风扇转速太慢E221?报警电机温度监控有故障E225电机过载E226功率部分欠电压E247插补速度=0E248?插补加速度=0E249定位速度>=S-0-0091E250驱动器过热预报警E251电机过热预报警E252制动电阻器过载预报警E253?目标位置超出行程范围E254未回零E255进给倍率S-0-108=0E256?转矩限制=0E257连续电流限制活动E258选定的处理块未编程E259指令速度限制活动261?连续电流限制预报警E263速度指令值>极限S-0-0091E264?目标位置超过数字范围E267硬件同步有故障E269制动器的制动转矩太低E281主回路故障E288EMD模块固件升级活动EMD模块超时EMD模块欠电压Ecox客户端数量不准确E289等待Ecox服务器端扫描E291E293E296 E386电源模块无就绪信号E408MDT数据存储器A无效编址E409AT数据存储器A无效编址E410客户端未被扫描或地址为0E411双SST故障E825功率部分过电压E826功率部分欠电压E829超过正位置极限E830超过负位置极限E831在点动过程中达到位置极限E834紧停E-STOPE843?正限位开关活动E844负限位开关活动E881主回路故障E886电源模块没有准备好信号2诊断信息B、C、D和诊断信息A的说明指令诊断信息B、C和DB100指令释放电机制动器B101?指令未使能B200制动器检查指令B201只在驱动器使能时进行制动器检查B202在制动器嵌入过程中出现错误B203制动器制动转矩太低 B300后备工作内存过程指令C100通讯阶段3转换检查C101无效通信参数(S-0-0021)C102?通信参数极限错误(S-0-0021)C104MDT的配置IDN不可配置C105配置长度大于MDT最大长度C106AT的配置IDN不可配置C107配置长度大于AT最大长度C108时间片参数大于Sercos循环时间C109MDT(S-0-0009)中的数据记录位置为偶数C110MDT(S-0-0010)长度为奇数C1111D9+记录长度-1大于长度MDT(S-0-0010) C112TNcyc(S-0-0001)或TScyc(S-0-0002)错误C113TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误C114T4大于TScyc(S-0-0002)-T4min(S-0-0005)C115T2数值太小C118MDT配置顺序错误C200通讯阶段4转换检查C201无效参数(S)(->S-0-0022)C202参数极限错误(->S-0-0022)C203参数计算错误(->S-0-0022)C204电机类型P-0-4014不准确C210要求反馈2(->S-0-0022)C211无效反馈数据(->S-0-0022)C212无效放大数据(->S-0-0022)C213?位置数据比例错误C214速度数据比例错误C215加速度数据比例错误C216?转矩/力数据比例错误C217反馈1数据读取错误C218反馈2数据读取错误C220反馈1初始化错误C221反馈2初始化错误C223?最大范围输入值太高C227模范围错误C234编码器不能组合C235负载侧电机编码器只可用于感应电机C236要求反馈1(P-0-0074)C238编码器2功能错误(->S-0-0022)C241必须为二进制编码器分辨率C242?一个参数的多重配置(->S-0-0022)C300指令设定绝对测量C302未安装绝对测量系统C400切换至参数方式 C401驱动器使能时,不允许切换C402?只允许在没有上位控制时C500复位1类诊断,错误复位C600驱动器控制的回零过程指令C601只在驱动器使能时才能够回零C602距离回零开关-参考标记错误C604绝对编码器不能回零C606未探测出参考标记C700基本参数装载C702默认参数不可用C703?默认参数无效C704参数不可拷贝C800调入默认参数C801?参数默认值错误(->S-0-0021)C802密码锁定D300指令调整换算D301?驱动器未做好换算指令准备D302电机转矩/力太小,无法运动D303指令启动时驱动器处于控制状态D304偏置计算错误D305驱动器使能被拒绝D306系统断电D307驱动器不运动D308无法调整异步电机D309进入阶段4D310输入主密码D311?不能确定换算偏置D312在换算过程中超过运动范围D500指令获取标志位置D501要求增量编码器D600?取消回参考点过程指令D700轴禁止指令D701仅可在驱动器无使能时使用轴禁止指令D800测量轮模式指令D801测量轮不能运行D900?自动控制环调整指令D901启动要求驱动器使能D902电机反馈数据无效D903?惯量检测失败D904增益调整失败D905位移范围无效,P-0-0166和P-0-0167D906?位移范围超出状态诊断信息AA000通讯阶段0A001通讯阶段1A002A003A009通讯阶段2通讯阶段3SERCOS接口的自动波特率检测A010?驱动停止A012控制和功率部分运行准备就绪A013接通电源准备就绪A100?驱动器处于转矩控制模式下A101驱动器处于速度控制模式下A102使用编码器1的位置模式A103使用编码器2的位置模式A104位置模式,无滞后,编码器1A105位置模式,无滞后,反馈2A106驱动器控制的插补,编码器1A107驱动器控制的插补,编码器2A108驱动器控制的插补,无滞后,编码器1A109驱动器控制的初步,无滞后,编码器2A110?速度同步,虚拟主驱动器A111速度同步,真实主驱动器A112相位同步,编码器1,虚拟主驱动器A113相位同步,编码器2.虚拟主驱动器A114相位同步,编码器1.真实主驱动器A116相位同步,无滞后,编码器1,虚拟主驱动器A117相位同步,无滞后,编码器2,虚拟主驱动器A118相位同步,无滞后,编码器1,真实主驱动器A128凸轮轴,编码器1,虚拟主驱动器A129凸轮轴,编码器2,虚拟主驱动器A130凸轮轴,编码器1,真实主驱动器A132凸轮轴,无滞后,编码器1,虚拟主驱动器A133凸轮轴,无滞后,编码器2,虚拟主驱动器A134凸轮轴,无滞后,编码器1,真实主驱动器A150驱动器控制的定位,编码器1A151驱动器控制的定位,编码器1,无滞后A152驱动器控制的定位,编码器2A153驱动器控制的定位,编码器2,无滞后A154编码器1,驱动器受控的位置模式A155编码器1,无滞后,驱动器受控的位置模式A156编码器2,驱动器受控的位置模式A157编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器 1A207 数据处理块模式,无滞后,编码器 1A208 正向点动模式A210 数据处理块模式,编码器 2A211 数据处理块模式,无滞后,编码器 2 A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码C0270 故障描述电机编码器数据读取错误电机的型号参数 P-0-4014 有误。
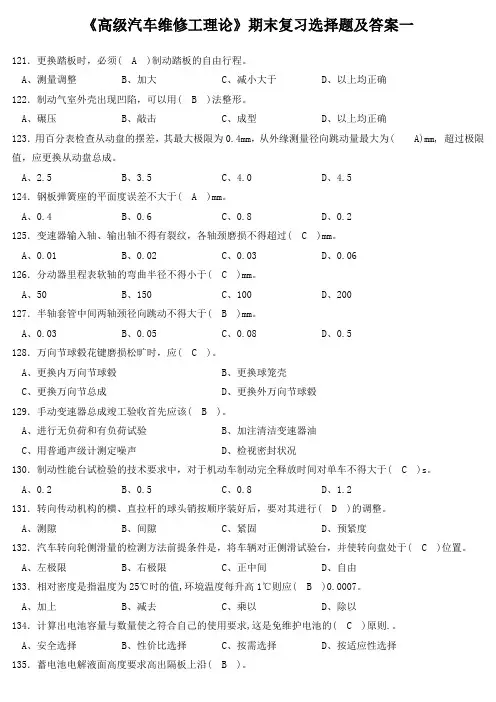
《高级汽车维修工理论》期末复习选择题及答案一121.更换踏板时,必须( A )制动踏板的自由行程。
A、测量调整B、加大C、减小大于D、以上均正确122.制动气室外壳出现凹陷,可以用( B )法整形。
A、碾压B、敲击C、成型D、以上均正确123.用百分表检查从动盘的摆差,其最大极限为0.4mm,从外缘测量径向跳动量最大为( A)mm, 超过极限值,应更换从动盘总成。
A、2.5B、3.5C、4.0D、4.5124.钢板弹簧座的平面度误差不大于( A )mm。
A、0.4B、0.6C、0.8D、0.2125.变速器输入轴、输出轴不得有裂纹,各轴颈磨损不得超过( C )mm。
A、0.01B、0.02C、0.03D、0.06126.分动器里程表软轴的弯曲半径不得小于( C )mm。
A、50B、150C、100D、200127.半轴套管中间两轴颈径向跳动不得大于( B )mm。
A、0.03B、0.05C、0.08D、0.5128.万向节球毂花键磨损松旷时,应( C )。
A、更换内万向节球毂B、更换球笼壳C、更换万向节总成D、更换外万向节球毂129.手动变速器总成竣工验收首先应该( B )。
A、进行无负荷和有负荷试验B、加注清洁变速器油C、用普通声级计测定噪声D、检视密封状况130.制动性能台试检验的技术要求中,对于机动车制动完全释放时间对单车不得大于( C )s。
A、0.2B、0.5C、0.8D、1.2131.转向传动机构的横、直拉杆的球头销按顺序装好后,要对其进行( D )的调整。
A、测隙B、间隙C、紧固D、预紧度132.汽车转向轮侧滑量的检测方法前提条件是,将车辆对正侧滑试验台,并使转向盘处于( C )位置。
A、左极限B、右极限C、正中间D、自由133.相对密度是指温度为25℃时的值,环境温度每升高1℃则应( B )0.0007。
A、加上B、减去C、乘以D、除以134.计算出电池容量与数量使之符合自己的使用要求,这是免维护电池的( C )原则.。
057凸轮轴及轴承更换全攻略(1)四冲程发动机的配气机构较为复杂,型式也多种多样。
按气门的布置形式,主要有气门顶置式和气门侧置式;按凸轮轴的布置分,有凸轮轴上置式、凸轮轴中置式和凸轮轴下置式;按凸轮轴的数量分,有单凸轮轴和双凸轮轴;按曲轴驱动凸轮的方式分,有齿轮传动和链条传动。
摩托车发动机基本采用凸轮轴上置式和下置式,单凸轮轴、双凸轮轴和链条传动方式(少数机型采用齿轮传动如:CG125车)。
凸轮轴及轴承随着摩托车发动机数万km 的运行,极易磨损或损耗。
本文就常用凸轮轴及轴承的结构特点、检查更换、规范操作和注意要点等方面进行探讨(有关气门、摇臂等其它相关零件,另撰文介绍)。
1 结构特点1.1 顶置气门式(OHV )在摩托车发动机试制的初始阶段,顶置式气门均采用下置凸轮式配气机构。
这种配气机构将凸轮轴布置在左曲轴箱内,用一对齿轮来实现曲轴与凸轮轴之间的可靠传动。
在本田CG110、CG125、CG400/500等摩托车上便采用这种型式的配气机构(如图1、2所示)。
由于凸轮轴远离燃烧室,改善了凸轮轴的环境工作温度。
在吸气行程时,曲轴转动通过正时齿轮带动凸轮轴(即凸轮轴上安装有同步齿轮),凸轮轴带动下文/微 波凸轮轴凸轮轴正时传动齿轮波形弹垫气门下摇臂凸轮轴及正时链轮专为润滑凸轮轴及齿轮的小油池曲轴正时传动齿轮推杆1205846578213顶置凸轮轴配气机构1—气门摇臂;2—凸轮轴;3—气门弹簧;4—张紧器;5—链条张紧板;6—气门;7—正时链条;8—正时链轮摇臂,下摇臂推动推杆,推杆推动上摇臂,上摇臂顶开气门,使新鲜混合气进入气缸。
随着曲轴的旋转,凸轮轴也相应地改变其角度,从而改变气门的开闭。
这样,在压缩冲程,进、排气门都处于关闭状态;在做功行程中,进、排气门均关闭;而到排气行程时,排气门则打开,从而使发动机连续运转工作。
1.2 顶置凸轮轴式(OHC )顶置凸轮轴式配气机构,有顶置单凸轮轴(SOHC 如图3所示)和顶置双凸轮轴(DOHC )两种。
凸轮测量测头转换及当量升程表计算方法1 概述凸轮轴是影响发动机配气机构工作质量的关键部件,它的功能是保证发动机气门组有准确、平稳的良好运动规律。
凸轮的测量,主要是为评定凸轮轴上各凸轮的几何精度和装机后的动力特性提供依据,所以,在对凸轮进行测量时,应按设计要求选择与凸轮机构从动件(挺柱)相同形式和形状的测头,按设计要求给出的转角—升程表进行测量,以正确反映凸轮机构的运动规律。
2 测头转换测头转换,不是指简单地将一种测头换成另一种测头,而是指采用不符合设计要求形式和形状的测头进行凸轮测量时测量参数的转换。
在测量中,把不符合设计要求形式和形状的测头卸下,装上符合设计要求形式和形状的测头的一组操作称为测头换装。
测头转换和测头换装是两个截然不同的概念。
无论是确定凸轮的检测位置,还是测量凸轮的升程,都应采用与凸轮机构从动件(挺柱)相同形式和形状的测头。
例如,S195 型柴油机的配气凸轮的从动件是平面挺柱,测量时应采用平面测头:供油凸轮的从动件是滚柱挺柱,测量时应采用与滚柱挺柱直径相同的滚柱测头。
可是,常常是当同一根凸轮轴上各凸轮的从动件设计要求不同时,本应分别采用符合设计要求的不同形式和形状的测头进行测量,可是一些测量者为了省去在测量过程中换装测头的麻烦,竟用同一测头去测量凸轮轴上各个凸轮,这对某一个凸轮而言就引发了测头转换问题,尤其是在凸轮自动测量时,这种转换测头形式和形状的现象更为普遍。
图1 凸轮受检点相同时测头不同凸轮转角不同测头形式和形状转换后,改用当量升程表测量,原理上并不存在问题。
但是现行当量升程表,一般均以设计转角为依据而不是以设计受检点为依据来计算。
也就是说,如果测头转换后与转换前的转角一致,则凸轮受检点将不同:如果测头转换前后受检点相同,则凸轮转角不同。
例如,S195 型柴油机配气凸轮的“敏感点”m ,采用设计要求的平面测头测量时,凸轮转角ap=46°07'16"(图1a):采用Ø15mm 滚柱测头时,凸轮转角aG=16°53' (图1b):采用刀口测头时,凸轮转角aD= 6°52'28"(图1c)。