回原点程序顺序功能图
- 格式:pdf
- 大小:67.92 KB
- 文档页数:1



5.6 顺序功能图语言S7 Graph 的应用5.6.1 S7 Graph 语言概述S7 Graph 语言是S7-300/400的顺序功能图语言,遵从IEC 61131-3标准的规定。
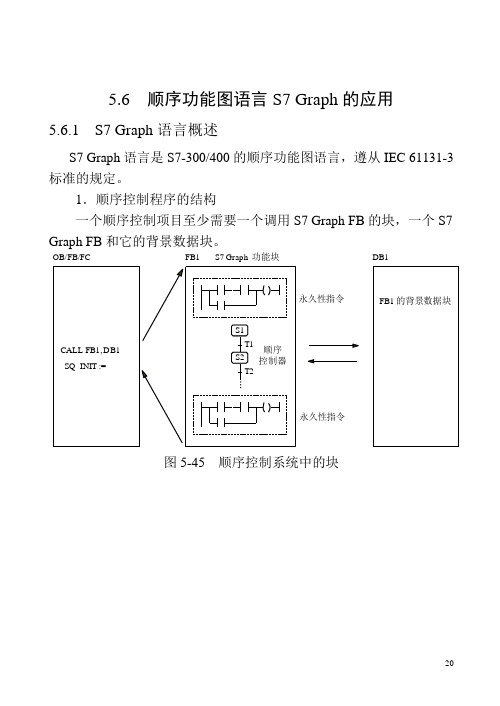
1.顺序控制程序的结构一个顺序控制项目至少需要一个调用S7 Graph FB 的块,一个S7 Graph FB 和它的背景数据块。
CALL FB1, DB1SQ_INIT :=OB/FB/FCFB1DB1永久性指令永久性指令S7 Graph 功能块FB1的背景数据块图5-45 顺序控制系统中的块图5-46 S7 Graph 编辑器步与转换跳步分支中止选择序列的分支选择序列的合并并行序列的分支并行序列的合并选择对象预选/直接插入监视时间T 插入监视时间U 插入永久条件插入动作插入永久性FB ,FC 调用插入顺序控制器“Drag and Drop ”模式时与鼠标一起移动的图形图5-49 顺序控制器工具条与移动的图形3.S7 Graph 的显示模式在View 菜单中选择显示顺序控制器(Sequencer )、单步和永久性指令。
(1)在顺序控制器显示方式,执行菜单命令“View>Display with ”,可以选择:Symbols :显示符号表中的符号地址; Comments :显示块和步的注释;Conditions and Actions:显示转换条件和动作;Symbol List:在输入地址时显示下拉式符号地址表。
(2)单步显示模式只显示一个步和转换的组合,还可以显示Supervision:监控被显示的步的条件;Interlock:对被显示的步互锁的条件;执行命令“View>Display with> comments”显示和编辑步的注释。
用“↑”键或“↓”键可以显示上一个或下一个步与转换的组合。
(3)在“permanent instructions”(永久性指令)显示方式,可以对顺序控制器之前或之后的永久性指令编程。

物料搬运机械手系统PLC 编程设计课程名称:可编程控制器原理及应用 任课教师:冯治国老师 班级:机制102班 学号: 姓名:一、设计题目及概述(一) 设计题目如图1所示为一简易物料搬运机械手的工艺流程图。
该机械手是一个水平/垂直位移的机械设备,其操作是将工件从左工作台搬运到右工作台,由光耦合器VLC 来检测工作台上有没有工件。
机械手通常位于原点,它的动作全部由气缸驱动,而气缸则由相应的电磁阀控制。
其中,上升/下降和左移/右移分别由双线圈二位电磁阀控制,放松/夹紧由一个单线圈二位电磁阀(称为夹紧电磁阀>控制。
成绩图1 简易物料搬运机械手(二)设计概述PLC控制系统的设计包括3个重要的环节,其一是通过控制任务的分析,确定控制系统的总体设计方案;其二是根据控制要求确定硬件构成方案;其三是设计出满足控制要求的应用程序。
二、对设计任务的深入调查研究(一)机械手的工作方式此系统需要具备多种工作方式,如既能自动的循环运行一个过程,也能进行手动操作运行一个工作步等。
常见的工作方式有联系、单周期、单步和手动。
1.单周期方式机械手在原位压左限位开关和上限位开关。
按一次操作按钮机械手开始下降,下降到左工位压动下限位开关后自停;接着机械手夹紧工件后开始上升,上升到原位压动上限位开关后自停;接着机械手开始右行直至压动右限位开关开关后自停;接着机械手下降,下降到右工位压动下限位开关<两个工位用一个下限位开关)后自停;接着机械手放松工件后开始上升直至压动上限位开关后自停<两个工位用一个上限位开关);接着机械手开始左行直至压动左限位开关后自停。
至此一个周期的动作结束,再按一次操作按钮则开始下一个周期的运行。
2.连续方式启动后机械手反复运行上述每个周期的动作过程,即周期性连续运行。
3.单步方式每按一次操作按钮,机械手完成一个工作步。
例如,按一次操作按钮机械手开始下降,下降到左限位压动下限位开关自停,欲使之运行下一个工作步,必须再按一次操作按钮等。

运动控制器“原点返回”的14种模式及参数说明第一部分运动控制器“原点返回”的14种模式1.DOG1型------以DOG开关从ON—OFF 后的第1个零点(Z相)信号作为“原点”图1. DOG1型原点返回模式对“原点返回”模式各名词的说明(参见图1)①“原点返回”---又称为“回原点模式”,“回零模式”,“原点回归模式”,本文统一为“原点返回模式”。
②“原点返回方向”---本文简称“正向”。
与该方向相反简称为“反向”。
③近点DOG开关---也称为“原点开关”,“看门狗开关”。
本文简称为“DOG开关”(“DOG开关”为常OFF接法)④“原点返回速度”------本文简称为“高速”⑤“爬行速度”—也称为“蠕动速度”。
本文简称为“爬行速度”⑥零点信号-------本文简称为“Z相信号”。
(零点信号就是Z向信号,当编码器安装固定后,就是固定位置(对于电机一转之内的位置而言)⑦近点DOG ON后的移动量------本文简称为“T行程”⑧减速停止点------本文简称为“A点”1.1 “原点返回”的动作顺序①“原点返回”启动,以“高速”运行;②碰上DOG=ON,从“高速”降低到“爬行速度”;③当DOG从ON---OFF,从“爬行速度”减速停止,速度降为零。
又从“零速”上升到“爬行速度”,当检测到第1个“Z相信号”时,该“Z相信号”位置就是“原点”。
同时该轴停止在原点位置上。
(从“减速停止点A”到“Z相)信号”点是定位过程,所以能够精确定位)1.2 “原点返回”不能正常执行的原因(1)从“原点返回启动位置”到“减速停止点A”这一区间内如果没有经过“Z相信号”点一次,(Z相通过信号M2406+20N),系统会产生报警(ZCT)并减速停止。
(ZCT)(错误代码120). “原点返回”不能正常执行。
(这种情况是“原点返回启动位置”到“DOG”距离很短。
走完DOG的行程还没经过“Z相信号”,系统无法识别“Z相信号”位置。
0.前言可编程序控制器(Programmable Logic Controller)是以微处理器为核心,综合了微电子技术、自动化技术、网络通讯技术于一体的通用工业控制器。
英文缩写为PC 或PLC。
它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
1968年,美国通用汽车公司(GM)为适应生产工艺不断更新的需要,提出一种设想:把计算机的功能完善、通用、灵活等优点和继电器控制系统的简单易懂、操作方便、价格便宜等优点结合起来,制成一种通用控制装置。
这种通用控制装置把计算机的编程方法和程序输入方式加以简化,采用面向控制过程、面向对象的语言编程,使不熟悉计算机的方便使用。
美国数字设备公司(DEC)根据这一设想,于1969年研制成功了第一台可编程序控制器PDP-14,在汽车自动装配线上试用并获得成功。
该设备用计算机作为核心设备。
其控制功能是通过存储在计算机中的程序来实现的,这就是人们常说的存储程序控制。
由于当时主要用于顺序控制,只能进行逻辑运算,故称为可编程序逻辑控制器(Programmable Logic Controller,简称PLC)。
进入20世纪80年代,随着微电子技术和计算机技术的迅猛发展,也使得可编程序控制器逐步形成具有特色的多种系列产品。
系统中不仅有大量的开关量,而且使用了模拟量,其功能已经远远超出逻辑控制、顺序控制的应用范围。
故称为可编程序控制器(Programmable Logic Controller,简称PC)。
但由于PC容易和个人计算机(Personal Computer)混淆,所以人们还沿用PLC作为可编程控制器的英文缩写。
本课程设计是PLC课程课堂教学的延伸和发展,是理论知识与工程实践之间的衔接。
课程设计的主要目的是通过设计实践,了解一般电气控制系统设计过程、设计要求、应完成的工作内容和具体设计方法。
交通信号灯控制--顺序功能图.交通信号灯控制⼀、任务⽬标⼆、任务分析城市交通道路⼗字路⼝是靠交通指挥信号来维持交通秩序的。
在每个⽅向都有红、黄、绿三种指挥灯,信号灯的动作受开关总体控制,当按下启动按钮,信号灯系统开始⼯作,并周⽽复始地循环动作;按下停⽌按钮开关,系统停⽌⼯作。
图4—16是某城市⼀交通信号灯⽰意图。
图4-16 交通信号灯⽰意图在系统⼯作时,控制要求如表4-8所⽰:表4-8 ⼗字路⼝交通信号灯控制要求南北信号红灯亮绿灯亮绿灯闪亮黄灯亮时间30 25 32东西信号绿灯亮绿灯闪亮黄灯亮红灯亮时间2532301.⽤PLC 构成交通信号灯控制系统。
2.掌握PLC 的编程技巧和程序调试⽅法。
3.掌握步进指令的应⽤。
具体控制要求如下:1.南北⽅向绿灯和东西⽅向绿灯不能同时亮,如果同时亮则应⽤⾃动⽴即关闭信号灯系统,并⽴即发出报警信号。
2.南北红灯亮维持30s,在此同时东西绿灯也亮,并维持25s时间,到25s时,东西绿灯闪亮,闪亮3s后熄⽕,在东西绿灯熄灭时,东西黄灯亮并维持2s。
到2s时,东西黄灯熄灭,东西红灯亮,同时南北红灯熄灭,南北绿灯亮。
3.东西红灯亮维持30s,在此同时南北绿灯亮维持25s,然后闪亮3s熄灭,接着南北黄灯亮维持2s后熄灭.同时南北红灯亮,东西绿灯亮。
4.两个⽅向的信号灯,按上⾯的要求周⽽复始地进⾏⼯作。
三、相关知识步进指令STL/RET及编程⽅法1.FX2的状态元件状态元件是构成状态转移图的基本元素,是可编程控制器的软元件之⼀。
FX2共有1000个状态元件,如表4-9所⽰。
表4-9 FX2的状态元件类别元件编号个数⽤途及特点初始状态S0~S910⽤作SFC的初始状态返回状态S10~S1910多运⾏模式控制当中,⽤作返回原点的状态⼀般状态S20~S499480⽤作SFC的中间状态掉电保持状态S500~S899400具有停电保持功能,停电恢复后需继续执⾏的场合,可⽤这些状态元件信号报警状态S900~S999100⽤作报警元件使⽤2.步进指令、状态转换图及步进梯形图步进指令是利⽤状态转换图来设计梯形图的⼀种指令,状态转换图可以直观地表达⼯艺流程。